| Скачать .docx |
Курсовая работа: Приложения технологии языка программирования Паскаль в прикладной механике
СОДЕРЖАНИЕ
Введение
Глава I. Основные логические конструкции в системе программирования Паскаль
1.1. Краткая история становления языка программирования Паскаль
1.2. Основные команды языка программирования Паскаль
1.3. Использование функций и процедур языка Паскаль
Глава II. Постановление и решение задач механики в среде системы Паскаль
2.1. Задачи статики, решаемые с помощью языка Паскаль
2.2. Задачи кинематики, решаемые посредством языка Паскаль
3. Задачи динамики, решаемые в среде системы Паскаль
Заключение
Литература
ВВЕДЕНИЕ
Информатика - научная дисциплина, изучающая структуру и общие свойства информации, а также закономерности всех процессов обмена информацией при непосредственном устном и письменном общении специалистов до формальных процессов обмена посредством различных носителей информации. Значительную часть этих процессов составляет научно-информационная деятельность по сбору, переработке, хранению, поиска и распространению информации.
Актуальность курсового проекта на тему «Приложения технологии языка программирования паскаль в прикладной механике» обусловлена широким внедрением компьютерных технологий во все сферы деятельности человека.
Объектом курсовой работы служит процесс внедрения новых информационных технологий в сферу науки и образования.
Предметом курсового исследования является освоение процесса решения задач прикладной механики посредством языка программирования высокого уровня Паскаль.
Целью курсового проектирования является изучение полного спектра функциональных возможностей языка программирования Паскаль для решения задач прикладной механики.
Гипотеза курсового проектирования заключается в следующем. Овладение полным спектром функциональных возможностей языка программирования Паскаль способствует повышению эффективности решения задач прикладной механики.
Задачами курсовой работы являются:
1) освоение полного спектра функциональных возможностей языка программирования Паскаль;
2) постановка и решение задач прикладной механики традиционным способом;
3) решение задач механики в среде языка программирования Паскаль.
Методами, которыми решаются задачи курсового исследования, являются:
1) теоретический анализ научно-технической литературы по языку программирования Паскаль;
2) математическое моделирование задач прикладной механики;
3) компьютерное решение задач прикладной механики.
Практическая значимость выполненной курсовой работы на тему «Приложения технологии языка программирования паскаль в прикладной механике» заключается в том, что каждый пользователь компьютера, решая задачи статики, кинематики и динамики сможет пользоваться свободно предложенными в работе методиками.
ГЛАВА I. ОСНОВНЫЕ ЛОГИЧЕСКИЕ КОНСТРУКЦИИ В СИСТЕМЕ ПРОГРАММИРОВАНИЯ ПАСКАЛЬ
1.1. КРАТКАЯ ИСТОРИЯ СТАНОВЛЕНИЯ ЯЗЫКА ПРОГРАММИРОВАНИЯ ПАСКАЛЬ
Язык Pascal был создан как учебный язык программирования в 1968 – 1971 году Никлаусом Виртом. В настоящее время этот язык имеет более широкую сферу применения, чем предусматривалось при его создании.
Язык программирования Pascal (назван в честь выдающегося французского математика и философа Блеза Паскаля (1623 – 1662)), разработан в 1967 – 1971гг. Никлаусом Виртом, профессором, директором института информатики Швейцарской высшей политехнической школы. Язык Pascal, созданный первоначально для обучения программированию как систематической дисциплине, скоро стал широко использован для разработки программных средств в профессиональном программировании.
Широкой популярностью Pascal среди программистов способствовали следующие причины:
· благодаря своей компактности, удачному первоначальному описанию Паскаль оказался достаточно лёгким для обучения.
· язык программирования Pascal, отображает фундаментальные и наиболее важные идеи алгоритмов в очевидной и легко воспринимаемой форме, что предоставляет программисту средства, помогающие проектировать программы.
· язык Pascal позволяет чётко реализовать идеи структурного программирования и структурной организации данных.
· он сыграл большую роль в развитии методов аналитического доказательства правильности программ и позволил реально перейти от методов отладки программ к системам автоматической проверки и правильности программ.
· применения языка Pascal значительно подняло «планку» надёжности разрабатываемых программ за счёт требований Pascal, к описанию используемых в программе переменных при компиляции без её выполнения, использование в Паскале простых и гибких структур управления: ветвлений, циклов.
1.2. ОСНОВНЫЕ КОМАНДЫ ЯЗЫКА ПРОГРАММИРОВАНИЯ
ПАСКАЛЬ
Условные операторы предназначены для выбора к исполнению одного из возможных действий (операторов) в зависимости от некоторого условия (при этом одно из действий может быть пустым, т.е. отсутствовать) В качестве условий выбора используется значение логического выражения. В TurboPascalимеются два вида условных операторов: if и case .
Оператор условия if . Оператор условия if является одним из самых
популярных средств, имеющих естественный порядок выполнения операторов программы.
Операторы условия if выполняются следующим образом. Сначала выражается выражение, записанное в условии. В результате его вычисления получается значение булевского типа. В первом случае, если значение выражения есть true (истина), выполняется, указанный после слова t hen (то).
Условный оператор позволяет осуществить ветвление программы только по двум направлениям, одно из которых соответствует выполнению проверяемого условия. Если для переменной необходимо осуществить ряд действий, зависящих от других условий, то надо записывать, либо вложенные условные операторы, либо несколько операторов подряд. Для такой операции удобно использовать оператор варианта.
Вход в структуру содержит вычисление или ранее полученное значение переменной (индекса варианта). Это значение может совпасть с меткой, стоящей перед оператором на одной из ветвей переключаются. В таком случае выполняется оператор, помеченный этой меткой, и происходит выход из структуры. Оператор бывает простым или составным, ограниченным операторными скобками begin … end ; Если значение индекса варианта не совпало ни с одной из меток, то выполняется оператор с номером n + 1 из строки else . Если оператор варианта содержит строку else , то это - полная форма оператора, если такой строки нет, то используется сокращённая форма оператора варианта. Метки оператора варианта могут быть константами любого типа. Их тип должен совпадать с переменной индекса варианта. Возможно, чтобы индекс варианта должен быть как именем переменной, так и выражением соответствующего типа.
Существуют задачи в которых по одной из ветки ветвления нужно рассмотреть ещё одно условие.
Рассмотрим задачу: сравнить 3 целых числа и вывести на печать максимальное.
Program chisla;
Var a, b, c: integer;
Begin
Writeln (‘Введите три числа’);
Read (a, b, c);
If ac then writeln (‘ максимально число ’, a)
Else if b>c then writeln (b максимально число ’, b)
Else writeln (‘c максимальное число’, c);
End.
1.3. ИСПОЛЬЗОВАНИЕ ФУНКЦИЙ И ПРОЦЕДУР ЯЗЫКА ПАСКАЛЬ
1.3.1. Алгоритм.
Слово алгоритм происходит от algorithmic – латинской формы написания имени латинского математика IX в. Аль-Хорезми, который сформулировал правила выполнения четырёх арифметических действий над многозадачными числами. В дальнейшем алгоритм стали называть описание любой последовательности действий, которую следует выполнить для решения заданной задачи.
Алгоритм может быть ориентирован на исполнение его человеком или автоматическим устройством. Алгоритмы, предназначены для выполнения компьютерами, обычно называют компьютерными программами или просто программами.
Алгоритмом называется точное предписание, определяющее последовательность действий исполнителя, направленных на решение поставленной задачи. В роли исполнителя алгоритмов могут выступать люди, роботы, компьютеры.
Используются разные способы записи алгоритмов. Широко распространенный словесный способ записи: это записи рецептов приготовления различных блюд в кулинарной книге, инструкции по использованию технических устройств, правила правописания и многие другие. Наглядно представляется алгоритм языком блок-схем.
Свойства алгоритма. При составлении алгоритма необходимо обеспечить, чтобы он обладал рядом свойств.
Однозначность алгоритма, под которой понимается единственность толкования исполнителем правил выполнения действий и порядка их выполнения. Чтобы алгоритм обладал этим свойством, он должен быть записан командами из системы команд исполнителя.
Для нашего примера исполнитель алгоритма должен понимать такую запись действий, как сложность числа А и В . Конечность алгоритма – обязательность завершения каждого из действий, составляющих алгоритм, и конец выполнения каждого алгоритма в целом.
Результативность алгоритма, предполагающая, что выполнение алгоритма должно завершится получением определенных результатов.
Массовость, т.е. возможность применения данного алгоритма для решения целого класса задач, отвечающих общей постановки задачи. Так как алгоритм, показанный на рисунке, позволяет правильно подсчитать сумму не только чисел 2 и 3, но любой другой пары целых чисел, он обладает свойством массовости.
Для того чтобы алгоритм обладал свойством массивности, следует составлять алгоритм, используя обозначения величин и избегая конкретных значений. Правильность алгоритма, под которой понимается способность алгоритма давать правильные результаты решения поставленных задач. Представленный в примере алгоритм обладает свойством правильности, так как в нём использована правильная формула сложения целых чисел, и для любой пары целых чисел результат выполнения алгоритма будет равен их сумме.
Компьютерная программа – это план будущих работ, составленный в расчёте на его выполнение компьютером.
