| Скачать .docx |
Реферат: Основные принципы магнитного резонанса
Реферат
на тему:
"Основные принципы магнитного резонанса"
Донецк 2008
Введение
Движение отдельных частиц, в частности молекул, как правило, наиболее полно можно описать на языке квантовой механики - абстрактной математической теории, в которой все процессы, происходящие в природе, выражаются с помощью операторов физических величин. При этом сами операторы не дают наглядной физической картины, а конкретный физический смысл приобретают только средние значения или математические ожидания операторов, т.е. значения физических величин, получаемые в результате достаточно большого числа измерений. Расчет математических ожиданий, обычно обозначаемых парой угловых скобок, проводится согласно данной теории. Например, энергия Е определяется как математическое ожидание гамильтониана Н системы: Е = < Н >. Заметим, что во многих случаях имеет место формальное совпадение операторных уравнений с соответствующими уравнениями для математических ожиданий, хотя их смысл, вообще говоря, различный. Здесь, как правило, будем рассматривать математические ожидания физических величин, поэтому там, где не возникает недоразумений, скобки, обозначающие математические ожидания, для краткости будем опускать.
Основные принципы магнитного резонанса можно понять в рамках классической физики при условии, что введены дополнительные предположения, отражающие квантовомеханические свойства системы, поэтому далее для описания резонансных явлений часто используется квазиклассическое приближение, благодаря его наглядности и простоте.
1.1 Магнитный момент и ядерный спин
Большинство атомных ядер обладает собственным механическим моментом вращения J, пропорциональным величине I, называемой ядерным спином: J = hI, где J и I - операторы,![]() , h - постоянная Планка. Ядра, обладающие собственным механическим моментом, можно рассматривать как микроскопические гироскопы. С вращательным моментом связан ди-польный магнитный момент
, h - постоянная Планка. Ядра, обладающие собственным механическим моментом, можно рассматривать как микроскопические гироскопы. С вращательным моментом связан ди-польный магнитный момент![]() , причем между механическим и магнитным моментом существует простая связь
, причем между механическим и магнитным моментом существует простая связь
![]()
Коэффициент пропорциональности У/ называется гиромагнитным отношением. Эта величина является константой для каждого типа ядер. Величина спина I постоянна для каждого ядра, точнее, для каждого ядра в основном состоянии. В физике высоких энергий наблюдаются возбужденные состояния ядер, в которых значения вращательного момента ядер отличаются от их значений в основном состоянии. Согласно квантовой механике, величина ядерного спина I характеризуется максимальным собственным значением оператора 1г — проекции оператора спина I на ось z произвольной декартовой системы координат. Число I называют спином ядра. Собственные чиста rrijоператора 1Ъ могут принимать значений: irij= /, 7—1,где7 > 0 может быть либо целым числом, либо полуцелым. Исходя из квантовомеханических положений можно вычислить модуль момента J:
![]()
Чем больше величины Yjи I, тем больше магнитный момент атомного ядра, а значит, величина магнитного поля, создаваемого этим микроскопически малым магнитом.
Среди стабильных изотопов ядро атома водорода *Н обладает наибольшим значением гиромагнитного отношения. Так как чувствительность метода возрастает с ростом магнитного момента и большинство биологических объектов состоит из соединений, в состав которых входят атомы водорода, то спектры ЯМР на ядрах *Н имеют особое значение в биологии и медицине. Такие распространенные изотопы, как 1б О и 12 С, обладают нулевым ядерным спином, и они не могут быть обнаружены с помощью метода ЯМР.
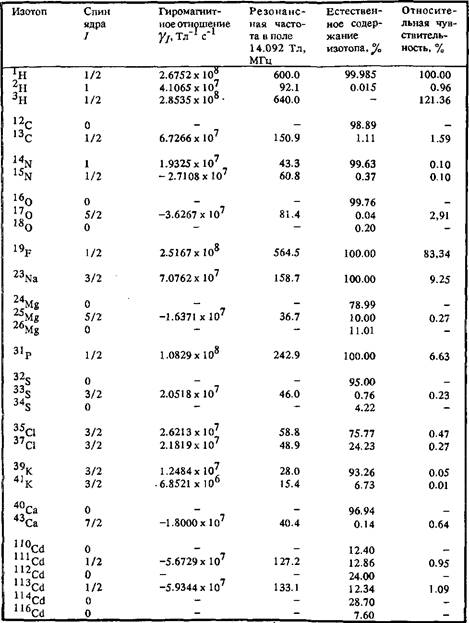
Среди ядер, представляющих интерес для биологии и медицины и обладающих спином /= 1/2, наряду с *Н можно назвать ядра 31 Р, 13 С и 15 N. Однако естественное содержание изотопа 13 С составляет лишь 1% по отношению к изотопу 12 С^спин которого 1= 0, а изотопа 15 N - всего лишь 0,4%. Ядра изотопов NhNa, спин которых I >1, могут обладать электрическим квадрупольным моментом, их применение в спектроскопии ЯМР весьма ограничено. Основные свойства ядер, представляющих интерес для биологии и медицины, приведены в табл. 1.1.
