| Похожие рефераты | Скачать .docx |
Реферат: Одночастотные радиолокационные станции
Введение
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно-техническое направление в радиотехнике зародилась в 30-х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС) или радиолокаторами; а наблюдаемые объекты — радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения и т. п.
В радиолокации наиболее часто измеряются дальность между целью и РЛС, угловые координаты (азимут, угол места) и радиальная, относительно радиолокатора, составляющая скорости движения. (Азимут - это угол между направлением на цель и северным направлением, измеренный в горизонтальной плоскости. Угол места измеряется между вектором наклонной дальности и его проекцией на горизонтальную плоскость.) В задачу радиолокационного наблюдения в некоторых случаях входит также идентификация (распознавание) целей.
Системы радиолокации практически всегда входит в состав более сложных суперсистем. Эти суперсистемы имеют важное военное и народнохозяйственное значение и находят разнообразное применение: для управления воздушным движением, в навигации самолетов, кораблей, в геофизических и астрофизических исследованиях и др.
Системы радиолокации составляют информационную часть таких суперсистем и функционируют совместно и во взаимной связи с другими подсистемами суперсистемы (радионавигации, радиоуправления, передачи информации).
1. Разведка радиоэлектронных средств
Радиоразведка возникла во время первой мировой войны как разведка средств радиосвязи, а затем распространилась на радиолокацию, радиоуправление и другую радиоэлектронную технику, излучающую электромагнитные волны. Разведывательная аппаратура должна определять направление на источник радиоизлучения и параметры радиосигнала: несущую частоту и параметры модулирующего сигнала. В состав разведывательной аппаратуры обязательно входят: приемник, анализатор сигналов и устройство индикации. В дальнейшем будем называть эту аппаратуру разведывательным приемником.
Современные радиоэлектронные устройства работают в широком диапазоне волн: от длинных радиоволн до инфракрасного излучения. Невозможно разработать компактную аппаратуру, позволяющую проводить радиоразведку во всем диапазоне волн, используемых радиоэлектронными средствами. Поэтому разведывательный приемник разрабатывается для определенного диапазона радиоволн. Например, разведывательные приемники, применявшиеся во время второй мировой войны в авиации США, работали в следующих диапазонах радиоволн:
AN/ARQ-8 в диапазоне от 25 до 100 МГц,
AN/APR-4 в диапазоне от 40 до 3000 МГц,
AN/APR-5 в диапазоне от 1000 до 3100 МГц,
AN/APR-8 в диапазоне от 300 до 6000 МГц.
Что такое частота сигнала ?
Для передачи любого радиосигнала требуется некоторая область частот. Например, для передачи синусоидального сигнала бесконечной длительности, имеющего частоту f 0 , требуется бесконечно малая полоса частот вблизи частоты f 0 . Если синусоидальный сигнал, частота которого равна f 0 , имеет конечную длительность t, то он занимает конечную полосу частот. Эта полоса примерно равна 1/t. Полосу частот, занимаемых сигналом, называют шириной спектра Df , а центральную частоту спектра несущей частотойf 0 . Этими терминами мы дальше и будем пользоваться.
Применяемый в радиолокации импульсный радиосигнал имеет малую длительность. В РЛС метрового диапазона длительность импульса составляет несколько микросекунд, а в станциях сантиметрового диапазона – десятые доли микросекунды. Примем длительность импульса t = 0,1 мкс, тогда ширина спектра Df = 1/t = 1/(0,1*10-6 ) = 10 МГц. Сравнив эту величину с диапазоном частот разведывательных приемников, приведенных для примера выше, отметим главную особенность разведывательных приемников: диапазон частот, в котором нужно найти сигнал, на несколько порядков превышает ширину спектра сигнала.
Как можно произвести поиск сигнала?
На рисунке ниже показан спектр радиосигнала (f 0 – центральная частота, равная частоте синусоидальной несущей; Df – ширина спектра).
