| Скачать .docx |
Реферат: Решение задачи одномерной упаковки с помощью параллельного генетического алго-ритма
Решение задачи одномерной упаковки с помощью параллельного генетического алгоритма
И.В. Мухлаева
Введение
В работе представлен паралелльный генетический алгоритм (ПаГА) для решения задачи одномерной упаковки. В целом эта задача является задачей разбиения множества объектов на непересекающиеся подмножества:
![]()
![]()
![]() . [1]
. [1]
В большинстве задач разбиения их решение связано с определенными налагаемыми ограничениями, в противном случае решение будет нелегальным. Вот почему элемент, как правило, не может быть объединен в одно подмножество со всеми возможными подмножествами остающихся элементов. Цель разбиения состоит в оптимизации функции стоимости, определенной на множестве всех легальных подмножеств.
Задача одномерной упаковки является широко применяемой в качестве модели распределения ресурсов разного рода. В вычислительной технике это могут быть назначение заданий на процессоры, локация памяти, форматирование таблиц и т.д. Браун [1] приводит дополнительно приложения задачи в индустрии и бизнесе.
Как известно, задача одномерной упаковки является задачей комбинаторной оптимизации и относится к классу NP-полных [2]. Поэтому для ее решения разрабатываются различные аппроксимационные, эвристические алгоритмы, позволяющие получать приемлемые по качеству результаты за приемлемое время. Однако, известные приближенные алгоритмы одномерной упаковки дают решения достаточно низкого качества. Так, оценка алгоритма FF равна
![]() [2].
[2].
Дальнейшие попытки получить приближенные алгоритмы с более высокими оценками не привели к существенным результатам [3-7]. Не удалось превысить оценку алгоритма RFF:
![]() [3, 4].
[3, 4].
Для повышения качества решения следует использовать методы комбинаторной оптимизации, обладающие механизмами выхода из локальных оптимумов и способные находить близкие к оптимальному решения. Перспективными в этом смысле являются алгоритмы, основанные на методе отжига и генетические алгоритмы (ГА).
ГА позволяют получать близкие к оптимальному решения значительно быстрее, чем метод отжига [8]. Это происходит за счет сочетания в них элементов случайного и направленного поиска. ГА работают одновременно с несколькими решениями и синтезируют новые субоптимальные решения на основе свойств достигнутых. ГА обладают механизмами избежания локальных оптимумом за счет элементов случайности.
Разработаны несколько ГА одномерной упаковки [9-11].
Разработка параллельных ГА является перспективной, поскольку распараллеливание процесса поиска позволяет сократить время решения [12].
Известны несколько параллельных генетических алгоритмов [12-14], предназначенных для решения различных оптимизационных задач.
В представленном алгоритме ПаГА за счет согласования позиций точек кроссинговера осуществляется кооперативный поиск в независимых субпопуляциях, что дополнительно снижает временные затраты. Также разработаны три вида направленной мутации, повышающей качество получаемых решений. Для усиления элементов направленности введены защищенные от деструкции фрагменты хромосом, поскольку по мере приближения решений к оптимуму возрастает деструктивность генетических операторов, основанных на принципе случайности. Дополнительно для сокращения времени решения предложена эвристика, сокращающая объем данных для ГА.
Для исследования предложенного алгоритма разработано ПО на языке С++ для IBM PC. Проведены статистические исследования, подтверждающие эффективность ПаГА.
1. Параллельный генетический алгоритм
1.1. Постановка задачи
Рассмотрим задачу одномерной упаковки в следующей постановке.
Дано: множество элементов E={e1 , e2 , ... , en }, имеющих размеры S(E)={s(e1 ), s(e2 ), ... , s(en )}, и множество блоков B={b1 , b2 , ... , bm }, имеющих размеры S(B)={s(b1 ), s(b2 ), ... , s(bm )}.
Цель: разместить элементы в имеющиеся блоки, заполняя каждый из блоков до максимально возможного уровня и минимизируя общее количество заполненных блоков.
1.2. Функция стоимости
Для работы ГА необходимо определить функцию стоимости, в соответствии с которой будут оцениваться решения. Целью решения определена минимизация площади, занятой размещенными в блоках элементами. Соответственно, необходимо найти способ ее оценки. Будем считать, что в идеальном случае (верхняя оценка) площадь, занятая элементами, равна сумме их размеров:

Площадь, занятая элементами при каждом конкретном размещении, определяется следующим образом:
PS=SB * + Sr ,
где SB
*
- сумма размеров блоков, занятых элементами, кроме последнего занятого блока, Sr
- сумма размеров элементов в последнем блоке. Оценкой решения в таком случае будет коэффициент ![]() Целью решения задачи становится максимизация коэффициента C.
