| Скачать .docx |
Реферат: Соотношения неопределённостей Гейзенберга
Соотношения неопределенностей в операторной форме
Содержание: Сопряжённые динамических переменных ([импульс-координата]; [энергия-время]; [момент импульса-угол поворота]). Квант действия. Принцип исключения в операторной форме, определяющий возможность совместного измерения динамических переменных.
Принцип неопределённости и его операторные выражения.
7.2. Поставим фундаментальный вопрос: «Зависит ли результат измерения от организации самой процедуры измерения? Можно ли сконструировать универсальные приборы для совместного измерения любых величин?» Если ответ положительный, то последовательность измерений любой пары физических величин не играет роли, и процедуры их измерения можно выполнять в любом порядке. Если же ответ отрицательный, следует ожидать, что изменяя порядок измерений, можно получить и иной результат. Исследуем эту ситуацию.
Предстоит решить очень важную проблему, связанную с возможностью совместного измерения различных динамических переменных. Для этого рассмотрим две динамические характеристики. Им соответствуют эрмитовы операторы ![]() и
и ![]() , независимо преобразующие волновую функцию. В простейшем случае совместное измерение величин является комбинацией из двух последовательно выполняемых элементарных процедур. Как это выглядит математически?
, независимо преобразующие волновую функцию. В простейшем случае совместное измерение величин является комбинацией из двух последовательно выполняемых элементарных процедур. Как это выглядит математически?
Первичному измерению величины отвечает преобразование вида A = ![]() . После дующее вслед за величиной измерение величины порождает вторичное преобразование вида B=
. После дующее вслед за величиной измерение величины порождает вторичное преобразование вида B=![]() A =
A = ![]() . В целом последовательности двух измерений отвечает цепочка из двух преобразований волновой функции в виде операторного уравнения вида:
. В целом последовательности двух измерений отвечает цепочка из двух преобразований волновой функции в виде операторного уравнения вида:
B = ![]() .
.
7.2.3. Меняя порядок измерения величин, следует в общем случае ожидать и иного результата. Если первой измерена величина , а второй величина то первое измерение отображается преобразованием C = ![]() , а второе измерение уже D=
, а второе измерение уже D=![]() C =
C = ![]() , так что
, так что
D = ![]() .
.
Две эти разные последовательности измерений двух величин порождают два конечных результата B и D. В общем случае они могут не совпадать, но не исключён и нулевой результат. Составим их разность, и соберём все операторы слева от символа преобразуемой волновой функции, используя свойство ассоциативности эрмитовых операторов:
![]() =
= ![]() .
.
Оператор ![]() называется коммутатором (по-русски «перестановщик»).
называется коммутатором (по-русски «перестановщик»).
7.2.4. Мы подготовились к очень важным заключениям, а именно:
а) если итог двух последовательных измерений независим от порядка их осуществления, то коммутатор должен быть нулевым:
![]() , т.е.
, т.е.
![]()
![]()
![]() .
.
Компактно это выглядит как: ![]() .
.
б) если итог двух последовательных измерений всё же зависит от порядка их выполнения, то ![]() , т.е.
, т.е.
![]()
![]()
![]() .
.
Коммутатор здесь не равен нулю: ![]() .
.
7.2.5.1. При нулевом коммутаторе ![]() порядок измерений не влияет на получаемую количественную информацию, и обе величины и могут быть измерены совместно (в одном едином общем эксперименте с помощью единого прибора).
порядок измерений не влияет на получаемую количественную информацию, и обе величины и могут быть измерены совместно (в одном едином общем эксперименте с помощью единого прибора).
7.2.5.2. Если коммутатор ![]() ненулевой, то получаемая информация зависит от последовательности измерений, и величины и в одном приборе в принципе совместно не могут быть измерены.
ненулевой, то получаемая информация зависит от последовательности измерений, и величины и в одном приборе в принципе совместно не могут быть измерены.
Что же имеет место в природе на самом деле? Попробуем получить ответ.
7.3.Соотношения неопределённостей Гейзенберга.
7.3.1. Накоплена достаточная информация, чтобы решить одну из важнейших проблем квантовой механики, связанную с совместными измерениями динамических переменных.
Исследуем, можно ли измерить:
- импульс частицы, находящейся в определённой точке пространства;
- момент импульса вращающейся частицы в определённой точке орбиты;
- энергию системы в конкретный момент времени.
7.3.2. Выбор этих пар динамических переменных не случаен. Эти пары величин взаимно дополняют друг друга таким образом, что их произведение обладает размерностью циклической константы Планка ![]() , так что
, так что ![]() .
.
Размерность величины ![]() является произведением размерностей энергии и времени или импульса и расстояния. Физическую величину с такой размерностью принято называть действием. В силу этого-то константу Планка часто называют квантом действия.