Чтобы компьютер смог выполнить программу, она должна быть записана в специальной форме, доступной компьютеру; должна быть записана в соответствии со специальным набором правил.
Набор записи компьютерной программы называется «алгоритмическим языком».
Вычислительный процесс называется линейным (не разветвляющимся), если направление его продолжения на любом этапе вычислений является единственным. Алгоритм линейного вычислительного процесса описывает действия, последовательность выполнения которых не зависит от исходных данных и результатов промежуточных вычислений, т.е является постоянной.
Этот процесс является наиболее простым видом вычислений. Линейный процесс (как и другой вычислительный процесс) можно представить в виде следующих этапов: первый – задание исходных данных; второй реализация вычислений; третий – вывод результатов счёта и поясняющей информации. Этапы отображаются на блок-схеме, а затем реализуются в ПК в указанной последовательности.
Алгоритм деления отрезка АВ пополам:
1) поставить ножку циркуля в точку А;
2) установить раствор циркуля равным длине отрезка АВ;
3) провести окружность;
4) поставить ножку циркуля в точку В;
5) провести окружность;
6) через точки пересечения окружностей провести прямую;
7) отметить точку пересечения этой прямой с отрезком АВ;
Каждое указание алгоритма предписывает исполнителю выполнить одно конкретное значения действий. Исполнитель не может перейти следующей операции, не завершив полностью предыдущую. Предписания алгоритма надо выполнять последовательно одно за другим, с соответствии с порядком их записи. Следование всем предписаниям гарантирует правильное решение задачи. Данный алгоритм совершенно ясен исполнителю
Блок-схема – алгоритм, выраженный с помощью логических блоков. Блок-схема служит для того, чтобы наглядней представлять те или иные формы организаций действий. Каждое действие алгоритма, кроме проверки условия, будем помещать в прямоугольник, а вопрос о том, выполняется ли некоторое условие, - в ромб. Еще существуют: параллелограмм, овал, оборванный листок.
В рассмотренных до сих пор алгоритмах и программах все команды выполнялись последовательно одна за другой в том порядке, в каком они были записаны. Однако таким образом может быть построен алгоритм для решения далеко не всякой задачи. В практике известны задачи, дальнейший ход решения которых зависит от выполнения каких либо условий.
Ветвление - это такая форма организаций действий, при которой в зависимости от выполнения или невыполнения некоторого условия совершатся либо одна, либо другая последовательность действий.
1. Процедуры ввода-вывода. Почти каждая программа должна общаться с пользователем, то есть выводить результаты своей работы на экран и запрашивать у пользователя информацию с клавиатуры. Для того чтобы это стало возможным, в Турбо-Паскале имеются специальные процедуры (то есть небольшие вспомогательные программы), называются он процедурами ввода-вывода. Для того чтобы заставить процедуру работать в нашей программе, нужно написать её имя, за которым в скобках, через запятую перечислить параметры, которые мы хотим ей передать. Для процедуры вывода информации на экран параметрами могут служить числа или текстовые сообщения, которые должна печатать наша программа на экран.
Опишем назначение этих процедур:
write (p1, p2, ... pn); - (выводит на экран значения выражений p1, p2, ... pn , количество которых (n) неограниченно. Выражения могут быть числовые, строковые, символьные и логические. Под выражением будем понимать совокупность некоторых действий, применённых к переменным, константам или литералам, например: арифметические действия и математические функции для чисел, функции для обработки строк и отдельных символов, логические выражения и т.п. Возможен форматный вывод, т.е. явное указание того, сколько выделять позиций на экране для вывода значения.
Пример для вещественных типов:
write (r+s:10:5); - (вывести значение выражения r + s с выделением для этого 10 позиций, из них 5 (после запятой).
Для других типов все несколько проще:
write (p:10); - (вывести значение выражения p , выделив под это 10 позиций. Вывод на экран в любом случае производится по правому краю выделенного поля.
Writeln (p1, p2, ... pn) ; - (аналогично write , выводит значения p1, p2, ... pn , после чего переводит курсор на новую строку. Смысл параметров (тот же, замечания о форматном выводе остаются в силе.
Существует вариант writeln ; (без параметров), что означает лишь перевод курсора на начало новой строки.
r eadln (v1, v2, ...vn); (ввод с клавиатуры значений переменных v1,...vn.
Переменные могут иметь строковый, символьный или числовой тип. При вводе следует разделять значения пробелами, символами табуляции или перевода строки (т.е., нажимая Enter ).
r ead (v1, v2, ...vn); (по назначению сходно с readln ; отличие состоит в том, что символ перевода строки (Enter ), нажатый при завершении ввода, не «проглатывается», а ждет следующего оператора ввода. Если им окажется оператор ввода строковой переменной или просто readln ; то строковой переменной будет присвоено значение пустой строки, а readln без параметров не станет ждать, пока пользователь нажмет Enter , а среагирует на уже введенный.
Пример. Программа просит пользователя ввести с клавиатуры два целых числа и печатает на экране их сумму:
Program PrintSum;
var a,b: integer;
begin
write ('Введите два числа:');
readln (a,b);
writeln (' Сумма a и b равна ',a+b);
readln ;
end .
1.3.2. Функции числовых параметров.
| Название | Значение |
| abs(x) | модуль x |
| cos(x) | косинус x |
| frac(x) | дробная часть x |
| int(x) | целая часть x (т.е. ближайшее целое, не превосходящее x ) |
| pi | |число |
| round(x) | x , округлённое до целого |
| sin(x) | синус x |
| sqr(x) | квадрат x |
| sqrt(x) | квадратный корень из x |
1. Оператор if .
Иногда требуется, чтобы часть программы выполнялась не всегда, а лишь при выполнении некоторого условия (а при невыполнении этого условия выполнялась другая часть программы). В этом случае пользуются оператором условного выполнения, который записывается в следующем виде:
if then else;
Под оператором понимается либо одиночный оператор (например, присваивания, вызова процедуры), либо такой составной оператор, состоящий из нескольких простых операторов, помещённых между словами begin и end . Важно заметить, что перед else не ставится точка с запятой. Часть else может и отсутствовать.
Пример 1: пусть требуется найти число m=max(a,b). Этой задаче
соответствует следующий фрагмент программы на Паскале:
if a>b then m:=a else m:=b;
Пример 2: (без else) пусть дано целое число i . Требуется оставить его
без изменения, если оно делится на 2, и вычесть из него 1, если это не так.
var i: integer;
if i mod 2 = 1 then i:=i-1; {else - ничего не делать }
Пример 3: (с использованием составного оператора). Пусть даны две переменные типа real . Требуется поменять местами значения этих переменных, если a 1> a 2.
var a 1, a 2, buf : real ;
if a1>a2 then begin
buf:=a1;
a 1:= a 2;
a 2:= buf ;
end ;
Пример при подсчете суммы натуральных чисел от 1 до 100:
Var i,sum: integer;
begin
sum:=0; i:=0;
repeat
i:=i+1;
sum:=sum+i;
until i=100;
writeln (' Сумма равна : ',sum);
readln ;
end.
Важно заметить, что операторы стоящие внутри цикла repeat (иначе в теле цикла) выполняются хотя бы один раз (только после этого проверяется условие выхода).
Этот цикл записывается так: while do . (Пока условие истинно, выполнять оператор). Суть в следующем: пока условие истинно, выполняется оператор (в этом случае оператор может не выполниться ни разу, т.к. условие проверяется до выполнения).
1. Символьный тип
Тип данных, переменные которого хранят ровно один символ (букву, цифру, знак препинания и т.п.) называется символьным, а в Паскале — char . Объявить переменную такого типа можно так: var ch: char ;. Для того чтобы положить в эту переменную символ, нужно использовать оператор присваивания, а символ записывать в апострофах, например: ch:='R' ;. Для символьных переменных возможно также использование процедуры readln, например:
write(‘Выйти из игры? (Да/Нет)’); readln(ch);
if ch=’ Д ’ then ... { выходить }...
else ...{продолжать}...;
Символьные переменные в памяти компьютера хранятся в виде числовых кодов, иначе говоря, у каждого символа есть порядковый номер. К примеру, код пробела равен 32, код ‘A ’ — 65, ‘B ’ — 66, ‘C ’ — 67, код символа ‘1’ — 48, ‘2’ — 49, ‘.’ — 46 и т. п. Некоторые символы (с кодами, меньшими 32) являются управляющими, при выводе таких символов на экран происходит какое-либо действие, например, символ с кодом 10 переносит курсор на новую строку, с кодом 7 — вызывает звуковой сигнал, с кодом 8 — сдвигает курсор на одну позицию влево. Под хранение символа выделяется 1 байт (байт состоит из 8 бит, а бит может принимать значения 0 или 1), поэтому всего можно закодировать 28 = 256 различных символов. Кодировка символов, которая используется Турбо-Паскале, называется ASCII (American Standard Code for Information Interchange — американский стандартный код для обмена информацией).
Для того чтобы получить в программе код символа нужно использовать функцию chr , например:
var i: byte; {число, занимающее 1 байт, значения — от 0 до 255}
ch: char;
...
readln(i); writeln (' символ с кодом ',i,' — это ',chr(i));
Если в качестве кода используется конкретное число, а не выражение и не переменная, то можно использовать символ «#», скажем так: ch:=#7;. Для того перехода от кода к символу используется функция ord (от слова ordinal — порядковый). Имеющиеся знания позволяют нам написать программу, которая выдаёт на экран таблицу с кодами символов:
program ASCII;
var ch: char;
begin
for ch:=#32 to #255 do write(ord(ch),'—>',ch,' ');
readln;
end.
