| Скачать .docx |
Реферат: Радиолокация, радиолокационные цели
Радиолокация. Радиолокационные цели. ЭПР.
(реферат)
Содержание
1.Ведение 3
2.Радиолокационные цели_ 6
2.1.Эффективная площадь рассеяния цели (ЭПР). 8
2.2.Сложные и групповые цели_ 9
2.3.Объемно-распределенные цели_ 11
2.4. Поверхностно-распределенные цели_ 14
Заключение 17
Список литературы_ 18
1. Ведение
Радиолокация представляет собой средство расширения возможностей человека определять наличие и положение объектов за счет использования явлений отражения радиоволн этими объектами. Ее ближайшим конкурентом при выполнении этих функций является оптическая техника, включающая телескопы, которые обладают высокой точностью и обычно имеют фотографические регистрирующие устройства. Преимущество радиолокационных средств по сравнению с оптическими состоит в том, что радиолокационные устройства могут работать в темноте и сквозь облака, обладают большой дальностью действия и позволяют определять дальность до объекта со значительно большей точностью, нежели оптические устройства. Хотя световые волны также являются электромагнитными, но в радиолокации частота их намного ниже. Это позволяет применять радиотехнические методы и схемы.
Развитие радиолокации явилось важной частью технической революции двадцатого века. Военная техника, использующая принципы радиолокации, впервые была создана перед самым началом второй мировой войны; с этого времени наблюдается быстрый и непрерывный прогресс в указанной области.
Основная идея радиолокации состоит в том, что электромагнитные волны распространяются через атмосферу по определенным законам с известной скоростью, приблизительно равной скорости света в вакууме. Любые препятствия или изменения характеристик среды на пути распространения радиоволн приводят к возникновению отражений, которые могут быть обнаружены и, таким образом, становятся источником информации о наличии и свойствах таких препятствий или изменений. Измерение времени запаздывания отраженного сигнала по отношению к излученному позволяет получить данные о положении препятствия, т. е. «цели». В случае обычной «однопозиционной» радиолокации (когда передатчик и приемник совмещены и расположены в одном месте в отличие от «двухпозиционных»[1] систем , в которых отраженный сигнал принимается в пункте, удаленном от передатчика) время запаздывания непосредственно характеризует расстояние от места расположения приемника и передатчика до цели. Измерение времени запаздывания облегчается, если передатчик излучает короткие импульсы электромагнитной энергии. Идея импульсного излучения лежит в основе большинства практических применений радиолокации.
Информация о скорости целей может быть получена измерением доплеровского сдвига частоты между излученными и принятыми колебаниями, а угловые координаты удаленных целей — посредством сопоставления характеристик отраженных сигналов с диаграммами направленности передающей и приемной антенн. Наконец, сведения о размерах, форме и отражательной способности цели можно получить путем сравнения формы огибающей отраженных и излученных колебаний.
В зависимости от особенностей применения, радиолокационная информация может быть представлена в различном виде. Имеется ряд методов индикации с использованием осциллоскопов, которые создают оператору удобные условия для наблюдения за наличием, положением и размерами целей. Так, в радиолокационных станциях (РЛС) обнаружения целей индикатор кругового обзора (ИКО) с яркостной отметкой является эффективным средством отображения «картины» расположения целей вокруг РЛС. С другой стороны, изменения положения цели могут явиться источником формирования напряжений, управляющих положением антенны (в случае РЛС сопровождения цели) для обеспечения прицеливания и стрельб соответствующими видами оружия, либо для управления полетом ракет путем использования линии связи. Чтобы решить некоторые важные задачи, данные, полученные при помощи радиолокационной станции, запоминаются в соответствующей форме для дальнейшей их обработки на электронной вычислительной машине.
