| Скачать .docx |
Реферат: Применение и принципы радиоуправления
Содержание
Введение
1. Виды управления
2. Телеуправление
3. Самонаведение
4. Радиовзрыватель
Заключение
Список литературы
Введение
Радиоуправление - наука, изучающая принципы действия, математическое описание, методы анализа качества работы и синтез систем управления объектами при помощи радиоволн.
В системах радиоуправления при передаче команды от оператора (диспетчера) к объекту код команды, набранной оператором на пульте управления, преобразуется в последовательность электрических импульсов, а затем при помощи модуляции (фазовой, амплитудной, частотной модуляции и т.д.) — в радиосигнал. Для повышения надёжности радиоуправления применяют различные помехоустойчивые коды, в том числе корректирующие коды, а также контроль по методу обратного канала, когда от объекта к пункту управления передаются сигналы, подтверждающие приём и исполнение (либо только приём, либо только исполнение) команды. В некоторых системах (например, в системах управления полётом ракет, беспилотных летательных аппаратов) управление производится непрерывно при помощи автоматически получаемого сигнала рассогласования между заданным и истинным (текущим) положениями объекта управления.
1. Виды управления
К концу второй мировой войны ![]() Германия намного опережала все другие страны в создании управляемых снарядов. Немцы первыми применили снабженные реактивными двигателями, управляемые по радио планирующие авиабомбы против сил флота западных союзников. Первой такой бомбой была снабженная реактивным двигателем авиабомба Хеншель-293 (Hs-293) класса “воздух – земля”. По существу этот управляемый снаряд являлся обычной авиабомбой, вмонтированной в фюзеляж небольшого самолета, который был снабжен подвесным реактивным двигателем. Впервые планирующая авиабомба была применена в 1943 г. в Бискайском заливе и в Средиземном море против десантных судов, обеспечивавших высадку войск союзников. Вследствие небольших размеров и высокой скорости полета снаряд почти не поддавался перехвату. Поскольку пилот самолета-носителя мог осуществлять управление снарядом на всем протяжении его полета, эффективность действия снаряда была очень высокой.
Германия намного опережала все другие страны в создании управляемых снарядов. Немцы первыми применили снабженные реактивными двигателями, управляемые по радио планирующие авиабомбы против сил флота западных союзников. Первой такой бомбой была снабженная реактивным двигателем авиабомба Хеншель-293 (Hs-293) класса “воздух – земля”. По существу этот управляемый снаряд являлся обычной авиабомбой, вмонтированной в фюзеляж небольшого самолета, который был снабжен подвесным реактивным двигателем. Впервые планирующая авиабомба была применена в 1943 г. в Бискайском заливе и в Средиземном море против десантных судов, обеспечивавших высадку войск союзников. Вследствие небольших размеров и высокой скорости полета снаряд почти не поддавался перехвату. Поскольку пилот самолета-носителя мог осуществлять управление снарядом на всем протяжении его полета, эффективность действия снаряда была очень высокой.
Западные союзники не замедлили начать разработку управляемых авиабомб, и уже с февраля 1944 г. Великобритания и США начали применять подобное оружие.
В СССР была создана неуправляемая ракетная авиабомба, обладавшая высокой точностью попадания и способная уничтожать бронемашины и танки противника. Она была использована во время Сталинградской битвы и, по утверждению зарубежных специалистов, сыграла не последнюю роль в разгроме немцев. Ракетные авиабомбы подвешивались под крыльями истребителя-штурмовика ИЛ-2 по две на каждом самолете. Их эффективность определялась высокой скоростью при подлете к цели.
К концу второй мировой войны в Германии велась разработка целой серии управляемых снарядов, однако большинство из них остались не запущенными в производство. Некоторые снаряды управлялись по проводам, другие имели автономное гироскопическое управление и даже телевизионные средства (Hs-296). Радиоуправляемый снаряд Hs-298 класса “воздух – воздух” был спроектирован в начале 1944 г., и, хотя массовое производство его было запланировано на 1945 г., немцы не успели к концу войны ни завершить его разработку, ни провести испытания.