В этой программе в качестве счётчика цикла была использована символьная переменная, это разрешается, поскольку цикл for может использовать в качестве счётчика переменные любого типа, значения которого хранятся в виде целых чисел.
С использованием кодов работают ещё две функции, значения которых символьные:
1. succ (от succeedent — последующий), она выдаёт символ со следующим кодом.
2. pred (от predecessor — предшественник), выдаёт символ с предыдущим кодом.
Если попытаться в программе получить succ(#255) или pred(#0), то возникнет ошибка. Пользуясь этими функциями можно переписать предыдущую программу и по-другому:
ch:=#32;
while ch<>#255 do begin
write(ord(ch),'—>',ch,' ');
ch:=succ(ch);
end;
Сравнение символов. Также как и числа, символы можно сравнивать на =, <>, <=, >=. В этом случае Паскаль сравнивает не сами символы, а их
коды. Таблица ASCII составлена таким образом, что коды букв (латинских и большинства русских) возрастают при движении в алфавитном порядке, а коды цифр расположены по порядку: ord(‘0’)=48, ord(‘1’)=49, ... ord(‘9’)=57 . Сравнения символов можно использовать везде, где требуются логические выражения: в операторе if , в циклах и т.п.
2. Строковый тип
Для хранения строк (то есть последовательностей из символов) в Турбо Паскале имеется тип string . Значениями строковых переменных могут быть последовательности различной длины (от нуля и более, длине 0 соответствует пустая строка). Объявить строковую переменную можно двумя способами: либо var s: string; (максимальная длина строки — 255 символов), либо var s: string[n]; (максимальная длина — n символов, n — константа или конкретное число).
Для того чтобы положить значение в строковую переменную используются те же приёмы, что и при работе с символами. В случае присваивания конкретной строки, это строка должна записываться в апострофах (s:='Hello, world!'). Приведём простейший пример со строками: программа спрашивает имя у пользователя, а затем приветствует его:
Program Hello;
var s: string;
begin
write('Как Вас зовут: ');
readln(s);
write(' Привет , ',s,'!');
readln;
end.
Хранение строк. В памяти компьютера строка хранится в виде последовательности из символьных переменных, у них нет индивидуальных имён, но есть номера, начинающиеся с 1). Перед первым символом строки имеется ещё и нулевой, в котором хранится символ с кодом, равным длине строки. Нам абсолютно безразлично, какие символы хранятся в байтах, находящихся за пределами конца строки. Рассмотрим пример. Пусть строка s объявлена как string [9], тогда после присваивания s:=’Привет’; она будет хранится в следующем виде:
| Номер байта | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Содержимое | |#6 | ‘П’ | ‘р’ | ‘и’ | ‘в’ | ‘е’ | ‘т’ | ‘ю’ | ‘s’ | ‘%’ |
Для того чтобы в программе получить доступ к n -му символу строки используется запись s[n]. Если поменять значение s[0] то это отразится на длине строки. В следующем примере из строки 'Привет' мы сделаем 'Привет!':
s[0]:=#7; s[7]:='!';.
Сравнение строк. Строки сравниваются последовательно, по символам. Сравниваются первые символы строк, если они равны — то вторые, и т. д. Если на каком-то этапе появилось различие в символах, то меньшей будет та строка, в которой меньший символ. Если строки не различались, а затем одна из них закончилась, то она и считается меньшей. Примеры: 'ананас'<'кокос', 'свинья'>'свинина', ''<'A', 'hell'<'hello'.
Склеивание (конкатенация) строк. К строкам можно применять операцию «+», при этом результатом будет строка, состоящая из последовательно записанных «слагаемых». Пример: после действия s:= 'abc'+'def'+'ghi'; переменная s будет содержать ‘abcdefghi’.
Процедуры и функции для работы со строками. Наиболее часто употребляется функция length(s: string): integer (после двоеточия записан тип значения, возвращаемого функцией, в нашем случае — целое число). Эта функция возвращает длину строки s .
3. Перечисляемый тип
Предположим, что нам требуется переменная для хранения дня недели. В этом случае можно воспользоваться целым типом (например byte ) и хранить дни недели в виде чисел 1, 2, ... 7, но это будет не очень наглядно. Турбо Паскаль предоставляет более удобный вариант, а именно создание перечислимого типа, например, такого:
type Days = (Mon, Tue, Wed, Thu, Fri, Sat, Sun);
После этого можно завести переменную этого типа (var day: Days;) и использовать её. Ниже приведены примеры использования:
day := Wed ;
...
if day > Fri then writeln ('Сегодня выходной');
...
if day=Mon then writeln('Началась рабочая неделя');
Как вы уже заметили значения перечислимого типа можно сравнивать, при этом меньшим считается то, которое объявлено раньше (левее) в определении типа.
Для переменных перечисляемых типов возможно применение функций succ и pred , например, succ(Wed) дает Thu , Pred(Sun) дает Sat . Если попытаться написать Pred(Mon) или Succ(Sun) , то уже на этапе проверки программы компилятором произойдет ошибка.
Хранение значений перечисляемого типа устроено внутри довольно просто: хранятся целые числа от 0 до n , в нашем случае n = 6. Существует функция Ord , которая позволяет получить то число, в виде которого хранится какое-либо значение перечисляемого типа, например Ord(Wed) дает
При необходимости можно получить значение перечисляемого типа по его численному представлению, например, Days(1) есть Tue . После всего сказанного можно заметить, что при сравнении величин перечисляемого типа в действительности сравниваются их порядковые номера (Ord).
Пример использования перечисляемых типов:
Пусть корабль может двигаться только по четырем направлениям: на север, на запад, на юг и на восток, то есть текущее направление движения определяется переменной типа Directions = (North, West, South, East);. Этому кораблю можно подавать приказы следующих типов: вперёд, назад, влево, вправо, то есть любой приказ задать переменной типа Orders = (Ahead, Back, Left, Right); . Пусть корабль двигался по направлению d1 , после чего ему дали приказ p . Программа должна определить, в каком направлении корабль будет двигаться после выполнения приказа.
Program Ship;
type Courses = (North, West, South, East);
Orders = (Ahead, Back, Left, Right);
var d1, d2: Courses;
p: Orders;
i : integer ;
s : string ;
begin {Запрашиваем у пользователя информацию о курсе и приказе}
writeln('Введите первоначальный курс корабля ');
write('(0-север, 1-запад, 2-юг, 3-восток) ');
readln(i);
d1:=Courses(i);
writeln('Введите приказ, данный кораблю ');
write('(0-прямо, 1-назад, 2-влево, 3-вправо) ');
readln(i);
p:=Orders(i); { Определяем новый курс }
case p of
Ahead : d2:=d1;
Back : d2:=Courses((ord(d1)+2) mod 4);
Left : d2:=Courses((ord(d1)+1) mod 4);
Right : d2:=Courses((ord(d1)+3) mod 4); {-1 - нельзя , так как (Ord(North)-1) mod 4 = -1}
end; {Выводим результат на экран}
case d2 of
North : s:=' север ';
West : s:=' запад ';
South : s:=' юг ';
East : s :='восток';
end;
writeln('Теперь корабль движется на '+s);
readln;
end.
4. Ограниченный тип
Этот тип также рассмотрим на примере. Пусть в некоторой переменной нужно хранить текущее число, то есть номер дня в месяце. В Турбо Паскале можно задать тип DaysInMonth = 1..31;. Переменные и константы этого типа могут принимать только такие значения, если попытаться задать что-либо другое, то компилятор выдаст ошибку. В качестве границ могут употребляться и отрицательные числа, например Temperature = - 60..50;
В качестве базового типа (то есть типа, из которого выбирается диапазон значений) могут использоваться почти все порядковые типы, то есть те, которые хранятся в виде целых чисел. К порядковым типам относятся: все целые типы (byte, integer, и т. п.), char, boolean, перечисляемые типы и ограниченные типы. В качестве базового типа нельзя использовать лишь сам ограниченный тип (трудно представить, как это можно сделать). С учетом этого правила допустимы такие объявления типов:
type SmallLatin = 'a'..'z'; {малые латинские буквы}
MyBoolean = True..False; {хотя это и бессмысленно}
Holidays = Sat..Sun; {выходные}
Нельзя в качестве базового типа употребить какой-либо вещественный тип, следующее объявление приведет к ошибке:
type Wrong = -1.25..1.25;
Заметим, что функции Ord, Succ и Pred могут применяться к любым порядковым типам, и, в частности, к ограниченным.
Для вывода текста на экран используются две процедуры:
1. OutText(s: string). Эта процедура выводит строку s начиная с текущей позиции, то есть левый верхний угол выводимой строки находится в текущей позиции (по умолчанию это так). Текущая позиция задаётся, например, с помощью MoveTo .
2. OutTextXY ( x , y : integer ; s : string ). Используется для вывода строки в конкретной позиции.
Если требуется вывести какие либо числа, то предварительно требуется преобразовать их в строку, например, с помощью процедуры Str.
