| Скачать .docx |
Курсовая работа: Синтез астатических систем
Федеральное агентство по образованию РФ
ГОУ ВПО
"Московский Государственный Текстильный Университет им. А.Н. Косыгина"
ФИТАЭ
Кафедра автоматики и промышленной электроники
Курсовая работа
Тема: "Синтез астатических систем"
Дисциплина: "Теория Автоматического Управления"
Москва 2009
Исходные данные:

ПИ-закон
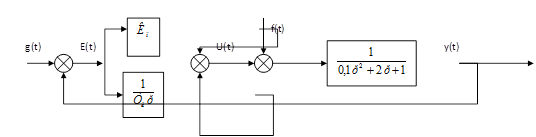
1. По заданной системе уравнений получить передаточную функцию объекта управления и составить структурную схему замкнутой САУ, считая регулятор звеном с входной величиной Е, выходной U и передаточной функцией ![]()


![]()
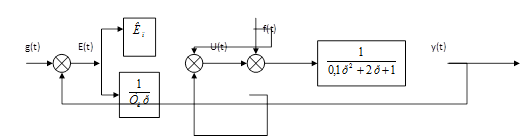
2. Выбрать регулятор таким образом, чтобы система обладала свойством астатизма по отношению к постоянному задающему g(t) и возмущающему f(t) воздействию.
Для того чтобы система обладала астатизмом необходимо выполнение условия – величина установившейся ошибки по заданию и возмущению должна быть равна 0. Проверим это условие на регуляторах:
· Выбираем П – регулятор


Т.к. величина установившейся ошибки не равна нулю, то система не обладает астатизмом,, а следовательно считать ошибку по каналу f-E нет необходимости.
· Выбираем И – регулятор

![]()

Обе ошибки равны нулю следовательно система с И - регулятором является астатической. Данный регулятор нам подходит
· Проверим наш ПИ – регулятор

Система так же является астатической, что является тем, что выбранный нами ПИ – регулятор подходит к условию задания.
3. Найти область значений постоянной времени регулятора для И – закона управления, обеспечивающих устойчивость системы.

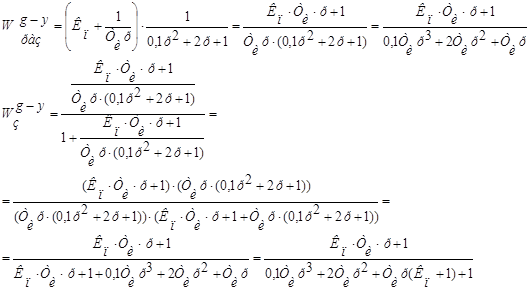
Найдем передаточную функцию замкнутой системы по каналу g-y и затем выделим ее характеристическое уравнение.

Характеристическое уравнение Q(p):
![]()
Уравнение 3 порядка, следовательно, для устойчивости системы необходимо чтобы произведение внутренних коэффициентов характеристического уравнения было больше произведения внешних коэффициентов.

Следовательно область значений ![]() для И – закона можно определить интервалом
для И – закона можно определить интервалом ![]() .
.
4. Для И – закона регулирования найти минимальную возможную величину установившейся ошибки, если g(t)=2t и f(t)=-3t.
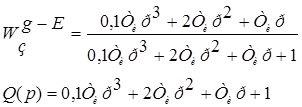
Для определения минимальной установившейся ошибки нам необходимо узнать при каком значении постоянной времени система находится на границе устойчивости. Для этого отыщем передаточную функцию и характеристическое уравнение системы с И – регулятором. И затем найдем значение ![]()

![]()
Находим значение постоянной времени на границе устойчивости:

Найдем величину установившейся ошибки при g(t)=2t и f(t)=-3t
![]()

Поскольку задающее воздействие у нас g(t)=2t, то используя преобразование Лапласа получаем:

![]()
тогда величина установившейся ошибки будет

Подставляем полученное значение ![]() и получаем
и получаем
![]()
Найдем ошибку по каналу f-E


Подставляем ![]() и получаем
и получаем ![]()
Тогда![]()
5. Построить, с использованием ЭВМ, область устойчивости, на плоскости, параметров регулятора при использовании ПИ – закона, обосновать возможность и путь получения допустимой установившейся ошибки при ![]() и
и ![]() .
.
Для построение области устойчивости необходимо найти характеристическое уравнение передаточной функции для данного регулятора.