Таблица 1.1. Свойства основных магнитноактивных ядер
1.1.2 Условие резонанса
В чем состоит явление ЯМР? Если наблюдать движение волчка в поле тяжести Земли, то под влиянием этого поля ось волчка совершает вращение вокруг направления поля тяжести. Такое движение называют прецессией. Частота этого вращения зависит от величины поля тяжести, т.е. если представить себе, что это вращение происходит не на Земле, а на Луне, то частота прецессии будет в шесть раз меньше, чем на Земле. Подобное наблюдается и для магнитного диполя, например, для атомного ядра со спином I, магнитным моментом![]() и гиромагнитным отношением
и гиромагнитным отношением![]() , помещенного в магнитное поле Во! вектор
, помещенного в магнитное поле Во! вектор![]() совершает прецессию с угловой частотой
совершает прецессию с угловой частотой![]() . Эта частота тем больше, чем больше гиромагнитное отношение yiи внешнее магнитное поле Во, а именно:
. Эта частота тем больше, чем больше гиромагнитное отношение yiи внешнее магнитное поле Во, а именно:![]()
Если же на ядерный спин I кроме статического магнитного поля Во воздействует еще и переменное магнитное поле Bi, перпендикулярное полю Во, то в системе может наступить резонанс. Это происходит в случае, когда частота![]() этого переменного поля равна частоте прецессии
этого переменного поля равна частоте прецессии![]() магнитных моментов ядер. В результате наблюдаем в системе очень сильное взаимодействие, даже если переменное поле В/ мало.
магнитных моментов ядер. В результате наблюдаем в системе очень сильное взаимодействие, даже если переменное поле В/ мало.
Резонансный эффект - явление, широко распространенное в окружающем мире. Например, маятник можно раскачать до очень большой амплитуды, если оказывать воздействие на него в определенной точке "фазы качания".
Простая математическая формула
![]()
выражающая условие резонанса, является основным уравнением ЯМР.
Рассмотрим явление ЯМР с точки зрения квантовой механики. Большое число малых магнитных диполей, связанных с ядрами атомов, в отсутствие магнитного поля полностью разупорядочены, т.е. ориентация их статистически равновероятна. Если к этой системе ядерных спинов приложить постоянное магнитное поле, то эти элементарные магнитики будут ориентироваться относительно направления постоянного магнитного поля. Согласно фундаментальному физическому закону, открытому Штерном и ГерЛахом в 1923 г., такие частицы со спином 7=1/2 будут располагаться относительно магнитного поля не произвольным образом, а либо вдоль, либо против поля, т.е. магнитное квантовое число от/, характеризующее эту ориентацию, будет равным либо +1/2, либо -1/2. Этот процесс называется квантованием.
Обычно в ЯМР положение системы координат выбирают таким образом, что направление внешнего магнитного поля В0 совпадает с направлением оси z. Математическое ожидание z-компоненты hоператора спина I равно
![]()
Энергия Е„, магнитного диполя JUво внешнем магнитном поле В0 в этом случае дается выражением
![]()
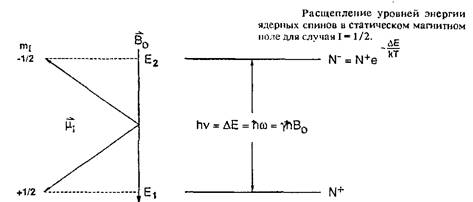
При этом/г выражается через I согласно уравнению. Для частиц со спином /= 1/2, помещенных во внешнее магнитное поле, существуют два уровня с энергиями Ej и Ег:
![]()
![]()
Как и в любом виде спектроскопии, переходы между уровнями энергии могут быть индуцированы в том случае, если энергия электромагнитных квантов![]() равна разности энергий
равна разности энергий![]() , и частоты радиочастотного поля В\ удовлетворяют условию
, и частоты радиочастотного поля В\ удовлетворяют условию
![]()
Деление на Й дает основное уравнение ЯМР, выведенное исходя из интуитивных соображений.