В те же годы были отработаны и основные методы управления летательными аппаратами.
Рассмотрим возможные методы управления.
В процессе управления задействованы три объекта: пункт управления, находящийся вне управляемого объекта, и поэтому названный внешним; управляемый объект – снаряд (летательный аппарат) и цель. В зависимости от взаимодействия между ними во время полета снаряда возможны три вида управления: автономное управление, телеуправление и самонаведение.
 |
радиоуправление телеуправление самонаведение радиовзрыватель
Автономное управление используется при наведении на неподвижные цели. В течение всего времени полета снаряда никакой связи между внешним пунктом управления (местом старта снаряда), управляемым объектом (снарядом) и целью нет. На самом управляемом объекте имеются все средства, необходимые для поддержания его на заданной траектории. Исходя из расположения цели и места старта, задается программа полета, и в соответствии с ней осуществляется движение управляемого объекта.
Первые системы автономного управления были инерциальными. Например, в самолете-снаряде Фау-1 (V-1) использовалась простая и остроумная система управления. В течение этапов старта и сближения самолет-снаряд Фау-1 управлялся от магнитного компаса по курсу и от барометрического высотомера по высоте. Компас устанавливался вручную на желаемый курс и удерживал ось свободного курсового гироскопа вдоль курса. В дополнение к направлению на цель снаряд должен “знать” расстояние до цели. В Фау-1 пройденное расстояние определялось при помощи воздушного лага, который состоял из пропеллера с червячной передачей на счетчик. Счетчик имел электрические контакты, которые выставлялись вручную на заранее заданное расстояние до цели. Система управления была грубая, но зато несложная в производстве.
В дальнейшем для прокладывания траектории управляемого объекта стали использоваться навигационные системы, сначала наземные (Декка, Лоран), а затем и спутниковые (GPS, ГЛОНАСС).
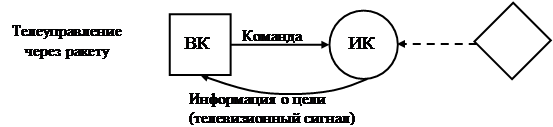
В телеуправлении (теленаведении) участвуют все три объекта. Пункт управления получает данные о координатах управляемого объекта и цели, вырабатывает команды наведения управляемого объекта на цель и передает эти команды по линии радиосвязи (командной радиолинии) на управляемый объект. Для определения координат обычно используются радиолокационные станции. Иногда определение местоположения цели осуществляется аппаратурой, расположенной на объекте управления (например, телевизионная аппаратура, предназначавшаяся для наведения немецкой крылатой ракеты Хеншель-296 (Hs-296) класса “воздух – воздух”). Тогда добавляется еще одна линия связи между управляемым объектом и пунктом управления для передачи данных измерения. Такое управление иногда называют телеуправлением через ракету
 |
В США в 1944 г была испытана управляемая бомба GB-4. Для управления ею использовались телевизионная камера и радиопередатчик, установленные внутри бомбы. Бомбардир видел местность так, как она была бы видна с бомбы, и при помощи линии передачи команд на бомбу вручную наводил ее на цель, расположенную на поверхности земли. Бомба была впервые использована в августе 1944 г. по базе подводных лодок в Гавре, а позднее – по отдельным индустриальным целям в Германии.
При самонаведении определение координат цели и выработка управляющей команды производятся на управляемом объекте; никакой связи с внешним пунктом управления нет.
Сравнивая схему самонаведения со схемой телеуправления через ракету, заметим, что они отличаются только местом выработки команды. В последней для выработки команды привлекаются мощные средства обработки результатов измерений и принятия решений, имеющиеся на пункте управления.
Во время второй мировой войны в Германии находилось в стадии разработки значительное количество приборов самонаведения. Но эти проекты до готовых образцов доведены не были (за исключением прибора для торпед ”Цаункениг”, реагирующего на звуковые колебания в воде).