Отсюда:
![]()
Запишем условие, при котором система находится на границе устойчивости:
![]()
Выразим зависимость
![]() от
от ![]()

Строим область устойчивости по по лученной зависимости:

| Ти | Кп |
| 0,01 | 4,00 |
| 0,02 | 1,50 |
| 0,03 | 0,67 |
| 0,04 | 0,25 |
| 0,05 | 0,00 |
| 0,06 | -0,17 |
| 0,07 | -0,29 |
| 0,08 | -0,38 |
| 0,09 | -0,44 |
Таким образом выбирая значения параметров регулятора над границей устойчивости – мы получаем устойчивую систему, и наоборот.
6. Вычислить значения параметров ПИ – регулятора, обеспечивающих устойчивость и установившуюся ошибку в системе = 0,06 при g(t)=2t и f(t)=0

Поскольку возмущение f(t)=0, то ![]() . Найдем
. Найдем ![]() :
:
для этого найдем передаточную функцию замкнутой системы по каналу g-E

По условию ![]() , тогда подставим это значение в получившееся выражение:
, тогда подставим это значение в получившееся выражение:

Таким образом для получения в системе установившейся ошибке равной 0,06 необходимо задать параметру постоянной времени значение 0,03.
7. Для интегрального закона регулирования и начальных условий ![]() , выбрать оптимальное значение постоянной времени регулятора по критерию:
, выбрать оптимальное значение постоянной времени регулятора по критерию: ![]() (Рассматривается движение в системе при g(t)=f(t)=0 и ненулевых начальных условиях).
(Рассматривается движение в системе при g(t)=f(t)=0 и ненулевых начальных условиях).
Для решения мы будем использовать метод Мондельштама. Для этого нам необходимо найти передаточную функцию замкнутой системы и взять характеристическое уравнение:
Получаем уравнение:
![]()
Поочередно умножаем его на ![]() и на Е
и на Е

Интегрируем полученное уравнение по частям

Получаем:


Интегрируем полученное уравнение по частям

Получаем:

Из полученных уравнений составим систему уравнений:


Выбираем ![]() =1,054
=1,054
8. Для найденного в пункте 7 значения постоянной времени регулятора построить с помощью ЭВМ вещественную частотную характеристику P(ω), приняв входным воздействием g(t) и входной координатой E(t)/
Для нахождения вещественной характеристики нам понадобится передаточная функция замкнутой системы по каналу g-y.

Перейдем в частотную область p=jω:

Домножаем на сопряженное знаменателю число и получаем:

Отделяем действительную часть U(ω):

При ![]() =1,054
=1,054

| w | p(w) |
| 0 | 1 |
| 0,1 | 1,010058 |
| 0,2 | 1,039191 |
| 0,3 | 1,079471 |
| 0,4 | 1,099022 |
| 0,5 | 0,997092 |
| 0,6 | 0,58593 |
| 0,7 | -0,06976 |
| 0,8 | -0,48243 |
| 0,9 | -0,56794 |
| 1 | -0,5208 |
| 1,1 | -0,44696 |
| 1,2 | -0,3782 |
| 1,3 | -0,32081 |
| 1,4 | -0,27428 |
| 1,5 | -0,23666 |
| 1,6 | -0,20606 |
| 1,7 | -0,18095 |
| 1,8 | -0,16013 |
| 1,9 | -0,14269 |
| 2 | -0,12796 |
| 2,5 | -0,08003 |
| 3 | -0,05481 |
| 3,5 | -0,03991 |
| 4 | -0,03037 |
| 4,5 | -0,02389 |
| 5 | -0,01929 |
| 5,5 | -0,0159 |
| 6 | -0,01334 |

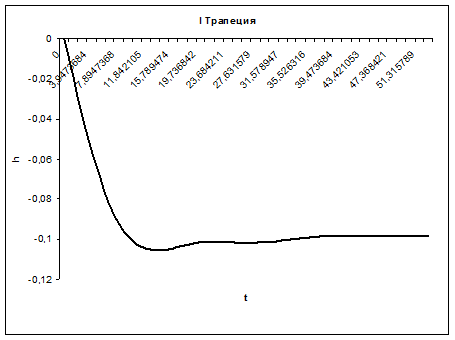
9. По вещественной характеристике P(ω) пункта 8 построить переходной процесс E(t) при единичном ступенчатом изменении g(t) и нулевых начальных условиях методом трапециидальных частотных характеристик.
Для построения переходного процесса нам необходимо разбить получившуюся вещественную характеристику на трапеции и построить переходный процесс для каждой из полученных трапеций.
| R(0) | Wo | Wd | æ | ||
| I | - | 0,099021688 | 0,38 | 0,1 | 0,263158 |
| II | + | 1,666965285 | 0,88 | 0,43 | 0,488636 |
| III | - | 0,567943597 | 6 | 0,95 | 0,158333 |

