| Скачать .docx |
Реферат: Розробка структурної схеми процесорного елемента та мікропрограми керування для реалізації команди
Міністерство освіти і науки України
Черкаський національний університет імені Богдана Хмельницького
Факультет інформаційних технологій та біомедичної кібернетики
Валяєв Олександр В’ячеславович
Розробка структурної схеми процесорного елемента та мікропрограми керування для реалізації команди SBR Rm , B
Курсова робота
з дисципліни
„Проектування комп’ютерних інформаційних систем”
Виконав:
––––––––––––– ст. групи КІ-031
Валяєв О. В.
Керівник:
––––––––––––– викл. Лукаш В. І.
Черкаси– 2007
ЗМІСТ
ВСТУП
1.Розробка структурної схеми
1.1.Описосновних елементів мікропроцесора
1.2.Вибір підходящої структури процесорного елемента та його опис
1.3.Реалізація пристрою управління
2.Розробка мікропрограми
2.1.Загальний алгоритм виконання процесором команди SBRRm, B
2.2.Спрощена мікропрограма та її пояснення
ВИСНОВОК
СПИСОК ВИКОРИСТАНИХ ДЖЕРЕЛ
ДОДАТКИ
На даний час практично неможливо вказати якусь галузь науки і виробництва, в якій би не використовувалися мікропроцесори (МП) і мікроЕОМ.
Універсальність і гнучкість МП як пристроїв з програмним управлінням поряд з високою надійністю і дешевизною дозволяють широко застосовувати їх в різномагітних системах управління для заміни апаратної реалізації функцій управління, контролю, вимірювання і обробки даних. Застосування МП і мікроЕОМ в системах управління промисловим обладнанням передбачає, зокрема, використання їх для управління верстатами, механізмами транспортувань, зварювальними автоматами, прокатними станками, атомними реакторами, виробничими лініями, електростанціями, а також створення на їх основі робототехнічних комплексів, гнучких автоматизованих виробництв, систем контролю і діагностики. Мікропроцесорні засоби дозволяють створювати різноманітні по складності виконуваних функцій пристрої управління – від простих мікроконтроллерів нескладних приладів і механізмів до складних спеціалізованих і універсальних систем розподіленого управління у реальному часі.
Вбудовані в прилади і апаратуру МП і прості мікроконтролери жорстко запрограмовані на реалізацію вузькоспеціалізованих задач, їх програмне забезпечення проходить відладку на спеціальних стендах або універсальних ЕОМ, потім записується в ПЗП і рідко змінюється в процесі експлуатації.
Спеціалізовані мікроЕОМ реалізуються найчастіше на основі секційних мікропрограмованих МП, що дозволяють адаптувати структуру, розрядність, систему команд мікроЕОМ під певний клас задач. Проте такий підхід організації систем вимагає трудомісткої і дорогої розробки «власного» програмного забезпечення.
Останнім часом широке поширення набувають також програмовані мікроконтролери, що є спеціалізованими мікроЕОМ, орієнтованими на розв’язування численних задач в системах управління, регулювання і контролю.
Бачимо, що досконале знання внутрішньої будови та принципів роботи мікропроцесора необхідне для досягнення високої кваліфікації в галузі комп’ютерної техніки.
Даний курсовий проект направлений на детальне вивчення будови мікропроцесора та принципів його роботи. Завдання курсової роботи заключається в наступному:
1. Розробити схему власного процесора для забезпечення виконання команди “SBRRm, B”;
2. Охарактеризувати архітектуру розроблюваного процесора, визначити принцип його роботи
3. Написати мікропрограму для мікроконтроллера, який би виконував роль блоку управління процесором
1.1. Опис основних елементів мікропроцесора
Мікропроцесор — центральний пристрій (або комплекс пристроїв) ЕОМ, який виконує арифметичні і логічні операції, задані програмою перетворення інформації, управляє обчислювальним процесом і координує роботу пристроїв системи. В обчислювальній системі можебутидекілька паралельно працюючих процесорів, такі системи називають багатопроцесорними.
