| Скачать .docx |
Курсовая работа: Схема и основные характеристики технологической установки
Федеральное агентство по образованию Российской Федерации
Орловский государственный технический университет
Кафедра "Электрооборудование и энергосбережение "
Пояснительная записка
к курсовой работе по дисциплине АСУТП
Работу выполнил
студент группы 41-ТК: Чернышова В.А.
Шифр 030917
Руководитель работы:
Комаристый А.С.
Курсовая работа защищена
с оценкой _____________
2007 г.
Содержание
1. Схема и основные характеристики технологической установки. 5
2. Составление функциональной схемы автоматизации технологической установки. 6
3. Построение кривой разгона объекта по каналу регулирования, выбор типа регулятора. 8
4. Определение пригодности регулятора и параметров его настроек. 11
5. Анализ АСР на устойчивость по критериям устойчивости Гурвица и Михайлова. 14
5. Анализ АСР на устойчивость по критериям устойчивости Гурвица и Михайлова. 14
5.1 Определение устойчивости системы по критерию Гурвица. 15
5.2 Проверка устойчивости САУ по критерию Михайлова. 16
6. Определение запаса устойчивости АСР по фазе. 19
Введение
Автоматика - отрасль науки и техники, охватывающая теорию и принципы построения средств и систем управления производственным процессом. Автоматика является основой автоматизации.
Автоматизация - этап развития машинного производства, который характеризуется освобождением человека от непосредственного выполнения функций управления производственными процессами и передачей этих функций техническим устройствам.
Управление производственным процессом - это такое воздействие на него, которое обеспечивает оптимальный или заданный режим работы. Объект управления - управляемый производственный процесс. Совокупность технических средств, используемых для управления, и производственного персонала, который принимает в нем непосредственного участие, образует совместно с объектом систему управления.
Процесс управления складывается из следующих основных функций, которые выполняются системой управления:
получение измерительной информации о состоянии производственного процесса как объекта управления;
переработка полученной информации и принятии решения о необходимом воздействии на объект для достижения целей управления;
реализация принятого решения, т.е. непосредственное воздействие на производственный процесс.
Средство измерений - это средство, предназначенное для получения информации о состоянии объекта управления.
Среди автоматических систем наиболее распространены автоматические системы регулирования (АСР). АСР предназначены для поддержания заданных значений технологических параметров, которые характеризуют состояние производственного процесса как объекта регулирования. С появлением новых технических средств, в практику автоматизации вошел новый тип систем управления - автоматизированные системы управления технологическими процессами.
Широкое внедрение автоматизации пищевых производств позволяет повысить эффективность технологических процессов и обеспечить полную сохранность натуральных свойств исходного сырья, которое поступает на переработку.
1. Схема и основные характеристики технологической установки

Рисунок 1.1 - Схема хлебопекарной печи
Регулируемые параметры: температура дымовых газов, подаваемых в центральную зону пекарной камеры.
Контролируемые параметры температура, давление газа.
Сушка (высушивание) материалов состоит в удалении влаги из влажных материалов путем ее диффузии из твердого материала и испарения.
Необходимость удаления влаги из материала может быть обусловлена разными причинами, например:
Влажный продукт может портиться при хранении, так как влага вредно воздействует на товарные свойства некоторых материалов: слеживание, смерзание в зимнее время, образование плесени.
2. Составление функциональной схемы автоматизации технологической установки
Функциональная схема автоматизации (ФСА) дает представление о функционально - блочной структуре системы автоматического управления - регулирования, сигнализации, защиты технологического процесса или установки и определяет объем оснащения установки (объекта) аппаратурной автоматики. На ФСА изображены: технологическое оборудование, коммуникации, органы управления и средства автоматизации (датчики, регулирующие и контролирующие приборы, элементы управления, вычислительные устройства и пр.).
В зоне щитов и пультов условно изображают установленные средства автоматизации. От них линии связи идут к элементам схемы установки. Приборы и средства, установленные вне щитов, - местные приборы.
![]()