1.1.3 Уравнение Блоха
Число атомных ядер в макроскопическом образце весьма велико. В кубическом сантиметре воды содержится 1022 ядер атомов водорода, причем микроскопические магнитные диполи этих ядер полностью разупорядочены. Проведем мысленно следующий эксперимент: включим на короткое время статическое магнитное поле В0 ; в этом случае спины ядер Н с / = 1/2 статистически распределятся относительно направления поля В0 , так что
одна половина их ориентируется вдоль поля, а вторая - против. Однако при этом спиновая система не находится в состоянии теплового равновесия с окружением. Обозначим через N+ число спинов I, z-компонента которых Iz ориентирована вдоль поля В0 , а через N — число спинов, ориентированных против поля, и учтем, что в состоянии теплового равновесия с окружающей средой отношение N~ к N+ подчиняется соотношению Больцмана
![]()
где к - постоянная Больцмана, Г - температура.
В этом случае уровень с меньшей энергией населен больше и, следовательно, большая часть спинов ориентирована так, что их магнитные моменты направлены вдоль магнитного поля В0 . При комнатной температуре в полях порядка 1 Тл относительная разность населенностей всего лишь порядка 10~6 . Однако эта небольшая величина, приводящая к Т0М У> что спинов, ориентированных по полю, в 1 см вещества примерно на 10 больше, чем против, позволяет провести измерение макроскопической намагниченности.
В состоянии термодинамического равновесия результирующая макроскопическая намагниченность М направлена вдоль внешнего магнитного поля В0 . Величина намагниченности М0 для комнатных температур может быть получена из следующего уравнения:
![]()
где N = N+ + N~ - полное число ядерных спинов, находящихся в единице объема. Из формулы видно, что макроскопическая намагниченность возрастает с увеличением напряженности магнитного поля В0 и гиромагнитного отношения у/ и убывает с ростом температуры Т. Такое поведение намагниченности М определяет большое число эффектов, наблюдаемых в ЯМР.
Время установления теплового равновесия между спиновой системой и окружающей средой, которую даже в жидкостях принято называть решеткой, определяется как время спин-решеточной релаксации. Эта величина описывает процесс установления равновесия, т.е. приближение z-компонен-ты намагниченности Mz к равновесному значению М0 , которое устанавливается в спиновой системе спустя длительный период времени. Равновесная намагниченность устанавливается параллельно внешнему магнитному полю В0 , поэтому спин-решеточную релаксацию называют также продольной релаксацией.
Непосредственно после открытия явления ЯМР Феликс Блох на основе классического подхода описал поведение намагниченности М, которая характеризуется компонентами Мх , Му и Mz , с помощью системы дифференциальных уравнений. Эти уравнения называются уравнениями Блоха.
Уравнения Блоха позволяют достаточно просто описать основные экспериментальные данные: 1) Если направления намагниченности и магнитного поля в исходный момент не совпадают, то намагниченность совершает прецессию относительно направления магнитного поля. 2) Спустя достаточно длительный промежуток времени после воздействия возбуждения в системе устанавливается равновесная намагниченность, компонента Мг которой вдоль направления магнитного поля равна М0 , а поперечная компонента намагниченности, перпендикулярная направлению внешнего магнитного поля, равна нулю. Экспоненциальное приближениеMz к равновесному значению М0 описывается уравнением
![]()
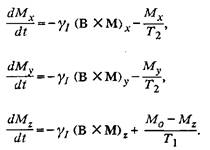
Постоянная Tj называется временем продольной релаксации. Соответственно процесс распада поперечной намагниченности описывается уравнениями для Мх и Му :
![]()
Классическое уравнение движения, описывающее прецессию намагниченности в магнитном поле без учета релаксации, имеет вид
![]()
Уравнения Блоха получаются путем феноменологического введения в уравнение релаксационных слагаемых в форме правых частей уравнений и:
В типичном ЯМР эксперименте наряду со статическим магнитным полем В0 , направленным вдоль оси z, имеется еще и переменное РЧ поле с частотой О), магнитная составляющая которого направлена перпендикулярно полю В0 , например, вдоль оси х, и осциллирует с частотой V = t, как правило, много меньше внешнего магнитного поля В0 . Линейно поляризованное переменное магнитное поле можно представить в виде разложения по двум компонентам, которые вращаются в противоположных направлениях с круговыми частотами ±, частота вращения которой относительно оси z равна Шг Соответствующим преобразованием координат можно не только формально упростить уравнения, но и преобразовать их так, что они приобретут более наглядный вид. Сложное движение вектора намагниченности в пространстве можно разложить на два движения: движение во вращающейся системе координат и одновременное движение этой системы координат относительно лабораторной системы координат, фиксированной в пространстве. Обычно частоту вращения выбирают равной частоте РЧ поля, 0)г = О), так как в этом случае поле В; во вращающейся системе координат будет неподвижным. Обозначим когерентную компоненту намагниченности вдоль оси х через М х ', а сдвинутую на 90° вдоль оси у' - через М ':
![]()
Уравнения Блоха во вращающейся системе координат принимают следующий вид:
![]()
![]()
где![]() определена формулой.