Основнимихарактеристикамимікропроцесора є швидкодія і розрядність.Швидкодія — це число операцій, що виконуються за секунду. Розрядність характеризує об'єм інформації, який мікропроцесор обробляє за одну операцію: 8-розрядний процесор за одну операцію обробляє 8 біт інформації, 32-розрядний — 32 біта. Швидкість роботи мікропроцесора багато в чому визначає швидкодію комп’ютера. Він виконує всю обробку даних, що надходять в комп'ютер і зберігаються в його пам’яті, під управлінням програми, що також зберігається в пам’яті.
Моделі процесорів включають наступні пристрої:
· Пристрій управління (ПУ). Цей пристрій відповідає за видачу сигналів, що керують роботою всіх пристроїв всередині процесора і взаємодією із шиною пам'яті.
· Арифметико-логічний пристрій (АЛП, ALU). Так називається пристрій для цілочисельних операцій. Арифметичні операції, логічні операції та операції зсуву обробляються за допомогою АЛП. Ці операції складають переважну більшість програмного коду в більшості програм. У процесорі може бути декілька АЛП.
· AGU (AddressGenerationUnit) — пристрій генерації адрес. Цей пристрій не менш важливий, ніж АЛП, оскільки він відповідає за коректну адресацію при завантаженні або збереженні даних. Абсолютна адресація в програмах використовується тільки в рідкісних виключеннях. Як тільки беруться масиви даних, в програмному коді використовується непряма адресація, що примушує працювати AGU.
· Математичний співпроцесор (FPU). Процесор може містити декілька математичних співпроцесорів. Кожний з них здатний виконувати, щонайменше, одну операцію з плаваючою крапкою незалежно від того, що роблять інші АЛП. Метод конвеєрної обробки даних дозволяє одному математичному співпроцесору виконувати декілька операцій одночасно. Співпроцесор підтримує високоточні обчислення як цілочисельні, так і з плаваючою крапкою і, крім того, містить набір корисних констант, які прискорюють обчислення. Співпроцесор працює паралельно з центральним процесором, забезпечуючи, таким чином, високу продуктивність. Система виконує команди співпроцесора в тому порядку, в якому вони з'являються в потоці. Математичний співпроцесор персонального комп'ютера IBM PC дозволяє йому виконувати швидкісні арифметичні і логарифмічні операції, а також тригонометричні функції з високою точністю.
· Дешифратор інструкцій (команд). Аналізує інструкції в цілях виділення операндів і адрес, по яких розміщуються результати. Потім слідує повідомлення іншому незалежному пристрою про те, що необхідне зробити для виконання інструкції. Дешифратор допускає виконання декількох інструкцій одночасно для завантаження всіх виконуючих пристроїв.
· Кеш-пам'ять. Особлива високошвидкісна пам'ять процесора. Кеш використовується як буфер для прискорення обміну даними між процесором і оперативною пам'яттю, а також для зберігання копій інструкцій і даних, які недавно використовувалися процесором. Значення з кеш-пам'яті витягуються безпосередньо, без звернення до основної пам'яті.
· Шина — це канал пересилки даних, використовуваний спільно різними блоками системи. Інформація передається по шині у вигляді груп бітів. До складу шини для кожного біта слова може бути передбачена окрема лінія (паралельна шина), або всі біти слова можуть послідовно в часі використовувати одну лінію (послідовна шина). До шини може бути підключено багато приймальних пристроїв — одержувачів.
Типи шин:
1. Шина даних. Служить для пересилки даних між регістрами процесора та АЛП.
2. Шина адрес. Використовується для вибору необхідного елементу пам'яті або пристрою введення-виведення шляхом установки на шині конкретної адреси, що відповідає одному з елементів пам'яті або одному з елементів введення-виведення, що входять в систему.
3. Шина управління. По ній передаютьсясигнали управління для пам'яті і пристроїв введення-виведення. Ці сигнали указують напрям передачі даних (у процесор або з нього).
· Регістри — це внутрішня пам'ять процесора. Це ряд спеціалізованих додаткових елементів пам'яті, а також внутрішні носії інформації мікропроцесора. Регістр є пристроєм тимчасового зберігання даних, чиесл або команд і використовується з метою полегшення арифметичних, логічних і пересильних операцій. Основним елементом регістра є електронна мікросхема, тригер, яка здатна зберігати одну двійкову цифру (розряд). Регістр є сукупністю тригерів, пов'язаних один з одним певним чином загальною системою управління.
Деякі важливі регістри мають свої назви, наприклад:
1. лічильник команд – регістр, вміст якого відповідає адресі наступної команди; служить для автоматичної вибірки команди з послідовних елементів пам'яті.
2. регістр команд — регістр ПУ для зберігання коду команди на період часу, необхідний для її виконання. Частина його розрядів використовується для зберігання коду операції, інші — для зберігання кодів адрес операндів.
3. показник на вершину стека — використовується для роботи стеку.
Мікропроцесор є ядром системи і здійснює управління всіма операціями. Його робота представляє послідовну реалізацію мікропроцедур вибірки-дешифрації-виконання.
Таким чином, в мікропроцесор виконує наступні функції:
- вибірку команд програми з основної пам'яті;
- дешифрацію команд;
- виконання арифметичних, логічних і інших операцій, закодованих в командах;
- управління пересилкою інформації між регістрами і основною пам'яттю, між пристроями введення/виведення;
- відробіток сигналів від пристроїв введення/виведення, зокрема реалізацію переривань з цих пристроїв;
- управління і координацію роботи основних вузлів МП.
1.2 Вибір підходящої структури процесорного елемента та його опис
Структура створеного процесорного елемента зображена в додатку 1, розшифровка позначень, використаних у схемі, наведена в додатку 2.
Створюючи власну структуру процесорного елемента я вирішив, що його розрядність зручно зробити 8 біт, розрядність адрес теж я вирішив зробити 8 біт. Відповідно розрядність абсолютно всіхрегістрів, а саме регістрів загального призначення, допоміжних регістрів АЛП, регістру даних пам’яті, регістру адрес пам’яті (MAR), лічильника команд (PC), регістру команд(IR) та регістру станів (PSW) — теж 8 біт.
Команди –однооперандні. Розміркодуоперації –фіксований, і складає 8біт. Структура команди має такий вигляд:
| 15 8 | 72 | 1 0 |
| Операнд | Код операції | Rm |
Операнд вибирається після дешифрації команди в тому випадку, якщо він потрібен. Для спрощення вважається, що операнд завжди присутній, просто в деяких командах він не використовується.В нашому випадку операндом є константа, з якою виконується порівняння.Rm(біти 0 та 1)— це номер регістра, значення якого порівнюється зі значенням константи. Нехай для нашої команди біти 2-7 мають таке значення: 000001b.Так як регістрів у нас 4, то можливі наступні варіанти коду команди:
00000100 SBR R0, B
00000101SBR R1, B
00000110 SBR R2, B
00000111SBRR3, B
Кількість регістрів загального призначення (R0..R3) вибрана такою малою через нестачу портів введення/виведення в пристрої управління.
До структури процесора також ввійшов пристрій приросту. Його задача — збільшення значення 8-розрядного регістру PCна одиницю за один такт, при цьому не займаючи шину даних.
Безпосередньо до шини даних під’єднані всі структурні елементи процесора, крім пристрою управління та пристрою приросту. Останній може отримувати дані лише через регістр IR(через старший або молодший байт). Виведення даних з пристрою управління на шину можливе лише через IRoff. Під’єднати шину даних безпосередньо пристрою управління не вдалося через нестачу портів введення/виведення в пристрої управління.
Для економії часу на пересилку адреси наступної команди з регістру PCв регістр MARя вирішив з’єднати їх між собою безпосередньо. Завдяки цьому при вибірці кожної команди економиться один такт процесора. Крім того, пересилку PC-MARдля отримання наступної команди можна здійснювати під час виконання поточної команди, адже така пересилка не використовує шину даних. Тоді можна економити ще один такт при вибірці кожної команди.
На структурній схемі знехтувано лініями керування та лініями синхронізації, по яким пристрій управління посилає сигнали до всіх елементів процесора.
На рис 2 (додаток 1) показана розроблена архітектура процесора. В ній арифметико-логічний пристрій (АЛП) і всі регістри з'єднані однією загальною шиною. Це внутрішня шина процесора, яку не слід плутати з зовнішньою шиною, що з'єднує процесор з основною пам'яттю і пристроями введення\виведення.
Лінії даних і адреси зовнішньої шини пам'яті з'єднані з внутрішньою шиною процесора через регістр даних пам'яті, MDR, і регістр адреси пам'яті, MAR. Регістр MDR має два входи і два виходи. Дані можуть завантажуватися в нього або з зовнішньої шини пам'яті, або з внутрішньої шини процесора. Дані, що зберігаються в MDR також можуть бути поміщені на будь-яку з цих шин. Вхід регістра MAR з'єднаний із внутрішньою шиною і регістром PC, а його вихід — із зовнішньою. Керуючі лінії шини пам'яті з'єднані з дешифратором команди і керуючим логічним блоком.
Всі операції всередині процесора виконуються протягом періодів часу, що обумовлені тактовим сигналом процесора, або сигналом синхронізації, що надходить від пристрою управління, в якості якого в нашому випадку вступає мікроконтроллер. Сигнали, що керують конкретними операціями пересилання, активізуються на початку такту.
1.3 Реалізація пристрою управління
Пристрій управління реалізований у вигляді мікроконтроллера. Мікроконтроллер можна взяти будь-який, єдина вимога до нього — наявність п’яти потрів введення/виведення. Нехай було взято мікроконтроллер сімейства MCS-51.
4 порти введення/виведення під’єднані до управляючих ліній всіх елементів процесора. Інший 5-тий порт використовуються для введення чи виведення 8-бітних даних. Цей порт (P.2)може обмінюватись даними з молодшим та старшим байтом регістру IR.Призначення портів зображено на рис 1.
| R0in P1.0 | • | • | P0.0 IRcopin |
| R0out P1.1 | • | • | P0.1 IRcopout_mc |
| R1in P1.2 | • | • | P0.2 Yin |
| R1out P1.3 | • | • | P0.3 Yout |
| R2in P1.4 | • | • | P0.4 Zin |
| R2out P1.5 | • | • | P0.5 Zout |
| R3in P1.6 | • | • | P0.6 CLK |
| R3out P1.7 | • | • | P0.7 PCinc |
| PCin P3.0 | • | • | P2.0 IR 0 |
| PCout P3.1 | • | • | P2.1 IR 1 |
| PC_to_MAR P3.2 | • | • | P2.2 IR 2 |
| MFC P3.3 | • | • | P2.3 IR 3 |
| MARin P3.4 | • | • | P2.4 IR 4 |
| MRead P3.5 | • | • | P2.5 IR 5 |
| MDRin P3.6 | • | • | P2.6 IR 6 |
| MDRout P3.7 | • | • | P2.7 IR 7 |
| • | P4.0 ALUe0 | ||
| • | P4.1 ALUe1 | ||
| • | P4.2 ALUe2 | ||
| • | P4.3 ALUe3 | ||
| • | P4.4 ALUm | ||
| • | P4.5 IRoffin | ||
| • | P4.6 IRoffout | ||
| • | P4.7 |
Рис 1. Призначення портів пристрою управління
Розшифровка позначень
Біти портів для отримання сигналів (введення)
MFC— лінія для отримання сигналу готовності пам’яті.
Біти портів для керування (виведення):
Xin — лінія дозволу на вхід даних в регістр Xз шини.
Xout — лінія дозволу навидачу даних з регістру Xна шину.
Xin _ mc — лінія дозволу на вхід даних в регістр Xз порта мікроконтроллера.
Xout _ mc — лінія дозволу навидачу даних з регістру Xна порт мікроконтроллера.
CLK— лінія для сигналів синхронізації
PCinc — лінія для активації пристрою приросту
MRead— лінія для сигналу читання з пам’яті
PC_to_MAR— лінія дозволу пересилки даних з регістра PCв регістр MAR.
ALUe0.. ALUe0 — лінії для видачі на АЛП коду операції
ALUm— лінія вибору режиму роботи АПЛ (арифметичний / логічний)
Портдля обміну даними (введення/виведення)
IR— порт може обмінюватисьданими з молодшим байтом регістру IRта отримувати дані зі старшого байту регістру IR.
2.1 Загальний алгоритм виконання процесором команди SBR Rm , B
Для виконання програми процесор вибирає команди з пам'яті по одній і виконує обумовлені ними дії. Команди вибираються з послідовних адрес пам'яті доти, доки не зустрінеться команда переходу або розгалуження. Для цього в лічильнику команд (PC) відслідковується адреса чергової команди, що підлягає виконанню. Після вибору цієї команди вміст регістра PC змінюється так, щоб він вказував на наступну команду в пам'яті в порядку розташування адрес. Команда розгалуження може завантажити в PC іншу адресу.
Загальний алгоритм роботи процесора можна зобразити наступним чином:
1. Вибірка машинної команди
2. Збільшення лічильника команд на довжину команди
3. Дешифрація команди
4. Вибірка операнду (якщо потрібно)
5. Виконання команди
Команда “SBRRm, B” — установка бітів регістру Rmзгідно з бітовою маскою B.
Алгоритм виконання цієї машинної команди можна зобразити так:
1. Виконати команду логічного „або” над значенням регіструRmта бітовою маскою.
2. Результат логічної операції записати в регістр Rm.
3. Перейти до вибірки наступної команди
2.2 Спрощена мікропрограма та її пояснення
Спрощена мікропрограма виконання команди SBRR1, B:
(Примітка: кожен рядок відповідає одному такту процесора)
1. PC_to_MAR, MRead, WMFC
2. MDRout , IRcopin , PCinc
3. PC_to_MAR, MRead, WMFC
4. MDRout , IRoffin , PCinc , IRcopout _ mc , дешифрація
5. IRoffout , Yin
6. R1out , Yout , OR, Zin
7. Z out , R1in , End.
Кроки 1 та 2 складають фазу вибірки команди, однакову для всіх команд, кроки 3 та 4 — вибірка операнда та дешифрація.
1. На кроці 1 відбувається пересилка вмісту регістра PCв регістр MARта ініціюється операція читання з пам'яті. Після отримання від пам’яті сигналу готовності переходимо до 2-го кроку:
2. Пересилка отриманого байту з регістру MDRв регістр IRcop(це перший байт команди – код операції); інкремент адреси, що знаходиться в PC.
3. На 3-му кроці робляться такі ж дії, що і на першому, а саме запит на читання байту з пам’яті за адресою, що в PC.
4. Пересилка отриманого байту з регістру MDRв регістр IRoff(другий байт команди (для команди SBRце бітова маска)); інкремент адреси, що знаходиться в PC; пересилка коду операції з регістру IRcopв блок управління; дешифрація коду операції.
Після вибірки команди і її дешифрації відбувається власне виконання команди (в нашому випадку – SBRR1, B) .
5. Пересилка бітової маски, що знаходиться в регістрі IRoff, до регістру Yдля подальшого його використання в АЛП в якості операнду.
6. Видача на шину вмісту регістру R1, операціялогічного „або” в АЛП, результат помістити в регістр Z.
7. Пересилка значення регістру Zдо регістру R1.
Лістинг програми, розбитий по крокам, з коментарями наведений в додатку3.
Завданням курсової роботи було Розробка структурної схеми процесорного елемента та мікропрограми керування для реалізації команди “SBRRm, B”. Для його виконання було розглянуто декілька літературних джерел, архітектури різних процесорів та мікроЕОМ. Розроблена в результаті курсової роботи архітектура не претендує на звання кращої, чи оптимальної. Вона проектувалась з боку спрощення, кращої наглядності схеми, для кращого її розуміння. Деякими структурними блоками було знехтувано, про що вказувалось по ходу роботи. При розробці схеми основну увагу приділялось правильному виконанню вказаної в завданні команди.
Розроблена мікропрограма для керування виконанням команди “SBRRm, B” написана на машинній мові з використанням команд мікроконтроллера сімейства MCS-51. Створена мікропрограма виконуєтьсяза 7 тактів процесора, з них 4 такти — це вибірка команди (коду операції та операнду), а 3 інших — безпосереднє виконання команди. Це дуже проста команда, що не потребує запитів до пам’яті, тому на її виконання треба всього 3 такти.
В результаті виконання роботи я поглибив свої знання про будову, принципи роботи процесорів та мікропроцесорних систем різних архітектур.
1. Будіщев М.С. Електротехніка, електроніка та мікропроцесорна техніка. – видавництво «Афіша», 2001.–421с.
2. А. Буняк. Електроніка та мікросхемотехніка. – СМП «Астон», 2001.
3. Н. Ершова, О. Ивашенков, С. Курсков, Микропроцессоры, Пособие к курсам "Микропроцессорные средства" и "Автоматизированные системы для научных исследований"— http://dfe3300.karelia.ru/koi/posob/pos.html
4. Система команд AVR-контроллеров — http://ntlib.chat.ru/avr/instr.htm
5. Документація на мікроконтроллерифірмиIntel MCS-51/151/251. (каталог pdfфайлів) — http://www.intel.com/design/mcs51/docs_mcs51.htm
Додаток 1
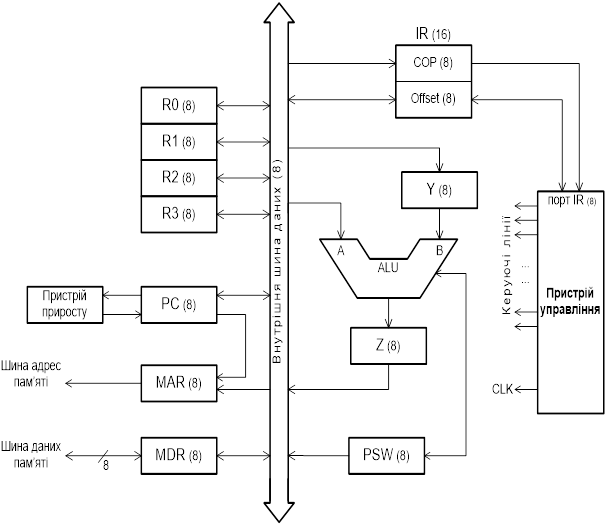
Рис 2.Структурна схема процесорного елемента
Додаток 2
Розшифровка позначень на схемі
Таблиця1
| Символьнепозначення | Опис |
| R0, R1, R2, R3 | Регістри загального призначення, використовуються програмістами для потреб програм. |
| Z | Регістр, призначені для тимчасового збереження результату виконання певної операції арифметико-логічним пристроєм. |
| Y | Регістр для тимчасового збереження операнду, який потрібно обробити в АЛП. |
| IR | (Instruction register) Регістр, в якому зберігається код машинної команди. |
| ALU | (Arithmetical-logical unit) Арифметико-логічний пристрій, АЛП |