В США метод самонаведения при помощи радиолокационных средств был впервые применен в планирующей бомбе “Bat”. Она представляла собой планер-моноплан, несущий на себе радиолокатор, способный автоматически следить за одиночной целью. Пока бомба еще висит под самолетом, бомбардир осуществляет захват цели при помощи радиолокатора бомбы, а затем сбрасывает ее. Бомба “Bat” была использована против японских кораблей на Тихом океане в незначительных количествах, но с хорошими результатами.
Рассмотрим теперь вопросы реализации методов управления, ограничившись телеуправлением и самонаведением.
2. Телеуправление
Телеуправление может быть реализовано двумя методами: методом командного управления и методом управления по радиолучу.
Метод командного управления был использован в первой предложенной немцами системе управления “Burgund” для снарядов класса “поверхность – воздух”.

Измерение угловых координат цели и снаряда осуществляется с помощью оптических устройств. Слежение за целью и снарядом производится операторами-наводчиками. Они сидят на поворотной платформе. Наводчик на цель старается удержать цель на перекрестии своей оптики ручками управления. Тем самым он поворачивает платформу вместе с оптикой по азимуту, а также отдельно оптику как свою, так и другого наводчика – по углу места. Наводчик снаряда ручкой управления снарядом старается совместить снаряд с перекрестием своего оптического прибора, которое соответствует направлению на цель. Для улучшения видимости снаряда предлагалось устанавливать на нем факелы. Ручка управления снарядом связана с датчиком команд, которые по командной радиолинии (радиопередатчик Kehl – радиоприемник Strassburg) передавались на борт снаряда. Как следует из этого описания, при идеальном управлении снаряд должен все время находиться на линии визирования цели. Такой метод управления называется методом накрытия цели.
Траектория, по которой будет двигаться снаряд, может быть приближенно построена следующим образом. Считаем, что цель движется прямолинейно с постоянной скоростью. Разобьем траекторию цели на ряд малых участков Ц0 Ц1 , Ц1 Ц2 , Ц2 Ц3 и т.д., которые цель пролетает за малый интервал времени Dt. Длина каждого из участков равна произведению скорости цели VЦ на интервал времени Dt. Ниже показано построение траектории снаряда.
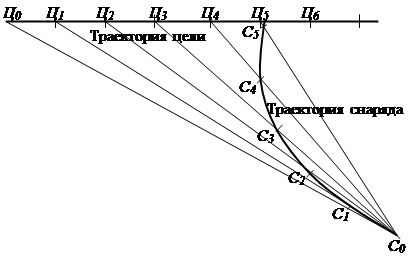 |
В момент старта снаряд находился в положении С0 , а цель – в положении Ц0 . Точка С0 соответствует месту расположения внешнего пункта управления и станции слежения за целью. Через время Dt цель переместится в точку Ц1 . Чтобы определить положение снаряда, проводим линию С0 Ц1 . Снаряд через время Dt должен находиться на этой линии, так как наведение производится по методу накрытия цели. Поэтому из точки С0 делается засечка радиусом VC Dt на линии С0 Ц1 . Получаем точку С1 . Еще через время Dt цель переместится в положение Ц2 . Снаряд должен находиться на линии “внешний пункт управления – цель”. Поэтому проводим линию С0 Ц2 и находим положение точки С2 , делая засечку из точки С1 радиусом VC Dt на линии С0 Ц2 . Продолжив такое построение для следующих точек С3 , С4 и т.д. и соединив все точки Сi плавной кривой, получим траекторию снаряда.
Метод накрытия цели характерен и для систем наведения по радиолучу. Использующаяся в этих системах радиолокационная станция следит за целью, то есть обеспечивает перемещение радиолуча вслед за перемещением цели. Как вы уже знаете после ознакомления с историей радиолокации, в первых РЛС сопровождения использовалось коническое сканирование луча. Радиолуч РЛС сопровождения представляет собой как бы пространственную воронку, ось которой совпадает с равносигнальным направлением. На оси “воронки” должна располагаться цель. На это же направление должен вывести себя и снаряд. На снаряде находится приемник, который принимает сигналы радиолокатора и определяет отклонение снаряда от равносигнального направления. По измеренному отклонению вырабатываются команды для управления снарядом.