Пример:
var r: integer;
s: string;
Str(r,s);
OutTextXY(100,200,’ Результат =’+s);
Турбо Паскаль позволяет использовать несколько различных шрифтов для вывода текста. Кроме того, можно менять направление вывода текста, а также размер символов. В этих целях используется процедура SetTextStyle(Font, Direction, CharSize: word ). Перечислим возможные константы и значения для параметров этой процедуры.
Font (шрифт):
DefaultFont (шрифт 8x8 (по умолчанию)
TriplexFont (полужирный шрифт);
SmallFont (тонкий шрифт);
SansSerifFont (шрифт без засечек);
GothicFont (готический шрифт);
Direction (ориентация и направление вывода символов):
0 (привычный вывод слева направо
1 (снизу вверх (надпись «положена на бок»)
2 (слева направо, но «лежачими» буквами.
Size (размер шрифта (целые числа от 0 до 10).
Другая возможность при работе с текстом (это выравнивание его относительно задаваемых координат вывода. Для этого используется процедура SetTextJustify(horiz,wert: word). Horiz указывет как текст расположен относительно заданной позиции по горизонтали, а vert (по вертикали. Возможные константы:
для horiz:
LeftText (указанная позиция является левым краем строки);
CenterText (позиция является серединой выводимой строки);
RightText (правым краем строки);
для vert:
BottomText (позиция находится на нижнем крае изображения);
CenterText (по центру);
TopText (позиция является верхним краем изображения);
Процедура (последовательность действий (записанных на Паскале), названная каким-либо именем. Для того чтобы выполнить эту последовательность, нужно в соответствующем месте программы указать её имя (так, например, для очистки экрана при работе с графикой мы указываем ClearDevice; ). Кроме того, что программа становится при использовании процедур короче и понятнее, процедуры можно вызывать из разных мест программы (в противном случае пришлось бы повторять в тексте программы одинаковые последовательности действий несколько раз).
Те действия, которые входят в процедуру, записываются до начала основной программы в следующем виде:
program ...
const ...
type ...
var ...
procedure MyProc;
begin {действия}
end;
begin {основная программа}
end.
Рассмотрим пример нахождения максимума из трёх чисел:
Program Max1;
var a,b,c,m: integer;
begin
write(' Введите a: '); readln(a);
write(' Введите b: '); readln(b);
write(' Введите c: '); readln(c);
if a>b then m:=a else m:=b;
if c>m then m:=c;
writeln(' Максимум = ',m);
readln;
end . {Перепишем его с использованием процедуры:}
program Max2;
var a,b,c,m: integer;
procedure FindMax;
begin
if a>b then m:=a else m:=b;
if c>m then m:=c;
end;
begin
write(' Введите a: '); readln(a);
write(' Введите b: '); readln(b);
write(' Введите c: '); readln(c);
FindMax;
writeln(' Максимум = ',m);
readln ;
end.
Этот вариант можно улучшить. Пока наша процедура может искать минимум только среди значений конкретных переменных a, b и c . Заставим её искать минимум среди любых трёх целых чисел и помещать результат в нужную нам переменную, а не всегда в m . Чтобы была видна польза от такой процедуры, рассмотрим пример программы для поиска максимума среди чисел a+b, b+c и a+c :
Program Max3;
var a,b,c,m: integer;
procedure FindMax(n1,n2,n3: integer; var max: integer);
begin
if n1>n2 then max:=n1 else max:=n2;
if n3>max then max:=n3;
end;
begin
write (' Введите a: '); readln(a);
write (' Введите b: '); readln(b);
write (' Введите c: '); readln(c);
FindMax (a+b,b+c,a+c,m);
w riteln ('Максимум из сумм = ',m);
readln;
end.
В скобках после имени процедуры (в её описании) записаны так называемые параметры. Эта запись обозначает, что внутри процедуры можно использовать целые числа, обозначенные n1, n2 и n3 , а также заносить значения в переменную типа integer , которая внутри процедуры называется max (а реально во время работы программы все действия производятся над переменной m ). Параметры, в которых хранятся числа (n1,n2,n3 ) называются параметрами-значениями; а те, которые обозначают переменные (max ) (параметрами-переменными, перед ними в описании ставится слово var. Параметры, на которые имеются ссылки внутри процедуры (n1, n2, n3, max ), называются формальными, а те, которые реально используются при вызове (a+b, b+c, a+c, m ) — фактическими.
Процедуры последнего вида оказываются достаточно удобными. Можно один раз написать такую процедуру, убедиться в её работоспособности и использовать в других программах. Примерами таких процедур являются процедуры для работы со строками, встроенные в Турбо Паскаль.
В нашем примере можно переписать программу и по-другому. Максимум из трёх чисел определяется по ним однозначно, или, говоря математическим языком, является функцией этих трёх чисел. Понятие функции есть также и в Паскале. Рассмотрим такую программу:
Program Max4;
var a,b,c,m: integer;
function Max(n1,n2,n3: integer) : integer;
var m: integer;
begin
if n1>n2 then m:=n1 else m:=n2;
if n3>m then m:=n3;
Max:=m;
end;
begin
write (' Введите a: '); readln(a);
write (' Введите b: '); readln(b);
write (' Введите c: '); readln(c);
writeln (' Максимум = ',Max(a+b,b+c,a+c));
readln;
end.
Нам уже известно как вызывать функцию из программы (например sqrt , sin и т. п.). Рассмотрим описание функции. Оно очень похоже на описание процедур, но есть два отличия:
1. После имени функции и списка параметров (если есть) через двоеточиезаписывается тип значения функции (возможны не только числовые типы, но и логические, строковые, символьные);
2. Среди операторов в теле функции наиболее важными являются операторы присваивания значения функции (в нашем случае это строчка Max:=m ;).
В записанной выше функции используется так называемая локальная переменная m , то есть переменная, которая «видна» только нашей функции, а другие процедуры и функции, а также главная программа её «не видят». Кроме локальных переменных в Турбо Паскале можно определять локальные константы и типы.
Приведём другие примеры процедур и функций.
1. Напишем на Паскале функцию [pic].
function Cube(x: real): real;
begin
Cube:=x*x*x;
end;
2. Вычисление площади треугольника через длины сторон. Здесь будет
использована формула Герона: [pic] , где p (полупериметр треугольника,
a, b, c (длины сторон).
function Square(a,b,c: real): real;
var p: real;
begin
p:=(a+b+c)/2;
Square:=sqrt(p*(p-a)*(p-b)*(p-c));
end;
3. Процедура для решения квадратного уравнения. Будем передавать этой процедуре коэффициенты уравнения, а результаты своей работы она будет выдавать в трёх параметрах-переменных. Через первую, логического типа, процедура сообщит, есть ли вещественные корни, а еще в двух она выдаст сами эти корни (если корней нет, то на эти две переменные пользователь нашей процедуры может не обращать внимания).
Procedure SqEquation(a,b,c: real; var RootsExist: boolean; var x1,x2: real);
var d: real;
begin
d:=sqr(b)-4*a*c;
if d>=0 then begin
RootsExist:=true;
x1:=(-b+sqrt(d))/(2*a);
x2:=(-b-sqrt(d))/(2*a);
end
else RootsExist:=false;
end;
Можно вместо процедуры написать и функцию, по логическому значению которой мы определяем, есть ли корни, а сами корни передаются также как и в процедуре:
Function EqHasRoots(a,b,c: real; var x1,x2: real) : boolean;
var d: real;
begin
d:=sqr(b)-4*a*c;
if d>=0 then
begin
EqHasRoots:=true;
x1:=(-b+sqrt(d))/(2*a);
x2:=(-b-sqrt(d))/(2*a);
end
else EqHasRoots:=false;
end;
Использовать такую функцию даже проще чем последнюю процедуру:
if EqHasRoots(1,2,1,r1,r2) then writeln(r1,' ',r2) else writeln(' Нет корней ').
ГЛАВА II. ПОСТАНОВЛЕНИЕ И РЕШЕНИЕ ЗАДАЧ МЕХАНИКИ В СРЕДЕ СИСТЕМЫ ПАСКАЛЬ
Процесс решения задач на компьютере – это совместная деятельность человека и ЭВМ. Этот процесс можно представить виде нескольких последовательных этапов. На долю человека приходятся этапы, связанные с творческой деятельностью – постановкой, алгоритмизацией, программированием задач анализом результатов, а на долю компьютера - этапы обработки информации с соответствии с разработанным алгоритмом.
Первый этап – постановка задачи. На этом этапе участвует человек, хорошо представляющий предметную область задачи. Он должен чётко определить цель задачи, дать словесное описание содержания задачи и предложить общий подход к её решению. Для вычисления суммы двух целых чисел человек, знающий, как складываются числа, может описать задачу следующим образом: ввести два целых числа, сложить их и вывести сумму в качестве результата решения задачи.
Второй этап – математическое и информационное моделирование. Цель этого этапа – создать такую математическую модель решаемой задачи, которая может быть реализована в компьютере. Существует целый ряд задач, где математическая постановка сводится к простому перечислению формул и логических условий. Этот этап тесно связан с первым этапом, и его можно отдельно не рассматривать, однако возможно, что для полученной модели известны несколько методов решения, и тогда предстоит выбрать лучший. Для вышеописанной задачи данный этап сведётся к следующему: введённые в компьютер числа запомним в памяти под именами А и В , затем вычислим значение этих чисел по формуле А+В , и результат запомним в памяти под именем Summa .