является произведением размерностей энергии и времени или импульса и расстояния. Физическую величину с такой размерностью принято называть действием. В силу этого-то константу Планка часто называют квантом действия.
7.3.3. Образуем три коммутатора ![]() ,
, ![]() ,
, ![]() , необходимых для исследования этих трёх ситуаций согласно выводам предыдущих параграфов. Сразу же запишем выражения и для комплексно сопряжённых операторов.
, необходимых для исследования этих трёх ситуаций согласно выводам предыдущих параграфов. Сразу же запишем выражения и для комплексно сопряжённых операторов.
7.3.4. Первый коммутатор построим из оператора компоненты импульса и соответствующей ему координаты:

7.3.5. Второй коммутатор построим аналогично из оператора момента импульса и ему соответствующей координаты - угла поворота плоского ротатора:
 .
.
7.3.6. Также и третий коммутатор построим из оператора энергии и времени. Зависящий от времени гамильтониан заимствуем из временного уравнения Шрёдингера:
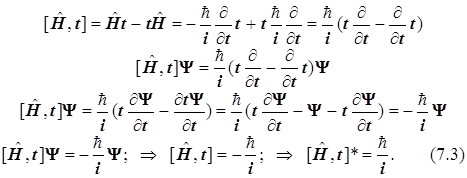
Перед Вами наиболее последовательный операторный вывод соотношений неопределённостей Гейзенберга. Они относятся к числу фундаментальных законов природы.
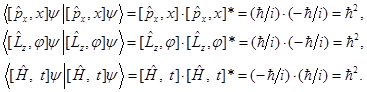
7.3.7. Все три коммутатора не равны нулю, и их численные значения мнимые и равны либо![]() , либо -
, либо -![]() . Вместо мнимых значений удобно построить на их основе действительные квадраты модулей. Для этого каждое из полученных мнимых значений умножается на комплексно сопряжённую величину. Полагая волновую функцию нормированной, для компоненты импульса и соответствующей координаты получаем равенства:
. Вместо мнимых значений удобно построить на их основе действительные квадраты модулей. Для этого каждое из полученных мнимых значений умножается на комплексно сопряжённую величину. Полагая волновую функцию нормированной, для компоненты импульса и соответствующей координаты получаем равенства:

Квадрат модуля каждого из трёх коммутаторов один и тот же. Во всех случаях получается ![]() . Во всех случаях получается квадрат циклической константы Планка
. Во всех случаях получается квадрат циклической константы Планка![]() :
:
 (7.4)
(7.4)
7.3.8. Это значение получено наиболее строго и представляет собою среднеквадратичный разброс, теоретически предопределённый для любого эксперимента, нацеленного на совместное измерение пар динамических переменных.
Разброс порядка величины константы Планка ![]() для явлений микромира очень велик - настолько велик, что совместные количественные измерения динамических переменных с таким коммутатором лишены физического содержания.
для явлений микромира очень велик - настолько велик, что совместные количественные измерения динамических переменных с таким коммутатором лишены физического содержания.
Так в определённой точке линейной траектории невозможно точно указать величину импульса системы, и, напротив, при точно фиксированном импульсе системы невозможно указать её точное положение.
В определённой точке траектории криволинейного движения невозможно указать вектор момента импульса, но если момент импульса фиксирован, то нельзя указать положение тела на криволинейной траектории.
В точно определённый момент времени невозможно указать энергию движущегося тела, и напротив, точное определение энергии тела не может быть привязано к определённому моменту времени в эволюции системы.
7.3.9. В некоторых задачах квантовой механики гамильтониан удаётся выразить через вышеприведённые коммутаторы, а их можно заменить просто мнимым числом. В подобных задачах удаётся отыскать правила квантования энергии наиболее просто, и с такими случаями нам придётся познакомиться позднее.
В элементарной квантовой теории их представлют также в виде произведений предельных ошибок, неизбежных при совместных измерениях, а именно:
![]()
или как произведение неизбежных среднеквадратичных отклонений:
![]()
Читатель, видимо, понял, что форма представления соотношений Гейзенберга определяется лишь способом вычисления погрешностей, но суть их всюду одна и та же.
Корпускулярно-волновая природа микромира не допускает чрезмерно упрощённых представлений о локализованных системах, «воткнутых, втиснутых» в материальные точки.
Мир на самом деле состоит из элементов в достаточной мере делокализованных, хотя они и ничтожно малы по нашим меркам. Первичное ощущение «твердокаменности» той или иной системы и проистекающее отсюда её восприятие могут быть обманчивы, и лишь строгий анализ фактов исключает заблуждения и ошибки.