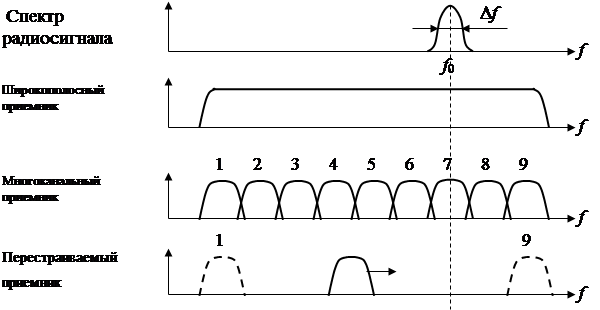 |
Если взять полосу пропускания приемника равной диапазону частот, в котором производится разведка (на рисунке – Широкополосный приемник), то сигнал в принципе обнаружить можно (если не учитывать что сигнал может потеряться в шумах приемника, так их мощность тем больше, чем шире полоса пропускания приемника), но измерить его параметры, например, центральную частоту, нельзя.
Для измерения частоты необходим приемник, полоса пропускания которого соизмерима с шириной спектра радиосигнала. В этом случае возможны два варианта построения разведывательного приемника.
Первый вариант – многоканальный приемник. Он состоит из N идентичных приемников (каналов) с узкой полосой пропускания, настроенных каждый на свою частоту и перекрывающих весь разведываемый диапазон. На рисунке выше для примера показаны частотные характеристики каждого из каналов 9-иканального приемника. Центральная частота сигнала определяется по номеру канала, на выходе которого появляется сигнал. Достоинство такого варианта построения разведывательного приемника – минимальное время обнаружения радиосигнала и определения его частоты. Недостаток – громоздкость устройства, так как реально число каналов должно быть порядка сотен или тысяч.
Второй вариант – перестраиваемый приемник. В данном случае используется один приемник с узкой полосой пропускания, настройка которого периодически изменяется, и его частотная характеристика плавно перемещается от одной границы диапазона до другой (На рисунке – от положения 1 до положения 9). Частота сигнала определяется по моменту времени, когда напряжение на выходе приемника будет максимальным. Схема поискового разведывательного приемника проста, но время обнаружения сигнала велико.
Но из-за простоты в большинстве случаев отдается предпочтение именно этому варианту.
Как строится разведывательный приемник?
Основная задача, которую приходится решать при построении аппаратуры разведки, – это обеспечение быстрого обнаружения сигнала и измерения его параметров (главным образом, центральной частоты и, возможно, ширины спектра). Ее решение связано с наиболее целесообразным разделением всего диапазона частот на отдельные поддиапазоны. Рассмотрим кратко, с какими трудностями приходится встречаться при решении этой задачи, ограничившись только радиолокационной разведкой.
С учетом конкретных условий применения разведывательной аппаратуры общий диапазон волн разведки может быть сокращен по тактическим соображениям – в зависимости от того, для разведки каких источников радиоизлучений предназначена аппаратура. Например, если аппаратура предназначена для разведки самолетных РЛС, то диапазон частот можно ограничить миллиметровыми и сантиметровыми волнами, так как на более длинных волнах потребуются антенны больших размеров, что на борту самолета позволить нельзя. Если аппаратура предназначена для обнаружения работы станций дальнего обнаружения, очевидно, можно ограничиться дециметровыми и метровыми волнами, на которых обычно работают эти станции.
После выбора диапазона его приходится делить на поддиапазоны. При этом стремятся получить наименьшее число поддиапазонов с целью сокращения объема аппаратуры. Обычно стараются сделать так, чтобы участки диапазонов, в которых работают наиболее широко применяемые радиолокационные станции противника, не попадали на границы поддиапазонов.
С уменьшением числа поддиапазонов каждый из них расширяется. Чем шире поддиапазон, тем, естественно, больше время перестройки (для перестраиваемых приемников). Поэтому при разработке разведывательной аппаратуры приходится выбирать, исходя из ее тактического применения, наиболее приемлемые компромиссные решения.