Третий этап – алгоритмизация задачи. На основе математическогоописания необходимо разработать алгоритм решения.
Четвёртый этап – программирование. Программой называется план действий, подлежащий выполнению некоторым исполнителем, в качестве которого может выступать компьютер. Составление программы обеспечивает возможность выполнение алгоритма и соответственно поставленной задачи исполнителем – компьютером. Во многих задачах при программирование на алгоритмическом языке часто пользуются заменой блока алгоритма на один или несколько операторов, введением новых блоков, замена одних блоков на другими.
Пятый этап – ввод программы и исходных данных в ЭВМ. Программа и исходные данные вводятся в ЭВМ с клавиатуры с помощью редакторов текстов, и для постоянного хранения осуществляется их запись на гибкий или жёсткий магнитный диск.
Шестой этап – тестирование и отладка программы. На этом этапе происходит исполнение алгоритма с помощью ЭВМ, поиск и исключение ошибок. При этом программисту приходится выполнять рутинную работу по проверке работы программы, поиску и исключению ошибок, и поэтому для сложных программ этот этап часто требует, гораздо больше времени и сил, чем написание первоначального текста программы.
Отладка программы – сложный и нестандартный процесс. Исходный план отладки заключается в том, чтобы оттестировать программу на контрольных примерах.
Контрольные примеры стремятся выбрать так, чтобы при работе с ними программа прошла все основные пути блок – схемы алгоритма, поскольку на каждом из путей могут быть свои ошибки, а детализация плана зависит от того, как поведёт себя программа на этих примерах: на одном может зациклиться (т.е. бесконечно повторять одно и то же действие); на другом – дать явно неверный или бессмысленный результат и т.д. Сложные программы отлаживаются отдельными фрагментами.
Для повышения качества выполнения этого этапа используются специальные программы – отладчики, которые позволяют исполнить программу «по шагам» с наблюдением за изменением значений переменных, выражений и других объектов программы, с отслеживанием выполняемых операторов.
Седьмой этап – исполнение отлаженной программы и анализ результатов. На этом этапе программист запускает программу и задаёт исходные данные, требуемые по условию задачи.
Полученные в результате решения выходные данные анализируются постановщиком задачи, и на основе этого анализа вырабатываются соответствующие решения, рекомендации, выводы. Например, если при решение задачи на компьютере результат сложения двух чисел 2 и 3 будет 4, то следует сделать вывод о том, что надо изменить алгоритм и программу.
Возможно, что по итогам анализа результатов потребуется пересмотр самого подхода к решению задачи и возврат к первому этапу для повторного выполнения всех этапов с учётом приобретённого опыта. Таким образом, в процессе создания программы некоторые этапы будут повторяться до тех пор, пока мы получи алгоритм и программу, удовлетворяющие показанным выше свойствам.
2.1. ЗАДАЧИ СТАТИКИ, РЕШАЕМЫЕ С ПОМОЩЬЮ ЯЗЫКА ПАСКАЛЬ
Основнойзадачей статики является изучение методов замены различных систем сил, действующих на абсолютно твердое тело, простейшими системами, оказывающими на тело такое же действие, как и исходная система.
Выяснение условий взаимной уравновешенности системы сил является одной из основных задач статики.
На основе изложенной в первой главе курсовой работы алгоритм конструкции языка программирования Паскаль составим и решим ряд задач по прикладной механике.
Сформулируем задачу по статике первому разделу прикладной механики.
Задача. Найти центр тяжести тонкого круглого однородного стержня изогнутого по дуге окружности. Размеры стержня указаны на рисунке.
Геометрическая модель решения задачи по статике.
Решение:
Плоскость, в которой лежит окружность радиуса R , является плоскостью симметрии тела. Мы примем ее за координатную плоскость хОу. Тогда будем иметь zc =0. Кроме того того, тело имеет ось симметрии, расположенную в плоскости и направленную по биссектрисе угла 2α.

Рис. 1. Геометрическая модель тонкого круглого однородного стержня изогнутого по дуге окружности
Принимая эту ось ось за ось абсцисс, заключаем, что yc =0 . Выбрав начало координат в центреокружности радиуса R , вычислим абсциссу центра тяжести тела.
Выделим элементарный цилиндр с длиной образующей dl . Его объем равен
dv = πr 2 dl =π r 2 R вφ,
а абсцисса его центра тяжести равна
x = Rcosφ
При решении задач на равновесие твердого тела при наличии сил трения следует выполнить:
1.Выделить твердое тело, равновесие которого надо рассмотреть для отыскания неизвестных величин.
2.Изобразить активные силы.
3.Если твердое тело несвободно, то применив закон освобождаемости от связей, приложить к нему соответствующие реакции связей.
4.Рассмотреть равновесие данного несвободного твердого тела. как тела свободного, находящегося под действием активных сил и реакций связей.
При этом следует реакцию шероховатой поверхности представить двумя составляющими – нормальной реакцией и силой трения, или же двумя составляющими – нормальной реакцией и силой трения, или же, не раскладывая эту реакцию на составляющие, направить ее под углом трения к нормали к поверхности (при максимальной силе трения).
5.Сопоставить число неизвестных величин и число независимых уравнений равновесия, которые должны быть равны для статически определимых задач; при этом к уравнениям равновесия твердого тела следует добавить зависимость силы трения от нормального давления;
6.Выбрать систему координат.
7.Составить систему уравнений равновесия для сил, приложенных к твердому телу или к системе твердых тел.
8.Решив систему уравнений равновесия, определить искомые величины.
Таким образом, мы пришли к результату, выраженному формулой (2). Сопоставляя оба решения, мы видим, что в первом случае мы применили общий метод составления уравнений равновесия для твердого тела, находящегося под действием произвольной плоской системы сил, не учитывая особенностей данной задачи. Достоинство общих методов и заключается в том, что они ведут к цели, несмотря на различия в условиях задач.
Иногда такой путь не является самым простым и коротким. На примере второго способа решения мы видим, что при учете особенностей данной задачи удалось составить меньшее число уравнений равновесия, которые проще и скорее привели к цели.
На основе разработанного алгоритма решения задачи по статике составим Паскаль-программу.
Program Statika;
Var
x, y, a, Pmin, Pmax:Real;
R:Integer;
Begin
Writeln('vvedite ves sterchnya');
Readln(dv);
Writeln('vvedite dliny sterchnya');
Rreadln(dl);
Writeln('vvedite ugol');
Readln( φ ); { φ =60}
Pmin:=(R*(((cos( φ )*3.14/180)/cos( φ )*3.14/180)+y)); {minimalnaya velichina gruza}
Pmax:=(R*(((cos(a)*3.14/180)/cos( φ )*3.14/180)-y)); {maximalnaya velichina gruza}
{pri cos( φ )<y sila xmax ne suschestvuet}
Begin
If xmax<0 then x:=xmin+xmax;
If xmax>0 then x:=Pmin-xmax;
End;
Writeln('xmin=',xmin:8:6);
Writeln('xmax=',xmax:8:6);
Writeln('x=',x:8:6);
Readln ;
End .
2.2. ЗАДАЧИ КИНЕМАТИКИ, РЕШАЕМЫЕ ПОСРЕДСТВОМ ЯЗЫКА ПАСКАЛЬ
Скорости точек плоской фигуры могут быть определены аналитическими , графическими или же графоаналитическими методами.
Аналитический метод. При аналитическом методе должны быть заданы уравнения движения плоской фигуры (рис.2)
Хo 1 =f 1 (t) , Yо 1 =f 2 (t) , φ = f 3 (t) . (1*)
Проекции скорости точки М на неподвижные оси координат определяется равенствами:
V x =Vо 1 Х-W z (Y-Yo 1 ) (2*)
V y =Vо 1 Y + W z (Х-Хo 1 ) (3*)
В этих формулах V x , V y – искомые проекции скорости точки М на неподвижные оси координат; Vо 1 x = Хo 1 , Vо 1 y = Yo 1 -проекции скорости полюса, начала подвижной системы координат ХY на неподвижные оси координат ; W z =φ -проекция угловой скорости на ось Z , перпендикулярную к плоскости движения ;ХУ координаты точки М в неподвижной системе координат ; Хо 1 ,Yо 1 – координаты полюса О1 в неподвижной системе осей. Определение координат Х ,Y точки М , по заданным уравнениям движения плоской фигуры (1*) производится по формулам:
Х=Хо 1 +Х 1 cosφ – Y 1 sin φ
Y= Y о 1 + Х 1 sin φ +Y 1 cos φ
Проекции скорости точки М на неподвижные оси координат находятся по формулам:
Vx 1 =Vo 1 x cos φ + Vo 1 у sin φ – Wzy 1 (4*)
Vу 1 = -Vo 1 x sin φ + Vo 1 у сos φ – Wz х 1 (5*)
В этих формулах Vx , Vу - искомые проекции скорости точки М на оси х, у подвижной системы координат , жестко связанной с плоской фигурой ; х у – координаты точки М в подвижной системе осей , остальные величины имеют то же значение , что и в уравнениях (2*) , (3*).