Практические применения радиолокации в настоящее время отличаются большим разнообразием. Некоторые из наиболее важных задач радиолокации связаны с ее применением в военной технике; сюда относится обзор пространства и обнаружение самолетов противника и наземных подвижных объектов, обеспечение данных для управления орудийным огнем, а также данных для управления ракетами в полете. Кроме того, радиолокационные средства широко используются в навигации как самолетов, так и кораблей (особенно в ночное время и в условиях тумана), они являются важным элементом современных систем управления воздушным движением, используются с целью управления движением автомашин и имеют большое значение для обеспечения прогнозов погоды. Радиолокация — отличное средство для исследования земной атмосферы и ионосферы, а также для изучения метеоров. В настоящее время радиолокационные устройства используются для обзора космического пространства, обнаружения и слежения за искусственными спутниками Земли, а также в системах противоракетной обороны. Также радиолокация применяется для астрономических наблюдений соседних космических тел солнечной системы: Луны, Солнца, Венеры, Марса и Юпитера. Области применения радиолокации по мере дальнейшего освоения космического пространства, по всей вероятности, будут все больше расширяться. Последние годы не менее актуальными стали вопросы подповерхностного зондирования и нелинейной локации. Подповерхностная радиолокация дает информацию о свойствах и параметрах среды, ее неоднородности. Нелинейная радиолокация (поиск элементов с p-n переходом или нелинейной вольтамперной характеристикой), используется при поиске от различных радиозакладок, «жучков» и прочих электронных средств незаконного съема информации, до радиоуправляемых фугасов и взрывных устройств.
Радиолокационная техника, с одной стороны, использует многие передовые отрасли современной техники, с другой стороны, способствует их развитию. Т.е. на всех этапах своего развития и применения радиолокация тесно переплетается с другими областями науки и техники.
Полезно указать на некоторые другие типы систем, родственных радиолокации: звуколокационные (эхолокационные) системы работают по такому же принципу, как и РЛС, но используют вместо радиоволн акустические волны, радионавигационная система Лоран, хотя и не основана на использовании отраженных сигналов, однако для определения расстояний здесь также необходимо измерять время запаздывания при распространении радиоволн. Многие методы анализа и расчета радиолокационных систем полностью применимы и к этим родственным системам.
2.радиолокационные цели
Электромагнитная волна, падающая на объект, независимо от его природы вызывает вынужденные колебания свободных и связанных зарядов, синхронные с колебаниями падающего поля. Вынужденные колебания зарядов создают вторичное поле внутри или вне тела. В результате этого энергия электромагнитной волны, падающей на цель, рассеивается во всех направлениях, в том числе и в направлении к радиолокационной станции. Приходящая в точку приема, переизлученная волна представляет собой отраженный целью сигнал.
Характер вторичного излучения (отражения) электромагнитных волн зависит от формы объекта, расположенного на пути их распространения, его размеров и электрических свойств, а также от длины падающей волны и ее поляризации.
Принято различать зеркальное, диффузное и резонансное отражения. Если линейные размеры отражающей поверхности много больше длины волны, а сама поверхность гладкая, то возникает зеркальное отражение. При этом угол падения радиолуча равен углу отражения, и волна вторичного излучения не возвращается к РЛС (за исключением случая нормального падения).
Если линейные размеры поверхности объекта велики по сравнению с длиной волны, а сама поверхность шероховатая, что имеет место диффузное отражение. При этом благодаря различной ориентации элементов поверхности электромагнитные волны рассеиваются в различных направлениях, в том числе и в направлении на РЛС. Резонансное отражение наблюдается в том случае, когда линейные размеры отражающих объектов или их элементов равны нечетному числу полуволн. В отличие от диффузного отражения, вторичное резонансное излучение обычно обладает большой интенсивностью и резко выраженной направленностью, зависящей от конструкции и ориентации вызывающего отражение элемента.
В тех случаях, когда длина волны велика по сравнению с линейными размерами цели, падающая волна огибает цель и интенсивность отраженной волны ничтожно мала.
С точки зрения формирования сигнала при отражении объекты радиолокационного наблюдения принято делить на малоразмерные и распределенные в пространстве или на поверхности.
К малоразмерным относятся объекты, размеры которых значительно меньше размеров элемента разрешения РЛС по дальности и угловым координатам. В ряде случаев малоразмерные объекты имеют простейшую геометрическую конфигурацию. Их отражающие свойства могут быть легко определены теоретически и предсказаны для каждого конкретного относительного расположения рассматриваемой цели и РЛС. В реальных условиях цели простейшего типа встречаются довольно редко. Чаще приходится иметь дело с объектами сложной конфигурации, которые состоят из целого ряда жестко связанных между собой простейших отражающих элементов. Примерами целей сложной конфигурации могут служить самолеты, корабли, различные сооружения и т. д.
Другие цели представляют собой совокупность отдельных объектов, распределенных в определенной области пространства, значительно превышающей по своим размерам элемент разрешения РЛС. В зависимости от характера этого распределения различают объемно-распределенные (например, дождевое облако) и поверхностно-распределенные (поверхность суши и т. д.) цели. Отраженный от такой цели сигнал является результатом интерференции сигналов отражателей, распределенных в пределах элемента разрешения.
Для фиксированного взаимного положения РЛС и отражающих объектов амплитуда и фаза отраженной волны имеют вполне определенную величину. Поэтому в принципе для каждого конкретного случая может быть определен результирующий суммарный отраженный сигнал. Однако в процессе радиолокационного наблюдения относительное положение целей и РЛС обычно меняется, что приводит к случайным флюктуациям интенсивности и фазы результирующих отраженных сигналов.
2.1.Эффективная площадь рассеяния цели (ЭПР).
Расчет дальности радиолокационного наблюдения требует количественной характеристики интенсивности отраженной волны. Мощность отраженного сигнала на входе приемника станции зависит от целого ряда факторов и прежде всего от отражающих свойств цели. Обычно радиолокационные цели характеризуются эффективной площадью рассеяния. Под эффективной площадью рассеяния цели в случае, когда антенна РЛС излучает и принимает электромагнитные волны одной и той же поляризации, понимается величина σц , удовлетворяющая равенству σц П1 =4πК2 П2 , где П1 -плотность потока мощности прямой волны данной поляризации в точке расположения цели; П2 — плотность потока мощности отраженной от цели волны данной поляризации у антенны РЛС; R — расстояние от РЛС до цели. Значение ЭПР непосредственно может быть вычислено по формуле
σц П1 =4πR2 П2 / П1
Как следует из формулы приведенной выше, σц имеет размерность площади. Поэтому ее условно можно рассматривать как некоторую эквивалентную цели нормальную радиолучу площадку площадью σц , которая, изотропно рассеивая всю падающую на нее от РЛС мощность волны, создает в точке приема ту же плотность потока мощности П2 , что и реальная цель.
Если задана ЭПР цели, то при известных величинах П1 и R можно вычислить плотность потока мощности отраженной волны П, а затем, определив мощность принимаемого сигнала, оценить дальность действия радиолокационной станции.
Эффективная площадь рассеяния σц не зависит ни от интенсивности излучаемой волны, ни от расстояния между станцией и целью. Действительно, всякое увеличение П1 ведет к пропорциональному увеличению П2 и их отношение в формуле не изменяется. При изменении расстояния между РЛС и целью отношение П2 /П1 меняется обратно пропорционально R2 и величина σц при этом остается неизменной.
2.2.Сложные и групповые цели
Рассмотрение простейших отражателей не вызывает затруднения. Большинство реальных радиолокационных целей представляет собой сложную комбинацию отражателей различного типа. В процессе радиолокационного наблюдения таких целей имеют дело с сигналом, который является результатом интерференции нескольких сигналов, отраженных от отдельных элементов цели.
При облучении сложного объекта (например, самолет, корабль, танк и т. д.) характер отражений от его отдельных элементов сильно зависит от их ориентации. В некоторых положениях определенные части самолета или корабля могут давать весьма интенсивные сигналы, а в других положениях интенсивность отраженных сигналов может падать до нуля. Кроме того, при изменении положения объекта относительно РЛС меняются фазовые соотношения между сигналами, отраженными от различных элементов. В результате этого возникают флюктуации результирующего сигнала.
Возможны и другие причины изменений интенсивности отраженных сигналов. Так, может наблюдаться изменение проводимости между отдельными элементами самолета, одной из причин которого являются вибрации, обусловленные работой двигателя. При изменении проводимости меняются распределения токов, наведенных на поверхности самолета, и интенсивность отраженных сигналов. У винтовых и турбовинтовых самолетов дополнительным источником изменения интенсивности отражений является вращение винт.
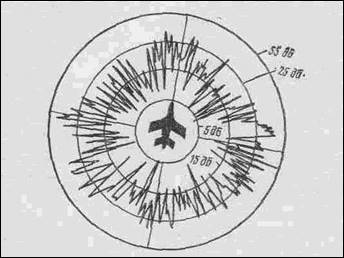
Рис 2.1. Зависимость ЭПР цели от ракурса.
В процессе радиолокационного наблюдения взаимное положение самолета (корабля) и РЛС непрерывно меняется. Результатом этого являются флюктуации отраженных сигналов и соответствующие им изменения ЭПР. Законы распределения вероятностей эффективной площади рассеяния цели и характер изменений этой величины во времени обычно определяются экспериментально. Для этого записывают интенсивность отраженных сигналов и после обработки записи находят статистические характеристики сигналов и ЭПР.
Как показали многие исследования, для флюктуации σц самолетов с достаточной точностью справедлив экспоненциальный закон распределения
W (σц ) = (1/<σц >) ехр ( — σц /<σц >).
где <σц > - среднее значение ЭПР.
Диаграммы обратного излучения кораблей имеют более тонкую лепестковую структуру, чем диаграммы самолетов, что объясняется значительно большими размерами и сложной конструкций кораблей. Отражающие элементы корабля многочисленны и разнообразны, поэтому корабль также можно рассматривать как группу элементов, отражения от которых имеют случайные фазы.
Экспериментальные исследования показывают, что флюктуации ЭПР корабля приближенно описываются также экспоненциальным законом распределения.
Данные о законах распределения амплитуд сигналов или ЭПР необходимы для расчета дальности действия РЛС и обоснования методики обработки сигналов. Сведения о функции корреляции и спектра флюктуации кроме того важны при определении точности измерения координат.
При практической оценке дальности действия радиолокационной станции прежде всего обычно пользуются средним значением ЭПР <σц > Эту величину можно получить усреднением значений <σц > для различных направлений падения облучающей волны. В таблице приведены средние значения ЭПР различных реальных целей, полученные в итоге обобщения большого числа измерений на волнах сантиметрового диапазона. Пользуясь этими величинами, можно произвести вычисления средних значений дальности обнаружения различных целей.
Тип радиолокационной цели |
σц ,м2 |
Истребитель Средний бомбардировщик Дальний бомбардировщик Транспортный самолет Крылатая ракета Головная часть баллистической ракеты Крейсер Транспорт малого тоннажа Транспорт среднего тоннажа Транспорт большого тоннажа Траулер Малая подводная лодка в надводном состоянии Рубка подводной лодки Катер Человек |
3-5 5-20 10—50 До 50 0,3—0,8 10-3 — 1,0 14000 150 7500 15000 750 140 1 100 0,8 |
2.3.Объемно-распределенные цели
В радиолокационной практике часто встречаются отражения от объемно-распределенных целей, состоящих из большого числа отражающих элементов, относительно близко расположенных друг к другу и занимающих значительную область пространства. Отражающие элементы, принимающие участие в формировании суммарного сигнала, распределяются в пределах некоторого объема V (отражающий объем), определяемого разрешающей способностью РЛС по угловым координатам и дальности
Определить эффективную площадь рассеяния объемно-распределенной цели в предположении, что элементарные отражатели обладают различными значениями σi довольно трудно. Поэтому будем считать, что элементарные отражатели, заполняющие объем V, имеют одинаковые ЭПР, равные σц.
Предположим, что элементарные отражатели распределены в пространстве равномерно с плотностью n0 , Тогда в объеме содержится N = n0 V отражателей, а их средняя ЭПР
<σц >=n0 σ0 V
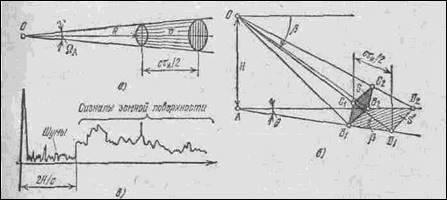
Рис.2.2. К определению характеристик объемных (а) и поверхностных (б) целей.