1-я трапеция
| t табл | h(æ) | t=t табл/Wo | h=R(0)*h(æ) |
| 0 | 0 | 0 | 0 |
| 0,5 | 0,199 | 1,315789474 | -0,019705316 |
| 1 | 0,386 | 2,631578947 | -0,038222372 |
| 1,5 | 0,56 | 3,947368421 | -0,055452145 |
| 2 | 0,709 | 5,263157895 | -0,070206377 |
| 2,5 | 0,833 | 6,578947368 | -0,082485066 |
| 3 | 0,928 | 7,894736842 | -0,091892127 |
| 3,5 | 0,994 | 9,210526316 | -0,098427558 |
| 4 | 1,039 | 10,52631579 | -0,102883534 |
| 4,5 | 1,057 | 11,84210526 | -0,104665924 |
| 5 | 1,067 | 13,15789474 | -0,105656141 |
| 5,5 | 1,067 | 14,47368421 | -0,105656141 |
| 6 | 1,054 | 15,78947368 | -0,104368859 |
| 6,5 | 1,043 | 17,10526316 | -0,103279621 |
| 7 | 1,035 | 18,42105263 | -0,102487447 |
| 7,5 | 1,025 | 19,73684211 | -0,10149723 |
| 8 | 1,024 | 21,05263158 | -0,101398209 |
| 8,5 | 1,022 | 22,36842105 | -0,101200165 |
| 9 | 1,025 | 23,68421053 | -0,10149723 |
| 9,5 | 1,027 | 25 | -0,101695274 |
| 10 | 1,027 | 26,31578947 | -0,101695274 |
| 10,5 | 1,028 | 27,63157895 | -0,101794295 |
| 11 | 1,025 | 28,94736842 | -0,10149723 |
| 11,5 | 1,021 | 30,26315789 | -0,101101144 |
| 12 | 1,015 | 31,57894737 | -0,100507013 |
| 12,5 | 1,01 | 32,89473684 | -0,100011905 |
| 13 | 1,005 | 34,21052632 | -0,099516797 |
| 13,5 | 1 | 35,52631579 | -0,099021688 |
| 14 | 0,997 | 36,84210526 | -0,098724623 |
| 14,5 | 0,996 | 38,15789474 | -0,098625601 |
| 15 | 0,995 | 39,47368421 | -0,09852658 |
| 15,5 | 0,995 | 40,78947368 | -0,09852658 |
| 16 | 0,995 | 42,10526316 | -0,09852658 |
| 16,5 | 0,995 | 43,42105263 | -0,09852658 |
| 17 | 0,995 | 44,73684211 | -0,09852658 |
| 17,5 | 0,995 | 46,05263158 | -0,09852658 |
| 18 | 0,995 | 47,36842105 | -0,09852658 |
| 18,5 | 0,994 | 48,68421053 | -0,098427558 |
| 19 | 0,992 | 50 | -0,098229515 |
| 19,5 | 0,991 | 51,31578947 | -0,098130493 |
| 20 | 0,991 | 52,63157895 | -0,098130493 |
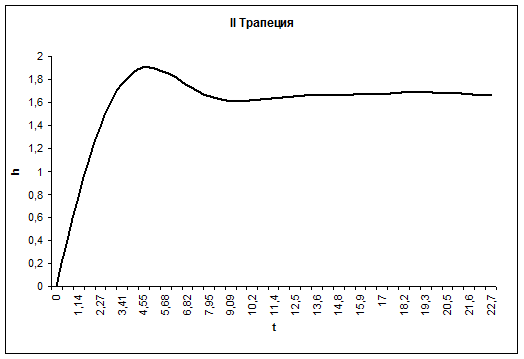
2-я трапеция
| t табл | h(æ) | t=t табл/Wo | h=R(0)*h(æ) | |
| 0 | 0 | 0 | 0 | |
| 0,5 | 0,24 | 0,568181818 | 0,400071669 | |
| 1 | 0,461 | 1,136363636 | 0,768470997 | |
| 1,5 | 0,665 | 1,704545455 | 1,108531915 | |
| 2 | 0,833 | 2,272727273 | 1,388582083 | |
| 2,5 | 0,967 | 2,840909091 | 1,611955431 | |
| 3 | 1,061 | 3,409090909 | 1,768650168 | |
| 3,5 | 1,115 | 3,977272727 | 1,858666293 | |
| 4 | 1,142 | 4,545454545 | 1,903674356 | |
| 4,5 | 1,138 | 5,113636364 | 1,897006495 | |
| 5 | 1,118 | 5,681818182 | 1,863667189 | |
| 5,5 | 1,092 | 6,25 | 1,820326092 | |
| 6 | 1,051 | 6,818181818 | 1,751980515 | |
| 6,5 | 1,018 | 7,386363636 | 1,696970661 | |
| 7 | 0,993 | 7,954545455 | 1,655296528 | |
| 7,5 | 0,974 | 8,522727273 | 1,623624188 | |
| 8 | 0,966 | 9,090909091 | 1,610288466 | |
| 8,5 | 0,966 | 9,659090909 | 1,610288466 | |
| 9 | 0,97 | 10,22727273 | 1,616956327 | |
| 9,5 | 0,975 | 10,79545455 | 1,625291153 | |