Целью решения задачи становится максимизация коэффициента C.
1.3. Кодирование
Среди шести принципов создания эффективных решений (см. например, [9]) фигурирует принцип минимальной избыточности: каждый элемент области поиска (в данном случае области всех легальных подмножеств) должен быть представлен минимальным (идеально - одной) числом хромосом, чтобы сократить размер области поиска ГА. Областью поиска в случае задачи одномерной упаковки является множество всех легальных (т.е. не допускающих переполнение какого-либо блока) распределений элементов в блоки.
В алгоритме использовано линейное кодирование, при котором хромосома представляет собой список элементов, где позиция элемента в списке означает очередь его на размещение в блоках. Элемент размещается в блок, если в блоке есть достаточное для этого место.
1.4. Генетические операции
1.4.1. Операторы кроссинговера
В начале работы ГА создается начальная популяция, разделенная на три субпопуляции. Независимая эволюция в субпопуляциях позволяет сохранять разнообразие генетического материала (ГМ) и вести поиск в различных направлениях. Для кооперации этого поиска были разработаны операторы кроссинговера, применение которых согласовано при коммуникации субпопуляций. Каждый оператор кроссинговера передает потомкам максимально возможный фрагмент решения, получившего высокую оценку. Для этого схема действующего кроссинговера выбирается в зависимости от схемы кроссинговера, который применялся на более низком уровне (в субпопуляции).
В первой субпопуляции используется упорядоченный оператор кроссинговера (Order crossover, OX), разработанный D. Davis в 1985г.. Во второй субпопуляции используется модификация OX, при которой считывание генов производится справа налево. Для отличия эти операторы обозначены OXL и OXR соответственно. В третей субпопуляции используется двухточечный оператор кроссинговера.
При коммуникации 1 и 2 субпопуляции используется OXL. В результате формируются два потомка, которые записываются один в 1 субпопуляцию, второй - во вторую. При коммуникации 2 и 1 субпопуляций используется OXR. Потомки записываются один во 2 субпопуляцию, второй - в 1-ю. При коммуникации 1 и 3 субпопуляции используется OXL. Потомки записываются один в 1 субпопуляцию, второй - в 3-ю. При коммуникации 3 и 1 субпопуляций используется двухточечный кроссинговер. В результате формируются два потомка, которые записываются один в 3 субпопуляцию, второй - в 1-ю. При коммуникации 2 и 3 субпопуляции используется OXR. Потомки записываются один во 2 субпопуляцию, второй - в 3-ю. При коммуникации 3 и 2 субпопуляций используется двухточечный кроссинговер. Потомки записываются один в 3 субпопуляцию, второй - во 2-ю.
1.4.2. Операторы мутации
В алгоритме использованы, кроме случайной мутации, специально разработанные проблемно-ориентированные направленная мутация. с поиском 1-1 (подстановка элемента списка в подходяшую по размеру незанятую позицию) и аправленная мутация. с поиском 2-1 (обмена позициями элементов, один из которых равен по величине сумме величин второго элемента и свободной позиции за ним).
1.4.3. Инверсия
В алгоритме использован также классический оператор инверсии.
1.5. Параллельный поиск
ПаГА работает следующим образом.
1о .Формируется начальная популяция, разделенная на три субпопуляции..
2о .В каждой субпопуляции происходит соответствующий кроссинговер.
3о . В каждой субпопуляции происходят случайная и направленные мутации и инверсия.
4о .По истечении 10 поколений происходит кроссинговер между субпопуляциями (соответствующий для каждой).
5о . Окончание работы при достижении C=1 или предела введенного пользователем числа поколений.
Одним из мотивов разделения ГА является потенциальный рост быстродействия благодаря использованию процессора или многопроцессорной системы для обработки отдельной популяции. Однако, наиболее важным мотивом является то, что после некоторого числа поколений хромосомы в отдельной популяции становятся очень похожими. Разнообразие генетического материала будет потеряно, и рекомбинация в дальнейшем может быть неэффективной. Одним из способов преодоления этой проблемы и является независимая обработка отдельных популяций. Так как ГА включают в себя элементы случайного поиска, независимая эволюция отдельных популяций будет направлять процесс в различные области пространства решений. Если оптимизируемая в каждой субпопуляции функция одна и та же, каждая субпопуляция даст конкурентоспособное, но при этом значительно отличающееся по составу ГМ решение.