определена формулой.
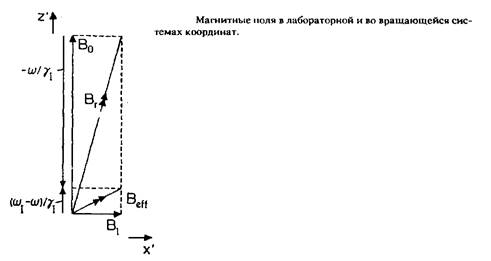
С помощью рис. 1.3 попытаемся построить простое представление о процессах, происходящих во вращающейся системе координат. Так как система координат вращается с круговой частотой![]() равной частоте поля Bi, то поле Bi будет неподвижным в этой системе координат. При этом удобно кроме суммарного поля Вг
, складывающегося из полей В0
и Bi, определить еще и эффективное поле Be
ff, которое является векторной суммой полей к
равной частоте поля Bi, то поле Bi будет неподвижным в этой системе координат. При этом удобно кроме суммарного поля Вг
, складывающегося из полей В0
и Bi, определить еще и эффективное поле Be
ff, которое является векторной суммой полей к![]() . Можно показать, что уравнения, описывающие затухающее движение и прецессию спинов в этом эффективном магнитном поле, имеют вид -<1.16). Особенно простым будет вид этих уравнений, если
. Можно показать, что уравнения, описывающие затухающее движение и прецессию спинов в этом эффективном магнитном поле, имеют вид -<1.16). Особенно простым будет вид этих уравнений, если![]() и эффективное поле Be
ff равно полю i ' В\. В этом случае частота прецессии со/ формально удовлетворяет условию резонанса, в котором вместо В0
используется Bi:
и эффективное поле Be
ff равно полю i ' В\. В этом случае частота прецессии со/ формально удовлетворяет условию резонанса, в котором вместо В0
используется Bi:
![]()
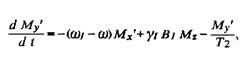
Если вначале вектор намагниченности направить вдоль оси z, и включить кратковременно РЧ поле, например, на время /, то вектор намагниченности отклонится на некоторый угол в направлении оси у ' в плоскости у ' z, а затем вновь возвратится к оси z. Если ВЧ поле отключается в момент времени, когда вектор намагниченности расположится строго вдоль оси у ', то говорят, что на систему воздействует 90°-ный или![]() -импульс. Если при той же напряженности магнитного поля выбрать длительность РЧ импульса такую, что вектор намагниченности отклонится от оси zв плоскости у ' z на 180°, то такой импульс называется 180°-ным или
-импульс. Если при той же напряженности магнитного поля выбрать длительность РЧ импульса такую, что вектор намагниченности отклонится от оси zв плоскости у ' z на 180°, то такой импульс называется 180°-ным или![]() -импульсом. В общем случае путем соответствующего выбора Be
ff и длительности импульса можно развернуть вектор намагниченности в плоскости у' z в произвольном направлении.
-импульсом. В общем случае путем соответствующего выбора Be
ff и длительности импульса можно развернуть вектор намагниченности в плоскости у' z в произвольном направлении.