Величины скорости точки М по известным проекциям определяются формулой:
V= √ Vx 2 + Vу2 = √ Vx 1 2 + Vу 1 2 (6*)
Направляющие косинусы даются равенствами:
cos (V,X)= Vx/V , cos (V, У )= Vy/V (7*)
cos (V,X)= Vx/V , cos (V, У )= Vy/V (8*)
Графоаналитические методы. Первый графоаналитический способ определения скоростей точек плоской фигуры основан на формуле распределения скоростей (рис.2).

Рис. 2. Геометрическая модель плоской фигуры
V=Vo 1 +W r , (9*)
в этой формуле
V – искомая скорости точки М ;
Vo 1 - скорость полюса О ,
W - угловая скорость плоской фигуры;
r - радиус-вектор , проведенный из полюса О в Рис. 3 точку М .
Таким образом, зная скорость какой-либо точки плоской фигуры, выбираем эту точку за полюс. Далее откладываем от точки М, скорость которой подлежит определению, вектор, равный скорости полюса, и вектор W r 1 , направлен перпендикулярно к r 1 , и равный по величине W r 1 .Векторная сумма этих слагаемых и дает искомую скорость точки М, Если скорость точки М известна по направлению, то можно не знать величины вращательной скорости W r 1 , так как и эта скорость, и искомая скорость точки М определяется пересечением прямой, совпадающей с направлением скорости точки М, и прямой, перпендикулярной к линии О М, проведенной из конца вектора Vо , отложенного из точки М.
После того, как треугольник или параллелограмм скоростей выражающий равенство (9*), построен, задача может считаться решенной. Величина и направление скорости точки М могут быть найдены по рис.(2) или получены из решения этого треугольника.
Формула распределения скоростей (9*)записывается часто в виде:
V b =V a +V ba (9**)
где V -искомая скорость точки В, V a -известная скорость точки А , избранной за полюс, а
V ba = W АВ , V ba = W AB, (9***)
- вращательная скорость точки В вокруг точки А , равная по модулю, произведению мгновенной угловой скорости плоской фигуры на расстояние от точки до полюса и направленная перпендикулярно к отрезку прямой ВА в сторону мгновенного вращения фигуры.
Многие задачи могут быть решены при помощи теоремы о равенстве проекции скоростей концов отрезка плоской фигуры на направление отрезка.
Второй графоаналитический метод определения скоростей плоской фигуры основан на использовании мгновенного центра скоростей этой фигуры. При не поступательном движении плоской фигуры (W =0) в каждый данный момент существует точка тела , скорость которой равна нулю. Эта точка называется мгновенным центром скоростей и обычно обозначается через P. Единственным исключением является случай так называемого мгновенно поступательного движения (W =0), который будет рассмотрен отдельно. Выбирая мгновенный центр за полюс, имеем закон распределения скоростей в плоской фигуре.
V=W r 1 , V=W М Р , (10*)
где V -искомая, скорость произвольной точки М; W -угловая скорость плоской фигуры, r 1 -радиус-вектор, проведенный из мгновенного центра скоростей в точку М, называемый мгновенным радиусом. Таким образом, скорости всех точек плоской фигуры являются в данный момент вращательными скоростями вокруг мгновенного центра скоростей. Их величина равна произведению величин угловой скорости на модуль мгновенного радиуса, а направлены они перпендикулярно к мгновенному радиусу. Таким образом, величина скоростей точки плоской фигуры пропорциональны величине мгновенных радиусов:
V b / ВР=V a / АР=...=W, (11*)
При графоаналитических методах решения задач рекомендуется такая последовательность действий:
1) Выбрать за полюс ту точку плоской фигуры, направление скорости которой известно;
2) найти другую точку плоской фигуры, направление скорости которой известно;
1) пользуясь формулой распределения скоростей, найти скорость этой точки плоской фигуры;
2) исходя из формулы распределения скоростей определить значение угловой скорости плоской фигуры в данный момент времени;
3) зная угловую скорость фигуры и скорость полюса, найти с помощью формулы распределения скоростей искомые скорости других точек фигуры.
При графоаналитическом методе решения задач может быть применен метод проекции. В этом случае может быть рекомендован следующий порядок решения задач:
1. Выбрать за полюс точку плоской фигуры, скорость которой известна;
2. Пользуясь формулой распределения скоростей, построить скорость другой точки плоской фигуры, у которой известно направление ее скорости;
3. Спроектировать полученный треугольник скоростей на направление прямой, соединяющей обе точки, и найти скорость второй точки;
4. Спроектировать треугольник скоростей на направление, перпендикулярное к прямой, соединяющей обе точки, и найти вращательную скорость второй точки по отношению к полюсу;
5. Разделив вращательную скорость на расстояние от точки до полюса, найти мгновенную угловую скорость плоской фигуры;
6. Зная мгновенную угловую скорость фигуры, можно найти скорости любых точек плоской фигуры, пользуясь формулой распределения скоростей.
Если задача решается при помощи мгновенного центра скоростей, рекомендуется такая последовательность:
1) определить положение мгновенного центра плоской фигуры;
2) найти величину мгновенного радиуса той точки плоской фигуры, скорость которой известна и определить угловую скорость плоской фигуры, разделив величину скорости точки на величину мгновенного радиуса;
3) найти искомые величины скоростей точек плоской фигуры, умножая угловую скорость на мгновенный радиус соответствующей точки или используя.
Теперь рассмотрим конкретную задачу по кинематике.
Задача. Для преобразования периодического возвратно-поступательного движения во вращательное движение в двигателях внутреннего сгорания применяют шатунно-кривошипный механизм, состоящий из кривошипа ОА= r , вращающегося вокруг неподвижной точки О в плоскости рисунка, шатуна АВ= l , шарнирно соединенного с кривошипом, и поршня В , двигающегося по горизонтальным направляющим цилиндра, совпадающим с прямой ОВ.
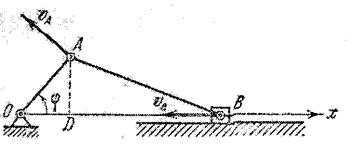
Рис. 3. Геометрическая модель плоского шатунно-кривошипного механизма
На основе разработанного алгоритма решения задачи по кинематике составим Паскаль – программу.
Program Kinematika;
Var t,f0,k,b1,b2,x1,x2,a,b,l,d,f1,f2,a1,a2,w1,w:real;
Begin
Write('vvedite welichini a b d l w t = ');
Readln(a,b,d,l,w,t);
x1:=(sqr(d+b)-a*a+l*l)/(2*l*(d+b));
f1:=(180/pi)*arctan(sqrt(1-sqr(x1))/x1);
x2:=(sqr(d+b)-a*a-l*l)/(2*l*a);
a1:=(180/pi)*arctan(sqrt(1-sqr(x2))/x2);
x1:=-(l*l+sqr(d-b)-a*a)/(2*l*(d-b));
f2:=(180/pi)*arctan(sqrt(1-sqr(x1))/x1);
x2:=(l*l-sqr(d-b)+a*a)/(2*l*a);
a2:=(180/pi)*arctan(sqrt(1-sqr(x2))/x2);
f0:=w*t;
k:=sqrt(l*l+b*b-2*l*b*cos(f0));
x1:=(k*k+d*d-a*a)/(2*k*d);
b2:=arctan(sqrt(1-sqr(x1))/x1);
x2:=(1/k)*sin(f0);
b1:=arctan(x2/sqrt(1-sqr(x2)));
w1:=(b*k*sin(b1+b2)*w)/(a*a*sin(b2));
Writeln('a1= ', a1:6:3,' a2= ',a2:6:3);
Writeln('f1= ', f1:6:3,' f2= ',f2:6:3);
Writeln('w1= ',w1:6:3);
Readln;
End .
2.3. ЗАДАЧИ ДИНАМИКИ, РЕШАЕМЫЕ В СРЕДЕ СИСТЕМЫ ПАСКАЛЬ
Теорема о движении центра масс системы материальных точек.
В случае сохранения скорости центра масс. Теорема о движении центра масс системы материальных точек. Зависимость между скоростью центра масс и скоростями точек материальной системы имеет вид:
Vс =(∑mk *Vk )/M, т.е.
xc =(∑mk *xk )/M, yc =(∑mk *yk )/M, zc =(∑mk *zk )/M (1*)
Здесь
V с =xc *i+yc *j+zc *k
Зависимость между ускорением центра масс и с ускорениями точек материальной системы выражается соотношением
Wс =(∑mk *Wk )/M, т.е.
xc =(∑mk *xk )/M, yc =(∑mk *yk )/M, zc =(∑mk *zk )/M, (2*)
Здесь
W с =xc *i+yc *j+zc *k
Напомним формулировку теоремы о движении центра масс: центр масс системы материальных точек движется как материальная точка, масса которой равна массе материальной системы и к которой приложены все внешние силы, действующие на систему: M*Wc=∑Fk.
Та же теорема, записанная в проекциях на оси декартовых координат имеет вид:
Mxc =∑Fkx, Myc =∑Fky, Mzc =∑Fkz, (3*)
Движение центра масс системы материальных точек зависит от внешних сил, приложенных к данной системе. Внутренние силы, которые отсутствуют в формулировке теоремы, непосредственно на движение центра инерции системы не влияют. Это обстоятельство значительно облегчает решение задач, так как внутренние силы системы большей частью бывают неизвестны.