2. Одночастотные когерентно - импульсные РЛС
При когерентных методах непрерывного излучения в качестве опорного сигнала можно использовать сигнал генератора высокой частоты. В когерентно - импульсном методе такой возможности нет, ибо генератор радиочастоты работает в импульсном режиме. Таким образом, в паузе между зондирующими импульсами необходим дополнительный источник опорного сигнала. Для этого обычно применяется когерентный генератор или гетеродин, работающий в режиме фазовой синхронизации с генератором радиочастоты.
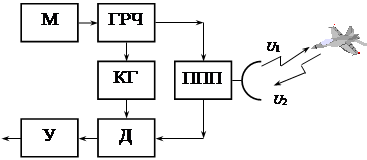 Структурная схема когерентно-импульсной РЛС показана на рис. 1. На выходе детектора (Д) образуются биения отраженного и опорного сигналов когерентного гетеродина (КГ). Однако сигнал U
2
имеет импульсный характер, поэтому даже при непрерывном опорном сигнале когерентного гетеродина биения возникают лишь во время существования отраженного сигнала.
Структурная схема когерентно-импульсной РЛС показана на рис. 1. На выходе детектора (Д) образуются биения отраженного и опорного сигналов когерентного гетеродина (КГ). Однако сигнал U
2
имеет импульсный характер, поэтому даже при непрерывном опорном сигнале когерентного гетеродина биения возникают лишь во время существования отраженного сигнала.
Рис. 1. Структурная схема когерентно-импульсной РЛС
Рассматривая только выходное напряжение детектора, которое после фильтрации является чисто импульсным, можно получить следующие зависимости [1] для сигналов движущейся и неподвижной целей:
 (1.1)
(1.1)
(1.2)
![]() где
где
сигнал неподвижной цели; U m дц - амплитуда сигнала движущейся цели; М = U m дц / U m 2 нц - коэффициент модуляции сигнала биений.
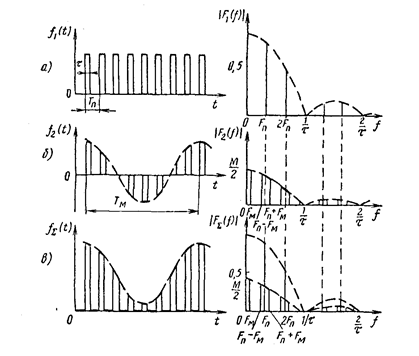 Формулы (1.1) и (1.2) дают последовательности модулированных по амплитуде видеоимпульсов, спектральный состав которых показан на рис. 2.
Формулы (1.1) и (1.2) дают последовательности модулированных по амплитуде видеоимпульсов, спектральный состав которых показан на рис. 2.
Рис. 2. Спектральный состав видеоимпульсов на выходе детектора
Сравнивая импульсы движущихся и неподвижных целей, можно сделать заключение, что основным отличием временных функций, соответствующих этим последовательностям, будет наличие переменной составляющей в сигнале движущейся цели. Переходя к спектральным представлениям, можно утверждать, что спектр немодулированных видеоимпульсов, соответствующих функции времени f 1 (t ), будет состоять лишь из гармоник частоты повторения (рис. 2, а ). Спектр знакопеременной последовательности модулированных видеоимпульсов, соответствующих функции времени f 2 (t ), будет состоять из гармоник nF п ± F м (рис. 2 б ). Наконец, спектр последовательности видеоимпульсов, соответствующих функции времени f S (t )=f 1 (t )+f 2 (t ), будет состоять из гармоник nF п и nF п ± F м (рис. 2 в ).
Следовательно, для селекции движущихся целей необходимо компенсировать на выходе элемента сравнения импульсные последовательности с постоянной амплитудой или подавлять в спектре сигнала после элемента сравнения все гармоники частоты повторения nF п .
Однако при построении устройств селекции движущихся целей в когерентно-импульсных РЛС следует учитывать наличие так называемого стробоскопического эффекта.