Рисунок 2 - Функциональная схема автоматизации регулирования и контроля температуры и давления газа
В соответствие с заданием для регулирования и контроля температуры и давления газа в технологической установке на выходе из топки установлен измеритель температуры (поз.4-1), имеющий сдвоенный чувствительный элемент (сдвоенная термопара), один из которых подключен ко вторичному прибору, установленному на щите (поз.4-2), осуществляющий показание и запись температуры, а другой - к электрическому регулятору (поз.4-3), имеющему датчик (поз.4-4), не встроенный в регулятор. Исполнительным механизмом (поз.4-5) можно управлять вручную с помощью кнопок управления (поз.4-5) можно управлять вручную с помощью кнопок управления (поз.3-1) через переключатель режима работы - ручное - автоматическое (поз.3-2). Исполнительный механизм изменяет подачу газа в топку. Для контроля давления на выходе в топку установлен датчик давления (поз.2-1), который подключен ко вторичному прибору на щите (поз.2-2), осуществляющему показание давление газа и имеющему задатчик (поз.2-3) и сигнализацию (поз.2-4) для обеспечения техники безопасности. Измеритель температуры подаваемого газа (поз.1-1) подключен к прибору, установленному на щите (поз.1-2), осуществляющему показания и запись температуры.
3. Построение кривой разгона объекта по каналу регулирования, выбор типа регулятора
Исходные данные для построения кривой разгона объекта по каналу регулирования сведены в таблицу 1.
Таблица 1
| № п/п |
Возмущение Y% Р.О. |
Относительное время кривой разгона tотн |
Показатели качества процесса регулирования |
||||||||||||
| 0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|||||
| данные эксперимента - отклонение параметра Xэ(t) |
X1% |
Xост |
Xр. отн. |
||||||||||||
| 1 |
10 |
0 |
0,25 |
1 |
2,3 |
3,3 |
4,1 |
4,5 |
4,8 |
5,0 |
5,1 |
5,1 |
40 |
10 |
1,5 |
Абсолютное значение времени определяется по формуле:
![]() ,
,
где tпер. - время переходного процесса, указанное для технологической установки.
![]()
Кривую разгона объекта строим в единицах регулируемой величины по формуле:
![]() (t)
(t) ![]()
![]()
где ![]() - отклонение по кривой разгона,
- отклонение по кривой разгона,
![]() - отклонение параметра по таблице 1.
- отклонение параметра по таблице 1.
Результаты пересчета t и X сводим в таблицу 2.
Таблица 2
| Параметр |
Значение |
||||||||||
| tотн |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1 |
| X э (t) |
0 |
0,25 |
1 |
2,3 |
3,3 |
4,1 |
4,5 |
4,8 |
5,0 |
5,1 |
5,1 |
| t(М) |
0 |
2 |
4 |
6 |
8 |
10 |
12 |
14 |
16 |
18 |
20 |
| X(t) |
0 |
0,59 |
2,35 |
5,2 |
7,77 |
9,65 |
10,6 |
11,3 |
11,77 |
12 |
12 |
По данным таблицы строим кривую разгона объекта (рисунок 3).

Рисунок 3 - Кривая разгона
На кривой разгона объекта проводим касательную к точке перегиба и определяем графически динамические и установившиеся параметры объекта:
t=2,5 мин,
Т=10,5 мин,
X¥ = 12.
Затем рассчитываем вспомогательные параметры:
![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
По номограмме ![]() выбираем закон регулирования.
выбираем закон регулирования.
![]()

Рисунок 4 - Номограмма ![]()
Согласно координаты точки (Rg, t/Т) и ближайшей к ней кривой - это П - регулятор.
4. Определение пригодности регулятора и параметров его настроек
После того, как мы выбрали закон регулирования определяем время регулирования tр и остаточное отклонение.
Время регулирования tр определяем по номограмме tр/t=f(t/Т) (рисунок 5).

Рисунок 5 - Номограмма tр/t=f(t/Т)
К оси абсцисс в точке с соответствующим значением t/Т восстанавливаем перпендикуляр до пересечения с графиком П - регулятора. По оси ординат определяем величину "С" отношения tр/t, тогда время регулирования tр определяем по формуле:
![]() ;
;
![]()
Затем проверяем неравенство:
 ;
;
![]()
![]()
Так как. ![]() , следовательно, регулятор выбран верно.
, следовательно, регулятор выбран верно.
По графику
![]()
(рисунок 6) определяем графически остаточное отклонение.
![]()

Рисунок 6 - Номограмма
![]()
X’ост=С’X∞ C'=0,25;
![]()
X’ост< Xост 3<10;
Закон регулирования П - регулятора имеет вид:
![]()
Определяем параметры настроек регулирования по формуле:

![]()
![]() ;
;
5. Анализ АСР на устойчивость по критериям устойчивости Гурвица и Михайлова
|
|
|
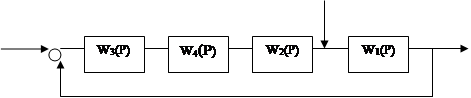
Рисунок 7 - Структурная схема
Структурную схему преобразовываем к одноконтурному виду, заменяя внутренние контуры одним звеном пользуясь правилами коммутации. Передаточные функции структурной схемы записываем в общем виде.
W(P) = W5(P) =W3(P) W4(P) W2(P) W1(P)
Заменяем параметры передаточных функций их числовыми значениями из таблицы 3.
Таблица 3
| Параметры звена |
k1 |
T1 |
t1 |
k01 |
k2 |
T2 |
t2 |
k02 |
k3 |
t3 |
k4 |
T4 |
t4 |
|||||||||||||
| 8 |
1 |
1,2 |
0 |
0,4 |
0 |
0 |
1 |
0,9 |
0 |
0,5 |
0,7 |
0,5 |
||||||||||||||
Формулы передаточных функций имеют вид:
![]()
![]()
![]()
![]()
![]()
![]() ;
; ![]()
![]() ;
; ![]()

Записываем передаточную функцию замкнутой АСР по управлению ![]() и возмущению Фf(P):
и возмущению Фf(P):
![]()
![]()
![]()

5.1 Определение устойчивости системы по критерию Гурвица
Для определения устойчивости системы по Гурвицу приравниваем к 0 знаменатель передаточной функции замкнутой по управнению системы, т.е. получаем характеристическое уравнение замкнутой по управлению системы:
![]()
В общем виде:
![]()
При положительных коэффициентах критерий Гурвица сводится к проверке неравенства:
![]()
![]()
САУ по критерию Гурвица устойчива, так как определитель и диагональный минор величины положительные.
Определяем критический коэффициент усиления замкнутой по управлению системы по формуле:
![]() ;
;
![]()
5.2 Проверка устойчивости САУ по критерию Михайлова
Для проверки САУ по критерию Михайлова в характеристическом уравнении для замкнутой по управлению системы заменяем оператор дифференцирования Р на комплексную переменную jw, полученное комплексное число представляем в алгебраической форме записи:
![]()
![]()
![]()
![]()
Изменяя значение w от 0 до ¥ определяем значение функции и строим график на комплексной плоскости. На первоначальном этапе определяем точки пересечения годографа Михайлова с действительной и мнимой осями.
1) ![]() ;
;
![]() ;
;
![]()
![]() .
.
2) ![]() ;
;
![]() ; или
; или ![]()
![]() или
или ![]()
Изменяя значение w определяем U(w) и V(w), полученные данные сводим в таблицу 4.
Таблица 4.
| w |
0,0 |
0,4 |
0,8 |
1,2 |
1,3 |
1,6 |
2,0 |
2,4 |
| U(w) |
1,440 |
1,168 |
0,352 |
-1,008 |
-1,433 |
-2,912 |
-5,36 |
-8,352 |
| V(w) |
0,000 |
0,765 |
1,299 |
2,410 |
1,292 |
0,755 |
-0,784 |
-3,475 |
| w |
2,8 |
3,2 |
3,6 |
3,9 |
4,0 |
4,4 |
4,8 |
5,2 |
5,6 |
| U(w) |
-11,888 |
-15,968 |
-20,592 |
-24,417 |
-25,76 |
-31,472 |
-37,728 |
-44,528 |
-51,872 |
| V(w) |
-7,549 |
-13,235 |
-20,765 |
-27,76 |
-30,368 |
-42,275 |
-56,717 |
-73,923 |
-94,125 |
По данным таблицы строим годограф, рисунок 8.