Ясно, что, чем уже диаграмма направленности РЛС, тем точнее определение местоположения цели и снаряда, то есть точнее наведение. Но в узкий луч очень трудно попасть снаряду после старта. Поэтому РЛС сопровождения формирует два луча: узкий – для наведения снаряда на цель и широкий – для ввода снаряда в луч после старта. Переключение приемника снаряда на работу с широкого луча на узкий производится автоматически.
Но наведение по методу накрытия цели является далеко не лучшим. Посмотрим на построенную траекторию снаряда. Она криволинейная, и путь, пройденный снарядом, длиннее расстояния между точкой старта снаряда и точкой встречи снаряда с целью. Почему так получилось? Потому что снаряд все время летит прямо на цель, а не в упреждающую точку, т.е. туда, где цель будет через некоторое время. Лучше всего было бы, если бы снаряд направлялся не на цель, а в точку встречи снаряда с целью. Это была бы самая экономичная траектория.
Такой самой экономичной траектории соответствует следующий метод наведения – метод параллельного сближения. Построим траекторию снаряда для этого метода при тех же исходных условиях, что и при методе накрытия цели. Правило построения такое: линия “цель – снаряд” во время всего движения остается параллельной самой себе.
 |
Процедура построения такая же, как и для метода накрытия цели, только линия “цель-снаряд” от шага к шагу строится по-другому. Сравните траектории снаряда для рассмотренных методов. Мало того, что траектория снаряда стала короче (при данных условиях она прямолинейна), но и встреча снаряда с целью произошла раньше.
Конечно, для реализации метода параллельного сближения недостаточно знания только угловых координат цели и снаряда. Для расчета упрежденной точки встречи нужно также знать дальности до цели и снаряда и их скорости. А в систему телеуправления необходимо ввести вычислитель для выработки команды управления.

Радиолокаторы слежения за целью и слежения за снарядом автоматически определяют координаты цели и снаряда: угловые координаты, дальность и их производные. Эти данные поступают в вычислитель, который вычисляет координаты упреждающей точки, рассчитывает траекторию снаряда, определяет отклонение снаряда от расчетной траектории, т.е. ошибку наведения и формирует в соответствии с этой ошибкой команды, передаваемые по радиолинии управления на снаряд.
3. Самонаведение
Как правило, системы телеуправления не обеспечивают точности, необходимой для уничтожения цели (за исключением телеуправления через ракету). Причина в том, что с увеличением дальности увеличиваются ошибки измерения координат цели и снаряда, а это приводит к увеличению ошибок наведения. При самонаведении измеритель координат цели находится на снаряде. По мере приближения к цели ошибки измерения координат (особенно угловых!) уменьшаются, и, следовательно, ошибка наведения тоже уменьшается.
Если в системах телеуправления использовались только два типа измерителей координат: оптический (в первых попытках) и радиолокационный, то измерители координат (их также называют координаторами) в системах самонаведения более разнообразны. На рисунке на следующей странице показаны некоторые типы координаторов.
Тепловой, оптический и акустический координаторы улавливают излучение самой цели, и снаряд наводится на источник этого излучения. В радиолокационных координаторах наведение производится по радиосигналу, который излучается целью. В зависимости от того, как образуется этот радиосигнал, координаторы делятся на активные, полуактивные и пассивные. Активный координатор представляет собой РЛС слежения, в которую входит передатчик, облучающий цель, приемник, принимающий сигнал, отраженный от цели и устройство измерения координат. Полуактивный координатор содержит только приемник и устройство измерения координат, а передатчик, облучающий цель, находится в другом месте. Для пассивного координатора вообще не нужен передатчик, и координатор работает по радиоизлучению цели (работающие радиопередатчики различных радиотехнических систем и др.). Использование пассивного и полуактивного координаторов затрудняет обнаружение снаряда по его радиоизлучению

Активными и полуактивными могут быть не только радиолокационные координаторы, но и другие, например, оптические с лазерной подсветкой.