Если под действием РЧ импульса намагниченность отклонится от оси z, то после выключения РЧ импульса намагниченность, в результате появления у нее поперечных компонент, начнет прецессировать вокруг направления поля В0 . Прецессия намагниченности создает модуляцию во времени связанного с этой намагниченностью магнитного поля. Если мы поместим образец в приемную катушку, то изменяющееся во времени магнитное поле создаст малое индукционное напряжение, которое может быть зарегистрировано с помощью соответствующих методов. Амплитуда этого сигнала пропорциональна резонансной частоте со/ и намагниченности м0 ; затухание сигнала во времени называют спадом свободной индукции.
1.1.4 Спин-решеточная релаксация
Изменение во времени намагниченности мг может быть описано уравнениями Блоха. Решением этих уравнений для мъ является экспоненциальная функция с характерным временем Tlt которое называется временем продольной или спин-решеточной релаксации:
![]()
Если после воздействия радиочастотного импульса спиновая система свободно эволюционирует, то она стремится к состоянию больцмановского равновесия. В частности, после воздействия 180°-ного импульса, приводящего к равенству Mz = -Mo, поведение намагниченности Mz описывается экспоненциальной функцией, которая при t = 1п2 • Т\ = 0,69 • Т\ обращается в нуль, и это обстоятельство можно использовать для определения значения Т\ так называемым нуль-методом.

При использовании обычного способа регистрации намагниченность —Mz
, направленная после воздействия 180°-ного импульса вдоль оси —z, дает такой же малоинтенсивный сигнал, как и +MZ
, ввиду того, что он не сопровождается возникновением отличного от равновесного значения поперечной намагниченности в плоскости ху. Для определения времени продольной релаксации необходимо сначала с помощью L 80°-ного импульса изменить равновесную ориентацию вектора намагниченности вдоль оси +z на противоположную, ориентировав ее вдоль оси —z, а затем, спустя некоторое время задержки![]() , провести измерение значения
, провести измерение значения![]() , которое устанавливается за счет продольной релаксации. Измерение
, которое устанавливается за счет продольной релаксации. Измерение![]() можно провести после воздействия на систему 90°-ного импульса, который преобразует z-намагниченность в поперечную, что дает возможность зарегистрировать сигнал свободной индукции, пропорциональный
можно провести после воздействия на систему 90°-ного импульса, который преобразует z-намагниченность в поперечную, что дает возможность зарегистрировать сигнал свободной индукции, пропорциональный![]() . Так как сначала намагниченность инвертируется, а затем наблюдается восстановление ее равновесного значения, то этот метод называют методом инверсии-восстановления и обозначают следующим образом:
. Так как сначала намагниченность инвертируется, а затем наблюдается восстановление ее равновесного значения, то этот метод называют методом инверсии-восстановления и обозначают следующим образом:![]()
1.1.5 Распад поперечной намагниченности и спйн-спиновая релаксация
Второй тип релаксации, с которым нам предстоит познакомиться, это поперечная релаксация. С этим механизмом релаксации теснейшим образомсвязана ширина линии ЯМР - параметр, характеризующий разрешающую способность спектров высокого разрешения. Кроме того, различие времен поперечной релаксации для каждого типа тканей очень важно для разрешения по контрасту изображений в ЯМР-томографии.