Рисунок 8 - Годограф Михайлова
Анализируя годограф Михайлова делаем следующие выводы:
САУ по критерию Михайлова устойчива, так как при показателе степени характеристического уравнения n=3, кривая (годограф), начинаясь на действительной положительной полуоси, огибает начало координат против часовой стрелки, проходя последовательно 3 квадранта.
Определенный по графику коэффициент максимального усиления kmax
![]()
![]() kд + kз
kд + kз
kд - коэффициент усиления, = 1,44
kз - коэффициент запаса, = 4,24
![]()
Сравнения его со значением, определенным по критерию Гурвица, мы видим, что они равны:
![]()
![]()
6. Определение запаса устойчивости АСР по фазе
Для определения запаса устойчивости по фазе воспользуемся критерием Михайлова - Найквиста. Для этого исследуем разомкнутую по управлению систему:
![]()
Выпишем отдельно числитель и разделим его на вещественную и мнимую составляющие, заменив P на jw:
![]()
![]()
![]()
![]()
Амплитудно-частотную характеристику численно найдем по формуле:
![]()
Фазово-частотную характеристику численно найдем по формуле:

Выпишем знаменатель и так же разделим его на вещественную и мнимую части:
![]()
![]()
![]()
![]()
Амплитудно-частотную характеристику определим по формуле:
![]()
Для удобства строим АЧХ и ФЧХ в логарифмических координатах.
Чтобы система была устойчива, необходимо, чтобы логарифмические частотные характеристики разомкнутой системы удовлетворяли следующему требованию: необходимо и достаточно, чтобы при всех частотах, при которых ЛАЧХ положительна, значения фазы не превышали "-π". Иначе говоря, система устойчива, если ЛАЧХ пересечет ось lg(w) раньше, чем ЛФЧХ достигнет значения "-π".
Фазово-частотную характеристику определим по формуле:

![]() ;
;

![]()

Изменяя значение w от 0 до ¥ рассчитываем значение действительной и мнимой составляющих. Затем производим операцию логарифмирования, и результаты вычислений сводим в таблицу 5.
Таблица 5
| w |
1 |
1,25 |
1,5 |
1,75 |
2 |
2,25 |
2,5 |
| lgw |
0 |
0,09691 |
0,176091 |
0,243038 |
0,30103 |
0,352183 |
0,39794 |
| 20lgA(w) |
11,56588868 |
9,357563 |
7,573092 |
6,07112 |
4,770441 |
3,620912 |
2,58966 |
| φ(w) |
0 |
-0,32548 |
-0,58501 |
-0,79662 |
-0,97266 |
-1,12171 |
-1,24986 |
По данным таблицы строим годограф, рисунок 9.

Рисунок 9 - Запас устойчивости по фазе
По графику определяем запас устойчивости по фазе
Δφ = 1,93 рад = 110,5°, следовательно, система имеет высокий запас устойчивости.
Заключение
В пищевой промышленности чаще всего необходимо измерять, контролировать и регулировать следующие технологические параметры: температуру, давление (разряжение), влажность, уровни рабочих сред в аппаратах и машинах, показатели качества и состава сырья, полуфабрикатов и готового продукта.
При внедрении автоматизации технологического процесса обеспечивается рост производства, повышение качества продукции и производительности труда.
В процессе выполнения курсового проекта мы ознакомились с устройством и основными характеристиками хлебопекарной печи. Составили функциональную схему автоматизации, построили кривую разгона по каналу регулирования, выбрали тип регулятора - П - регулятор, определили пригодность регулятора и записали закон регулирования:
![]() .
.
Проанализировали автоматизированную систему регулирования по критериям Гурвица и Михайлова и сделали вывод:
По критерию Михайлова система устойчива, так как при показателе степени характеристического уравнения n=3, кривая, начинаясь на положительной действительной полуоси, огибает начало координат против часовой стрелки и проходит последовательно 3 квадрата;
Коэффициенты усиления k max определенный по графику и найденный по критерию Гурвица равны
![]()
При использовании критерия Михайлова - Найквиста рассчитали запас устойчивости по фазе. Δφ = 1,93 рад = 110,5°.
Литература
1. Иващенко Н.Н. Автоматическое регулирование. Теория и элементы систем: Учебник для ВУЗов. М.: Машиностроение. - 1978 - 736 с.
Симонов В.П. Задания и методические указания на курсовую работу по УТС. Орел: ОрелГТУ, 1999 - 22 с.
3. Качанов А.Н. Математические основы проектирования и наладки систем автоматического управления техническими объектами и процессами. Орел: ОрелГТУ, 2001 - 143 с.
4. Автоматика и автоматизация пищевых продуктов: Учебник для ВУЗов. М.: "ВО Агропромиздат", 1991 - 239 с.
5. Малахов Н.Н. Процессы и аппараты пищевых производств. Орел: ОрелГТУ, 2001 - 686 с.