Но тем, кто всё же решил, что принцип Гейзенберга разрешает ошибаться, заметим, что это мнимое право люди (особенно в той или иной мере причастные к власти) присваивают и эксплуатируют куда чаще, чем допускают законы природы (да и законы общества тоже!), и напомним крылатую фразу знаменитого пройдохи и циника Талейрана: «...Это не преступление! Это гораздо хуже! Это же ошибка!».
При описании механических движений в системе частиц с номерами: {1,2, 3,...
n
}
могут быть использованы различные пространственные переменные (прямоугольные-декартовы, косоугольные, полярные (шаровые, цилиндрические или эллиптические). Их полная совокупность, достаточная для составления исчерпывающих уравнений механики в конкретной задаче, называется конфигурационным пространствомK
. Координаты могут быть декартовы {
x
1
,
y
1
,
z
1
,
x
2
,
y
2
,
z
2
,
x
3
,
y
3
,
z
3
, ...
xn
,
yn
,
zn
},
или полярные, например, шаровые {
r
1
,
J
1
,
j
1
,
r
2
,
J
2
,
j
2
,
r
3
,
J
3
,
j
3
, ...
rn
,
J
n
,
j
n
},
или любые другие - в общем виде: ![]() Максимальная размерность конфигурационного пространства K
равна 3
n
- утроенному числу частиц в системе. Принадлежность переменных к конфигурационному пространству можно указать с помощью символов - кванторов включения, например, в виде:
Максимальная размерность конфигурационного пространства K
равна 3
n
- утроенному числу частиц в системе. Принадлежность переменных к конфигурационному пространству можно указать с помощью символов - кванторов включения, например, в виде: ![]() .
.
Постулат 1. Волновая функция и её свойства (конечность, однозначность, непрерывность и нормировка)
Формулировка:
Всякое состояние квантово-механической системы описывается функцией состояния - волновой функцией, заданной на многообразии всех переменных конфигурационного пространства системы, и также времени:
![]()
Волновые функции обязаны удовлетворять нескольким математическим требованиям. Они должны быть: 1) конечны, 2) однозначны, 3) непрерывны, 4) нормированны, т.е.: ![]() ;(5.1)
;(5.1)
Область интегрирования охватывает весь возможный диапазон значений каждой переменной во всём пространстве K . Вероятностный смысл волновой функции:
![]()
![]()
![]()
![]() (5.2)
(5.2)
Нормировка оказывается условием суммирования плотности вероятности во всём конфигурационном пространстве. Квадрат модуля волновой функции является плотностью вероятности, с которой физическая система, пребывая в том физическом состоянии, которое описывается волновой функцией Y, распределена по конфигурационному пространству. Функции, отвечающие условиям 1, 2, 3 называются регулярными.
Волновая функция это математический образ квантово-механического состояния физической системы. Конечно же, это функция механического состояния системы.
Постулат 2. Измерения физических величин и операторные уравнения на собственные значения эрмитовых операторов
Формулировка:
Разрешёнными значениями динамической переменной являются те, что являются собственными значениями эрмитова оператора данной динамической переменной:
![]() (5.3)
(5.3)
Операторные уравнения являются математическими образами измерений. Операторы удобно рассматривать в качестве образов макроскопических приборов. Выражения для операторов основных динамических переменных. Оператор импульса и его rомпоненты (из формулы бегущей волны де Бройля). Операторы координат и оператор потенциальной энергии совпадают с самими этими переменными. Взаимосвязь операторов различных динамических переменных определяется тем, что они отображают макроскопическое устройство приборов. Операторы момента импульса одной частицы и его компонент имеют вид ![]() , оператор кинетической энергии единственной частицы равен
, оператор кинетической энергии единственной частицы равен ![]() , а для системы нескольких частиц представляет собою сумму вида
, а для системы нескольких частиц представляет собою сумму вида  . Радиус-вектор частицы
. Радиус-вектор частицы ![]() , и его оператор представляет собой просто множитель перед волновой функцией, т.е. имеет вид:
, и его оператор представляет собой просто множитель перед волновой функцией, т.е. имеет вид: ![]() . Оператор потенциальной энергии это также просто множитель перед волновой функцией U
(r
)×, оператор полной энергии – гамильтониан складывается из операторов кинетической и потенциальной энергии:
. Оператор потенциальной энергии это также просто множитель перед волновой функцией U
(r
)×, оператор полной энергии – гамильтониан складывается из операторов кинетической и потенциальной энергии:![]() . (5.4) Принимается, что
. (5.4) Принимается, что ![]() и операторы всех прочих динамических переменных построены из этих двух по формулам классической механики.
и операторы всех прочих динамических переменных построены из этих двух по формулам классической механики.
Причина классической схемы взаимосвязи кроется в том, что операторы являются образами макроскопически устроенных приборов, а конструкционные компоненты которых подчиняются законам классической (макроскопической) физики.