| PC | (Program counter) Лічильник команд |
| MAR | (Memory address register) Регістр адрес пам’яті |
| MDR | (Memory data register) Регістр даних пам’яті |
| PSW | (Program status word) Регістр стану |
Додаток 3
Лістинг мікропрограми
consts.inc
R0_inEQUp1.0
R0_out EQU p1.1
R1_in EQU p1.2
R1_out EQU p1.3
R2_in EQU p1.4
R2_out EQU p1.5
R3_in EQU p1.6
R3_out EQU p1.7
PC_in EQU p3.0
PC_out EQU p3.1
PC_to_MAR EQU p3.2
MFC EQU p3.3
MAR_in EQU p3.4
MRead EQU p3.5
MDR_in EQU p3.6
MDR_out EQU p3.7
IRcop_in EQU p0.0
IRcop_out_mc EQU p0.1
Y_in EQU p0.2
Y_out EQU p0.3
Z_in EQU p0.4
Z_out EQU p0.5
CLK EQU p0.6
PC_inc EQU p0.7
IR EQU p2
ALUe0 EQU p4.0
ALUe1 EQU p4.1
ALUe2 EQU p4.2
ALUe3 EQU p4.3
ALUm EQU p4.4
IRoff_in EQU p4.5
IRoff_out EQU p4.6
prog.asm
INCLUDE 80512.mc
INCLUDE consts.inc
Start:
fetch:
; ВИБІРКА КОМАНДИ
;...
; вибірка команди
;...
deshifr:
; ДЕШИФРАЦІЯ КОДУ КОМАНДИ
; Розпізнавання команди і перехід на відповідний код її виконання
MOVA, IR
ANLA, 11111100b ; залишаємо в А лише код операції, без номера регістру
my_cmd:
CJNE A, 00000100b, other_cmd
JMP SBR_Rm_B
other_cmd:
; ...
; ...
; ...
unknown_code:
JMP fetch
; ----------------------------------------------------------
; ВИКОНАННЯ КОМАНДИ
SBR_Rm_B:
; IRoff_out , Yin
SETB IRoff_out ; Пересилка бітової маски IRoff - > Y
SETB Y_in ;
SETB CLK ; Сигнал синхронізації
CLR CLK
CLR IRoff_out
CLR Y_in
; Rm_out, Yout, OR, Zin
; вибір потрібного регістру для пересилки в Y
MOVA, IR
ANLA, 00000011b ; залишаємо в А лише сам номер регістра
regR0out:
CJNE A, 00000000b, regR1out
SETB R0_out
JMP end_case1
regR1out:
CJNE A, 00000001b, regR2out
SETB R1_out
JMP end_case1
regR2out:
CJNE A, 00000010b, regR3out
SETB R2_out
JMP end_case1
regR3out:
SETB R3_out
end_case1:
SETB R1_out
SETB Y_out
SETB ALUe0 ; Код операції OR - 0001b
CLR ALUe1 ;
CLR ALUe2 ;
CLR ALUe3 ;
SETB Z_in ; результат - > Z
SETB CLK ; Сигнал синхронізації
CLR CLK
CLR R0_out ; закриваємо всі регістри
CLR R1_out ;
CLR R2_out ;
CLR R3_out ;
CLR Y_out
CLR ALUe0
CLR Z_in
; Z out , Rm_in , End
SETBZ_out ; пересилка результату в регістр R1
; вибір потрібного регістру для пересилки: Z- > Rm
regR0in:
CJNEA, 00000000b, regR1in; в А - лише номер потрібного регістра
SETB R0_in
JMP end_case2
regR1in:
CJNE A, 00000001b, regR2in
SETB R1_in
JMP end_case2
regR2in:
CJNE A, 00000010b, regR3in
SETB R2_in
JMP end_case2
regR3in:
SETB R3_in
end_case2:
SETB CLK ; Сигнал синхронізації
CLR CLK
CLR Z_out
CLR R0_in ; закриваємо всі регістри
CLR R1_in ;
CLR R2_in ;
CLR R3_in ;
JMP fetch ; вибираєм наступну команду