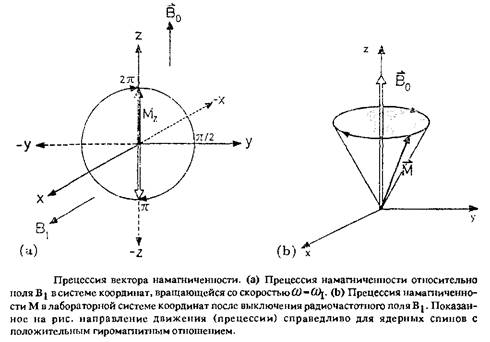
Если воздействовать на равновесную спиновую систему не 180°-ным импульсом, а 90°-ным, то вектор намагниченности отклонится на угол 90° и расположится вдоль оси у '. Затем намагниченность свободно эволюционирует, вращаясь с частотой Щ вокруг направления магнитного поля В0 ; эта составляющая намагниченности обозначается Мху . Так как поле В0 не является строго однородным по объему образца, то не все спины, образующие суммарную намагниченность Мху , вращаются в плоскости х У с одной и той же скоростью: одни из них вращаются с несколько меньшей, а другие - с несколько большей средней скоростью. Изменение проекции вектора намагниченности во времени показано на рис. 1.6. Намагниченность Мху распадается при этом в плоскости х'У так, что проекция вектора намагниченности в этой плоскости принимает все возможные значения, а средняя амплитуда поперечной намагниченности и соответственно сигнал в приемной катушке обращаются в нуль. Обычно группу сигналов, которые характеризуются одинаковой скоростью вращения, называют спиновым пакетом. Если, спустя время 7, на спиновую систему воздействует 180°-ный импульс, то все спиновые пакеты изменяют свое положение таким образом, что самые "медленно движущиеся" пакеты оказываются впереди, а самые "быстро движущиеся" - позади. Это подобно бегу группы бегунов на длинные дистанции, движущихся по гаревой дорожке при условии, что все они стартуют одновременно. Спустя некоторое время бегуны распределяются вдоль дорожки таким образом, что бегущие с большой скоростью оказываются более удаленными от исходной точки, чем бегущие с меньшей скоростью. После команды "кругом" бегущие с большей скоростью оказываются позади, и, если в дальнейшем они будут двигаться с прежней скоростью, то достигнут исходной точки одновременно с бегунами, движущимися с меньшей скоростью. Совершенно аналогично вели бы себя спиновые пакеты, движущиеся с различными скоростями, если бы направление внешнего магнитного поля мгновенно изменилось. Отметим, однако, что такое мгновенное изменение направления поля технически достаточно сложно осуществимо. Подобный эффект достигается под действием 180°-ного импульса в момент времени x после 90°-ного импульса, когда положение спиновых пакетов изменится таким образом, что спустя время 27 после воздействия 90°-ного импульса или 7 после 180°-ного более быстрые спины догонят спины, движущиеся более медленно, т.е. все спиновые пакеты будут иметь одинаковую фазу прецессии. Таким образом в плоскости х'У вновь образуется результирующая намагниченность, которая формирует сигнал, названный по имени открывшего этот эффект Эр-вина Хана эхом Хана или спиновым эхом. Результирующее эхо имеет знак, противоположный знаку спада свободной индукции, образовавшегося после воздействия 90°-ного импульса, т.е. сигнал эха сдвинут на 180° относительно сигнала, полученного после преобразования спада свободной индукции. Этого можно избежать, сдвинув фазу 180°-ного импульса на 90°. Для этого в системе координат, движущейся со скоростью. Так как эта дефазировка вызвана спин-спиновым взаимодействием, то характерное время Тг, описывающее этот процесс, называется временем спин-спиновой или поперечной релаксации. В эксперименте спинового эха спин-спиновое взаимодействие приводит к уменьшению амплитуды эха, зависящему от избранного интервала времени x между 90°-ным и 180°-ным импульсами, причем это уменьшение описывается экспоненциальной функцией с характерным временем Т2- Измерение амплитуды эха как функции интервала между 90°-ным и 180°-ным импульсами дает возможность определять Тг в неоднородных магнитных полях.
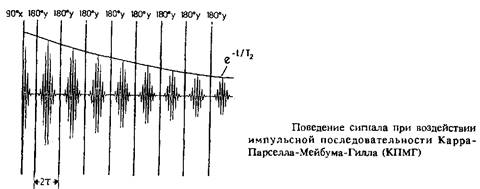
Следует отметить, что определение значений Тг с помощью этого метода является достаточно трудоемкой задачей, поскольку при проведении экспериментов приходится снимать множество спектров для различных значений x. Для усовершенствования метода проведения измерений была разработана другая импульсная последовательность - последовательность Карра-Парселла -, которая в дальнейшем была улучшена Мейбумом и Гиллом. После 90°-ного импульса на спиновую систему воздействует серия 180°-ных импульсов, между которыми всякий раз проводится измерение амплитуды спинового эха. Основным преимуществом импульсной последовательности спинового эха Карра-Парселла-Мейбума-Гилла является то, что полное измерение Тг может быть проведено с помощью одной импульсной последовательности. Кроме того, этот метод позволяет проводить более точное измерение Т2, так как при использовании простой импульсной последовательности спинового эха процессы диффузии могут оказывать существенное влияние на точность измерений. В настоящее время последовательность Карра-Парселла-Мейбума-Гилла приобретает особое значение для ЯМР-томографии.