Задачи динамики поступательного движения твердого тела решаются посредством теоремы о движении центра масс системы материальных точек.
Действительно, применив эту теорему, мы определим уравнение траектории, скорость и ускорение центра тяжести твердого тела. При поступательном движении твердого тела траектории всех точек одинаковы, а скорости и ускорения их соответственно равны.
С помощью теоремы о движении центра масс можно решать прямые и обратные задачи динамики. Последовательность решения задач:
1. Изобразить на рисунке все внешние силы системы;
2. Выбрать систему осей координат;
3. Записать теорему о движении центра масс (3*) в проекциях на декартовы оси координат;
4. Вычислить суммы проекций всех внешних сил системы на оси декартовых координат и подставить их в (3*);
5. В зависимости от условия решать прямую, либо обратную задачи динамики.
В некоторых прямых задачах бывают заданы все внешние силы, корме одной, массы всех материальных точек системы и законы их движения. Тогда после выполнения первых четырех пунктов для вычисления левых частей уравнения (3*) надо воспользоваться вспомогательными формулами
Mxc =∑mk xk , Myc =∑mk yk , Mzc =∑mk zk (4*)
где mk – масса k-ой точки, а xk, yk, zk – уравнения ее движения, ввести эти результаты в (3*) и определить неизвестную силу.
В некоторых обратных задачах бывают заданы все внешние силы, массы всех точек системы и законы движения всех точек, кроме одной и требуется определить движение этой точки. Тогда, после выполнения первых четырех пунктов также следует воспользоваться формулами (4*), полученные результаты ввести в левые части уравнений (3*) и затем найти искомый закон движения точки.
Если в состав системы входят тела с непрерывным распределением масс, то следует записать координаты xk, yk, zk центров тяжести этих тел и затем воспользоваться формулами (4*).
Задача. Эпициклический механизм, расположенный в вертикальной плоскости, установлен на горизонтальной идеально гладкой плоскости и прикреплен к ней болтами K и L . Зубчатое колесо 1 радиуса r1 неподвижно. С2 – центр тяжести зубчатого колеса 2 весом Р2 и радиусом r2 . С1 – центр тяжести станины А и колеса 1 , общий вес которых равен Р1 . Массой кривошипа С1 С2 , вращающегося с постоянной угловой скоростью w , пренебречь. В начальный момент кривошип занимал правое горизонтальное положение. Определить:
1) нормальное давление механизма на плоскость,
2) угловую скорость w вращения кривошипа, при которой механизм в условиях отсутствия болтов начнет подпрыгивать над горизонтальной плоскостью,
3) наибольшее горизонтальное усилие, действующее на болты,
движение центра тяжести С1 станины механизма после среза болтов K и L .

Рис. 4. Геометрическая модель наклонной плоскости.
Решение. Материальная система состоит из двух масс: неподвижного колеса 1 со станиной и подвижного колеса 2. Изобразим внешние силы этой системы: Р1 – вес станины и неподвижного колеса 1, Р2 – вес подвижного колеса 2, Ry – суммарная нормальная реакция плоскости, Rx – суммарная тангенциальная реакция болтов K и L. Направим ось Oy по вертикали через точку С1 , ось x – вдоль горизонтальной плоскости направо.
Запишем теорему о движении центра масс системы в проекциях на оси x и y:
Mxc =∑Fkx , Myc =∑Fky , Mzc =∑Fkz
В данной задаче
∑ Fkx = Rx , ∑ Fky = Ry - P 1 - P 2 , Rx = Mxc , (1)
Ry = Myc +P1 +P2 (2)
Для определения сил Rx и Ry остается подсчитать Mxc и Myc . Вычисление Mxc и Myc ведется по формулам:
Mxc =∑mk xk , Myc =∑mk yk .
В данном случае
Mxc = m1 x1 +m2 x2 и Myc = m1 y1 +m2 y2 , (3).
Где x1 и y1 – координаты центра тяжести С1 станины механизма и неподвижного колеса 1, x2 и y2 – координаты центра тяжести С2 подвижного колеса 2.
Как видно из рис., x1 =0, y1 =ОС1 – постоянная, x1 =C1 C2 cosw t=(r1 +r2 ) cos w t (угол поворота кривошипа С1 С2 равен φ=wt, так как по условию w постоянна), y2 =ОС1 +С1 С2 sinw t=ОС1 +(r1 +r2 ) sinw t .
Вычислив вторые производные x1 , y1 , x2 , y2 по времени t находим x1 =0 y1 =0, x2 =-(r1 +r2 ) w2 cosw t, y2 =-(r1 +r2 ) w2 sinw t .
Внеся эти значения в формулы (3), получим:
Mxc = -m2 ( r1 + r2 )w 2 соs wt,(4)
Myc
=
-m2
( r1
+ r2
)w
2
sin
wt
(5)
После подстановки (4) в (1) и (5) в (2) находим:
Rx = -P2 /g *( r1 + r2 )w2 со s wt (6)
Ry = P1 + P2 - P2 /g *( r1 + r2 )w 2 sin wt (7)
Давление механизма на горизонтальную плоскость направлено противоположно реакции Ry и по модулю равно ей:
Ny =P1 + P2 -P2 /g *( r1 +r2 ) w 2 sin wt
Наибольшее давление:
Ny max = P 1 + P 2 + P 2 / g * ( r 1 + r 2 ) w 2
Наименьшее давление:
Ny min = Р1 + P 2 - P 2 / g * ( r 1 + r 2 ) w 2
В условиях отсутствия болтов механизм может начать подпрыгивать над горизонтальной плоскостью. Это будет иметь место при Rymin <0, т.е при Р1 +P2 -P2 /g* (r1 + r2 ) w2 <0, откуда следует, что угловая скорость w вращения кривошипа C 1 C 2 , при которой происходит подпрыгивание механизма, должна удовлетворять неравенству
w > √g*(P1 +P2 ) / P2 (r1 +r2 ).
Горизонтальное давление, действующее на болты, направлено противоположно Rх (см. формулу (6)), причем
Nx =P2 /g*(r1 + r2 )w2 coswt.
Наибольшее давление равно
Nxmax =P2 /g*(r1 + r2 )w2
Допустим, что под действием, силы Nx
произошел срез болтов.
Тогда весь механизм начнет двигаться по идеально гладкой горизонтальной плоскости.
На рис. б изображен механизм в положении, когда точка С1 сместилась с оси у направо на х 1 . Так как станина механизма находится в движении относительно оси х, то х 1 является функцией времени t .
Из чертежа видно, что в данном случае
х 2 =х1 + С1 С 2 cos wt = х1 + ( r 1 + r 2 ) cos wt .
Следовательно,
M xc =т 1 х 1 +т2 x 2 = ( m 1 +m 2 ) x 1 – m 2 ( r 1 + r 2 ) w 2 cos wt (8)
Теорема о движении центра масс системы материальных точек в проекции на ось х имеет вид
Мхс = ∑ Fe kx
Так как после среза болтов реакция Rx отсутствует, а внешние силы Р1 Р 2 и Rу перпендикулярны к оси х, то ∑F kx = 0 иМхс = 0. Подставив в это уравнение значение Mx с из формулы (8), получим
(т1 + m 2 ) х1 - m 2 ( r 1 + r 2 ) w 2 cos wt = 0,
т. е.
x 1 = Р 2 /( Р 1 + Р 2 )* (r1 + r2 ) w2 cos wt, (9)
Это - дифференциальное уравнение движения центра тяжести С1 станины механизма по идеально гладкой горизонтальной плоскости при отсутствии болтов. Для интегрирования уравнения (9) должны быть известны начальные условия движения точки С1 . Так как в момент среза болтов точка C1 находилась на оси у и была в покое, то начальные условия движения записываются в виде:
при t = 0 x1 =0 и y1 = 0.
Проинтегрировав дифференциальное уравнение (9), получим:
x 1 = Р 2 / Р 1 + Р 2 * (r1 + r2 ) w sin wt + D1
После подстановки начального условия движения t = 0 и x 1 = 0 имеет D 1 = 0 , т. е
x 1 = Р 2 / Р 1 + Р 2 * (r1 + r2 ) w sin wt
Вторично проинтегрировав, находим х1 = - Р2 /Р1 +Р2 *(г1 + r2 ) coswt +D2 . Использовав то, что при t=0, х1 =0, имеем:
D 2 = Р 2 /Р 1 +Р 2 * (r1 + r2 )
т.е. x 1 = Р 2 / Р 1 +Р 2 * ( r 1 + r 2 )(1- cos wt ).
Итак, центр тяжести С1 станины механизма в случае отсутствия болтов совершает гармонические колебания с амплитудойР 2 /Р 1 +Р 2 * ( r 1 + r 2 ) и круговой частотой, равной угловой скорости w вращения кривошипа С1 С2 .
Эту задачу можно решить также с помощью уравнения динамики переносного движения. Как известно, переносное поступательное движение системы происходит как движение абсолютное под действием всех внешних сил системы и сил инерции масс в их относительном движении, т.е.