Состояния и волновые функции, соответствующие определённым квантованным значениям физически наблюдаемой величины - тем, которые непосредственно проявляются в измерениях, называются чистыми.
Постулат 3. Уравнения Шрёдингера (временное и стационарное)
Формулировка:
Волновые функции, описывающие возможные состояния изменяющейся во времени физической системы, являются решениями временного уравнения Шрёдингера:
![]() (5.5)
(5.5)
Для стационарной системы уравнение Шрёдингера принимает вид операторного уравнения на собственные значения гамильтониана:
![]() (5.6)
(5.6)
Обратимся к стационарнымсистемам. Введём гамильтониан, не зависящий от времени, и получится стационарное уравнение Шрёдингера. Выявим смысл комплексного сопряжения волновых функций как признак механической обратимости во времени решений уравнения Шрёдингера:

Результат (5.9)- это стационарное уравнение Шрёдингера. Оно представляет собой операторное выражение закона сохранения энергии стационарной системы. Это чисто пространственная часть общего решения. Временная часть описывает периодический процесс.
Внимание! Операция комплексного сопряжения временной компоненты волновой функции состоит в замене знака перед аргументом - временем в показателе комплексной экспоненты. Эта простая алгебраическая операция совершенно идентична простой замене знака перед переменной времени. Получается, что при изменении отсчёта времени на обратное, не изменяются законы, которым починяется физическая система. Это важнейший результат, состоящий в том, что уравнение Шрёдингера описывает процессы, обратимые во времени.
Постулат 4. Суперпозиция состояний. Состояния чистые и смешанные. Математические и физические основания принципа суперпозиции
Формулировка 1 (скорее математическая):
Если две волновые функции fp и fq являются решениями операторного уравнения на собственные значения, то их линейная комбинация F=cp fp + cq fq также является его решением.
Истоки этой формулировки лежат в теории дифференциальных уравнений.
Формулировка 2 (скорее физическая):
Если система может находиться в состояниях с волновыми функциями fp и fq , то она может находиться и в состоянии с волновой функцией F=cp fp + cq fq .
Истоки этой формулировки происходят из убеждения, что до опыта нельзя предсказать, в каком состоянии находится система, а потому приходится допустить для неё сразу все возможности.
Речь о тех функциях, что совокупность которых образует спектр собственных функций эрмитова оператора (оператора динамической переменной). Эта ситуация может быть распространена на любое число собственных функций линейного самосопряжённого оператора: ![]()
Этот постулат называется принципом суперпозиции состояний и допускает обобщение на любое число собственных функций, образующих спектр эрмитова оператора. Функции fk отвечают так называемым чистым состояниям, а их суперпозиция F - смешанному состоянию.
Постулат 5. Средние значения динамических переменных. Математические ожидания для динамических характеристик состояний чистых и смешанных
Формулировка:
Среднее значение динамической переменной, полученное в результате серии испытаний (измерений) совпадает с математическим ожиданием динамического оператора этой переменной, которое вычисляется по формуле:
 ; (5.11)
; (5.11)
Для чистых состояний это уравнение является формальным следствием 2-го постулата, но для случая смешанных состояний эта формула постулируется и тем самым возводится в ранг физического закона.
Постулат 6. Принцип Паули
Формулировка:
Полная волновая функция, коллектива идентичных фермионов антисимметрична относительно перестановки любой пары частиц между их индивидуальными одночастичными состояниями.
Это свойство можно записать в виде
![]() . (5.12)
. (5.12)
О перестановочной симметрии коллектива частиц.
Удобно ввести оператор перестановки ![]() , действие которого состоит в том, что он меняет местами идентичные частицы с номерами k и l между их одночастичными состояниями или что совершенно одно и то же – меняет состояния этих двух частиц между собой.
, действие которого состоит в том, что он меняет местами идентичные частицы с номерами k и l между их одночастичными состояниями или что совершенно одно и то же – меняет состояния этих двух частиц между собой.
Если заранее оговорить, что всегда номера идентичных частиц в коллективе определяются просто порядковым номером в цепочке-перечислении, то номер можно и не записывать в явной форме. В таком случае записывая в позиции частицы символ какой-то волновой функции, удобно считать её символом состояния, в которое частица попадает.
Действуя на волновую функцию, оператор перестановки исторгает из неё собственное значение, но при этом умудряется её самоё не изменять. Перед нею просто возникает некоторое число - собственное значение этого оператора. Если же оператор перестановки применить к волновой функции коллектива повторно, то обе переставляемые частицы возвращаются на исходные позиции – в исходные состояния, и волновая функция обязана обратиться вновь сама в себя. Система возвращается в исходную ситуацию, и поэтому собственное значение квадрата оператора перестановки равно единице. Получаем равенства:
