| Скачать .docx |
Дипломная работа: Распределенная система терминального управления техническим объектом
Министерство образования и науки Украины
Севастопольский национальный технический университет
Кафедра технической кибернетики
пояснительная
записка
к ________________дипломному проекту_________________________
(дипломному проекту (работе); выпускной работе бакалавра, магистра)
на тему: __«Распределенная система терминального управления техническим объектом»
студент группы Зиновьев Константин Игоревич_________
(фамилия, имя, отчество)
Направление подготовки (специальность) _____7.091401 – системы управления и автоматики
Руководитель Альчаков В.В., ассистент кафедры ТК
(фамилия, инициалы, должность)
Консультанты _______ ( _______ )
___________________ ( ________ )
___________________ ( _______ )
______ ________ (________ )
Зав. кафедрой __________ (Краснодубец Л.А.)
2005 г.
Министерство образования и науки Украины
Севастопольский национальный технический университет
«Согласованно»
руководитель дипломного проекта
________________ (В.В. Альчаков)
«Утверждаю»
заведующий кафедрой ТК
______________ (Л.А. Краснодубец)
Техническое задание
К дипломному проекту
«Распределенная система терминального управления техническим объектом»
Исполнитель:
ст. гр. А-61з
_________________ (Зиновьев К.И.)
« ___ » ________________ 2005 г.
Нормоконтролер:
_________________ (Шушляпин Е.А.)
« ___ » ________________ 2005 г.
2005
1 Основание для разработки
Основанием для разработки дипломного проекта на тему «Распределенная система терминального управления техническим объектом» служит приказ ректора № 124п от 30.03.2005.
2 Назначение разработки
Разрабатываемая система предназначена для построения компьютерной программы управления распределенной системой терминального управления сложными техническими объектами, функционирующими в условиях, опасных для жизни человека.
3 Технические требования
3.1 Требования к условиям эксплуатации
Разработанная система должна эксплуатироваться на IBM совместимых компьютерах в помещении, соответствующем санитарным нормам, а, именно: площадью на одного человека не менее 4,5 м2 и объёмом воздуха 15 м3 . В помещении должны поддерживаться следующие метеорологические условия:
- в холодный период температура воздуха 20° – 30° С, относительная влажность 40 – 60%;
- в теплый период температура воздуха 22° – 25° С, относительная влажность 40 – 60%.
3.2 Требования к составу и параметрам технических средств
Для эффективной работы программы необходим персональный компьютер типа IBMPC со следующими параметрами:
- процессор семейства IntelPentium (Celeron)/AMD с тактовой частотой не менее 500 КГц;
- оперативная память (128 Mb);
- видеопамять (32 Мб)
- операционная система Windows 98/NT/2000/Me/XP;
- накопитель на жестком магнитном диске (20 Гб);
- принтер (при необходимости вывода информации на печать);
- монитор SVGA;
- манипулятор типа «мышь».
3.3 Требования упаковке и хранению
Программное обеспечение распределенной системы терминального управления распространяется в виде отдельного исполнительного файла, для хранения которого на жестком диске персонального компьютера отводится отдельная директория. Для поставки заказчику, могут использоваться любые накопители (лазерные диски, flash-диски). Ввиду достаточно большого объема исполнительного файла не рекомендуется использовать гибкие магнитные диски.
3.4 Требования к программному обеспечению (ПО)
Требования, предъявляемые к разрабатываемому программному продукту (ПП) заключаются в следующем:
- ПП должен функционировать под управлением операционной системы семейства MSWindows.
- ПП должен обеспечивать возможность введение исходных данных и управляющих команд с помощью клавиатуры и мыши.
- ПП должен удовлетворять параметрам и техническим требованиям, предъявляемым к программным средствам, разработанным для работы на персональных ЭВМ типа IBMPC, под управлением операционной системы семейства Widows.
- ПП должен обеспечивать точность и стабильность вычислений.
- ПП должен обеспечивать вывод графических и табличных результатов работы на экран.
3.5 Требования к информативной и программной совместимости
Разрабатываемое программное обеспечение может быть реализовано на ЭВМ типа IBM PC, с установленным программным обеспечением:
- операционная система Windows;
- среда визуального программирования C++ Builder;
- пакет для инженерных расчетов Matlab.
3.6 Требования к технической документации
По окончании разработки должна быть представлена в одном экземпляре пояснительная записка к дипломному проекту, содержащая следующие разделы:
- техническое задание;
- пояснительная записка к техническому заданию;
- результаты проведенных исследований;
- описание программной модели;
- текст программной модели;
- расчёт экономической эффективности;
- рекомендации по охране окружающей среды;
- раздел гражданской обороны;
- графический материал, содержащий схему работы программы.
3.7 Порядок приёмки разработки
Результаты разработки проверяются руководителем проекта и нормоконтролером, качество выполнения работы оцениваются руководителем и рецензентом дипломного проекта.
Приёмка разработки осуществляется государственной экзаменационной комиссией по специальности «системы управления и автоматика», порядок работы которой определяется ректором СевНТУ.
4 Календарный план
| № | Стадии разработки | Этапы разработки | Начало разработки | Конец разработки |
| 1 | Исследовательские работы | Анализ предметной области и обоснование необходимости разработки | 01.02.2005 | 14.02.2005 |
| 2 | Работа над проектом | Разработка структуры проекта, концепции и логической структуры | 14.02.2005 | 07.03.2005 |
| 3 | – “ – | Разработка методического обеспечения | 07.03.2005 | 21.03.2005 |
| 4 | – “ – | Разработка алгоритмического и программного обеспечения | 21.03.2005 | 18.04.2005 |
| 5 | – “ – | Тестирование и отладка ПО | 18.04.2005 | 09.05.2005 |
| 6 | – “ – | Разработка разделов проекта, связанных с экономическим обоснованием разработки, гражданской обороной и охраной труда | 09.05.2005 | 23.05.2005 |
| 7 | – “ – | Оформление и подготовка проекта к защите | 23.05.2005 | 06.06.2005 |
Содержание
Введение
1. Постановка задачи
1.1 Функциональные требования к системе
1.2 Требования к программному обеспечению
1.3 Требования к ЭВМ
1.4 Требования к экспериментальной модели
2. Обзор методов дистанционного управления
2.1 Роль дистанционно управляемых систем
2.2 Основные методы и уровни дистанционного управления манипуляционными роботами
2.3 Командное управление манипуляторами и роботами на исполнительном уровне
2.4 Дистанционно-автоматическое управление манипуляционными роботами
3. Методы поиска терминального управления
3.1 Вариационная постановка задачи
3.2 Чисто терминальная постановка задачи
3.3 Синтез терминального управления, реализующего заданное движение системы
4. Концепция распределенной системы терминального управления робототехническим комплексом
4.1 Общая концепция РСТУ робототехническим комплексом
4.2 Концепция системы передачи управляющих команд
4.3 Концепция специализированного ПО РСТУ
5. Разработка экспериментальной модели РСТУ робототехнического комплекса
5.1 Назначение экспериментальной модели РСТУ
5.2 Построение экспериментальной модели
5.3 Численное моделирование и анализ исполнительной системы робота манипулятора
6. Разработка программного обеспечения системы терминального управления техническим объектом
6.1 Выбор среды разработки
6.2 Функциональные возможности ПО РСТУ
6.3 Требования к персональной ЭВМ
6.4 Руководство пользователя
6.5 Описание основных функций
7. Технико-экономическое обоснование дипломного проекта
7.1 Маркетинговые исследования проектируемого продукта
7.7.1 Потребительская ценность продукта
7.1.2 Портрет потребителя
7.1.3 Сегментация рынка
7.1.4 Оценка рыночной направленности
7.1.5 Конкурентоспособность программного продукта
7.2 Определение затрат на проектирование программного продукта
7.2.1 Расчёт трудоёмкости
7.2.2 Расчёт себестоимости часа машинного времени
7.2.3 Расчёт сметы затрат на проектирование
7.3 Формирование цены предложения
7.4 Расчёт капитальных затрат
7.5 Расчёт эксплуатационных расходов потребителя
7.6 Оценка эффективности проектируемого программного продукта.
7.6.1 Определение показателей чистого денежного потока
7.6.2 Определение показателей чистой текущей стоимости
7.7 Вывод
8. Охрана труда и окружающей среды
8.1 Анализ условий труда оператора ЭВМ в компьютерной лаборатории
8.2 Расчётная часть
8.2.1 Проектирование естественного освещения производственных помещений
8.2.2 Проектирование искусственного освещения производственных помещений
8.3 Вывод
Заключение
Библиографический список
Приложение А. Исходные тексты основных функций
Введение
Распределенные системы автоматического управления находят самое широкое применение во многих областях деятельности человека. В том числе это относится и к системам, в состав которых входят дистанционно управляемые роботы и манипуляторы, относящиеся к классу манипуляционных робототехнических систем. Бурное развитие промышленной робототехники, основной базой которой стали автоматически действующие манипуляционные роботы с программным управлением, позволило подойти к решению одной из наиболее актуальных задач – исключения ручного труда человека из сферы производства. При этом не только обеспечивается повышение производительности за счет интенсификации технологических процессов, но и существенно улучшается качество проводимых работ, повышается надежность выполнения операций [1].
Все это свидетельствует об актуальности разработок, связанных с использованием методов построения распределенных систем управления. В первую очередь это касается систем функционирующих в недетерминированных условиях экстремальных сред, где необходимо выполнять сложные операции исследовательского характера, проводить монтажно-сборочные работы с использованием универсального инструмента или оснастки. К таким средам в первую очередь относятся зоны с наличием радиоактивных излучений, опасных для здоровья человека. Подводно-технические работы, осуществляемые на больших глубинах, также рациональнее проводить с помощью манипуляционных роботов с дистанционно-автоматическим управлением.
Принципы дистанционно-автоматического управления представляются весьма перспективными при создании манипуляционных роботов, обслуживающих атомные электростанции и, в будущем, термоядерные энергетические установки. Большие возможности открывает использование манипуляционных роботов с дистанционно-автоматическим управлением в горнодобывающей и нефтеперерабатывающей промышленности.
Как было сказано выше, системы дистанционного управления в первую очередь ориентированны на работу в экстремальных условиях, что накладывает дополнительные требования к повышению точности работы сложных робототехнических устройств. Повысить точность управления можно за счет использования принципов терминального управления [2]. При таком управлении объект управления переходит из начального фазового состояния в предписанное конечное за заданный промежуток времени. Алгоритмы терминального управления получили весьма широкое распространение ввиду простой реализации с помощью ЭВМ. Это позволяет использовать в составе распределенной системы терминального управления микропроцессорную технику, что в свою очередь позволит миниатюризировать достаточно сложные технические решения.
Данный проект ставит своей целью разработку концепции и программного обеспечения для распределенной системы терминального управления техническим объектом, в роли которого выступает робототехнический комплекс. Такая система может быть эффективно использована при решении задач, связанных с построением систем автоматического управления, функционирующих в экстремальных условиях.
В первом разделе выполняется постановка задачи на дипломное проектирование. Во втором разделе дается обзор существующих методов построения дистанционно управляемых систем автоматического управления. В третьем разделе описывает основные принципы, использующиеся при синтезе терминальных управлений. Четвертый раздел описывает концепцию распределенной системы терминального управления, разрабатываемой в проекте. Пятый раздел связан с экспериментальной моделью проектируемой системы. Шестой раздел посвящен разработке программного обеспечения для распределенной системы терминального управления. Седьмой раздел связан с технико-экономическим обоснованием дипломного проекта. Восьмой раздел посвящен вопросам охраны труда и окружающей среды. Общие вопросы гражданской обороны освещены в девятом разделе.
1 постановка задачи
В рамках дипломного проекта необходимо разработать концепцию и программное обеспечение распределенной системы терминального управления техническим объектом. В качестве технического объекта необходимо рассматривать робототехнический комплекс.
1.1 Функциональные требования к системе
Разрабатываемая система терминального управления (РСТУ) техническим объектом должна быть адаптирована к функционированию в экстремальных условиях, т.е. условиях, в которых существует угроза жизни и здоровью человека. Система не должна быть полностью автоматической, в ее составе должна быть отведена роль для оператора – лица, принимающего решения и выполняющего установку необходимых параметров для функционирования системы, а также задающего команды исполнительным частям системы. Поскольку условия, в которых работает разрабатываемая система предполагает наличие экстремальных условий работы, необходимо построить распределенную систему терминального управления. В этом случае оператор, осуществляющий контроль и управление системой, и объект управления (робототехническая система), находятся на значительном удалении друг от друга, достаточном для обеспечения безопасности оператора. При формировании закона терминального управления возможно использование информации об окружающей обстановке от распределенных в пространстве датчиков, поэтому необходимо предусмотреть возможность оперативного обновления и поступления информации от измерительных систем датчиков на пульт управления оператору РСТУ.
Контроль и управление должны осуществляться с помощью специализированного программного обеспечения. Пересылка команд объекту управления может быть осуществлена с использованием сетевых технологий. Разрабатываемая система должна отвечать повышенным требованиям к надежности функционирования всех отдельных частей системы, поэтому рекомендуется рассмотреть возможность подключения резервных элементов, наиболее важных для обеспечения работоспособности системы.
1.2 Требования к программному обеспечению
Программное обеспечение (ПО) для РСТУ должно быть ориентировано на работу под управлением операционной системы семейства WindowsNT. Использование операционной системы семейства NT позволит повысить отказоустойчивость ПО. Разрабатываемое ПО должно обладать графическим интерфейсом пользователя, обеспечивающим интуитивно понятную работу оператора РСТУ с программой управления системой. Для представления результатов работы необходимо предусмотреть возможность отображения экспериментальных данных в виде таблиц и графических зависимостей. Для анализа аварийных и чрезвычайных ситуаций необходимо предусмотреть возможность протоколирования работы программы управления РСТУ.
При разработке следует использовать модульный подход к разработке программного обеспечения. Это позволит обеспечить возможность адаптации ПО к различным техническим объектам. В соответствии с функциональной спецификой РСТУ, разрабатываемое ПО должно поддерживать возможность обмена данными по локальным (или глобальным) сетям с использованием протокола TCP/IP.
1.3 Требования к ЭВМ
Разрабатываемое ПО пульта управления РСТУ должно быть ориентировано на работу на IBMPC совместимых персональных компьютерах. Минимальная конфигурация должна отвечать следующим условиям:
- процессор класса Intel Pentium/Celeron с тактовой частотой не менее 1 ГГц;
- объем оперативной памяти не менее 256 Мб;
- объем жесткого диска не менее 20 Гб;
- объем видеопамяти не менее 32 Мб;
- наличие сетевой платы, обеспечивающей пропускную способность 100 Мбит в секунду.
Персональная ЭВМ должна быть подключена к источнику бесперебойного питания.
1.4 Требования к экспериментальной модели
Для апробации алгоритмов управления рекомендуется создать имитационную модель, позволяющую промоделировать реакцию робототехнической системы на поданное терминальное управление. Использование экспериментальной имитационной модели позволит сэкономить значительные средства, необходимые для проведения натурных испытаний. Для построения такой модели рекомендуется использовать среду инженерных расчетов и моделирования Matlab. Разработанная модель может быть использована для исследовательских целей. При разработке модели, также как и при разработке программного обеспечение следует использовать модульный подход.
2 обзор методов дистанционного управления
2.1 Роль дистанционно управляемых систем
Дистанционно управляемые роботы и манипуляторы, относящиеся к классу манипуляционных робототехнических систем, находят самое широкое применение во многих областях деятельности человека.
Бурное развитие промышленной робототехники, основной базой которой стали автоматически действующие манипуляционные роботы с программным управлением, позволило подойти к решению одной из наиболее актуальных задач – исключения ручного труда человека из сферы производства. При этом не только обеспечивается повышение производительности за счет интенсификации технологических процессов, но и существенно улучшается качество проводимых работ, повышается надежность выполнения операций.
Однако использование автоматически действующих роботов, часто называемых манипуляторами с программным управлением, требует серьезной подготовки производства, организации более тесного их взаимодействия с другим технологическим оборудованием. Как правило, действия робота в составе оборудования автоматизированного производства строго определены его назначением, т.е. ограничены какой-либо одной сферой применения.
Специализация промышленных роботов позволяет обеспечить наиболее эффективную их эксплуатацию при выполнении определенных работ, например сборки, сварки, окраски и т.п. При этом эффективность эксплуатации робота и качество выполняемой им работы определяются во многом степенью его согласования с другим технологическим оборудованием в строго детерминированных условиях рабочей зоны.
Очевидно, что изменение условий в рабочей зоне требует адаптации самого промышленного робота при его программном управлении. Средства адаптации, входными элементами которых являются как датчики очувствления манипуляционного устройства, так и датчики информации об условиях в рабочей зоне, существенно усложняют робототехническую систему, уменьшая при этом и надежность ее работы. Достаточно большую сложность представляет формализованное описание внешней среды – рабочей зоны робота, необходимое при программировании действий робота в недетерминированных условиях рабочей зоны.
Этим определяется высокая эффективность дистанционного управления в период ввода программы в систему автоматического управления, т.е. в режиме обучения. Действительно, при дистанционном обучении робота человек-оператор имеет возможность непосредственно оценивать условия в рабочей зоне. Зрительный и слуховой аппараты человека достаточно совершенны, чтобы обеспечить действия манипуляционного робота при выполнении весьма сложных операций без привлечения каких-либо систем технического зрения и стереофонических систем, входящих в информационное обеспечение автоматически действующего робота [1].
Степень участия человека-оператора в управлении манипуляционным роботом не только определяется сложностью выполняемой операции, но и существенно зависит от структуры системы и принципа дистанционного управления. Так, при командном, копирующем и полуавтоматическом управлении манипулятором человек постоянно обеспечивает формирование движений его исполнительного устройства.
Супервизорное и диалоговое управления позволяют в значительной степени освободить человека от выполнения простейших, повторяющихся движений, работать в режиме диспетчирования действий робота. Очевидно, что при этом используется микропроцессорная система управления движением манипулятора. В ряде случаев требуется силомоментное или тактильное очувствление робота, позволяющее организовать наиболее рациональное взаимодействие с объектами работы.
Весьма эффективными при выполнении разнообразных операций с помощью манипуляторов универсального назначения являются системы комбинированного дистанционно-автоматического управления. В подобных робототехнических системах оператор подключается к управлению лишь в моменты выполнения наиболее сложных действий манипуляционного робота.
Наличие дистанционного режима позволяет обеспечить и оперативную коррекцию программы движения автоматически действующего робота, которую осуществляет человек-оператор, непосредственно наблюдающий за ходом работы.
Наиболее актуальным является переход с автоматического на дистанционное ручное управление в непредвиденных, заранее не запрограммированных ситуациях и особенно в аварийных условиях. Оперативное вмешательство человека-оператора в процесс автоматического действия робототехнической системы позволяет в целом ряде случаев осуществить сложные ремонтные работы без существенного усложнения самой системы управления робота.
Все это свидетельствует о необходимости широкого привлечения методов дистанционного управления при организации структуры автоматизированного производства. Однако наиболее актуальным остается использование дистанционно управляемых манипуляторов в недетерминированных условиях экстремальных сред, где необходимо выполнять сложные операции исследовательского характера, проводить монтажно-сборочные работы с использованием универсального инструмента или оснастки. К таким средам в первую очередь относятся зоны с наличием радиоактивных излучений, опасных для здоровья человека. Подводно-технические работы, осуществляемые на больших глубинах, также рациональнее проводить с помощью манипуляционных роботов с дистанционно-автоматическим управлением.
Принципы дистанционно-автоматического управления представляются весьма перспективными при создании манипуляционных роботов, обслуживающих атомные электростанции и, в будущем, термоядерные энергетические установки. Большие возможности открывает использование манипуляционных роботов с дистанционно-автоматическим управлением в горнодобывающей и нефтеперерабатывающей промышленности.
2.2 Основные методы и уровни дистанционного управления манипуляционными роботами
Отличительным признаком дистанционно управляемых манипуляционных роботов, однозначно выделяющим их из всего семейства робототехнических систем, является обязательное участие человека-оператора в процессе управления их действиями. Способность человека к быстрой ориентации в рабочей обстановке, анализу окружающей среды, принятию решений и выбору алгоритмов выполнения технологических операций, формированию рациональных законов движения в процессе работы – все эти естественные для него возможности весьма сложно реализуются даже с помощью самых совершенных систем восприятия информации и управляющих систем с элементами искусственного интеллекта.
Именно этим определяется необходимость использования дистанционного управления для выполнения нетиповых и сложных технологических операций в недетерминированных условиях рабочей зоны. Очевидно, что дистанционное управление оказывается единственно возможным способом обеспечения функционирования манипуляционных роботов в средах, недоступных для человека или опасных для его здоровья.
Первый опыт в использовании дистанционно управляемых манипуляторов был накоплен еще в пятидесятые годы двадцатого столетия при создании копирующих манипуляционных механизмов, выполняющих в боксах и камерах исследовательские работы с радиоактивными веществами. Именно в тот период была подтверждена возможность воспроизведения двигательных функций руки человека на расстоянии. Механические манипуляторы включали кинематически подобные задающее и исполнительное устройства, связанные между собой с помощью тросов и лент таким образом, что все изменения взаимного расположения звеньев задающего устройства (ЗУ) повторялись (копировались) соответствующими звеньями исполнительного устройства (ИУ). Это позволяет в рабочей зоне воспроизводить с достаточной степенью точности движения кисти руки оператора, управляющего положением в пространстве кистевого узла ЗУ. Важной особенностью подобных манипуляторов является возможность ощущения оператором усилий, действующих со стороны объекта манипулирования на ИУ. Это дает возможность оператору формировать законы движения задающего, а, следовательно, и исполнительного устройств с учетом воздействия нагрузки, т. е. так, как это происходит при выполнении человеком работ непосредственно рукой.
Таким образом, механические копирующие манипуляторы обладают свойством двунаправленной передачи не только перемещений, но и усилий. Образно говоря, они как бы увеличивают возможности рук человека, «удлиняя» их и позволяя войти в зоны, недоступные самому человеку.
Опыт создания отечественных копирующих манипуляторов позволил обеспечить отработку принципа дистанционного проведения работ при непосредственном наблюдении оператором условий в рабочей зоне.
Однако существенными недостатками таких манипуляторов являются малая удаленность оператора от опасной зоны, небольшая грузоподъемность, определяемая физическими возможностями оператора, а также существенные потери развиваемых оператором усилий на преодоление трений в механических передачах. Это привело к необходимости разработки и создания уже в полном смысле дистанционно управляемых манипуляторов, оснащенных не только системами управления движением исполнительных манипуляционных устройств, но и развитой информационной системой. Задачами этих систем является обеспечение наибольшей естественности работы оператора, создание эффекта его присутствия в рабочей зоне при выполнении технологических операций.
Большое значение создания дистанционно управляемых манипуляторов определяется широким развитием исследовательских и практических работ, связанных с освоением подводного и космического пространств, а также с созданием атомной и термоядерной энергетики.
Во всех указанных случаях в экстремальных для человека условиях, как правило, выполняются разнообразные операции в изменяющихся условиях рабочей зоны, что требует использования высокоманевренных манипуляционных механизмов.
Однако использование дистанционного управления оказалось эффективным не только для манипуляторов, предназначенных для работы в экстремальных средах. Бурно развивающаяся промышленная робототехника также все чаще обращается к этому методу управления, позволяющему существенно расширить функциональные возможности манипуляционных роботов с автоматическим управлением. Именно в промышленной робототехнике стали все шире использоваться и наиболее прогрессивные принципы дистанционно-автоматического управления.
Использование современной вычислительной и в первую очередь управляющей микропроцессорной техники позволило довести дистанционное управление манипуляционными роботами до уровней диалогового управления, при котором участие человека-оператора характеризуется рациональным сочетанием возможностей естественного интеллекта человека и искусственного интеллекта информационных и управляющих систем робота.
Рассмотрим основные методы дистанционного управления манипуляторами и манипуляционными роботами, которые достаточно однозначно можно соотнести с уровнями управления иерархической системы автоматического управления различных поколений роботов.
Понятие об уровнях управления в робототехнике было впервые введено Е. П. Поповым [3] и является обобщающим как для роботов с автоматическим управлением, так и для дистанционно управляемых манипуляциониых роботов.
Иерархическая схема робототехнической системы может быть достаточно однозначно представлена в виде четырех основных уровней управления (см. рисунок 2.1).
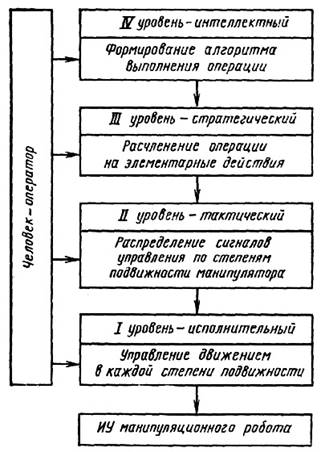
Рисунок 2.1 – Обобщенная схема дистанционного управления манипуляционным роботом
Первый уровень управления, называемый исполнительным, обеспечивает организацию управления движением отдельно в каждой степени подвижности ИУ манипуляционного робота. Распределение сигналов управления по степеням подвижности осуществляется на втором – тактическом уровне управления. Поэтому входной информацией для него является траектория и закон движения конечной точки манипулятора, т. е. рабочего органа, в частном случае – захватного устройства (захвата).
Формирование траекторий и законов движения манипулятора при выполнении элементарной операции происходит на стратегическом уровне управления путем расчленения операции на элементарные действия и движения. Следовательно, входной информацией на этом уровне является формализованное представление всей операции в целом.
На высшем, интеллектном уровне управления осуществляется формирование алгоритма выполнения каждой операции с учетом общих задач технологического процесса и обстановки в зоне проведения работ.
Человек-оператор, обладающий возможностью восприятия, анализа условий выполнения работ и принятия решения, может обеспечить управление на каждом из этих уровней. Однако наличие любого из верхних уровней управления усложняет техническую реализацию всей робототехнической системы, поэтому формирование иерархической структуры системы управления необходимо проводить с учетом возможностей ее технической реализации для каждого объекта автоматизации технологического процесса.
2.3 Командное управление манипуляторами и роботами на исполнительном уровне
Под исполнительным уровнем управления понимается организация управления движением отдельно в каждой из степеней подвижности ИУ манипуляционного робота, что, как правило, реализуется последовательным включением исполнительных приводов того или иного сустава манипулятора. Поскольку такое включение может осуществляться со специального пульта оператора (стационарного или выносного), то данный способ относится к дистанционному виду управления манипулятором. При этом в процессе управления человек-оператор как бы формирует команду на включение того или иного привода, обеспечивающего движение соответствующего звена в нужном направлении. Поэтому подобный метод получил название командного управления манипулятором. Схема системы командного управления представлена на рисунке 2.2.
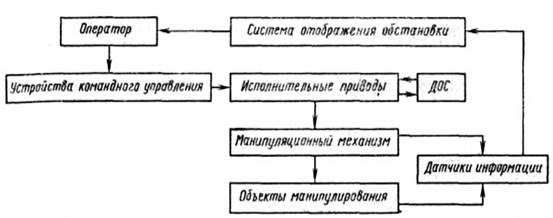
Рисунок 2.2 – Схема управления манипуляционным роботом на исполнительном уровне
Человек-оператор включает исполнительные приводы с помощью специальных устройств командного управления. Наличие датчиков обратной связи (ДОС) по частоте вращения вала двигателя в каждом из приводов позволяет обеспечить регулирование скорости движения звеньев манипуляционного механизма, а следовательно, и рабочего органа, воздействующего на объекты манипулирования.
В том случае, если оператор не имеет возможности непосредственно наблюдать за движениями рабочего органа манипулятора и его взаимодействием с объектом манипулирования, необходимо использовать информационные видеосигналы. Наибольшей эффективностью при восприятии оператором обстановки в рабочей зоне обладают телевизионные системы со стереоскопическим изображением.
Метод командного управления на исполнительном уровне наиболее удобен применительно к транспортным средствам, которые, как правило, работают в прямоугольной системе координат. Этим объясняется широкое использование командного управления и для обеспечения транспортных движений манипуляционного робота при его выводе в рабочую зону.
Командное управление оказалось весьма эффективным и при обучении промышленных роботов процессу выполнения технологических операций. Именно поэтому закономерно оснащение большинства современных промышленных роботов специальным выносным пультом дистанционного командного управления. Формирование траекторий перемещения ИУ робота с помощью подобного пульта позволяет оператору вводить в блок памяти сигналы датчиков положения по каждой степени подвижности без какого-либо дополнительного преобразования и пересчета координат.
Как правило, человек-оператор, имея в руках переносной пульт командного управления, формирует все перемещения робота, непосредственно наблюдая за его движениями. Это обеспечивает высокую точность позиционирования в процессе обучения. Однако командное управление можно осуществлять и при дистанционном наблюдении за процессом работы.
Командное управление на исполнительном уровне оказывается предпочтительным не только для обучения промышленного робота, действующего в автоматическом режиме, но и для управления его действиями в непредвиденных и особенно в аварийных ситуациях. Возникновение сложной ситуации при заклинивании деталей, поломке механизма и т. п. связано с необходимостью перехода с автоматического управления на ручное. И наиболее предпочтительным в этом случае является командное управление на исполнительном уровне. Именно ручное командное управление позволяет обеспечить быстрый вывод манипулятора из сложной ситуации и привести его в исходное положение для дальнейшей работы в автоматическом режиме.
Оснащение промышленных роботов устройствами дистанционного управления на исполнительном уровне существенным образом расширяет функциональные возможности роботов, обеспечивая возможность выполнения сложных, заранее не запрограммированных операций. Фактически такие роботы можно рассматривать как робототехнические системы с комбинированным дистанционно-автоматическим управлением. Устройства командного управления находят широкое применение в робототехнических системах, требующих максимального упрощения вычислительной аппаратуры при обеспечении ее высокой надежности.
Таким образом, командное управление, основанное на введении управляющих сигналов на исполнительном уровне позволяет считать его наиболее простым и надежным методом дистанционного управления, а также удобным способом формирования программ движения исполнительного устройства при обучении промышленного робота.
2.4 Дистанционно-автоматическое управление манипуляционными роботами
Основная задача, стоящая перед создателями манипуляционных роботов, заключается в повышении их эффективности и облегчении условий работы оператора путем автоматизации процесса управления при выполнении типовых повторяющихся операций. Ее решение во многом зависит от выбора метода управления роботом.
Требования, предъявляемые к системе управления при выполнении различных операций, достаточно противоречивы. Так, для транспортирования грузов с помощью манипулятора требуется высокая точность позиционирования захвата при движении по задаваемой оператором траектории, особенно при наличии препятствий, а для выполнения операций при силовом взаимодействии с объектом, например, при сборке, шлифовании с помощью манипулятора и т.п., необходимо, чтобы система управления обладала свойством «податливости». В ряде случаев, например при выполнении «тонких» операций, необходимо обеспечить возможность дозирования развиваемых сил и моментов в рабочем органе манипулятора.
Очевидно, что каждый из рассмотренных способов управления обладает различной эффективностью при выполнении разнообразных конкретных операций, поэтому выбор одного из них для выполнения определенных технологических операций может значительно осложнить, а иногда и сделать невозможным выполнение других. Ограниченные возможности системы управления оператор всегда вынужден компенсировать повышенным вниманием и более осторожной работой. Это неизбежно приводит к его быстрой утомляемости и существенно снижает эффективность работы всего манипуляционного робота.
Очевидно, что наиболее перспективным является применение комбинированных систем управления манипуляционным роботом, которые могут допускать возможность работы в различных режимах. Оператор выбирает тот или иной режим в зависимости от вида и условий выполняемой работы. Это может сопровождаться изменением структуры и параметров системы управления манипулятором.
Реализация таких комбинированных систем управления возможна на основе использования совершенных, как правило, микропроцессорных устройств управления. Именно развитие микропроцессорной техники позволило приступить к созданию систем управления манипуляторами, которые могут обеспечить широкие функциональные возможности робота. Применение микроЭВМ позволяет сравнительно просто реализовать дистанционные и автоматические режимы управления как по заранее введенным программам выполнения простейших операций, так и по формируемым в процессе обучения робота программам. Именно такие системы дистанционно-автоматического управления наиболее предпочтительны для выполнения сложных и нетиповых работ в изменяющихся условиях рабочей зоны.
Система управления обеспечивает связь с используемыми в манипуляционном роботе ЗУ и датчиками исполнительного механизма, переработку информации, получаемой от них, формирование управляющих сигналов на задающие и исполнительные устройства в соответствии с заложенными законами и методами управления.
Важной особенностью системы дистанционно-автоматического управления робота является возможность проведения работ в различных режимах, наиболее эффективных в конкретной ситуации. Все элементы операций, поддающиеся формализации и программированию (в том числе с простейшей адаптацией), особенно те, которые часто повторяются, выполняются роботом в автоматическом режиме с управлением от ЭВМ. Оператор в этом случае лишь наблюдает за действиями робота. Программы для автоматического режима могут быть либо составлены заранее и вызываться оператором по мере надобности, либо вводиться в память ЭВМ путем обучения робота, когда оператор с помощью ЗУ перемещает в дистанционном режиме исполнительный механизм, движение которого программируется для последующего многократного повторения в автоматическом режиме.
Запрограммированные элементы операций могут сочетаться в различных комбинациях, причем необходимая последовательность их выполнения задается каждый раз либо программным путем, либо в супервизорном режиме, когда оператор с помощью пульта управления выполняет переключение программ или вызывает целый их цикл для обеспечения запрограммированных операций (принять исходное положение, взять инструмент и прибыть в заданную точку рабочей зоны и т. п.). Затем оператор включает другую программу автоматического проведения роботом последующей операции.
Режим дистанционного управления применяется оператором в любых незапрограммированных ситуациях или в случаях отказа автоматической системы управления. При этом оператор использует ЗУ на своем пульте управления.
Принцип взаимодействия элементов системы дистанционно-автоматического управления манипуляционного робота может быть рассмотрен по схеме, представленной на рисунке 2.3.
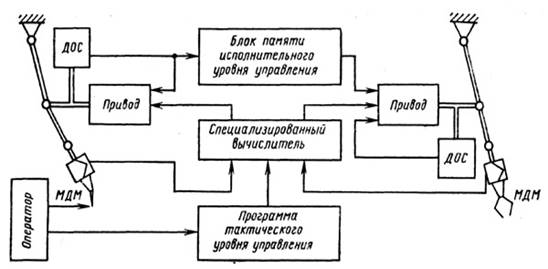
Рисунок 2.3 – Схема системы дистанционно-автоматического управления манипуляционного робота
Система включает исполнительные приводы, управляющие положением звеньев в каждой степени подвижности исполнительного манипуляционного механизма, а также ЗУ. Каждая из исполнительных систем замкнута по положению. На входы систем сигналы поступают со специализированного вычислителя-переобразователя координат. В кистевых узлах исполнительного и задающего устройств встроены многокоординатные датчики моментов МДМ, формирующие сигналы по векторам моментов, действующих со стороны оператора и объекта манипулирования.
Полуавтоматическое управление роботом может осуществляться как в позиционном копирующем режиме, так и в скоростном, а также с использованием силового очувствления. Выполнение наиболее сложных операций, не внесенных в программу автоматических режимов работы манипулятора при его взаимодействии с объектами в рабочей недетерминированной зоне, может осуществляться при копирующем управлении с силовым очувствлением. При этом сигналы многостепенных моментных датчиков сравниваются в управляющей ЭВМ.
Суммарный сигнал, обусловленный моментом оператора и нагрузочным моментом, поступает на специализированный вычислитель-преобразователь координат, который формирует управляющие воздействия на приводы каждой степени подвижности робота.
Система управления может также содержать устройства интегрирования сигналов, которые формируют сигналы управления по положению при наличии сигналов по моменту. Подобная система позволяет придать манипуляционному роботу свойства двустороннего действия, что обеспечивает наиболее эффективную работу оператора в сложных ситуациях.
При выполнении транспортных операций в свободном пространстве рабочей зоны и ряда других легко программируемых операций использование копирующего режима малоэффективно. В этих случаях применяется автоматический или полуавтоматический режим работы робота. В непредвиденных ситуациях для этого используется метод управления по разности векторов моментных воздействий со стороны оператора и со стороны нагрузки при заторможенном ЗУ. Реализация такого способа управления обеспечивается фиксацией ЗУ в исходном (наиболее удобном для оператора) положении.
Использование принципов дистанционно-автоматического управления придает манипуляционной робототехнической системе широкие функциональные возможности.
Возможно дифференцированное использование принципов дистанционно-автоматического управления для осуществления движений различными суставами ИУ манипуляционного робота. Например, транспортные движения могут иметь автоматическое, т. е. заранее запрограммированное, управляющее воздействие и осуществлять вывод кистевого узла манипулятора в заданную точку рабочего пространства. В то же время управление локальными движениями в кистевых суставах, как правило, требует учета воздействий со стороны объекта работ, поэтому такое управление рационально осуществлять в дистанционном режиме с очувствлением по значению этого силового воздействия.
Особенно актуально применение принципов комбинированного управления при выполнении сложных сборочных операций и при достаточно детерминированных условиях взаимодействия с технологической оснасткой в рабочей зоне, когда определенная податливость захвата требуется на ограниченном пространстве рабочей зоны. Совместное использование принципов автоматического и дистанционного управления дает положительный эффект при дистанционной коррекции траекторий и законов движения ИУ робота, осуществляемого в автоматическом режиме.
Действительно, если программа движений в автоматическом режиме не требует изменений, но на каком-либо отрезке траектории движения необходимо ее скорректировать, то возможно использование параллельно действующего дистанционного режима управления. Это существенно упрощает процедуру выполнения операций в изменяющихся условиях внешней среды.
С другой стороны, параллельная работа в различных режимах возможна при дистанционном управлении манипулятором, находящимся на подвижном основании. В этом случае целью автоматического управления положением рабочего органа манипулятора может быть стабилизация его положения в пространстве, причем это осуществляется управлением по каждой степени подвижности ИУ от специального информационно-измерительного устройства, определяющего отклонение конечной точки манипулятора от исходного положения, вызванного подвижностью основания. Очевидно, что это возможно лишь в ограниченном диапазоне перемещений.
Автоматическая стабилизация положения в пространстве кистевого узла манипулятора существенно упрощает режим дистанционного управления при выполнении сложной операции. Это является наиболее важным, например, при выполнении подводно-технических работ с помощью манипулятора, размещенного на подводном аппарате, который находится в так называемом состоянии зависания над объектом и испытывает воздействие течений водной среды.
Очевидно, что совместное параллельное или последовательное использование режимов дистанционного и автоматического управления требует применения вычислительной аппаратуры, способной осуществлять это сложное управление в реальном времени.
3 Методы поиска терминального управления
3.1. Вариационная постановка задачи
В работах Летова А.М. [4] терминальные задачи управления формулировались как задачи оптимизации функционала вида
 , (3.1)
, (3.1)
где W, w – некоторые неотрицательные и достаточно гладкие функции своих аргументов, а r, s – неотрицательные числа. Функции h, x описывают движение возмущенное по Ляпунову. Второе слагаемое функционала (3.1) характеризует меру отклонения систем от заданного конечного состояния в момент времени t = T.
Первое слагаемое налагает на управление дополнительное требование: помимо перевода объекта в заданное конечное состояние оно должно обеспечить ему некоторые полезные свойства. Относительно выбора вида функций W и w обычно не делается никаких строгих рекомендаций.
Если в (3.1) положить r = 0, то система оптимизируется по функционалу
![]() . (3.2)
. (3.2)
Отметим, что в случае использования функционала (3.2) задача вырождается в чисто краевую, так как единственной целью управления становится соблюдение конечных условий. В этом случае никаких дополнительных требований фазовой траектории не предъявляется.
В 1968 г. Н.Н. Красовский [5] отметили значительные трудности, возникающие при решении краевых задач в вариационной постановке. Для решения краевых задач применительно к задачам управления самолетом он предложил способ минимизации следующего функционала, который обеспечивает не только перевод объекта в заданное состояние, но и хорошее качество этого перевода
 .
.
Здесь p, q – положительные числа, удовлетворяющие соотношению ![]() , и такие, что zp, zq, – четные функции z; ki – заданные вещественные числа; V=V(X1, X2, …, Xn, t) – решение уравнения
, и такие, что zp, zq, – четные функции z; ki – заданные вещественные числа; V=V(X1, X2, …, Xn, t) – решение уравнения 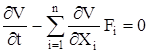 при граничном условии
при граничном условии ![]() . Полученные законы управления обеспечивали вывод самолета на взлетно-посадочную полосу (ВПП) без перерегулирования.
. Полученные законы управления обеспечивали вывод самолета на взлетно-посадочную полосу (ВПП) без перерегулирования.
Работа [6] посвящена синтезу оптимального управления для линейного объекта ![]() . Критерием качества служит функционал
. Критерием качества служит функционал
 , (3.3)
, (3.3)
минимизирующий энергетические затраты на управление.
В качестве примера решена задача вывода ракеты в течение времени T в заданную точку с координатой xf1 и конечной скоростью xf2. Управляющая функция имеет вид
 . (3.4)
. (3.4)
Здесь u – заданное ускорение объекта; T – требуемое время выполнения задачи; x1(t), x2(t) – текущие значения координаты и скорости объекта; xf1, xf2 – конечные значения координаты и скорости.
Полученный закон управления является замкнутым и переводит объект в течение времени T из произвольной начальной точки фазовой плоскости в произвольную конечную. Однако этот закон обладает особенностью в конечной точке: при t = T знаменатель в (3.4) обращается в нуль. Эта особенность закона затрудняет его практическое применение.
Описанное в приведенных работах направление базируется на теории оптимизации квадратичных функционалов. Ввиду этого все рассмотренные подходы отличает повышенная трудность решений. В тоже время в постановках задач отмечаются следующие особенности. У большинства авторов невязки по фазовым координатам в конечный момент времени T включены в функционал. Зачастую кроме этих невязок функционал ничего другого не содержит. Следовательно, в этих случаях достигается единственная цель – перевод объекта в конечное фазовое состояние. Никакие дополнительные требования к фазовой траектории не предъявляются. Таким образом, сложные вариационные методы применяются здесь лишь как средство решения краевой задачи.
В большинстве рассмотренных работ управляемый объект переводится в начало координат фазового пространства. Так как при этом заданные конечные значения фазовых координат равны нулю, то в окончательные выражения для управлений они не входят. Нужно особо подчеркнуть, что перевод фазовой точки в начало координат или в произвольную точку фазового пространства – не одно и то же. Конечные значения фазовых координат входят в формулы для управлений со своими весовыми коэффициентами (3.4) и определение этих коэффициентов является составной частью задачи синтеза.
В некоторых работах требуется в течение заданного времени Т < Tопт перевести фазовую точку на возможно близкое расстояние к началу координат. Так как в этом случае конечное фазовое состояние объекта неизвестно, то оно также не входит в окончательные формулы.
Найденные оптимальные управления, как правило, принадлежат классу кусочно-непрерывных функций времени, мгновенно переключающихся с одного ограничения на другое.
Таким, образом, построенные на этой основе САУ не имели, бы обратных связей и не могли бы противодействовать внешним возмущениям. Кроме того, переключательные управляющие функции недопустимы для значительного числа управляемых объектов из соображений безопасности, прочности и т.д. По этой причине они не нашли достаточного практического применения в технике.
Оценивая данное направление в целом, следует заключить, что оно не дало пока приемлемых для инженерной практики решений. И может быть применено лишь в некоторых ограниченных случаях.
3.2 Чисто терминальная постановка задачи
Как указывалось выше, вариационная постановка задачи поиска терминального управления используется лишь с единственной целью – свести эту задачу к известному классу и применить достаточно разработанный, хотя и сложный метод решения.
Очевидно, что в этих случаях вариационный метод используется лишь как инструмент для решения краевой задачи. При наличии простых специальных методов решения краевых задач от вариационной постановки можно было бы отказаться ввиду математических сложностей, к которым она приводит. Вариационные методы должны использоваться там, где они действительно необходимы.
Иное направление в решении терминальной проблемы дает поиск управлений в заданном классе непрерывных функций или поиск управлений, реализующих заданное движение системы.
Невариационный, или чисто терминальный, подход был впервые предложен Грином в 1961 г. для управления мягкой посадкой космического аппарата [7]. Поиск управления, представляющего собой заданное ускорение объекта, производился в классе постоянных во времени функций u = Со, которые реализуют равномерно замедленное движение. При переходе к замкнутой форме этот закон принимает вид
![]() , (3.5)
, (3.5)
где u – заданное ускорение аппарата; V – текущая вертикальная скорость аппарата; R – оставшееся до посадочной площадки расстояние. Однако этот закон имеет существенный недостаток: в момент приземления знаменатель в (3.5) обращается в нуль. Если устранить эту особенность в конечной точке, то закон примет вид
![]() . (3.6)
. (3.6)
Требуемое время выполнения задачи в закон (3.6) не входит, поэтому он разомкнут по времени. Следовательно, время перевода объекта из начальной точки в конечную задавать нельзя. Однако его можно вычислить по формуле
![]() , (3.7)
, (3.7)
где ![]() и
и ![]() – соответственно начальное и конечное фазовые состояния объекта.
– соответственно начальное и конечное фазовые состояния объекта.
Закон управления (3.4), реализующий движение с линейно-изменяющимся ускорением,
![]() (3.8)
(3.8)
был получен в [8] и использовался для посадки вертикально взлетающего самолета.
Необходимо подчеркнуть, что этот закон получен не путем минимизации функционала (3.3), а совершенно иным методом. Управление искалось в классе линейных функций (3.8), а неизвестные коэффициенты Со и С1 определялись из конечных условий.
Закону (3.4) также присуща особенность в конечной точке: при t = Т его знаменатель обращается в нуль. В [9] предложен способ устранения особенности, реализующий погоню управляемого объекта за ведущей фазовой точкой на постоянном временном интервале. В результате (3.4) преобразуется к виду
![]() , (3.9)
, (3.9)
где коэффициенты k0, k1, k2, k3 зависят от начального и конечного фазовых состояний объекта, а также заданного времени перехода Т; коэффициенты kx1, kx2 зависят от временного интервала DТ; x1, x2, t – текущие значения фазовых координат объекта и времени, отсчитываемые с начала момента движения.
Закон (3.9) является замкнутым по времени, так как позволяет задавать требуемое время перевода объекта из начального состояния в конечное.
Оценивая в целом описанное в данном разделе направление, следует отметить присущую ему простоту алгоритмов и методов.
3.3 Синтез терминального управления, реализующего заданное движение системы
В [2] описана методика расчета терминальных управлений в заданном классе функций. В соответствии с этой методикой управляющая функция с некоторыми неизвестными параметрами подается на вход управляемого объекта, структурная схема которого в простейшем случае может быть представлена в виде цепочки интеграторов. В результате последовательного интегрирования входной функции находится выражение для выходной функции, в которое войдут все неизвестные параметры входной функции. Из конченых условий, наложенных на выходную функцию, определяются значения неизвестных параметров управления. Очевидно, что решение будет однозначным, если число неизвестных параметров и число конечных условий равны.
При несложных структурных схемах объектов интегрирование с целью получения выражения для выходной функции не представляет труда и метод синтеза управлений достаточно прост. Однако на практике зачастую приходится иметь дело с довольно сложными объектами с нелинейностью в прямом и обратном каналах и внутренними обратными связями, замыкающимися не обязательно на вход системы. В этом случае получение выражения для выходной функции представляет собой значительную сложность. Для решения этой проблемы Батенко предложено выходную функцию не искать, а задавать. Вначале определяются из конечных условий ее неизвестные параметры, а затем, при движении по структурной схеме справа налево и последовательном дифференцировании выходной функции, получают управляющую функцию, приложенную к входу.
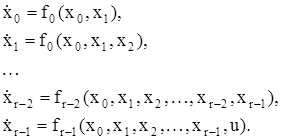
Предположим, что движение управляемого объекта r-го порядка описывается уравнением [2]
![]() . (3.10)
. (3.10)
Его выходной функцией служит x(t), а управляющей u(t). Будем задавать желаемое движение объекта в классе непрерывных r раз дифференцируемых функций. Согласно теореме Вейерштрасса о приближении любая непрерывная функция может быть аппроксимирована полиномом с любой наперед заданной точностью. Поэтому в качестве функции, задающей требуемое движение, может быть выбран полином от времени следующего вида
 , (3.11)
, (3.11)
который содержит r+n неизвестных параметров Ci. Здесь r – число начальных, а n–число конечных условий; из этих условий однозначно определяются параметры полинома (3.11).
Выбор полиномов в качестве класса функций, задающих требуемое движение объекта, имеет следующие преимущества. При любых линейных преобразованиях полином остается полиномом, изменяется только его степень. Его неизвестные параметры Ci определяются в результате решения алгебраических уравнений, кроме того, эти коэффициенты могут быть определены с помощью рекуррентных соотношений, приведенных ниже.
Рассмотрим вначале простейший класс управляемых объектов – цепочку интеграторов r-го порядка. Этот объект замечателен тем, что его фазовыми координатами служат выходная функция и r-1 ее производных. Все соотношения, которые будут получены для цепочки интеграторов, найдут применение и для объектов произвольной структуры.
Движение объекта, составленного из r последовательно включенных интеграторов, описывается следующей системой дифференциальных уравнений:
 . (3.12)
. (3.12)
Требуется найти такое управление u, которое переводит объект в течение времени Т из начального фазового состояния ![]() в конечное, обеспечивая выполнение n конечных условий
в конечное, обеспечивая выполнение n конечных условий ![]() .
.
Неизвестные параметры Ci выходной функции (3.11) находятся из граничных условий на левом (t = 0) и правом (t = T) концах фазовой траектории.
Последовательно дифференцируя выходную функцию (3.11), находим выражения для фазовых координат:
 . (3.13)
. (3.13)
Подставив в выражение (3.13) t = 0, из начальных условий определим первые r неизвестных параметров:
 , (3.14)
, (3.14)
где ![]() – начальные значения выходной функции и ее производных.
– начальные значения выходной функции и ее производных.
Остальные n параметров находятся решением системы уравнений (3.13), записанной для конечного момента времени t = T:
 . (3.15)
. (3.15)
Для подсчета неизвестных параметров управления рекомендуется пользоваться рекуррентной формулой, боле приспособленной для машинной реализации:
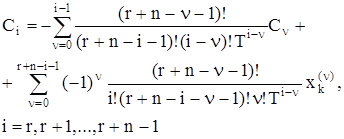 . (3.16)
. (3.16)
Первые r параметров Ci (i = 0,1, … , r-1), вычисляются по (3.14). Их значения входят в первое слагаемое (3.16).
Как было отмечено выше описанная методика синтеза терминального управления для систем, математическая модель которых может быть представлена в виде цепочки интеграторов. Далее будет рассмотрен метод, который позволяет синтезировать терминальные управления для линейных и нелинейных объектов произвольной структуры.
Данный метод носит название синтез терминальных управлений методом пересчета краевых условий. Основная идея метода состоит в следующем: краевые условия по внутренним фазовым координатам пересчитываются в краевые условия для выходной функции объекта. После этого синтез терминального управления производится в соответствии с методом, описанным выше.
Пусть движение объекта описывается системой дифференциальных уравнений
 . (3.17)
. (3.17)
Здесь r – порядок системы; ![]() – непрерывные функции от фазовых координат; u – управляющая функция.
– непрерывные функции от фазовых координат; u – управляющая функция.
Требуется найти управление u(t), ![]() , переводящее объект в течение заданного времени T из начального фазового состояния
, переводящее объект в течение заданного времени T из начального фазового состояния ![]() в конечное, обеспечив при этом выполнение следующих граничных условий на правом конце фазовой траектории:
в конечное, обеспечив при этом выполнение следующих граничных условий на правом конце фазовой траектории: ![]() . В конечный момент времени T необходимо обеспечить заданные значения r фазовым координатам и их производным, причем порядок производных s не ограничен.
. В конечный момент времени T необходимо обеспечить заданные значения r фазовым координатам и их производным, причем порядок производных s не ограничен.
Синтез управления начинается с задания выходной функции
 . (3.18)
. (3.18)
Подставим (3.18) в первое уравнение системы (3.17), найдем из него
![]() . (3.19)
. (3.19)
Далее произведем подстановку (3.18) и (3.19) во второе уравнение системы (3.17), получим
![]() . (3.20)
. (3.20)
В результате r-1 последовательных подстановок найдем выражения всех внутренних фазовых координат объекта ![]() через выходную координату
через выходную координату ![]() и ее производные. Из последнего уравнения системы (3.17) находится управляющая функция
и ее производные. Из последнего уравнения системы (3.17) находится управляющая функция
![]() . (3.21)
. (3.21)
Уравнения (3.19), (3.20) и им подобные для остальных фазовых координат дают связь между значениями внутренних фазовых координат ![]() и выходной фазовой координатой
и выходной фазовой координатой ![]() и ее производными
и ее производными ![]() . Поэтому найдем из этих уравнений выражения для производных выходной фазовой координаты через внутренние фазовые координаты:
. Поэтому найдем из этих уравнений выражения для производных выходной фазовой координаты через внутренние фазовые координаты:
 . (3.22)
. (3.22)
Переписывая (3.22) для начального (t = 0) и конечного моментов времени (t = T), получаем формулы для вычисления граничных значений производных выходной функции. Если найти такую управляющую функцию, которая обеспечит вычисленные по (3.22) граничные значения выходной функции и ее производных, то в силу однозначного соответствия этих значений граничным значениям внутренних фазовых координат будут также обеспечены и их краевые условия. Таким образом, выражения (3.22) служат для пересчета краевых условий по внутренним фазовым координатам на выход объекта. Параметры ![]() выходной функции (3.18), входящие также в управляющую функцию (3.21), вычисляются на основании пересчитанных на выход краевых условий по формулам (3.14) и (3.16).
выходной функции (3.18), входящие также в управляющую функцию (3.21), вычисляются на основании пересчитанных на выход краевых условий по формулам (3.14) и (3.16).
В заключение обратим внимание на следующее. Пусть существует задача терминального управления всеми фазовыми координатами объекта r-го порядка с внутренними обратными связями. Граничные условия, наложенные на его фазовые координаты, однозначно определяют начальные и конечные значения выходной координаты r-1 ее производных. Поэтому свободно распоряжаться граничными значениями выходной функции, если это потребуется, можно только начиная с ее r-й производной и выше.
Таким образом, методика, описанная в данном разделе, является универсальной и может использоваться как для линейных, так и для нелинейных объектов. Ограничение применения данного подхода состоит в том, что входящие в систему нелинейности должны описываться аналитическими функциями. В этом случае терминальное управление будет также аналитической функцией.
4 Концепция распределенной системы терминального управления робототехническим комплексом
4.1 Общая концепция РСТУ робототехническим комплексом
В соответствии с постановкой задачи, изложенной в разделе 1, разработаем общую концепцию распределенной системы терминального управления робототехническим комплексом, оперирующем в зоне радиоактивного заражения. Возможная концепция построения РСТУ представлена на рисунке 4.1. Рассмотрим ее более подробно.
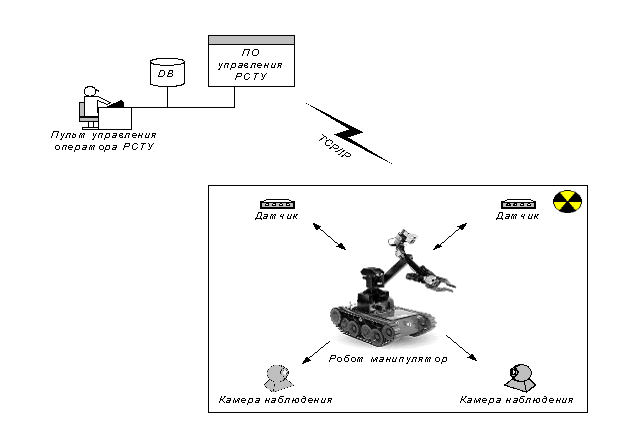
Рисунок 4.1 – Обобщенная концепция РСТУ робототехническим комплексом
Управление комплексом осуществляется из пункта управления, находящегося на расстоянии, достаточном для обеспечения безопасной работы оператора пульта РСТУ. Все команды управления и мониторинг работы РСТУ оператор выполняет с помощью специализированного программного обеспечения. Оператору достаточно ввести необходимые параметры функционирования системы и выбрать кнопку, соответствующую необходимому режиму функционирования системы. Пакет управляющей информации передается по каналу связи на управляемый объект, который в течение заданного времени отрабатывает заданные ему команды. Для определения параметров окружающей среды и другой полезной информации, имеющей ценность для рассматриваемой РСТУ, предусмотрена система измерительных датчиков, информация от которых поступает в пункт управления по каналам связи. Собранная информация проходит процедуру обработки, после чего производится ее анализ. Необходимые данные передаются в программу управления РСТУ для расчета терминального управления, а часть измеренной информации записывается в файл протокола или заносится в базу данных.
4.2 Концепция системы передачи управляющих команд
Для создания системы передачи управляющих команд роботу манипулятору предлагается использовать CAN-интерфейс [11, 12]. Сетевой интерфейс CAN (Controller Area Network) был разработан в 1987 г. (версия 1.0) фирмами BOСSH и INTEL для создания бортовых мультипроцессорных систем реального времени. Стандарт на этот CAN интерфейс предусматривает последовательный интерфейс связи со скоростью передачи данных до 1 Мбит/с, который эффективно поддерживает распределенное управление в реальном масштабе времени с высокой помехозащищенностью, что весьма важно при построении проектируемой системы.
Основой системы являются программируемые контроллеры, оснащенные соответствующими устройствами ввода/вывода, что обеспечивает снятие информации с различных датчиков на объекте (или объектах) управления с последующей её обработкой по заложенному алгоритму и выдачей соответствующих управляющих воздействий. Контроллеры объединены посредством сети. В качестве узла сети может выступать как программируемый контроллер, так и персональный компьютер, подключенный через соответствующий адаптер. В частности, информация о ходе технологического процесса, управляемого автономными контроллерами, может быть передана в цифровом виде по сети и обработана на ПК оператора для удобного представления.
Достоинством сети является сокращение длины аналоговых линий связи, т.к. управляющий контроллер может быть размещен в непосредственной близости от объекта управления. Цифровая линия CAN сети представляет собой витую пару, информация по которой передается дифференциальным сигналом, что обеспечивает большую устойчивость к электромагнитным помехам (помеха наводится на оба скрученных провода, соответственно, разность потенциалов в них остается неизменной).
Перечислим основные достоинства стандарта CAN:
- Протокол CAN оптимизирован для систем, в которых должны передаваться относительно небольшое количество информации (по сравнению с Ethernet или USB, разработанных специально для больших объемов данных) к любому или всем узлам сети. Множественный доступ с опросом состояния шины позволяет каждому узлу получить доступ к шине с учетом приоритетов.
- Неадресатная структура сообщений позволяет организовать многоабонентскую доставку данных с сокращением трафика шины.
- Протокол CAN использует оригинальную систему адресации сообщений. Каждое сообщение снабжается идентификатором, который определяет назначение передаваемых данных, но не адрес приемника. Любой приемник может реагировать как на один идентификатор, так и на несколько. На один идентификатор могут реагировать несколько приемников.
- Быстрая устойчивая передача информации с системой контроля ошибок позволяет отключать неисправные узлы от шины, что гарантирует доставку критических по времени сообщений.
- Максимальное число абонентов, подключенных к данному интерфейсу фактически определяется нагрузочной способностью примененных приемопередатчиков (теоретических ограничений нет). Например, при использовании трансивера фирмы PHILIPS PCA82C250 она равна 110.
- Протокол CAN обладает развитой системой обнаружения и сигнализации ошибок. Для этих целей используется поразрядный контроль, прямое заполнение битового потока, проверка пакета сообщения CRC-полиномом, контроль формы пакета сообщений, подтверждение правильного приема пакета данных. Общая вероятность необнаруженной ошибки составляет ![]() .
.
- В качестве среды передачи данных могут выступать: витая пара (различных категорий) при передаче дифференциальных электрических сигналов (в этом случае для повышения помехозащищенности необходимы терминаторы – 120-омные резисторы – на концах шины); оптоволокно; радиоволны; инфракрасные лучи.
В качестве управляющего контроллера CAN-интерфеса может быть использован MCP2510 контроллер фирмы Microchip.
4.3 Концепция специализированного ПО РСТУ
Как было сказано выше, для эффективного управления РСТУ необходимо специализированное клиентское ПО, среди основных функций которого можно выделить:
- общий мониторинг обстановке в зоне работы роботехнического комплекса;
- анализ информации, поступающей от датчиков;
- синтез закона терминального управления для объекта управления;
- ведение файлов протокола работы системы;
- общее управление комплексом.
Поскольку ПО должно поддерживать возможность передачи данных по сети с использованием протокола TCP/IP будем использовать технологию создания сетевых приложений с использованием сокетов. Файлы протоколов будут формироваться на основе типизированных файлов. Для визуализации информации рекомендуется использовать стандартные интерфейсные элементы операционной системы Windows, это снизит потребление аппаратных ресурсов компьютера, что в свою очередь позволит поднять быстродействие программного обеспечения.
5 Разработка экспериментальной модели РСТУ робототехнического комплекса
5.1 Назначение экспериментальной модели РСТУ
Для проверки работоспособности проектируемой РСТУ робототехнического комплекса необходимо построить экспериментальную модель системы, которая будет в состоянии сымитировать работу РСТУ в реальных условиях. Основное назначение экспериментальной модели состоит в проверке синтезированных алгоритмов терминального управления.
5.2 Построение экспериментальной модели
Основная задача при разработки модели будет состоять в моделировании исполнительной системы робота, поскольку закон терминального управления будет рассчитываться именно для этой подсистемы робототехнического комплекса. Наибольшее распространение в робототехнике получили электрические приводы на основе двигателей постоянного тока аналогового типа [1]. Однако широкое использование управляющей вычислительной техники и в первую очередь микропроцессорных систем приводит к необходимости решения задачи создания систем сопряжения аналоговых и цифровых сигналов и разработки силовых управляющих преобразователей. Для управления двигателями робота наиболее целесообразно использование сигнала с широтно-импульсной модуляцией, что обеспечивает самый экономичный режим работы усилителя – импульсный и позволяет упростить канал вывода информации от управляющей ЭВМ.
Одно из важнейших требований, предъявляемых к исполнительным системам роботов манипуляторов, заключается в необходимости обеспечения высокой степени их надежности. Выполнение этого требования особенно важно в отношении дистанционно управляемых манипуляционных роботов, предназначенных для работы в экстремальных условиях, так как агрессивная внешняя среда оказывает существенное влияние на конструктивные элементы манипулятора. Самым уязвимым с этой точки зрения звеном исполнительной системы является электродвигатель. Наибольшей степенью надежности в агрессивных средах обладают электродвигатели, в конструкциях которых отсутствуют контактные коммутационные элементы. Одной из разновидностей таких двигателей является трехфазный электродвигатель переменного тока с короткозамкнутым ротором. Указанные обстоятельства и целый ряд других существенных преимуществ асинхронных электродвигателей вызывают в последнее время повышенный интерес разработчиков к созданию и широкому внедрению исполнительных систем на основе этих двигателей. Синтез и исследование таких систем имеют свою специфику. Рассмотрим в общем виде инженерный подход к проектированию исполнительных следящих систем с асинхронным короткозамкнутым двигателем.
При выводе дифференциальных уравнений асинхронной машины обычно принимают следующие допущения: фазные обмотки ротора выполнены одинаковыми и расположены по окружности статора симметрично, воздушный зазор равномерен, машины имеют синусные обмотки, и поле в воздушном зазоре определяется формой приложенного напряжения, поверхность ротора и статора считается гладкой, потери в стали не учитываются. Кроме того, при исследовании асинхронного двигателя, питающегося от преобразователя частоты, не учитывается влияние высших гармоник питающего напряжения на работу машины. В системе координат, вращающейся с произвольной скоростью ![]() , дифференциальные уравнения имеют вид [13]
, дифференциальные уравнения имеют вид [13]
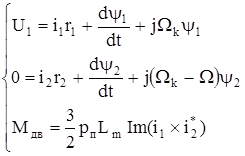 , (5.1)
, (5.1)
где U1
, i1
, i2
, – вращающиеся векторы мгновенных значений напряжения статора и токов ротора соответственно; r1
, r2
– активные сопротивления обмоток статора и ротора; y1
, y2
– вращающиеся векторы мгновенных значений потокосцеплений статора и ротора соответственно; Lm
– взаимная индуктивность статора и ротора; Мдв
– вектор электромагнитного момента двигателя; ![]() – величина, комплексно сопряженная i2
; W – угловая скорость ротора; рп
– число пар полюсов.
– величина, комплексно сопряженная i2
; W – угловая скорость ротора; рп
– число пар полюсов.
В литературе приводятся структурные схемы двигателя, полученные на основе его дифференциальных уравнений. Однако техническая реализация системы управления на базе таких структур оказывается сложной, поэтому целесообразно определить передаточную функцию двигателя, предварительно исследовав экспериментально либо рассчитав на ЭВМ переходные процессы в нем.
5.3 Численное моделирование и анализ исполнительной системы робота манипулятора
При анализе исполнительных систем в полной мере проявляется современная тенденция – детализированный учет свойств каждого элемента системы при математическом описании – обусловленная в первую очередь тем, что ряд параметров систем управления и их элементов изменяется в процессе работы. В связи с этим широко используется отображение систем дифференциальных уравнений, описывающих системы управления, в виде математических структурных схем. Будем рассматривать структурную схему исполнительной системы в виде

Рисунок 5.1 – Структурная схема исполнительной системы
На схеме приняты следующие обозначения: ![]() – момент инерции ротора двигателя и кинематической передачи;
– момент инерции ротора двигателя и кинематической передачи; ![]() – момент инерции нагрузки;
– момент инерции нагрузки; ![]() – угол поворота вала двигателя;
– угол поворота вала двигателя; ![]() – угол поворота вала нагрузки;
– угол поворота вала нагрузки; ![]() – коэффициент упругости кинематической передачи;
– коэффициент упругости кинематической передачи; ![]() – коэффициент, учитывающий потери на деформацию;
– коэффициент, учитывающий потери на деформацию; ![]() – активное сопротивление цепи якоря;
– активное сопротивление цепи якоря; ![]() – индуктивность цепи якоря;
– индуктивность цепи якоря; ![]() – коэффициент противо-ЭДС;
– коэффициент противо-ЭДС; ![]() – коэффициент крутящего момента;
– коэффициент крутящего момента; ![]() ,
, ![]() ,
, ![]() – коэффициенты звена последовательной коррекции.
– коэффициенты звена последовательной коррекции.
При численном моделировании исполнительной системы был использован пакет Matlab с подсистемой имитационного моделирования Simulink. При моделировании были приняты следующие значения параметров исполнительной системы: ![]() = 1,5;
= 1,5; ![]() = 0,12;
= 0,12; ![]() = 0,002;
= 0,002; ![]() = 0,02;
= 0,02; ![]() =0,004;
=0,004; ![]() = 0,4;
= 0,4; ![]() = 0,001;
= 0,001; ![]() = 0,2;
= 0,2; ![]() = 10;
= 10; ![]() = 0,001;
= 0,001; ![]() = 0,2.
= 0,2.
Реакция системы на единичный скачок представлена на рисунке 5.2.
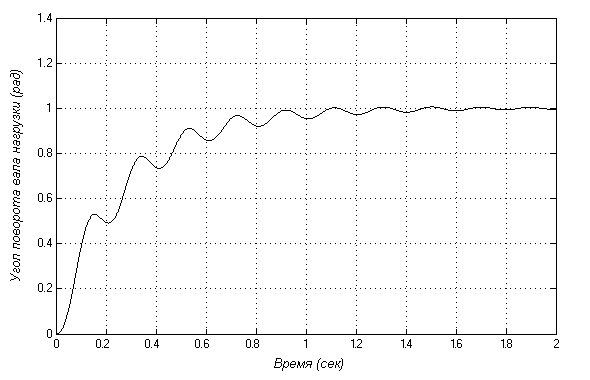
Рисунок 5.2 – Реакция исполнительной системы на единичный скачок
В соответствии с методикой, изложенной в разделе 3, проведем расчет терминального управления. Для этого воспользуемся функцией, реализующей вычисление коэффициентов терминального управления в соответствии с соотношением (3.16). Исходный текст функции приведен в приложении А. Вид управления, которое необходимо подать на вход исполнительной системы определяется соотношением
![]() . (5.1)
. (5.1)
Графическая зависимость управляющей функции от времени приведена на рисунке 5.3, а реакция системы на это управление на рисунке 5.4.
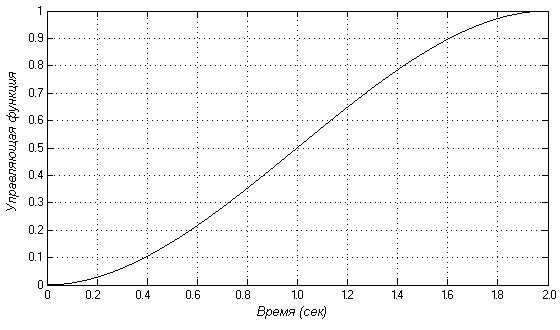
Рисунок 5.3 – Управляющая функция
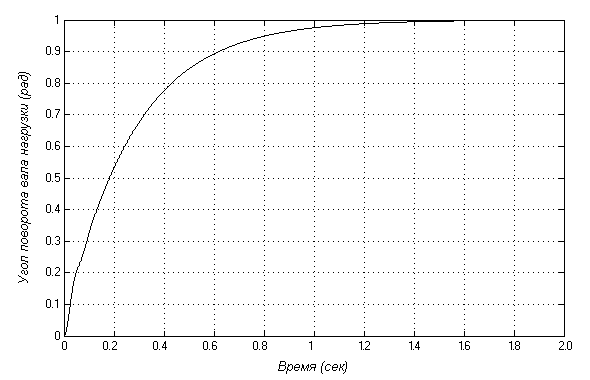
Рисунок 5.4 – Реакция исполнительной системы на управляющую функцию
Сравнивая результаты моделирования, представленные на рисунке 5.2 и 5.4 можно сделать заключение о том, что синтезированное терминальное управление позволило улучшить выходную характеристику исполнительной системы робота манипулятора.
6 Разработка программного обеспечения системы терминального управления техническим объектом
В соответствии с концепцией распределенной системы терминального управления робототехнического комплекса, изложенной в разделе 4, в состав РСТУ входит специализированное программное обеспечение пульта управления РСТУ, выполняющее управление всем комплексом.
6.1 Выбор среды разработки
Язык программирования, на котором будет реализовываться специализированное ПО пульта управления РСТУ должен отвечать следующим требованиям [14, 15]:
- давать возможность работать с массивами данных;
- выполнять различные математические функции;
- возможность визуализации расчетных данных
- давать достаточно простой способ для создания приложений под Windows.
Поэтому в качестве языкового средства выбираем продукт фирмы Borland язык программирования высокого уровня BorlandC++, который является одной из самых популярных систем разработки математического обеспечения. Система предоставляет в распоряжение программиста высокопродуктивные средства разработки 16- и 32-разрядных приложений для операционных систем Windows 95/98, WindowsNT и DOS. Модифицированные библиотеки ObjectWindowsLibrary (OWL) и MicrosoftFoundationClasses (MFC), а также инструменты VisualDatabaseTools (VDBT) для визуальной разработки эффективных приложений баз данных выводят BorlandC++ на новый качественный уровень систем объектно-ориентированного программирования.
При создании приложения для Windows на языке C++, значительное количество времени приходится уделять созданию пользовательского интерфейса, что затрудняет работу и мешает решению основной математической задачи. Чтобы устранить этот недостаток, в качестве среды программирования предлагается использовать систему визуальной разработки приложений RapidApplicationDevelopment (RAD) C++ Builder.
Данный продукт вышел на рынок в 1997 году и уже успел завоевать огромную популярность среди программистов. Перечислим наиболее важные достоинства С++ Builder [15]:
- система имеет удобную визуальную среду, которая обеспечивает разработку приложений из компонентов и поддерживает двунаправленное проектирование (изменения, сделанные в визуальной среде, отражаются на исходном коде программы, а изменение кода отражается в визуальной среде);
- в состав системы входит библиотека визуальных компонентов – VisualComponentLibrary (VCL), ставшую стандартом при создании Windows приложений; существует возможность расширения этой библиотеки компонентами, разрабатываемыми программистом, а также готовыми ActiveX-компонентами сторонних разработчиков;
- С++ Builder содержит в своей основе мощный объектно-ориентированный язык C++, обогащенный новыми синтаксическими конструкциями и понятиями;
- быстрый и надежный компилятор позволяет получать максимально оптимизированные программы;
- интегрированный отладчик с возможностью трассировки программы на уровне машинных команд дает возможность быстро находить ошибки в тексте программы;
- поддержка работы с базами данных, поддерживающих архитектуру клиент-сервер.
Перечисленные выше возможности среды дают основание полагать, что C++ Builder может быть эффективно использован при создании программного обеспечения для РСТУ робототехническим комплексом.
6.2 Функциональные возможности ПО РСТУ
Разрабатываемое ПО должно обеспечивать выполнение следующих функций:
- расчет коэффициентов терминального управления;
- отправку информационных объектов роботу манипулятору;
- ведения файла протокола работы РСТУ;
- выполнять визуализацию расчетных данных.
6.3 Требования к персональной ЭВМ
Для оптимальной работы разрабатываемого программного обеспечения к ПЭВМ предъявляются следующие требования:
- процессор класса Intel Pentium/Celeron с тактовой частотой не менее 1 ГГц;
- объем оперативной памяти не менее 256 Мб;
- объем жесткого диска не менее 20 Гб;
- объем видеопамяти не менее 32 Мб;
- наличие сетевой платы, обеспечивающей пропускную способность 100 Мбит в секунду.
Для возможности модифицирования программы необходимо наличие установленной системы визуального программирования BorlandC++ Builder 6.0.
6.4 Руководство пользователя
Программное обеспечение РСТУ представляет собой исполняемый файл RSTUPult.exe. Компиляция программы осуществлена таким образом, что для нормальной работы программы не требуется никаких дополнительных библиотек, достаточно стандартного набора библиотечных функций, входящий в стандартную поставку операционной системы Windows. После запуска программы на выполнение, открывается главное окно приложения, внешний вид которого представлен на рисунке 6.1.
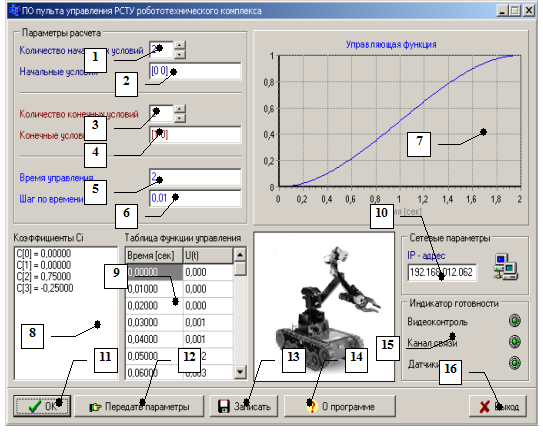
Рисунок 6.1 – Главное окно приложения RSTUPult
Далее описывается элементов управления, расположенных на главной форме приложения.
1 – Инкрементное поле для ввода количества начальных условий.
2 – Поле для ввода начальных условий.
3 – Инкрементное поле для ввода количества конечных условий.
4 – Поле для ввода конечных условий.
5 – Поле ввода времени, за которое объект управления должен перейти из заданного начального в заданное конечное положение.
6 – Поле ввода шага по оси времени для расчета управляющей функции.
7 – Поле для графического представления управляющей функции.
8 – Поле списка с значением коэффициентов терминального управления.
9 – Поле для табличного представления интегральной функции.
10 – Поле ввода IP-адреса получателя информационной посылки.
11 – Кнопка ввода исходных параметров для синтеза управления, расчета терминальных коэффициентов, заполнения таблиц данными.
12 – Кнопка формирования и передачи информационного пакета по заданному IP адресу.
13 – Кнопка формирования и записи файла протокола.
14 – Кнопка вывода вспомогательной информации о создателях программы.
15 – Индикатор готовности подсистем мониторинга и передачи информации.
16 – Кнопка закрытия программы.
Первое, что необходимо сделать оператору РСТУ, это ввести все необходимые параметры для расчета коэффициентов терминального управления. Необходимо следить за тем, чтобы введенное число параметров соответствовало их действительному наличию в поле ввода. В противном случае программа генерирует сообщение об ошибке и просит повторить ввод информации. Также необходимо задать время переход из одного граничного состояния в другое и шаг по временной шкале, для построения управляющей функции. После того как введены указанные выше параметры, можно осуществить нажатие на кнопку Ок. После этого происходит вызов соответствующих функций и вывод расчетных значений пользователю. Рассчитанные коэффициенты терминального управления должны быть переданы в микропроцессорную систему робота манипулятора. Это осуществляется нажатием на кнопку «Передать параметры». Однако при этом следует иметь в виду, что поле «IP-адрес» главного окна приложения должно содержать адрес робота манипулятора, а ПЭВМ пульта управления подключено к сети. В противном случае будет сгенерировано окно сообщения вида
Рисунок 6.2 – Окно сообщения об ошибке
Если окно, изображенное на рисунке 6.2 не появилось, значит, пакет успешно доставлен на борт робота. Вся расчетная информация может быть записана в файл протокола, по желанию пользователя. Для этого нужно нажать на кнопку «Записать». Пользователю будет предложено ввести имя файла, в который будет записан протокол команд. После ввода имени файла протокола программа автоматически генерирует протокол и записывает его в файл. Пример файла протокола приведен ниже:
Файл протокола от 05.06.2005
C[0] = C[0] = 0,00000
C[1] = C[1] = 0,00000
C[2] = C[2] = 0,75000
C[3] = C[3] = -0,25000
Время [сек] U(t)
0,00000 0,000
0,01000 0,000
0,02000 0,000
0,03000 0,001
0,04000 0,001
0,05000 0,002
0,06000 0,003
0,07000 0,004
0,08000 0,005
0,09000 0,006
0,10000 0,007
0,11000 0,009
0,12000 0,010
0,13000 0,012
0,14000 0,014
0,15000 0,016
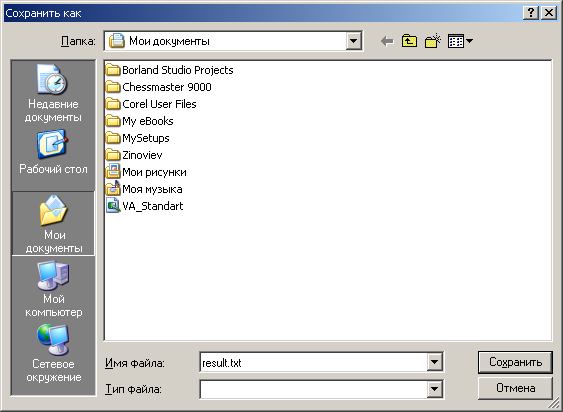
Рисунок 6.3 – Диалоговое окно ввода имени файла протокола
Для вывода информации о разработчика данного программного обеспечения необходимо нажать кнопку «О программе». В результате появляется окно с краткой информацией об авторах.

Рисунок 6.4 – Диалоговое окно информации о программе
6.5 Описание основных функций
Схема алгоритмов, описывающих поведения каждой из приведенных ниже функций, приведены на чертежах. Исходные тексты функций представлены в приложении А
void __fastcallTForm1::bOkClick(TObject *Sender) – Функция-обработчик нажатия на кнопку Ок.
void __fastcallTForm1::FormCreate(TObject *Sender) – Функция инициализирующая вспомогательные параметры при создании приложения.
void __fastcallTForm1::bbSaveClick(TObject *Sender) – Функция-обработчик нажатия на кнопку «Сохранить».
void __fastcallTForm1::bbSendClick(TObject *Sender) – Функция-обработчик нажатия на кнопку «Передать параметры».
doubleFactorial(intn) – Функция вычисления факториала. Входной парамет n – порядок факториала. Выходное значение – n!
double *CoeffC(doubleXo[], intr, doubleXk[], intn, doubleTk) – Функция расчета коэффициентов терминального управления. Входные параметры: Xo – указатель на вещественный массив начальных условий, r – количество начальных условий, Xk – указатель на вещественный массив конечных условий, n – количество конечных условий, Tk – значение времени опережения. Выходной параметр функции – указатель на массив коэффициентов терминального управления.
7 ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОБОСНОВАНИЕ ДИПЛОМНОГО ПРОЕКТА
7.1 Маркетинговые исследования проектируемого продукта
Маркетинговый анализ производится с целью выявления потребительской ценности продукта, портрета потребителя, предполагаемого сегмента рынка сбыта, степени рыночной направленности, конкурентоспособных параметров и жизненного цикла разработанного программного продукта (ПП).
Данный программный продукт предназначен для терминального управления техническим объектом (робототехническим комплексом).
7.1.1 Потребительская ценность продукта
Для выявления потребительской ценности ПП применяется товарная характеристика трех уровней: товар по замыслу, товар в реальном исполнении и товар с подкреплением. Замысел заключается в разработке программного обеспечения для терминального управления техническим объектом. Разработчик реализовал замысел в товар в реальном исполнении. Он разработал программу, которая обладает интерфейсом, удобным и простым в обращении, т. к. не имеет скрытых настроек, наглядностью за счет графического представления результатов; имеет систему защиты от некорректного ввода чисел и других возможных ошибок. Товар с подкреплением включает в себя установку данного ПП, в случае возникновения неисправностей, устранение их.
7.1.2 Портрет потребителя
Предпочтительным потребителем ПП является специализированный отдел предприятия, занимающийся научными исследованиями, разработками. Предприятие платежеспособное, требующее уникальную продукцию. Основной выдвигаемый критерий – сервис, т.е. сроки создания и поставки, эффективность программы, качество и надёжность. Вид распределения – прямой маркетинг (работа с заказчиком ведётся без посредников). Условия поставки – оплата в гривнах.
7.1.3 Сегментация рынка
Сегментация рынка - разбивка рынка на четкие группы покупателей, для каждой из которых могут потребоваться отдельные товары и/или комплексы маркетинга [13]. Предприятие определяет разные способы сегментирования рынка, составляет профили полученных сегментов и оценивает степень привлекательности каждого из них.
Проведем сегментирование рынка по степени использования ПП предприятиями различных видов: коммерческие фирмы (35 %); рядовые пользователи (22 %); государственные учреждения (43 %). Эта сегментация приведена на рисунке 7.1.
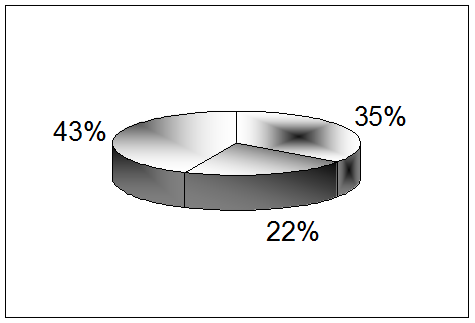
Рисунок 7.1- Сегментирование рынка по степени использования ПП предприятиями различных видов
На рисунке 7.1 приняты следующие обозначения:
35%- коммерческие фирмы;
43%- государственные учреждения;
22%- рядовые пользователи.
По географическому признаку сегмент рынка составит 50-60%.
7.1.4 Оценка рыночной направленности
Оценка по девятибалльной системе следующих показателей проекта представлена в таблице 7.1.
Таблица 7.1 - Оценка шансов и рисков проектируемого продукта.
| Показатели | БАЛЛЫ | ||||||||
| опасно | нейтрально | шансы | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| Объем рынка | X | ||||||||
| Рост рынка | Х | ||||||||
| Число конкурентов | Х | ||||||||
| Поведение конкурентов | Х | ||||||||
| Осведомленность потребителей | Х | ||||||||
| Возможность повышения цен | Х | ||||||||
| Изменение коньюктуры рынка | Х | ||||||||
| Возможность замещения ПП | Х | ||||||||
| Потенциал сервиса | Х | ||||||||
| Финансовый потенциал | Х | ||||||||
Определим среднеарифметическую величину:
(6+7+5+8+7+6+4+7+8+5)/10 = 6,5.
Так как шансы превышают опасность, то проектируемый программный продукт имеет рыночную направленность, а значит, может быть рекомендован для разработки.
7.1.5 Конкурентоспособность ПП
Данный ПП не является уникальным, и разработан для решения конкретной задачи – программное обеспечение терминального управления робототехническим комплексом. Поэтому ПП имеет конкурентов, и с увеличением осведомленности – число конкурентов будет расти.
7.2 Определение затрат на проектирование программного продукта
7.2.1 Расчет трудоемкости
Трудоемкость проекта определяется, исходя из данных об используемых функциях к ПС ВТ [13]. Первоначально определяется тип (см. таблицу 7.2) и функции ПС ВТ (таблицу 7.3).
Общий объем разрабатываемых ПС ВТ определяется по формуле (7.1).
![]() , [УМК] (7.1)
, [УМК] (7.1)
где N – общее число функций ПС ВТ;
![]() - объем функций ПС ВТ.
- объем функций ПС ВТ.
Таблица 7.2 - Тип ПС ВТ
| Код типа ПС ВТ | Наименование типа ПС ВТ | Состав и содержание типа ВТ |
| 2.0 | ПС технологии и автоматизации программирования и проектирования АСУ | ПС автоматизации проектирования (для автоматизации проектирования различных АСУ). ПС технологии программирования. ПС автоматизации программирования. |
Таблица 7.3 - Функции программных средств вычислительной техники
N функции |
Наименование (содержание) функций |
Объем функ. |
| СМ ЭВМ | ||
101 102 107 108 109 111 305 306 505 604 703 705 |
Организация ввода информации Контроль Синтаксический и семантический анализ входного языка и генерация кодов команд Процессор языка Организация ввода/вывода информации в интерактивном режиме Управление вводом/выводом Обработка файлов Обработка файлов в диалоговом режиме Управление внешней памятью Справки и обучение Расчет показателей Формирование вывода на внешние носители |
870 2100 6800 3260 1550 6450 2420 5130 - 450 7410 6200 |
![]() [УМК].
[УМК].
Затраты труда Тр на разработку ПС ВТ в зависимости от объема (![]() ) определяются по нормам времени.
) определяются по нормам времени.
Нормы времени на разработку ПС ВТ берутся в зависимости от уточненного объема ПС ВТ (V) и группы сложности ПС ВТ в человеко-днях.
![]() [чел-дни].
[чел-дни].
Общая трудоемкость ![]() для соответствующей группы сложности ПС ВТ с учетом поправочного коэффициента сложности ПС ВТ Ксл для данной группы рассчитывается по формуле:
для соответствующей группы сложности ПС ВТ с учетом поправочного коэффициента сложности ПС ВТ Ксл для данной группы рассчитывается по формуле:
![]() , [чел-дней]. (7.2)
, [чел-дней]. (7.2)
где коэффициент сложности ПС ВТ Ксл рассчитывается по формуле:
![]() , (7.3)
, (7.3)
где k1 - коэффициент, учитывающий уровень повышения сложности по дополнительным характеристикам ПС ВТ. k1=0.18 (коэффициент, учитывающий уровень повышения сложности ПС ВТ, обладающей оптимизационными расчетами, обеспечением настройки ПС ВТ на изменение структур входных и выходных данных, реализации особо сложных инженерных и научных расчетов),
![]() ;
;
![]() [чел-дней].
[чел-дней].
Полученную общую трудоемкость То разработки ПС ВТ разбивают на соответствующие стадии разработки. Трудоемкость каждой стадии разработки ПС ВТ Ti определяют по формулам:
1) Трудоемкость стадии разработки технического задания
![]() ,[чел-дни] (7.4)
,[чел-дни] (7.4)
где удельный вес трудоемкости стадии разработки в общей трудоемкости - Lтз=0.09
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8.
Т1=0.09*0.8*49.45=3.56 [чел-дней]
Трудоемкость стадии разработки экономического проекта
![]() , [чел-дни] (7.5)
, [чел-дни] (7.5)
где удельный вес трудоемкости стадии разработки в общей трудоемкости - Lэп=0.07,
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8.
Т2=0.08*0.8*49.45=3.16 [чел-дни],
2) Трудоемкость стадии технического проекта
![]() ,[чел-дни] (7.6)
,[чел-дни] (7.6)
где удельный вес трудоемкости стадии разработки в общей трудоемкости - Lтп=0.07,
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8.
Т3=0.08*0.8*49.45=3.16 [чел-дни]
4) Трудоемкость стадии рабочего проекта
![]() , (7.7)
, (7.7)
где удельный вес трудоемкости стадии разработки в общей трудоемкости - Lрп=0.61,
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8
поправочный коэффициент, учитывающий степень использования в разработке типовых (стандартных) программ ПС ВТ – Кт=1.00.
Т4=0.58*0.8*49.45*1.00=22.94 [чел-дни]
5) Трудоемкость стадии внедрения
![]() [чел-дни] (7.8)
[чел-дни] (7.8)
где удельный вес трудоемкости стадии разработки в общей трудоемкости – Lвн=0.16;
поправочный коэффициент, учитывающий степень новизны ПС ВТ – Кн=0.8
Т5=0.16*0.8*49.45=6.33 [чел-дни]
Уточненная общая трудоемкость ПС ВТ Тобщ в человекоднях (при восьмичасовом рабочем дне) определяется по формуле:
Тобщ=![]() , [чел-дней] (7.9)
, [чел-дней] (7.9)
где Ti – трудоемкость разработки i – ой стадии.
N - число стадий разработки.
Тобщ=3.56+3.16+3.16+22.94+6.33=39.15 [чел-дней]
Исходя из трудоемкости Тобщ и численности исполнителей, рассчитываем срок разработки Ф:
![]() , [месяцев] (7.10)
, [месяцев] (7.10)
где Fр =23- фонд рабочего времени в месяц [дни];
Ч=1 – численность разработчиков [чел].
![]() =1.7 [месяцев]
=1.7 [месяцев]
7.2.2 Расчет себестоимости часа машинного времени
Исходные данные для расчета себестоимости часа машинного времени приведены в таблице 7.4.
Таблица 7.4 - Данные для расчета часа машинного времени
| N | Данные | усл.об | ед.изм. | Знач. |
| 1 | Стоимость основного комплекта оборудования | С | грн | 2500 |
| 2 | Потребляемая мощность | W | кВт/ч | 0.2 |
| 3 | Коэффициент использования по мощности | Ku | - | 0.7 |
| 4 | Цена 1 кВт/ч электроэнергии | Цэ | грн | 0.156 |
| 5 | Номинальный фонд времени работы ЭВМ | Fном | час | 2073 |
| 6 | Потери времени на ремонт и профилактические работы (7% Fном) | Тном | % | 7 |
| 7 | Коэффициент годовых затрат на ремонт (% от себестоимости оборудования) | Кр | % |
6 |
| 8 | Коэффициент сменности | Ксм | - | 1 |
| 9 | Норма амортизационных отчислений на оборудование | Ноб | % | 25 |
| 10 | Норма амортизационных отчислений на здания | Нзд | % | 5 |
| 11 | Балансовая стоимость 1 кв. м | Сбал | грн | 150 |
| 12 | Общая производственная площадь | S | кв.м | 10 |
| 13 | Коэффициент начислений на фонд оплаты труда | Кн | % | 40.5 |
| 14 | Коэффициент накладных расходов (% от ФОТ) | Кнр | % | 50 |
| 15 | Коэффициент материальных затрат (% от стоимости оборудования) | Кмз | % |
7 |
Бюджет рабочего времени нужен для расчета необходимой численности рабочих и количества оборудования. Этот расчет производится для нормальных условий производства, исходя из восьмичасового рабочего дня и одной смены работы предприятия независимо от фактически установленного режима работ предприятия. Номинальный фонд времени Fном определяется по формуле (7.11).
Fном = (Dк - (Dв + Dп))∙8 - Dпп , [час] (7.11)
где Dк - количество календарных дней в году; Dк=365;
Dв - количество выходных дней в году; Dв=96;
Dп - количество праздничных дней в году; Dп=9;
Dпп - количество предпраздничных дней в году. Dпп=7.
Fном=(365-(96+9))*8-7=2073 [час]
При подсчете предпраздничных дней принято, что в том случае, когда праздник предшествует выходному дню или непосредственно следует за ним, то сокращенный рабочий день будет один.
Таблица 7.5 – Расчёт годовых эксплуатационных затрат на ЭВМ
| Наименование затрат | Методика расчета | Расчёт | Сумма, грн |
| Материальные затраты | Зм = С * Кмз / 100 | Зм=2500*7/100 | 175 |
| Затраты на электроэнергию | Зэ = Fном * W * Цэ * Ки | Зэ = 2073*0.2 * 0.156*0.7 |
45.27 |
| Расходы на оплату труда | ФОТ=Ф∙Ч∙<оклад разработчика> | ФОТ = 12*1*300 | 3600 |
| Отчисления от заработной платы | Отч = ФОТ∙Кн / 100 | Отч = 3600 * 40.5/100 |
1458 |
| Затраты на ремонт | Зр = С∙Кр / 100 | Зр = 2500*6/100 | 150 |
| Накладные расходы | Зн = ФОТ ∙Кнр / 100 | Зн=3600 *50/100 | 1800 |
| Амортизацион-ные отчисления | А=Аздания+Аоборуд-е= =Нзд∙S∙ Сбал/100+С∙Ноб / 100 |
А = 5*10*150/100 +2500*25/100 |
700 |
| Годовые эксплуат. затраты | З = Зм + Зэ + ФОТ + Отч + Зр + Зн + А | З = 175+45.27+ 3600+1458+150+ 1800+700 |
6470.25 |
Годовой эффективный фонд времени для оборудования Fэф.об определяется по формуле (7.12).
Fэф.об = Fном*(1-Тпп/100), [час] (7.12)
где Тпп - время на проведение планово-предупредительных ремонтов, профилактического осмотра, наладки и др (2-5% от Fном).
Fэф.об=2073*(1-0.03)=2010.81 [час].
Себестоимость часа машинного времени Счмв рассчитывается по формуле (7.13).
Счмв = 3/Fэф.об, [грн] (7.13)
Счмв=6470.25/2010.81 =3.218 [грн].
7.2.3 Расчет сметы затрат на проектирование ПС
Результаты расчета сведены в таб.7.6. Методика расчета представлена в [13].
Таблица 7.6 – Расчёт затрат на проектирование
| Наименование затрат | Расчётная формула | Расчёт | Сумма, грн |
| ФОТ разработчиков | ФОТ=Кдоп∙Зпрямая=Кдоп∙Ч∙Ф∙<оклад разработчика> | ФОТ = 1.3*1*1.7*300 | 663 |
| Отчисления на социальные нужды | Отчис = ФОТ∙40.5 / 100 | Oтчис = 663 *40.5/100=268.51 | 268.51 |
| Затраты на отладку ПП | Зпо = Тмв∙Счмв | Зпо = 50*3.218 | 160.9 |
| Накладные расходы | Знакл = ФОТ∙0.4 | Знакл =663*0.4 | 265.2 |
| Затраты на проектирование | Зпр = ФОТ+ Отчис+ Зпо+ +Знакл | Зпр= 663+ 268.51+160.9+265.2 |
1089.1 |
В таблице 7.6 ![]() - количество машинного времени, фактически затраченного на отладку ПС.
- количество машинного времени, фактически затраченного на отладку ПС.
7.3 Формирование цены предложения
Цена – денежная сумма, взимаемая за конкретный товар.
Ценовая политика зависит от типа рынка. С учетом того, что продавец один, выбираем рынок чистой монополии. Основной акцент делается на завоевание лидерства по показателям качества.
Существуют следующие методы ценообразования: «издержки плюс прибыль»; анализ безубыточности и обеспечения целевой прибыли; установление цены, исходя из ощущаемой ценности товара; установление цены на основе уровня текущих цен; установление цены на основе закрытых торгов.
Цена предложения разработчика устанавливается в соответствии с методом «издержки плюс прибыль». Это самый простой и распространенный метод ценообразования, который заключается в начислении определенной наценки на себестоимость товара. Этот метод популярен по ряду причин:
1) разработчик больше знает об издержках, чем о спросе;
2) если этим методом ценообразования пользуются все фирмы, их цены скорее будут схожими, что сводит ценовую конкуренцию к минимуму;
3) данный метод справедлив по отношению и к покупателю, и к разработчику, т. к. при высоком спросе разработчик не наживается за счет покупателя и вместе с тем имеет возможность получить справедливую норму прибыли.
Ценовая политика зависит от типа рынка. Рынок данного программного продукта относится к рынку олигополии.
Цена предложения разработчика формируется с учетом запланированной 50% прибыли и НДС 20%.
Ц = (Издержки + Прибыль) + НДС; [грн] (7.14)
где Издержки = Зпр; [грн]
Прибыль = Зпр·0.50; [грн]
НДС=(Издержки + Прибыль)*20/100; [грн]
Ц = (1089.1+1089.1·0.50) + (1089.1+1089.1·0.50)·20/100 = 1960.38[грн];
Так как рынок данного программного продукта относится к рынку олигополии, на рынке всего несколько продавцов и имеет место олигопольная политика цен, то в данном случае возможен вариант некоторого снижения цены программного продукта, с учетом того, что программа пишется по заказу 5 предприятий. В дальнейшем планируется продажа более чем 5 копий программного продукта, что и обеспечит рентабельность производства программного обеспечения.
Ц1=Ц/n, [грн]
где n – количество потребителей данного программного продукта; n=5,
Ц1=1960.38/5=392.08 [грн]
7.4 Расчет капитальных затрат
Капитальные вложения представляют собой:
1) для разработчикаКр =0 [грн]
Нет необходимости учитывать стоимость технических средств, т.к. в настоящее время крупные и средние предприятия полностью укомплектованы всеми необходимыми средствами для разработки программных средств.
2) для пользователя
Основными капитальными затратами для пользователя являются расходы на покупку программного продукта – 392.08 гривен и расходы на установку программного продукта и на краткий курс обучения персонала - 20 (гривен).
Кп = 392.08 + 20 = 412.08 (гривен).
Затраты на средства необходимые для работы с данным программным продуктом можно не учитывать. В настоящее время предприятия, на которые ориентирован разработанный ПП полностью укомплектованы всеми необходимыми средствами для работы с выпущенной программой.
7.5 Расчет эксплуатационных расходов потребителя
К эксплуатационным расходам относим те расходы потребителя, которые он несет при однократном обращении к ПП.
Эксплуатационные расходы определяются по формуле (7.15):
Зобр.экспл=tм*Счмв+М+(tпод*Зпод*(1+Ко/100))/Nобр+Ц1/(Т*Nобр),[грн] (7.15)
где Зобр.экспл – эксплуатационные затраты на одно обращение к ПС, грн;
tм – время одного обращения к ЭВМ, час; tм=1/4 [час];
М - материальные затраты на одно обращение, [грн];
tпод – время на подготовку исходной информации, час; tпод=1/3;
Ko – процент отчислений на социальные меры; Ко=10%
Nобр – число обращений в год; Nобр=500;
Ц1– цена продукта, грн; Ц1=392.08 [грн];
Т – планируемый срок службы, лет; Т=5[года];
Зпод – часовая заработная плата персонала, занятого подготовкой исходной информации, грн;
![]() , [ден.ед] (7.16)
, [ден.ед] (7.16)
![]() =1.786 [ден.ед]
=1.786 [ден.ед]
Материальные расходы включает в себя стоимость носителей информации для хранения резервных копий и рассчитывается по формуле (7.17):
М = (Цн * Nн) / Nобр, [грн] (7.17)
где Цн – цена носителя, [грн];
Nн – количество носителей, используемых за год;
Nобр – количество обращений к ПС ВТ за год.
М = (3*3) /500 = 0.018 [грн]
Заработная плата оператора с отчислениями на социальные меры определяется по формуле:
![]() ,[ден.ед.],
,[ден.ед.],
где ![]() - прямая часовая зарплата персонала, ден.ед.
- прямая часовая зарплата персонала, ден.ед.
ЗПопер=1/4*1.786*1.2*1.372=0.375 [ден.ед.],
Полученные расчеты сводим в таблицу 7.7.
Таблица 7.7 – Смета эксплуатационных расходов
| №п/п | Направление расходов | Сумма, ден.ед. |
| 1 | Затраты на машинное время | 0.805 |
| 2 | Материальные расходы | 0.018 |
| 3 | Заработная плата обслуживающего персонала с отчислениями на соц. меры. | 0.375 |
| 4 | Амортизация ВЦ | 0.157 |
| Итого | 1.355 | |
Введём прибыль, равную 50% от эксплуатационных затрат на одно обращение к программе 1.355*0.5=0.68
Полученные расчеты сведены в таблицу 7.8.
Таблица 7.8 – Смета эксплуатационных расходов
| N | Направление расходов | Сумма, [грн] |
| 1 | Эксплуатационные затраты на одно обращение к ПС | 1.355 |
| 2 | Прибыль | 0.68 |
| Итого | 2.032 | |
7.6 Оценка эффективности проектируемого программного продукта
Анализ эффективности проекта производится на основе интегрального экономического эффекта за весь жизненный цикл продукта.
Целью экономической оценки является определение динамики чистой текущей стоимости, то есть суммы, ежегодно возвращающейся в виде отдачи от вложенных средств.
7.6.1 Определение показателей чистого денежного потока
Определение показателей чистого денежного потока (ЧДП) за период использования проекта
ЧДПt=Pt-(Kt+Ut) (7.18)
где ЧДПt – чистый денежный поток года, [грн];
Рt – выручка в году, [грн];
Кt – капитальные вложения года, [грн];
Ut – издержки года, [грн];
Рt= Цобр.t*Nобр.t, [грн]
где Цобр.t - цена одного обращения к програмному продукту, [ден.ед];
Nобр.t - число обращений к програмному продукту в год.
Nобр1=500; Р1=2.032*500=1016 [грн]
Nобр2=500; Р2=1016 [грн];
Nобр3=500; Р3=1016 [грн];
Nобр4=500; Р4=1016 [грн];
Nобр5=500; Р5=1016 [грн].
К1=Kp=412.08 [грн]; Кр - капитальные вложения потребителя; К2 = К3 = К4 = К5 = 0 [грн].
Издержки года Ut=Зоэ*Nобр.
ЧДП1=-412.08 [грн];
ЧДП2=1016-1.355*500=338.5 [грн];
ЧДП3=1016 -1.355*500=338.5 [грн];
ЧДП4=1016-1.355*500=338.5 [грн];
ЧДП5=1016-1.355*500=338.5 [грн];
7.6.2 Определение показателей чистой текущей стоимости
Показатели чистой текущей стоимости за период реализации проекта рассчитываются по формуле (7.19).
ЧТСt=ЧДПt*Аt, [грн] (7.19)
где ЧТСt - чистая текущая стоимость в году, [грн]
ЧДПt - чистый денежный поток года, [грн];
Аt – коэффициент произведения по фактору времени;
Е – норматив приведения по фактору времени (рекомендуемый Мировым банком = 0,12);
tр – расчетный год;
t – данный год;
Аt=![]() (7.20)
(7.20)
Согласно формуле (7.20):
А1= ![]() , А1 = 1, ЧТС1=-412.08 *1= -412.08 [грн]
, А1 = 1, ЧТС1=-412.08 *1= -412.08 [грн]
А2 = ![]() , А2 = 0.893, ЧТС2=338.5 *0.893= 302.28 [грн]
, А2 = 0.893, ЧТС2=338.5 *0.893= 302.28 [грн]
А3 = ![]() , А3 = 0.797, ЧТС3=338.5 *0.797= 269.78[грн]
, А3 = 0.797, ЧТС3=338.5 *0.797= 269.78[грн]
А4 = ![]() , А4 = 0.712, ЧТС4 = 338.5 * 0.712 = 241.01[грн];
, А4 = 0.712, ЧТС4 = 338.5 * 0.712 = 241.01[грн];
А5 = ![]() , А5 = 0.635, ЧТС5 = 338.5 * 0.635 = 214.95 [грн];
, А5 = 0.635, ЧТС5 = 338.5 * 0.635 = 214.95 [грн];
7.6.3 Определение интегрального экономического эффекта
Интегральный экономический эффект определяется по формуле (7.21).
Эs=![]() , [грн] (7.21)
, [грн] (7.21)
где Т – жизненный цикл проекта, лет.
Эs= -412.08 +302.28 +269.78+241.01+214.95 = 615.94 [грн].
Результаты расчета сводятся в таблицу 7.9.
Таблица 7.9 – Расчет интегрального экономического эффекта
| N | Показатели | 2005 | 2006 | 2007 | 2008 | 2009 |
| 1 | Капитальные вложения, грн | 412.08 | 0 | 0 | 0 | 0 |
| 2 | Коэффициент приведения по фактору времени | 1 | 0.893 | 0.797 | 0.712 | 0.635 |
| 3 | Чистый денежный поток, грн. | -412.08 | 338.5 | 338.5 | 338.5 | 338.5 |
| 4 | Чистая текущая стоимость, грн. | -412.08 | 302.28 | 269.78 | 241.01 | 214.95 |
| 5 | Чистая текущая стоимость с нарастающим итогом, грн. | -412.08 | -109.8 | 159.98 | 400.99 | 615.94 |
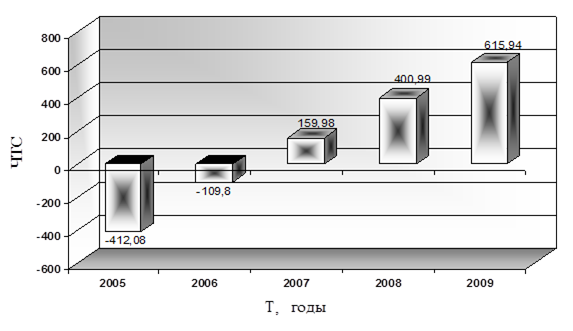
Рисунок 7.3 - Финансовый профиль проекта
Из графика видно, что в данном виде наш продукт является экономически целесообразным, так как наши затраты окупаются на втором году. Максимальный долг составляет 412.08 грн. Суммарный интегральный экономический эффект составляет 615.94 грн.
7.7 Вывод
При реализации данного ПП, с учетом рассчитанных выше экономических величин (цена, капитальные затраты, экономическая эффективность) возможно получение прибыли в размере 615.94 грн. по истечении пяти лет. Интегральный экономический эффект ПП составляет 615.94 грн., что делает его доступным для предприятий и организаций. С учетом того, что капитальные затраты составляют 412.08 грн., ПП окупается на третьем году.
Таким образом, проведенное маркетинговое исследование и расчеты показали, что разработка проекта «Проектирование ПО для терминального управления техническим объектом» целесообразна с экономической точки зрения.
8 ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
8.1 Анализ условий труда оператора ЭВМ в компьютерной лаборатории
Тип помещения – лаборатория, которая имеет следующие характеристики: площадь S = 4 × 4= 16 (м2 ); объем V = 4 × 4 × 4 = 64(м3 ) , что соответствует действующим санитарным нормам ДНАОП 0.00-1.31-99 [21], где приведены минимальные нормы на одно рабочее место:
1) S1 = 6 м2
2) V1 = 20 м.
В кабинете имеется два рабочих места. Количество работающих на рабочем месте-1 человек.
Рабочее место (РМ) оператора состоит из стола с размещенным на нем экраном, клавиатурой и подставкой под документ, принтера и стула.
Наименование ВДТ: LGFlatronT710PH. Также в состав офисной техники входят принтер SamsungML-2151Nи ксерокс Lexmark P6250.
Приведем краткую характеристику видов выполняемых работ:
a) работы с клавиатурой и дисплеем:
1) связанные с введением большого объема информации с клавиатуры;
2) связанные с анализом информации, поиском ошибок и т.п.
b) работы по распечатке документации;
c) работы с документацией и литературой.
Форма организации труда – индивидуальная.
Чертеж помещения с размещением оборудования и рабочих мест, а также дверные и оконные проемы представлен на рисунке 8.1.
В помещении поддерживается определенный температурный режим для нормальной эксплуатации ЭВМ, а также условий труда человека. Фактические значения параметров микроклимата:
Температура воздуха : Тфакт = 24 °С;
Относительная влажность воздуха, %: gфакт =53,4%;
Скорость движения воздуха: Vвозд = 0.08 м/с; (в теплый период года)
Источников вредных выбросов в помещении нет. Контроль состояния воздуха рабочей зоны осуществляется по ГОСТ 12.1.005-88 .
В помещении источниками загрязненности воздуха являются бумажная пыль и пыль с верхней одежды. Учитывая, что запыленность воздуха не должна превышать допустимых норм, 1 раз в день проводится влажная уборка.
Для освещения помещения в лаборатории используется как естественное, так и искусственное, и обеспечивается в соответствии с ДНАОП 0.00.1.31.99 системой общего равномерного освещения. На рабочем месте применяется комбинированное освещение.
В соответствии с требованиями СНИП II-4-79 освещенность при искусственном комбинированном освещении должна составлять 300 лк, при общем – 200 лк.. Коэффициент естественного освещения должен составлять 1.5%.
Естественное освещение лаборатории обеспечивается двумя оконными проемами площадью 2 м2 с одинарным переплетом. Такой оконный проем в дневное время дает достаточное освещение. КЕОф составляет 1.2%, что не соответствует нормам естественного освещения. Следовательно, необходимо использовать дополнительное освещение. Искусственное освещение обеспечивается четырьмя светильниками с двумя люминесцентными лампами типа ЛБ-30 в каждом. В помещении ряды ламп расположены параллельно стене со световым проемом, что позволяет подключать их последовательно в зависимости от степени естественного освещения. Один из светильников расположен локально над рабочим местом. Высота подвеса светильников 2,5 –3м. Оконные проемы оборудованы регулируемыми устройствами: жалюзи, занавесями, внешними козырьками.
Разряд зрительных работ, выполняемых в помещении – III, подразряд – «в» (по характеристикам фона и контраста фона с объектом различения: контраст объекта с фоном – малый, характеристика фона - темный).
Эскиз размещения светильников искусственного освещения, а также дверных и оконных проемов представлен на рисунке 8.2. Мероприятия, которые рекомендуется проводить для соблюдения СНиП II-4-79: не реже одного раза в год проверять соответствие освещенности на рабочей поверхности нормам искусственного освещения; очищать светильники не реже одного раза в три месяца; протирать окна не реже, чем два раза в год.
Освещение рабочих мест в помещении для работы распланировано так, чтобы свет не падал прямо в глаза, отсутствовали мерцающие тени, «мигание» люминесцентных ламп, яркость была распределена равномерно.
В кабинете источниками шума являются: непосредственно ЭВМ (дисководы, вентиляторы), печатающие устройства, кондиционеры, разговорная речь, шум вне рабочей зоны. Длительное действие шума на пользователя, занятого творческой работой или обработкой информации, приводят к снижению умственной работоспособности, росту количества ошибок, ускорению развития зрительного утомления, повышению расхода энергии, появлению головных болей, а также другим нежелательным последствиям.
Для обеспечения нормальной работы обслуживающего персонала уровень шума для лаборатории определен требованиями ГОСТ 12.1.003-83 и должен составлять не более 50 дБА. Фактический уровень шума по шкале А составляет примерно 40 дБА, что не превышает допустимого значения.
Методы защиты от шума: соблюдение производственной дисциплины, снижение уровня шума работающей вычислительной техники путем своевременного контроля правильности функционирования ее узлов, создающих шум и замена их при необходимости. Распределение работы офисной техники
В помещение электроэнергия поступает при питании ЭВМ, печатающих устройств и электрического освещения. ПУЭ-86 данное помещение относится к категории без повышенной опасности: сухое (относительная влажность меньше 75%), пол не токопроводящий, температура в помещении не превышает 30 °С .
Используется переменный трехфазный ток напряжением 380/220 В частотой 50 Гц.
К причинам, по которым возможно поражение человека электрическим током, относятся:
1) работа с открытыми токопроводящими элементами машин;
2) эксплуатация неисправного электрооборудования;
3) использование неисправных электрических розеток;
4) при коротком замыкании в результате уменьшения сопротивления изоляции.
Для предотвращения поражения электрическим током обслуживающего персонала предусмотрены следующие технические мероприятия:
1) все токопроводящие части машин защищены ограждающими кожухами;
2) все металлические конструкции, которые могут оказаться под напряжением, заземлены.
Пожарная безопасность регламентируется ГОСТ 12.1.004-91, инструкциями по обеспечению пожарной безопасности.
Нормами ОНТП24-86 определено, что помещение лаборатории по степени пожароопасности производства относится к категории «Д», здание по степени огнестойкости – к группе II.
Пожароопасные предметы и материалы: электропроводка компьютеры. Для извещения о пожаре и месте его возникновения, а также его ликвидации рекомендуется автоматическая пожарная сигнализация, основными элементами которой являются автоматические пожаротушители типа МДПИ-02Р ТРВ-1. В лаборатории имеются первичные средства пожаротушения – огнетушитель ОУ-2, ОУ-8.
В ГОСТ 12.2.032-78 даны эргономические требования к проектированию рабочих мест. Окраска, форма, внешний вид производственного помещения и оборудования, поддержание чистоты улучшают условия труда, являются вспомогательными средствами техники безопасности, а также улучшают условия освещения, а также психологическое состояние человека.
Стены имеют светлый цвет, не вызывающий раздражения, потолок – белый цвет, что обеспечивает максимальное отражение света.
Конструкция рабочего стола обеспечивает оптимальное размещение на рабочей поверхности оборудования. Конструкция рабочего стула обеспечивает поддержание рациональной рабочей позы при работе на ПЭВМ, позволяет изменять позу с целью снижения статического напряжения мышц шейно-плечевой области и спины для предупреждения развития утомления. Экран видеомонитора находится от глаз пользователя на расстоянии 600-700 мм. Рабочее место оснащено пюпитром для документов. Произведено размещение оборудования, создающее пространственную свободу: конфигурация рабочих панелей (клавиатур, дисплеев ЭВМ) выполнена с учетом хорошего обзора рабочего места и создания максимально комфортных условий (ГОСТ 22269-76).
Согласно ГОСТ 12.1.006-84 напряженность электрической составляющей ЭМП не должна превышать Е = 5 В/м.
У задней и боковых стенок дисплея параметры излучения превышают нормы.
Защита подразделяется на 3 группы:
1) организационная (рациональное расположение рабочих мест).
2) лечебно-профилактическая (прохождение мед. осмотра раз в ½ года).
3) инженерно-техническая (применяется экранирование).
8.2 Расчётная часть
Имея исходные данные, т.е. план комнаты (см. рисунок 8.1), произведем расчет и оценку естественного и искусственного освещения.
![]()
Рисунок 8.1 - Эскиз помещения рабочего места в лаборатории
1,2 - рабочие столы с оборудованием;
3,4 - стулья;
5 - дверной проем;
6 - шкаф;
7,8 - окна.
Размеры комнаты: 4 м ´ 4м.
Высота комнаты: 3 м.
Размеры окна: 2 м ´ 2 м.
Вредных факторов нет.
Характеристика зрительной работы – средняя точность.
Число светильников в помещении – 4 шт., число ламп в светильнике – 4 шт. (рис.8.2).
![]()
Рисунок 8.2 - Эскиз помещения рабочего места в лаборатории
1-4 - светильники;
5 - дверной проем;
6,7 - окна.
8.2.1 Проектирование естественного освещения производственных помещений
Естественное освещение изменяется в зависимости от времени суток, года, от состояния погоды. Для его характеристики и расчёта используют относительную величину е – коэффициент естественного освещения (к.е.о.). Естественная освещенность обеспечивается определённой площадью световых проёмов и их расположением.
При проектировании естественного освещения необходимая минимальная площадь световых проёмов (при боковом освещении) определяется по формуле (8.1):
 (8.1)
(8.1)
где Sп = 16 м2 – площадь пола помещения;
S0 – минимальная площадь световых проёмов, м2 ;
ен = 1.2 % – нормированное минимальное значение к.е.о., принимается по таблице 1.1;
kз = 1.2 – коэффициент запаса (в зависимости от возможного загрязнения световых проёмов принимается в пределах 1.2..2.0);
hо = 31 – световая характеристика окон, принимается по таблице 1.2 ;
kзд = 1 – коэффициент, учитывающий затенение окон противостоящими зданиями, принимается по таблице 1.3;
t0 – общий коэффициент светопропускания, определяемый по формуле:
![]()
где t1 = 0.7 – коэффициент светопропускания материала (для различных типов стекла принимается в пределах 0.65..0.9);
t2 = 0.9 – коэффициент, учитывающий потери света в переплётах светового проёма (в зависимости от вида переплёта принимается в пределах 0.5..0.9);
t3 = 0.8 – коэффициент, учитывающий потери света в несущих конструкциях (0.8..0.9);
t4 = 1 – коэффициент, учитывающий потери света в солнцезащитных устройствах (при их отсутствии t4 = 1, при наличии t4 = 0.6..0.9);
r1 = 1.75 – коэффициент, учитывающий повышение к.е.о. благодаря свету, отраженному от поверхностей помещения и подстилающего слоя, прилегающего к зданию.