Если координатор жестко закреплен по оси снаряда, то наведение осуществляется по методу погони. Ниже построена траектория снаряда при принятых ранее условиях. Точки, определяющие положение снаряда через временные интервалы Dt, строятся как пересечение дуги радиуса VC Dt с линией, соединяющей снаряд и цель.
 |
Эту траекторию называют кривой погони, а также “собачьей кривой”, так как именно по такой траектории собака настигает свою жертву.
Недостаток такого метода наведения – большая крутизна траектории снаряда при подлете к цели. И если минимально возможный радиус разворота снаряда окажется больше радиуса окружности, описывающей траекторию на участке максимальной крутизны, то снаряд сойдет с расчетной траектории и пролетит мимо цели (пунктирная кривая на рисунке). Можно ли спрямить траекторию? Конечно можно, если направлять снаряд не на цель, а в упреждающую точку. Например, можно использовать наведение с фиксированным углом упреждения. Суть его заключается в том, что направление движения снаряда отличается от направления на цель на фиксированный угол a. Траектория снаряда при таком методе наведения построена ниже

Линия, на которой будет находиться снаряд спустя время Δt после старта, повернута относительно линии С0 Ц0 на угол α. Дугой радиуса VсΔt делаем засечку на этой линии и получаем точку С1 . Из точки С1 проводится линия, повернутая относительно линии С1 Ц1 на угол α и на ней строится точка С2 и т. д.
Сравнивая построенную траекторию снаряда с траекторией, построенной ранее для метода параллельного сближения, замечаем, что линия снаряд – цель при наведении с фиксированным углом упреждения тоже перемещается, но не параллельно самой себе, а с некоторым изменением наклона. Причем это изменение наклона будет тем меньше, чем больше угол упреждения. Заметим также, что с увеличением угла упреждения траектория снаряда будет все более спрямляться. А может ли траектория стать прямолинейной? Да, если взять a = arctg (VЦ /VC ). Траектория снаряда при наведении с таким углом упреждения совпадает с траекторией снаряда для метода параллельного сближения. Угол упреждения больше этого значения брать нельзя, так как снаряд попадет в упреждающую точку раньше, чем туда прилетит цель.
Чтобы реализовать наведение с упреждением в системах самонаведения, нужно координатор цели делать подвижным относительно корпуса снаряда. Такой координатор все время следит за целью независимо от ориентации оси снаряда. Кроме того, усложняется и сам координатор, так как он должен определять не только угловые координаты цели, но и дальность и их производные.
Первые управляемые снаряды снабжались, как правило, одной из рассмотренных выше систем управления. Современное управляемое оружие должно обладать большой дальностью действия и высокой, близкой к единице, вероятностью поражения цели. Поэтому используется несколько систем управления, которые включаются последовательно. Сначала с помощью систем автономного управления или телеуправления управляемый объект выводится в район цели, и обеспечивается захват цели системой самонаведения. Затем система самонаведения подводит управляемый объект к цели на расстояние, достаточное для ее поражения.
4. Радиовзрыватель
При самом тщательном выполнении систем управления снарядами трудно рассчитывать на стопроцентную вероятность их прямого попадания в цели, особенно воздушные, обладающие, как правило, большой маневренностью и скоростью полета. В то же время нельзя допустить, чтобы дорогостоящий управляемый снаряд прошел мимо цели, не поразив ее, и был потерян. Поэтому все снаряды обеспечиваются неконтактными взрывателями, срабатывающими при приближении снаряда к цели.
Первыми начали работать над созданием радиовзрывателей для снарядов в США еще за 10 лет до Второй мировой войны. Радиовзрыватель, выдерживающий ускорение до 2000g был разработан в США перед Второй мировой войной. Он содержал миниатюрный передатчик, который излучал хорошо направленный пучок ВЧ энергии на цель и детонировал при получении сильного отражения от цели. Такие взрыватели использовались в артиллерийских снарядах, минах, ракетах и бомбах.