| 10 | 0,982 | 11,36363636 | 1,63695991 | |
| 10,5 | 0,987 | 11,93181818 | 1,645294737 | |
| 11 | 0,993 | 12,5 | 1,655296528 | |
| 11,5 | 0,997 | 13,06818182 | 1,66196439 | |
| 12 | 0,997 | 13,63636364 | 1,66196439 | |
| 12,5 | 0,997 | 14,20454545 | 1,66196439 | |
| 13 | 0,997 | 14,77272727 | 1,66196439 | |
| 13,5 | 0,998 | 15,34090909 | 1,663631355 | |
| 14 | 1 | 15,90909091 | 1,666965285 | |
| 14,5 | 1,002 | 16,47727273 | 1,670299216 | |
| 15 | 1,005 | 17,04545455 | 1,675300112 | |
| 15,5 | 1,008 | 17,61363636 | 1,680301008 | |
| 16 | 1,011 | 18,18181818 | 1,685301904 | |
| 16,5 | 1,011 | 18,75 | 1,685301904 | |
| 17 | 1,012 | 19,31818182 | 1,686968869 | |
| 17,5 | 1,009 | 19,88636364 | 1,681967973 | |
| 18 | 1,008 | 20,45454545 | 1,680301008 | |
| 18,5 | 1,006 | 21,02272727 | 1,676967077 | |
| 19 | 1,001 | 21,59090909 | 1,668632251 | |
| 19,5 | 0,998 | 22,15909091 | 1,663631355 | |
| 20 | 0,996 | 22,72727273 | 1,660297424 | |
3-я трапеция
| t табл | h(æ) | t=t табл/Wo | h=R(0)*h(æ) |
| 0 | 0 | 0,0000 | 0,0000 |
| 0,5 | 0,184 | 0,0833 | -0,1045 |
| 1 | 0,256 | 0,1667 | -0,1454 |
| 1,5 | 0,516 | 0,2500 | -0,2931 |
| 2 | 0,655 | 0,3333 | -0,3720 |
| 2,5 | 0,833 | 0,4167 | -0,4731 |
| 3 | 0,863 | 0,5000 | -0,4901 |
| 3,5 | 0,928 | 0,5833 | -0,5271 |
| 4 | 0,974 | 0,6667 | -0,5532 |
| 4,5 | 0,977 | 0,7500 | -0,5549 |
| 5 | 1,012 | 0,8333 | -0,5748 |
| 5,5 | 1,019 | 0,9167 | -0,5787 |
| 6 | 1,013 | 1,0000 | -0,5753 |
| 6,5 | 1,009 | 1,0833 | -0,5731 |
| 7 | 1,006 | 1,1667 | -0,5714 |
| 7,5 | 1,006 | 1,2500 | -0,5714 |
| 8 | 1,008 | 1,3333 | -0,5725 |
| 8,5 | 1,01 | 1,4167 | -0,5736 |
| 9 | 1,016 | 1,5000 | -0,5770 |
| 9,5 | 1,022 | 1,5833 | -0,5804 |
| 10 | 1,025 | 1,6667 | -0,5821 |
| 10,5 | 1,028 | 1,7500 | -0,5838 |
| 11 | 1,029 | 1,8333 | -0,5844 |
| 11,5 | 1,027 | 1,9167 | -0,5833 |
| 12 | 1,025 | 2,0000 | -0,5821 |
| 12,5 | 1,022 | 2,0833 | -0,5804 |
| 13 | 1,019 | 2,1667 | -0,5787 |
| 13,5 | 1,017 | 2,2500 | -0,5776 |
| 14 | 1,016 | 2,3333 | -0,5770 |
| 14,5 | 1,015 | 2,4167 | -0,5765 |
| 15 | 1,014 | 2,5000 | -0,5759 |
| 15,5 | 1,014 | 2,5833 | -0,5759 |
| 16 | 1,014 | 2,6667 | -0,5759 |
| 16,5 | 1,014 | 2,7500 | -0,5759 |
| 17 | 1,013 | 2,8333 | -0,5753 |
| 17,5 | 1,012 | 2,9167 | -0,5748 |
| 18 | 1,011 | 3,0000 | -0,5742 |
| 18,5 | 1,009 | 3,0833 | -0,5731 |
| 19 | 1,008 | 3,1667 | -0,5725 |
| 19,5 | 1,006 | 3,2500 | -0,5714 |
| 20 | 1,005 | 3,3333 | -0,5708 |
| 20,5 | 1,004 | 3,4167 | -0,5702 |
| 21 | 1,003 | 3,5000 | -0,5696 |
| 21,5 | 1,003 | 3,5833 | -0,5696 |
| 22 | 1,002 | 3,6667 | -0,5691 |
| 22,5 | 1,002 | 3,7500 | -0,5691 |
| 23 | 1,002 | 3,8333 | -0,5691 |
| 23,5 | 1,002 | 3,9167 | -0,5691 |
| 24 | 1,001 | 4,0000 | -0,5685 |
| 24,5 | 1 | 4,0833 | -0,5679 |
| 25 | 1 | 4,1667 | -0,5679 |
| 25,5 | 0,999 | 4,2500 | -0,5674 |
| 26 | 0,999 | 4,3333 | -0,5674 |