Mwe =∑Fk +∑Jrk ,
где F k — внешние силы, aJrk — силы инерции в относительном движении.
В проекциях на оси декартовых координат имеем:
Мхе =∑ Fkx e + ∑ Jrkx Муе = ∑ Fky e + ∑ Jrky ,
k =1
Мzе = ∑ Fkz e + ∑ Jrkz
k =1
В данной задаче колесо 2, участвуя в переносном поступательном движении вместе с колесом 1 и станиной, совершает относительное вращательное движение вокруг оси, проходящей через центр тяжести С1 колеса 1 и станины перпендикулярно к плоскости ху.
Изобразив все внешние силы системы Р1 , Р2, Rx и R y (см. рис. в), добавляем центробежную силу инерции в относительном движении
Jr n = -Р2 /g*w rn . Так как точка С2 в относительном движении описывает окружность с центром С1 радиуса С1 С2 = r1 + r2 , то, центростремительное ускорение wrn , направлено от С2 к С1 и, следовательно, центробежная сила инерции в относительном движении Jr n направлена противоположно. По модулю
Jr n = - Р2 /g*wrn = Р2 /g*( r 1 + r2 )w2
Вращательная сила инерции в относительном движении Jrτ = -Р2 /g*wr τ равна нулю, так как кривошип вращается равномерно.Применив дифференциальные уравнения переносного поступательного движения материальной системы в проекциях на оси х и у:
Мхе =∑ Fkx e + ∑ Jrkx , Муе = ∑ Fky e + ∑ Jrky ,
k =1 k =1 k =1 k =1
получим
Mx e = Rx + Jrn coswt , Mye = Re — P 1 — P 2 + Jrn sinwt ,
Так как х e = х1 ,ye =y1 , Jrn =P2 /g*(r1 +r2 ) w 2 , то
Мх 1 =Rx +P2 /g(r1 +r2 )w2 coswt , (10)
My1 =Ry -P1 - Р 2 +P2 /g (r1 + r2 ) w2 sinwt. (11)
В случае механизма, закрепленного болтами, центр тяжести С1 колеса 1 и станины неподвижен , т. е. х1 =у1 = 0, и дифференциальные уравнения принимают вид
Rx +P2 /g(r1 +r2 )w2 coswt =0, (12)
Ry- -P1 - Рг +P2 /g (r1 + r2 ) w2 sinwt , (13)
откуда вытекает, что проекция нормальной реакции плоскости равна
Ry = P1 - Рг +P2 /g (r1 + r2 ) w2 sinwt. (14)
Проекция на ось х горизонтальной силы реакции болтов равна
Rx = P2 / g (r1 +r2 )w2 coswt. (15)
Условие подпрыгивания определяем из (14), считая R у min отрицательным. Так как
Rymin = P 1 + Рг - P 2 / g *( r 1 + r 2 ) w 2 , а Ry min <0 , то
P 1 +Р2 - P 2 / g *( r 1 + r 2 ) w 2 < 0
откудаw >√ g *( P 1 + P 2 )/( P 2 ( r 1 + r 2 ))
Для определения закона движения центра тяжести CL колеса 1 истанины механизма после среза болтов надо в формуле (10) положить Rx = 0. Тогда
Мх1 = P 2 / g *( r 1 + r 2 ) w 2 coswt ,
Т.е. приходим к уравнению (9):
x1 =P2 /(P1 + P2 )*(r1 + r2 ) w2 cos wt ,
решение которого было получено выше.
На основе разработанного алгоритма решения задачи по кинематике составим Паскаль – программу.
Program DINAMIKA;
Var
w,r1,r2,P1,P2,t,NxMax,Ny,x1:Real;
Const
g=9.8;
Begin
Writeln ('vvedite radius r1');
Readln (r1);
Writeln ('vvedite radius r2');
Readln (r2);
Writeln ('vvedite ves P1');
Readln (P1);
Writeln ('vvedite ves P2');
Readln (P2);
Writeln ('vvedite vremya');
Readln (t);
w:=sqrt((g*(P1+P2))/(P2*(r1+r2)));
Ny:=P1+P2-(P2/g)*(r1+r2)*w*w*cos(w)*t;
NxMax:=P2/g*(r1+r2)*w*w;
x1:=P2/P1+P2*(r1+r2)*(1-cos(w)*t);
Writeln ('w:=',w);
Writeln ('Ny:=',Ny:8:6);
Writeln ('NxMax:=',NxMax:8:6);
Writeln ('x1:=',x1:8:6);
Readln ;
E nd.
ЗАКЛЮЧЕНИЕ
Цельюкурсовой работы являлась изучение полного спектра функциональных возможностей языка программирования Паскаль для решения задач прикладной механики.
Задачамиданной работы являлись:
1. Освоение полного спектра функциональных возможностей языка программирования Паскаль;
2. Постановка и решение задач прикладной механики традиционным способом;
3. Решение задач механики в среде языка программирования Паскаль.
Методами работыпри выполнении поставленных задач:
1. Теоретический анализ научно-технической литературы по языку программирования Паскаль;
2. Математическое моделирование задач прикладной механики;
3. Компьютерное решение задач прикладной механики.
На основе проведенного курсового исследования на тему «Приложения технологии языка программирования паскаль в прикладной механике» можно сформулировать следующие выводы:
1. Язык программирования высокого уровня Паскаль обладает широким спектром логических конструкций и функций, необходимых для успешного решения задач прикладной механики.
2. Информационное моделирование механических явлений средствами логики и высшей математики позволяет достаточно быстро перевести решение задач прикладной механики на уровень компьютерных вычислений посредством языка программирования Паскаль.
ЛИТЕРАТУРА
1. Бать М.И., Джанелидзе Г., Кельзон А.С. Теоретическая механика в примерах и задачах. Т.1. М.: Просвещение, 2000.
2. Бать М.И., Джанелидзе Г., Кельзон А.С. Теоретическая механика в примерах и задачах. Т.2. М.: Просвещение, 2000.
3. Бочкин А. И. Методика преподавания информатики. - Минск: Высшая школа, 1998.
4. Блашкин И.И., Буров А.А. Новые возможности Turbo-Pascal 6.0. — Спб.: Изд-во «Макет», 1992.
5. Бородич Ю.С. и др. Паскаль для персональных компьютеров: Справ. пособие/ Ю.С.Бородич, А.Н.Вальвачев, А.И.Кузьмич. — Мн.: Выш. шк.: БФ ГИТМП «НИКА», 1991.
6. Васильев П.П. Турбо Паскаль — мой друг: М.: Компьютер, ЮНИТИ, 1995.
7. Великов В.П ., Новая информатика в школе // Информатика и образование. – 1986. - №1.
8. Вычислительная техника и программирование. Под редакцией А. В. Петрова М. , Высшая школа, 1990.
9. Голубева О.В. Теоретическая механика. Изд-во «Высшая школа». М.: 1968.
10. Донцов Д.А. Самые нужные программы для Windows. Популярный самоучитель.- Спб.: Питер, 2006.
11. Джордейн Р. Справочник программиста персональных компьютеров типа IBM PC, XT, AT: Пер. с англ./ Предисл. Н.В.Гайского. — М.: Финансы и статистика, 1991.
12. Зозуля Ю. Компьютер на 100 % - Спб.: Питер, 2006.
13. Зуев Е.А. Язык программирования Turbo Pascal 6.0. — М.: Унитех, 1992.
14. Информатика. Базовый курс: Учеб. пособ. для студентов технических вузов / С.В. Симонович, Г. Евсеев, В. И. Мухаровский и др. ; под ред. Симоновича – Спб.: Питер, 2005.
15. Информатика: Учеб. пособ. для пед. спец. вузов /А.Р. Есаян, В.И. Ефимов, Л.П. Липецкая и др. - М.: Просвещение, 1991.
16. Лапчик М. П. Методика преподавания информатики. М.: Посвещение,2001.
17. Левин А. Самоучитель полезных программ 3-е изд.- Спб.: Питер, 2003.Турбо Паскаль 7.0 - К.: Издательская группа BHV, 1998.
18. Марченко А. И., Марченко Л. И. Программирование в среде Turbo-Pascal 7.0-М., Бином Универсал, К.: Юниор, 1997.
19. Мизрохи А.М. Turbo Pascal и объектно-ориентированное программирование. — М.: Финансы и статистика, 1992.
20. Немнюгин С.А. Turbo Pascal. Программирование на языке высокого уровня. Учебник для вузов. 2-е изд.- Спб.: Питер, 2005.
21. Рывкин К.А. Справочник школьника по информатике. 7-11 кл. - М.: ООО Изд. дом «Оникс 21 век », 2005.
22. Справочник по процедурам и функциям Borland Pascal with Objects 7.0. — Киев: «Диалектика», 1993.
23. Фарафонов В.В. Турбо Паскаль 7.0. Начальный курс: учеб. пособие. - М.: Кнорус, 2006.
24. Фёдоров А. Особенности программирования на Borland Pascal. — Киев: «Диалектика», 1994.
25. Хершель Р. Турбо Паскаль/ 2-е изд., перераб. — Вологда: МП «МИК», 1991.
26. POWER TOOLS PLUS. Процедуры поддержки для Turbo Pascal 4.0.: Справочное руководство пользователя. Техническая документация.