В отличие от аппаратуры теле- или самонаведения неконтактные взрыватели не вырабатывают команд управления рулями, а только дают команду на подрыв боевого заряда в зависимости от степени приближения снаряда к цели
Действие неконтактных взрывателей так же, как и аппаратуры самонаведения, основано на использовании электромагнитных и других полей (акустического, теплового и др.). Ввиду небольших расстояний, на которых действуют взрыватели, возможно применение для них и статических полей: электрического и магнитного.
Рассмотрим сначала принципы, на которых может быть построен неконтактный взрыватель. Для выработки команды на подрыв цели может быть использована информация о расстоянии от снаряда до цели, скорости сближения цели и снаряда Vсбл и интенсивности поля, формируемого целью (собственного или отраженного).
 |
||||||
|
||||||
 |
||||||
Из приведенного выше рисунка видно, что при движении снаряда относительно цели расстояние от снаряда до цели будет сначала уменьшаться, а затем после достижения минимального значения увеличиваться.
Радиовзрыватели, использующие информацию о дальности, называются дальномерными. Дальномерные радиовзрыватели срабатывают или по минимуму измеренной дальности, или при достижении определенного значения дальности, когда вероятность уничтожения цели близка к единице. В Германии во время второй моровой войны был разработан такой радиовзрыватель “Марабу”, в котором использовался частотный метод дальнометрии, то есть излучался частотно-модулированный сигнал.
Рассмотрим теперь, как изменяется скорость сближения снаряда с целью при движении снаряда мимо цели.
 |
|
 |
Скорость сближенияVсбл представляет собой проекцию вектора скорости снаряда Vснар на линию “снаряд – цель”. При приближении снаряда к цели скорость сближения будет уменьшаться до нуля при максимальном сближении, затем становится отрицательной (снаряд удаляется от цели) и увеличивающейся по модулю. Частота Доплера зависит только от величины скорости, поэтому она уменьшается до нуля при приближении к цели и возрастает при удалении от нее.
Информация о скорости используется в радиовзрывателях, использующих эффект Доплера. Передатчик, расположенный на снаряде, излучает непрерывный сигнал. Отраженный от цели сигнал отличается по частоте от излученного на величину доплеровского сдвига частоты. В приемнике выделяются колебания доплеровской частоты. Радиовзрыватель срабатывает по нулю доплеровской частоты. Подобными радиовзрывателями в годы второй мировой войны оборудовались зенитные и авиационные снаряды (например радиовзрыватель “Какаду”, разработанный в Германии).
В основу срабатывания радиовзрывателя может быть положена и энергия поля, излучаемого целью.
 |
||||
 |
||||
|
||||
Независимо от физической природы поля (электромагнитного, теплового, акустического) максимальному сближению снаряда и цели соответствует максимум энергии этого поля.
Радиовзрыватели, срабатывающие по максимуму излучаемой целью энергии, должны иметь специфическую диаграмму направленности в виде диска, перпендикулярного к оси снаряда. В Германии во время войны был разработан радиовзрыватель “Трихтэр”, срабатывавший по максимуму отраженного от цели радиосигнала.
Надо отдать должное немецким разработчикам за широту подхода к построению радиовзрывателей. Использовались: электрический заряд цели (самолета); изменение емкости (проводник в электрическом поле); изменение индуктивности (железо в магнитном поле); отражение модулированного света; изменение интенсивности звука от двигателей самолета. Многое из того, что было заложено ими, использовалось в поздних разработках во многих странах мира.
Заключение
Радиоуправление применяется при построении систем автоматики, в авиа- и ракетостроении, робототехнике. В современное время получило развитие направление управления бытовой техникой и приборами ("умный дом").
Список литературы
1. Коновалов Г.Ф. Радиоавтоматика.
2. Основы радиоуправления, под ред. В.А. Вейцеля, В.Н. Типугина.-М.: Сов. радио, 1973.
3. Мановцев А.П., Основы теории радиотелеметрии, М., 1973.
Размещено на http://www.