Число взаимодействий между популяциями может быть критическим фактором в определениии эффективности параллельного ГА. При наличии большого числа взаимодействий преимущества использования субпопуляций оказываются потерянными, так как хорошие хромосомы из одной субпопуляции быстро попадают в другие субпопуляции, и эволюция недолго остается независимой. Результаты, полученные в исследованиях [13,14] подтверждают это положение.
При определении эффективности ПаГА необходимо учитывать эффекты, произведенные на начальную популяцию операторами кроссинговера, мутации и селекции.
Благодаря применению трех типов кросинговера в каждой из субпопуляций формируется отдельный качественный фрагмент упаковки. Синтез этих фрагментов осуществляется в процессе коммуникации между субпопуляциями, при которой в кроссинговере участвуют лучшие хромосомы.
Таким образом, хорошие свойства субоптимальных решений, полученных в независимых субпопуляциях, наследуются во всей популяции и направляют процесс поиска.
Рассмотрим эффект произведенных генетических операций [8].
Эффект мутации. Обозначим pm норму случайной мутации, одинаковую для каждого локального ГА. Тогда вероятность того, что схема S порядка n(S) во всей популяции подвергнется случайной мутации, будет равна pm n(S). В стандартном последовательном ГА вероятность того, что схема выживет, равна: 1- pm n(S). Таким образом, ПаГА в сравнении с ГА не изменяет эффект случайной мутации. Однако, учитывая, что при случайной мутации точки мутации выбираются случайно, эволюция в отдельных субпопуляциях пойдет разными путями. С ростом нормы мутации эффект, производимый ею в разных популяциях, сближается, но станет одинаковым, лишь если мутация осуществит полный перебор генов в хромосоме, что не допускается.
Эффект кроссинговера. Возьмем случайно выбранную хромосому. Вероятность того, что она подвергнется кроссинговеру, равна pc
. Характеристики потомков этой хромосомы зависят от того, какая хромосома будет выбрана в качестве второго родителя. В субпопуляции размером N у всякого другого индивида есть ![]() шансов быть выбранным в качестве второго родителя.
шансов быть выбранным в качестве второго родителя.
Эффективность ГА определяется нормой выживания схемы. Важно определить, какой эффект на выживаемость схемы имеет выбор индивида для кроссинговера. Вероятность выбора индивида в субпопуляции равна pc
, вероятность выбора индивида в начальной популяции - pc
. Тогда для локального ГА и ПаГА вероятность того, что схема S некоторой длины d(S) выживет после кроссинговера, равна ![]() , где L - длина схемы. Норма выживания схемы в ПаГА отличается от нормы выживания схемы в ГА, что определяется распределенной природой селекции и коммуникацией генетической информации. Средний или плохой по качеству для одной субпопуляции индивид может быть хорошим для другой субпопуляции.
, где L - длина схемы. Норма выживания схемы в ПаГА отличается от нормы выживания схемы в ГА, что определяется распределенной природой селекции и коммуникацией генетической информации. Средний или плохой по качеству для одной субпопуляции индивид может быть хорошим для другой субпопуляции.
2. Статистические исследования
2.1. План экспериментов
С использованием разработанного ПО исследовались следующие зависимости. Зависимость времени работы алгоритма от количества элементов, динамика качества решений в поколениях и зависимости этих показателей от весовых распределений элементов. Исследования проводились с доверительной вероятностью 75%, размер серии эксперимента 33, на IBM 486 DX/2 66.
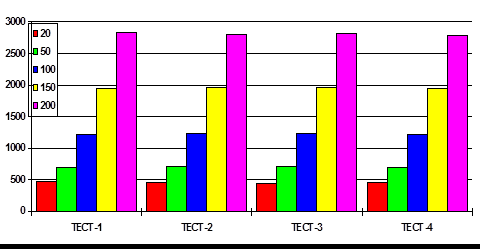
Для исследования использовались наборы данных по 20, 50, 100, 150, 200 элементов при четырех весовых распределениях; вид весовых распределений элементов представлен ниже.
Вид тестов на 200 элементов.

3.2. Результаты экспериментов
Зависимости времени от числа элементов при разных типах данных (цвет означает соответствующее количество элементов).
Проведенные исследования показали, что зависимость времени от количества элементов при всех распределениях не достигает квадратной степени при размерах задачи до 200 элементов, что доказывает практическую ценность разработанного алгоритма.