Запишем выражение (1.2) с учетом фильтрации постоянной составляющей:
Очевидно, что это выражение будет однозначной функцией п только в пределах однозначности функции косинуса его аргумента. Поэтому можно считать, что для однозначной связи U m б и n необходимо, чтобы
Это соотношение должно выполняться для любого п . Поэтому, полагая п = 2, получаем пределы однозначного соответствия частоты биений импульсной последовательности частоте Доплера
При увеличении f д > F п /2 за счет периодичности косинуса получаем периодическое повторение указанного соответствия.
На рис. 3 показана зависимость частоты биений от частоты Доплера. Видно, что в случае, когда частота Доплера кратна частоте повторения, последовательность импульсов оказывается немодулированной, так как f б =0.
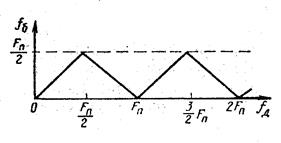
Рис. 3. Зависимость частоты биений от частоты Доплера
С учетом этого и выражение для значения частоты Доплера получаем
Таким образом, модуляция импульсов движущейся цели отсутствует, а следовательно, сигналы движущейся и неподвижной целей при радиальных скоростях, удовлетворяющих условию (1.3), не различаются. Эти скорости называются «слепыми». Цель, двигающаяся с одной из «слепых» скоростей, за период повторения приближается или удаляется от радиолокатора на расстояние, кратное целому числу половины длины волны несущего колебания радиолокатора. При этом разность фаз прямого и отраженного сигналов за период повторения будет изменяться на величину, кратную 2p.
Способ построения когерентно-импульсных систем селекции выбирается в зависимости от соотношения параметров импульсной модуляции. Обычно различают когерентно-импульсные РЛС, работающие в режимах малой и высокой скважности. Естественно, граница разделения весьма условна и соответствует значению скважности Q = 10. При Q < 10 имеем режим малой скважности, а при Q > 10 - большой скважности [1].
Основным преимуществом когерентно-импульсной РЛС, работающей в режиме высокой скважности, является высокая разрешающая способность по дальности.
Различают истинно когерентные и псевдокогерентные РЛС, которые часто называют также когерентными РЛС селекции движущихся целей. Различие этих систем заключается в способе построения передающего
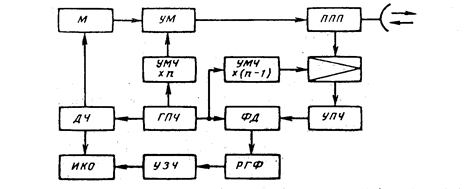
Рис. 4. Структурная схемы истинно когерентной РЛС высокой скважности
устройства и способе получения опорного когерентного напряжения, что приводит к различному интервалу когерентности сигналов РЛС.
На рис. 4 приведен пример схемы истинно когерентной РЛС высокой скважности. Передатчик построен по многокаскадному принципу. Стабильные колебания задающего генератора промежуточной частоты (ГПЧ) умножаются по частоте и усиливаются в усилителе мощности (УМ). Одновременно в этом же каскаде происходит импульсная модуляция сигнала с высокой скважностью и частотой повторения, зависящей от модулятора (М). С помощью второго умножителя частоты (УМЧ), на который подаются колебания задающего генератора промежуточной частоты, формируется гетеродинный сигнал, используемый для преобразования частоты принимаемых сигналов в смесителе приемника. Усиленные в УПЧ сигналы сравниваются с опорным колебанием генератора промежуточной частоты на фазовом детекторе (ФД).