Подставляя в это выражение значение объема цилиндра с основанием ΩA R2 и высотой сτ/2, получаем формулу для вычисления средней ЭПР объемно-распределенной цели
<σц >=n0 σ0 ΩA R2 сτ/2,
с учетом того, что телесный угол антенного луча ΩA выражается через эффективную площадь А или или коэффициент направленного действия антенны D, получаем
<σц >=2πn0 σ0 R2 сτ/D,
из которой следует характерная особенность объемно-распределенных целей: зависимость эффективной площади рассеяния от параметров РЛС Тд и D, а также от расстояния между станцией и целью.
Полученные соотношения позволяют оценить среднее значение мощности результирующего сигнала объемно-распределенной цели. Амплитуда результирующего сигнала меняется, так как отдельные отражатели все время изменяют свое положение относительно друг друга. Благодаря этому результирующий сигнал, воспринимаемый приемником РЛС в следующих один за другим периодах повторения, флюктуирует во времени по случайному закону.
Следует иметь в виду, что длительность сигнала, отраженного от объемно-распределенной цели, может значительно превышать длительность излучаемого импульса и определяется радиальной протяженностью объемной цели. По мере распространения излученного импульса отражения образуются от новых областей объемно-распределенной цели.
Если внутри объема, заполненного распределенными отражателями, находится какой-либо объект (например, самолет), то радиолокационное наблюдение за ним затрудняется. Отражения от объемно-распределенной цели в данном случае являются помехой, которая будет маскировать полезный сигнал. Условия наблюдения полезного сигнала можно характеризовать отношением мощностей сигнала и помехи. Величина отношения мощности сигнала, отраженного от цели, к средней мощности сигнала, обусловленного объемно-распределенными отражателями, равняется отношению их эффективных площадей:
![]()
Из данной формулы следует, что для повышения эффективности выделения полезных сигналов на фоне отражений от объемно-распределенной цели целесообразно уменьшать длительность импульса и сужать диаграмму направленности антенны.
На практике наиболее часто приходится встречаться с отражениями от гидрометеоров. Для дождя, средний диаметр капель которого d0 величина σц =300d0 6 /λ4 и отношение сигнал/помеха
![]()
Отражение электромагнитных волн от гидрометеоров может быть использовано в интересах метеорологии в качестве полезных сигналов. С их помощью можно определить местоположение атмосферных образований, их интенсивность, а иногда и направление перемещения.
2.4. Поверхностно-распределенные цели
Примерами поверхностно-распределенных целей являются: травяной покров, лес, кустарник, пашня, волны на водной поверхности. В отличие от объемно-распределенных целей в данном случае трудно выделить отдельные отражающие элементы. Располагаясь случайным образом, они образуют сплошной поверхносnный слой, от которого происходит рассеянное отражение электромагнитных волн.
Предположим, что в точке О (рис. 2.3, б) на высоте Н над поверхностью земли находится самолет. Антенный луч имеет в горизонтальной плоскости ширину θ и облучает на поверхности земли сектор AD1 D2 .
Будем считать, что РЛС излучает импульсы длительностью τи . Даже при неподвижной антенне облучение поверхности в секторе AD1 D2 происходит не одновременно. Первый отраженный сигнал приходит через время τ= 2Н/с после зондирующего импульса (рис. 2.3, в). Далее, несмотря на импульсный характер излучения, на вход приемника РЛС непрерывно поступают отраженные сигналы. Это объясняется тем, что по мере распространения излученной волны отраженная волна возвращается от все более удаленных участков поверхности. Поскольку поверхность непрерывна, будет непрерывен и сигнал на входе приемника. В каждый данный момент времени действующий на вход приемника сигнал является результатом сложения сигналов, отраженных от элементарных отражателей, случайным образом расположенных в пределах разрешаемой площадки поверхности.
По азимуту разрешаемая площадка ограничена шириной диаграммы направленности. Границы разрешаемой площадки по дальности зависят от длительности импульса τи и угла визирования β. Так, в нашем случае B1 D1 =сτи /2cos β.