Зависимости качества от числа поколений на разных тестах:(в скобках указаны количества элементов, цвет означает число поколений).

Результаты проведенных исследований показывают, что наиболее плотная упаковка при всех количествах элементов достигается при четвертом типе весового распределения. Второе и третье распределения дают приблизительно равные результаты.
3.3. Сравнение с известными результатами
Было проведено сравнеие разработанного ПаГА с простым ГА (ПГА). Результаты сравнения сведены в таблицу. Они показывают, что ПаГА на всех тестах достиг оптимума и, таким образом, имеет значительное превышение качества решения при незначительном превышении затраченного времени.
| Алгоритм | Кол-во эл-тов |
весовое рапред. |
размер попул. |
кол-во покол. |
время решения |
качество |
| ПГА | 20 | тест -1 | 20 | 25 | 660 | 0.8544 |
| ПаГА | 20 | тест-1 | 20 | 11 | 517 | 1 |
| ПГА | 20 | тест-2 | 20 | 25 | 660 | 0.8686 |
| ПаГА | 20 | тест-2 | 20 | 9 | 407 | 1 |
| ПГА | 20 | тест-3 | 20 | 25 | 412 | 0.8193 |
| ПаГА | 20 | тест-3 | 20 | 6 | 264 | 1 |
| ПГА | 20 | тест-4 | 20 | 25 | 412 | 0.8418 |
| ПаГА | 20 | тест-4 | 20 | 9 | 410 | 1 |
Список литературы
Brown A.R. Optimal Packing and Depletion. American Elsevier, New York, 1971.
Гэри М., Джонсон Д. Вычислительные машины и труднорешаемые задачи.-М.: Мир, 1982. - 416с.
Yao A.C. New algorithms for bin packing. Report NoSTAN-CS-78-662. Computer Science Dept., Stanford University, Stanford, CA, 1978.
Chi-Chin Yao. A new algorithm for bin packing J. of the ACM, Vol.27, No.2, 1980.
Johnson D.S., Demers A., Ullmans J.D. and oth. Worts-case performance bounds for simple one-dimensional packing algorithms. SIAM J. Comput., vol.3, No. 4, 1974.
Kao C.-Y., Lin F.-T. A statistic approach for the one-dimensional bin-packing problems. In Proceedings of the 1992 IEEE International Conference on Systems, Man, and Cybernetics, vol. 2, 1545-1551. Chicago,IL, 1992.
Garey M.R., Graham R.L., Johnson D.S., Yao A.C. Resource constrained scheduling as generalized bin packing. J. Combinatorial Theory Ser. A21, pp. 257-298.
Goldberg D.E., Genetic Algorithms in Search, Optimization and Machine Larning. Addison-Wesley Publishing Company, Inc. 1989. -354p.
Falkenauer E., Delchambre A. A Genetic Algorithm for Bin Packing and Time Balancing. In: Proc. of the IEEE 1992 International Conference on Robotics and Automation (RA92), Nice, 1992.
Kroger B. Genetic algorithms for bin packing problems. In Stender J. (Ed.) Parallel Genetic Algorithms. IOS Press, Amsterdam, 1993.
Goodman E.D., Tetelbaum A.Y., Kureichik V.M. Genetic Algorithm Approach to Compaction, Bin Packing and Nesting Problems, Technical Report N# 940502, MSU, East lansing,USA, 1994.
Muhlenbein H., Schomisen M., Born J. The Parallel Genetic Algorithm as Function Optimizer. Proc. of the Fourth International Conference on Genetic Algorithms. San Mateo. Morgan Kaufman, 1991. -576p.
Muhlenbein H. Parallel Genetic Algorithms, Population Genetics and Combinatorial Optimization. Proc. of the Third International Conference on Genetic Algorithms. San Mateo. Morgan Kaufmann, 1989. -576p.
Tanese R. Distributed Genetic Algorithms. In J.D.Schaffer (Ed.) Proceedings of the Third International Conference on Genetic Algorithms. Morgan Kaufmann, San Mateo, CA, 1989.
Митропольский А.К. Техника статистических исследований.- М., «Наука», 1971. - 218с.
Применение математических методов и ЭВМ. Планирование и обработка результатов эксперимента: Учеб. пособие./ Под общ. ред. Останина А.Н.- Минск.: Вышэйшая школа., 1989. - 237с.
Адлер Ю.П. Планирование эксперимента при поиске оптимальных условий.-М.: Наука, 1971. - 283с.