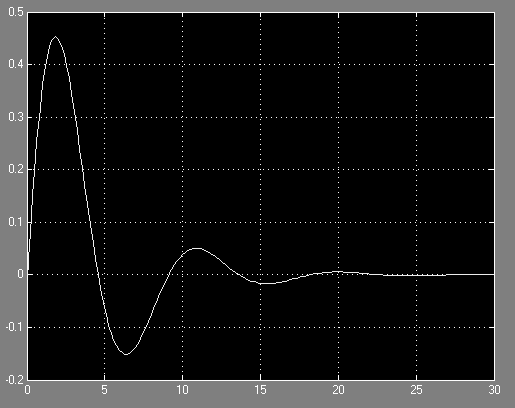
Суммируем графически полученные процесы и получаем

10. Определить время регулирования и максимальное перерегулирование в системе.
![]()

11. Разработать и начертить структурную схему комбинированной САУ, инвариантной по отношению к контролируемому возмущению ![]() .
.
Привести передаточную функцию устройства управления.
Проверить выполнение условия инвариантности.

Условия инвариантности:
 , если
, если ![]()
 , если
, если ![]()

При выборе корректирующих звеньев в виде обратных передаточных функций возникает проблема. Она обычно связана с тем, что порядок числителя корректирующего звена становится больше порядка знаменателя. Это означает, что частотные характеристики таких звеньев являются расходящимися, что говорит о том, что физически такие звенья нереализуемы. В тех случаях, когда корректирующие звенья применять необходимо, порядок числителя этих звеньев искусственно приравнивают к порядку знаменателя, отбрасывая в числители высшие порядки.
12. Предложить и обосновать методы компенсации действия неконтролируемых возмущений, если известен класс функций, которыми они описываются.
астатический автоматический управление моделирование программа

Решить проблему инвариантности можно, если известна предварительная информация о классе возмущающих воздействий. В частности, если известен математический аппарат, описывающий функцию f(t), заданный в виде решения некоторого дифференциального уравнения.
Процедура синтеза предусматривает:
1. восстановление вида дифференциального уравнения по заданному решению;
2. получение характеристического уравнения;
3. выбор передаточной функции регулятора, в которой знаменатель совпадает с видом полученного характеристического уравнения. Числитель передаточной функции регулятора выбирается того же порядка, что и знаменатель;
4. неизвестные коэффициенты числителя передаточной функции регулятора определяются из условий устойчивости замкнутой системы.
13. Провести моделирование в программе MatLab. Определить настройки регулятора, обеспечивающего минимизацию времени регулирования.

При нулевом задающем воздействии со значением регулятора, полученными в 7 пункте:
При единичном задающем воздействии:

Для снижения времени регулирования можно немного увеличить значения регулятора ![]() примерно до 1,085.
примерно до 1,085.
Так же значительно уменьшает время регулирование и ![]() введение пропорциональной составляющей, т.е. использование ПИ – регулятора. С его помощью легко можно уменьшить время регулирования примерно в 1,7 раза.
введение пропорциональной составляющей, т.е. использование ПИ – регулятора. С его помощью легко можно уменьшить время регулирования примерно в 1,7 раза.

Список используемой литературы
· Лекции по курсу ТАУ, Румянцев Ю.Д.
· "Теория автоматического управления", Воронов А.А.
· "Теория систем автоматического управления", Бесекерский В.А.
Приложение