Величина эффективной площади рассеяния в случае однородной поверхности со случайным расположением неровностей пропорциональна площади S', формирующей в данный момент отраженный сигнал. Для того чтобы определить величину (σц , рассмотрим площадку S, перпендикулярную направлению падения волны. Через ее поверхность проходит вся энергия, отразившаяся от разрешаемой площадки B1 B2 D1 D2 . Разрешаемая на поверхности земли площадка имеет площадь S'=Rθτи c/2cosβ. Соответственно площадь поверхности, перпендикулярной линии визирования, S = S' sinβ= (Rθτи c/2)tgβ. Зная S, можно определить величину σц , если ввести коэффициент рассеяния γ, учитывающий влияние отражающих свойств земной поверхности:
σц = (γ Rθτи c/2)tgβ
Характерным для поверхностно-распределенной цели является зависимость ЭПР σц от параметров радиолокационной станции τи и θ, а также от расстояния до рассматриваемой площадки и от угла, под которым осуществляется ее визирование. В этом отношении свойства поверхностно-распределенной цели близки к свойствам объемно-распределенной цели. Как видно из последней формулы, отражающие свойства поверхностно-распределенной цели зависят от величины γ. Зная γ и другие параметры, характеризующие условия обзора, можно определить ЭПР и перейти к расчету интенсивности отраженного сигнала.
В ряде случаев оказывается удобным характеризовать отражающие свойства поверхностно-распределенной цели удельной эффективной площадью рассеяния, равной отношению ЭПР площадки нее площади S':
σ0 ц = σц /S' == γ sinp.
На отражающие свойства поверхности и, следовательно, на величину σц влияют неровности поверхности, длина волны, угол падения (угол визирования) волны и ее поляризация, диэлектрическая проницаемость почвы.
Все земные покровы, с которыми приходится встречаться на практике, можно, грубо говоря, разделить на гладкие и шероховатые. К гладким поверхностям относятся дороги с асфальтовым покрытием, бетонные покрытия и т.д. Для них интенсивность отраженного сигнала быстро уменьшается с уменьшением угла визирования и зависит от поляризации падающей волны. У шероховатых поверхностей размеры неровностей значительно превышают длину волны. Такой характер имеют участки местности, заросшие травой, посевы, заросли кустарника, лес и т. д. Исследования показывают, что у реальных шероховатых поверхностей величина γ мало зависит от угла визирования β и поляризации. При этом для каждого типа земной поверхности величины γ и σ0ц обычно лежат в определенных пределах. Благодаря этому, например, по величине σ0ц можно судить об общем характере местности, от которой приходят отраженные сигналы.
Радиолокационные отражения от поверхности, покрытой растительностью, претерпевают сезонные изменения, обусловленные изменением содержания воды в растениях и в самой поверхности (изменением влажности), а также наличием или отсутствием снежного покрова. При наблюдении поверхностей, покрытых растительностью, отражение происходит от множества случайных отражателей (листья, стебли, ветки). Эти отражатели приводятся в движение ветром. Чем сильнее ветер, тем интенсивнее их движение. Кроме подвижных отражателей, существуют случайно расположенные неподвижные отражатели (скалы, стволы деревьев). Результирующий сигнал представляет сумму сигналов отражателей первого и второго рода.
Если РЛС неподвижна, то отражения от перемещающихся элементов дадут флюктуирующую составляющую сигнала, а отражения от неподвижных элементов — стабильную,
Заключение
В ходе работы рассмотрены назначение и принципы радиолокации, часть основных терминов и определений, классификации целей по эффективной поверхности рассеяния.
Список литературы
1. Современная радиолокация. Анализ, расчет и проектирование. Под редакцией Кобзарева Ю.В., М., Сов.радио, 1969г.-704стр.
2. Дулевич В.Е. Теоретические основы радиолокации. М., Сов.радио, 1978г. – 608стр.
3. Ширман Я.Д. Теоретические основы радиолокации. М., Сов.радио, 1970г. – 560стр.
[1] Двухпозиционную радиолокацию также называют полуактивной