Подставляя в формулу (8.1) имеющиеся значения, получаем:
![]() (м2
)
(м2
)
Таким образом, необходимая суммарная площадь световых проёмов в помещении, представленном на рисунке 8.1, должна составлять So = 8 м2 . Следовательно, в помещении, необходимо расположить два окна размером 2х2 м2 .
8.2.2 Проектирование искусственного освещения производственных помещений
При проектировании рабочего искусственного освещения производственного помещения в качестве источника света выбираем люминесцентные лампы. При выполнении в помещении зрительной работы средней точности применяется общая система освещения. При выборе типа светильника необходимо учитывать требования к распределению светового потока. Для указанного выше характера работы выбираем светильники рассеянного света. При размещении светильников необходимо учитывать удобство обслуживания, необходимую равномерность освещения и другие факторы.
Определяем размеры, определяющие размещение светильников в помещении :
1) высота подвеса светильника
h = H – hc - hp ,
где H = 3 м – высота помещения;
hc = 0 – свес;
hp = 1 – высота рабочей поверхности;
h = 2 (м);
2) расстояние между светильниками
L » 1.4 h » 1.4 * 2 = 2.8 (м);
3) расстояние от крайнего ряда светильников до стен при учёте, что рабочие поверхности горизонтальные и расположены у стен
l = (0.25..0.33) L = 0.25 * 2.8 = 0.7 (м).
Существует несколько методов расчёта искусственного освещения :
1) метод коэффициента использования светового потока (для расчёта общего равномерного освещения горизонтальной поверхности при светильниках любого типа);
2) точечный метод (для расчёта равномерного общего локализованного и местного освещения помещений при светильниках прямого света и наружного освещения);
3) метод «удельных мощностей» (при приближенных расчётах).
Воспользуемся методом коэффициента использования светового потока.
При принятом количестве светильников искомой величиной является необходимый световой поток одной лампы, определяемый по формуле (8.2):
 (8.2)
(8.2)
где Ен = 150 – нормируемая минимальная освещённость, определяется по табл. 2.1 ;
S = 16 м2 – площадь освещенного помещения;
N = 4 – число светильников;
n = 4 – число ламп в светильнике;
кз = 1.4 – коэффициент запаса (принимается в пределах 1.3..2.0 в зависимости от содержания пыли в производственных помещениях с учетом регулярной очистки светильников и вида источника света);
z = 1.2 – коэффициент неравномерности освещения (1.1..1.25);
h = 0.47- коэффициент использования светового потока (зависит от индексов помещения i и значения коэффициента отражения стен и потолка rс и rп ), определяется по таблице 2.2;
Индекс помещения вычисляется по формуле:
![]()
где А и В – соответственно длина и ширина помещения, м;
h = 2 м – расчётная высота подвеса светильников.
![]()
Подставляя в формулу (8.1) имеющиеся значения, получаем:
![]() (Лм)
(Лм)
8.3 Вывод
Разработанное программное обеспечение должно эксплуатироваться на IBMPC/AT совместимых компьютерах в помещении, соответствующем санитарным нормам, а именно: площадью не менее 16 м2 и объёмом воздуха 15 м3 . В производственном помещении в дневное время должно быть обеспечено достаточное естественное освещение, для чего необходимо расположить два окна размером 2х2 м2 , а в темное время суток – искусственное освещение, в качестве источника света которого являются люминесцентные лампы (световой поток одной лампы составляет 536.2 Лм).
Заключение
В рамках дипломного проекта разработана концепция распределенной системы терминального управления робототехническим комплексом, оперирующем в зоне опасной для жизни человека. При разработке концепции использованы современные подходы к организации сбора и передачи информации. В частности рассмотрены основы использования CAN-интерфейса. Для определения коэффициентов терминального управления разработана функция вычисления коэффициентов на двух языках программирования (язык m-скриптов и на языке C++). Возможность применения синтезированного закона опробована на специально разработанной экспериментальной модели системы. Разработка модели и апробация проведены в среде инженерных расчетов Matlab. Конечным продуктом проекта является программное обеспечение пульта управления РСТУ, которое позволяет произвести вычисление коэффициентов терминального управления, построить управляющую функцию, произвести визуализацию результатов работы, создание и сохранение файла протокола, передачу расчетных данных на борт робота манипулятора по сетевому интерфейсу. При разработке учтены все требования технического задания.
Библиографический список
1. Дистанционно управляемые роботы и манипуляторы / ВС. Кулешов, Н.А Лакота, В.В. Андрюнин и др.; Под общ. Ред. Е.П. Попова. – М.Машиностроение, 1986. – 328 с. ил.
2. Батенко А.П. Системы терминального управления. – М.: Радио и связь, 1984. – 160 с., ил.
3. Медведев В.С., Лесков А.Г., Системы управления манипуляционных роботов/Под ред. Е.П. Попова. – М.: Наука, 1978 – 416 с.
4. Летов А.М. Динамика полета и управление. – М.: Наука, – 1969. – 359 с.
5. Красовский А.А. Аналитическое конструирование систем квазитерминального управления // Автоматика и телемеханика. – 1972. – №4. – С. 5-14.
6. Seal C.E., Stabberud A.R. On final value control // IEEE Trans. – 1969. – V.7 – №2. – P. 133-143.
7. Green W.G. Logarithmic navigation for precise guidance for space vehicles // IRE Trans. – 1961. – V. ANE-8 – №2 – P. 59-71.
8. Ястребов В.С., Филатов А.М. Системы управления движением робота. – М.: Машиностроение, 179. 176 с.
9. Батенко А.П. Управление конечным состоянием движущихся объектов. – М.: Сов. радио, 1977. – 256 с.
10. Батенко А.П. Конечное управление цепочкой интеграторов // Автоматика. – 1977. – №2. – С. 63-71.
11. http://www.kaskod.ru
12. http://www.mstu.edu.ru
13. Чиликин М.Г., Ключев В.И. Теория автоматизированного электропривода. – М.: Энергия, 1979. – 616 с.
14. Borland C++Builder. Программирование на С++ без проблем / Шамис В.А.. – М.: «Нолидж», 1997 – 266с., ил.
15. Программирование в среде С++Builder / Сурков К.А., Сурков Д.А., Вальвачев А.Н.. – Мн.: ООО «Попурри», 1998. – 576 с.:ил.
Приложение а
(Обязательное)
Исходные тексты основных функций
А.1 Исходный текст функции вычисления коэффициентов терминального управления на языке Matlab
% ФУНКЦИЯ РАСЧЕТА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ
% ----------------------------------------
% ВХОДНЫЕ ПАРАМЕТРЫ:
% Xo - ВЕКТОР НАЧАЛЬНЫХ УСЛОВИЙ
% Xk - ВЕКТОР КОНЕЧНЫХ УСЛОВИЙ
% T - ВРЕМЯ ЗА КОТОРОЕ НЕОБХОДИМО ВЫПОЛНИТЬ ПЕРЕХОД
% dT - ВРЕМЯ ОПЕРЕЖЕНИЯ ФАЗОВОЙ ТОЧКИ
% ----------------------------------------
% ВЫХОДНЫЕ ПАРАМЕТРЫ:
% C - КОЭФФИЦИЕНТЫ ПАРАМЕТРОВ УПРАВЛЕНИЯ
% ----------------------------------------
function [C]=terminal_control(Xo,Xk,T,dT)
r=length(Xo); % КОЛИЧЕСТВО НАЧАЛЬНЫХ УСЛОВИЙ
n=length(Xk); % КОЛИЧЕСТВО КОНЕЧНЫХ УСЛОВИЙ
C=zeros(1,2*r+n);
%---------------------------------------------------------------% РАСЧЕТ ПАРАМЕТРОВ УПРАВЛЕНИЯ Сi
%---------------------------------------------------------------for i=0:r-1
C(i+1)=Xo(i+1)/factorial(i); % ПЕРВЫЕ r ПАРАМЕТРОВ Ci (i=0,1,...,r-1)
end
for i=r:r+n-1
summa_1=0;
summa_2=0;
for nu=0:i-1
summa_1=summa_1+factorial(r+n-nu-1)*C(nu+1)/factorial(r+n-i-1)/factorial(i-nu)/T^(i-nu);
end
for nu=0:r+n-i-1
summa_2=summa_2+((-1)^nu)*factorial(r+n-nu-1)*Xk(nu+1)/factorial(i)/factorial(r+n-i-nu-1)/factorial(nu)/T^(i-nu);
end
C(i+1)=summa_2-summa_1;
end
disp(['---------- ВЫХОДНАЯ ФУНКЦИЯ ----------'])
disp(['X(t)='])
for i=0:r+n-1
disp(['C' num2str(i) '*t^' num2str(i) '+'])
end
disp(['---------- НАЧАЛЬНЫЕ УСЛОВИЯ Xo ----------'])
for i=0:r-1
disp(['Xo(' num2str(i) ')=' num2str(Xo(i+1))])
end
disp(['---------- КОНЕЧНЫЕ УСЛОВИЯ Xk ----------'])
for i=0:n-1
disp(['Xk(' num2str(i) ')=' num2str(Xk(i+1))])
end
disp(['---------- ВРЕМЯ ----------'])
disp(['T=' num2str(T)])
disp(['---------- dT ----------'])
disp(['dT=' num2str(dT)])
disp(['---------- КОЭФФИЦИЕНТЫ Ci ----------'])
for i=0:r+n-1
disp(['C(' num2str(i) ')=' num2str(C(i+1))])
end
А.2 Исходный текст модуля вычисления коэффициентов терминального управления на языке С++
// Функции для вычисления параметров
// терминального управления v.1.0
#include <math.h>
//----------------------------------//
// ФУНКЦИЯ ВЫЧИСЛЕНИЯ ФАКТОРИАЛА N! //
//----------------------------------//
double Factorial(int n)
{
double result=1;
int i=1;
// Если аргумент функции отрицательный возвращаем -1
if (n<0) return -1;
// Расчет факториала
while (i<=n)
{
result*=i;
i++;
}
// Возвращаем результат
return result;
}
//-------------------------------------//
// ФУНКЦИЯ ВЫЧИСЛЕНИЯ ПАРАМЕТРОВ Сi //
//-------------------------------------//
// Входные параметры:
// Xo - массив начальных условий
// r - количество начальных условий
// Xk - массив конечных условий
// n - количество конечных условий
// Tk - конечное время
// Выходные параметры:
// Указатель на массив коэффициентов Ci
//-------------------------------------//
double *CoeffC(double Xo[], int r, double Xk[], int n, double Tk)
{
// Определяем массив коэффициентов
// Памать под массив необходимо очистить
// вызывающей функции delete[] Ci !!!
double *Ci = new double[r+n];
// Вычисляем первые r коэффициентов Ci
for (int i=0; i<=r-1; i++)
{
Ci[i]=(double)(Xo[i]/Factorial(i));
}
// Вычисляем оставшиеся n коэффициентов Ci
// См. Батенко А.П. "Синтез терминального управления" формула (4.16)
int v;
double sum_1, sum_2;
sum_1=sum_2=0.0;
for (int i=r; i<=r+n-1; i++)
{
for (v=0; v<=i-1; v++)
{
sum_1+=(double)(Factorial(r+n-v-1)/Factorial(r+n-i-1)/Factorial(i-v)/pow(Tk,i-v)*Ci[v]);
}
for (v=0; v<=r+n-i-1; v++)
{
sum_2+=(double)(pow(-1,v)*Factorial(r+n-v-1)/Factorial(i)/Factorial(r+n-i-v-1)/Factorial(v)/pow(Tk,i-v)*Xk[v]);
}
Ci[i]=-sum_1+sum_2;
sum_1=sum_2=0.0;
}
r=(int)sizeof(Ci)/sizeof(double);
return Ci;
}
//-------------------------------------//
А.2 Исходный текст функций программного обеспечения РСТУ
//--------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
}
//--------------------------------------------------------------void __fastcall TForm1::bbCloseClick(TObject *Sender)
{
Close();
}
//--------------------------------------------------------------
void __fastcall TForm1::bOkClick(TObject *Sender)
{
Series1->Clear();
ListBox1->Clear();
int i, k;
String S, s;
//------------------------------------------------------------
// Ввод исходных данных для расчета
//------------------------------------------------------------ int InitConditionNum=StrToInt(Edit1->Text); // Кол-во начальных условий
int FiniConditionNum=StrToInt(Edit3->Text); // - " - конечных условий
String InitCondition=Edit2->Text;
String FiniCondition=Edit4->Text;
double T=StrToFloat(Edit5->Text);
//------------------------------------------------------------
// Формирование массива начальных условий
//------------------------------------------------------------
S=Edit2->Text;
s="";
k=0;
double *xo;
xo=new double[InitConditionNum];
for (i=1; i<=S.Length(); i++)
{
if ((S[i]!=' ')&(S[i]!='[')&(S[i]!=']'))
{
s+=S[i];
}
else
{
if (!s.IsEmpty())
{
xo[k]=StrToFloat(s);
s="";
k++;
}
}
}
//------------------------------------------------------------
// Формирование массива конечных условий
//------------------------------------------------------------
S=Edit4->Text;
s="";
k=0;
double *xf;
xf=new double[FiniConditionNum];
for (i=1; i<=S.Length(); i++)
{
if ((S[i]!=' ')&(S[i]!='[')&(S[i]!=']'))
{
s+=S[i];
}
else
{
if (!s.IsEmpty())
{
xf[k]=StrToFloat(s);
s="";
k++;
}
}
}
//------------------------------------------------------------
// Вычисляем коэффициенты терминального управления
//------------------------------------------------------------
// Указатель на массив коэффициентов
double *C;
C=CoeffC(xo, InitConditionNum, xf, FiniConditionNum, T);
for (i=0; i<InitConditionNum+FiniConditionNum; i++)
{
ListBox1->Items->Add("C["+IntToStr(i)+"] = "
+FloatToStrF(C[i], ffFixed, 7, 5));
}
//------------------------------------------------------------
// Вычисляем управляющую функцию u(t)
//------------------------------------------------------------
double dT, t=0.0;
dT=StrToFloat(Edit6->Text);
int N=(int)T/dT;
StringGrid1->RowCount=N+3;
double u, sum=0.0;
for(i=0; i<=N+1; i++)
{
StringGrid1->Cells[0][i+1]=FloatToStrF(t, ffFixed, 7, 5);
for (k=0; k<InitConditionNum+FiniConditionNum; k++)
{
if (k==0)
{
sum+=C[k];
}
else
{
sum+=C[k]*pow(t, k);
}
}
Series1->AddXY(t, sum, "", clTeeColor);
Application->ProcessMessages();
StringGrid1->Cells[1][i+1]=FloatToStrF(sum, ffFixed, 5, 3);
sum=0.0;
t+=dT;
}
//------------------------------------------------------------
delete[] C;
delete[] xo;
delete[] xf;
}
//--------------------------------------------------------------
void __fastcall TForm1::FormCreate(TObject *Sender)
{
StringGrid1->Cells[0][0]="Время [сек]";
StringGrid1->Cells[1][0]="U(t)";
}
//--------------------------------------------------------------
void __fastcall TForm1::bbSaveClick(TObject *Sender)
{
ofstream out;
int i;
if (SaveDialog1->Execute())
{
out.open(SaveDialog1->FileName.c_str(), 0);
out<<"Файл протокола от "<<DateToStr(Now()).c_str()<<"\n";
for (i=0; i<ListBox1->Count; i++)
{
out<<"C["<<i<<"] = "<<ListBox1->Items->Strings[i].c_str()<<"\n";
}
for (i=0; i<StringGrid1->RowCount; i++)
{
out<<StringGrid1->Cells[0][i].c_str()<<"\t"<<StringGrid1->Cells[1][i].c_str()<<"\n";
}
out.close();
}
}
//--------------------------------------------------------------
void __fastcall TForm1::bbSendClick(TObject *Sender)
{
String S="@";
int i;
//------------------------------------------------------------
// Формируем пакет для передачи информации
//------------------------------------------------------------
for (i=0; i<ListBox1->Count; i++)
{
S+=ListBox1->Items->Strings[i]+"%";
}
S+="#";
//------------------------------------------------------------
// Вводим IP-адрес
//------------------------------------------------------------
UDP->Host=MaskEdit1->Text;
//------------------------------------------------------------
// Пересылка данных
//------------------------------------------------------------
try
{
UDP->Send(S);
}
catch(...)
{
ShowMessage("Не удалось передать информационный пакет!");
}
//------------------------------------------------------------
}
//--------------------------------------------------------------
void __fastcall TForm1::bbAboutClick(TObject *Sender)
{
FormAbout->ShowModal();
}
//--------------------------------------------------------------