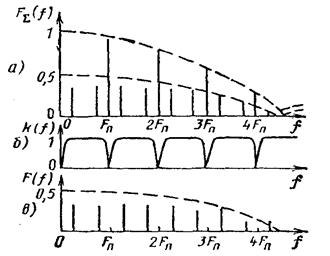
Рис. 5. Спектры сигналов на входе, выходе РГФ и его АЧХ
Сигнал биений в видемодулированной или немодулированной последовательности видеоимпульса подается на режекторный гребенчатый фильтр (РГФ), который селектирует сигналы движущихся целей и подавляет все составляющие частоты повторения. После усиления сигналы движущихся целей подаются на индикатор кругового обзора (ИКО), где и происходит их обнаружение. На рис. 5 показаны спектры сигналов на входе и выходе РГФ, а также амплитудно-частотная характеристика этого фильтра.
На рис. 6 приведен пример схемы псевдокогерентной РЛС, работающей в режиме высокой скважности. При таком построении используются однокаскадные передатчики. Генератор радиочастоты (ГРЧ) работает в режиме самовозбуждения при модуляции импульсами высокой скважности. Опорный когерентный сигнал формируется КГ, который синхронизируется по фазе импульсами генератора радиочастоты, предварительно преобразованными на промежуточную частоту, так как когерентный гетеродин работает на промежуточной частоте. Принятые сигналы сравниваются с опорным также на промежуточной частоте в фазовом детекторе (ФД).
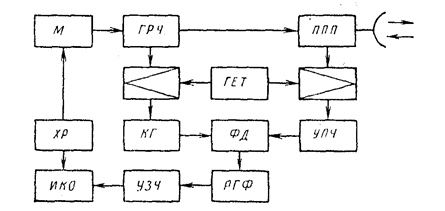
Рис. 6. Схема псевдокогерентной РЛС высокой скважности
импульс детектор радиоэлектронный
Особенностью псевдокогерентных РЛС является малый интервал когерентности сигнала, равный одному периоду повторения. Это объясняется тем, что колебания генератора радиочастоты имеют случайную начальную фазу от импульса к импульсу или от периода к периоду повторения Следовательно, спектр таких импульсов является сплошным. Поэтому фазовая синхронизация осуществляется импульсом ГРЧ в начале каждого периода повторения и когерентность колебаний ГРЧ и опорного сигнала КГ сохраняется лишь на этот период повторения. То же повторяется и в каждом следующем периоде. В двух соседних периодах или в двух любых периодах повторения когерентность колебаний отсутствует, поэтому РЛС и называется псевдокогерентной.
Заключение
Радиолокация представляет собой средство расширения возможностей человека определять наличие и положение объектов за счет использования явлений отражения радиоволн этими объектами. Ее ближайшим конкурентом при выполнении этих функций является оптическая техника, включающая телескопы, которые обладают высокой точностью и обычно имеют фотографические регистрирующие устройства. Преимущество радиолокационных средств по сравнению с оптическими состоит в том, что радиолокационные устройства могут работать в темноте и сквозь облака, обладают большой дальностью действия и позволяют определять дальность до объекта со значительно большей точностью, нежели оптические устройства. Хотя световые волны также являются электромагнитными, но в радиолокации частота их намного ниже. Это позволяет применять радиотехнические методы и схемы.
Развитие радиолокации явилось важной частью технической революции двадцатого века. Военная техника, использующая принципы радиолокации, впервые была создана перед самым началом второй мировой войны; с этого времени наблюдается быстрый и непрерывный прогресс в указанной области.
Список литературы
1) Перминов И.Г. «Физические основы получения информации». 2006 год.
2) Артамонов В.М. «Электроавтоматика судовых и самолетных радиолокационных станций». 1962 год.
3) Современная радиолокация. Анализ, расчет и проектирование. Под редакцией Кобзарева Ю.В., М., Сов.радио, 1969г.-704стр.
4) Дулевич В.Е. Теоретические основы радиолокации. М., Сов.радио, 1978г. – 608стр.
5) Ширман Я.Д. Теоретические основы радиолокации. М., Сов.радио, 1970г. – 560стр.
Похожие рефераты:
Радиолокационные системы и средства помехозащиты
Средства постановки помех и помехозащиты
Беспроводные телекоммуникационные системы
Приемник цифровой системы передачи информации ВЧ-каналом связи по ВЛ
Наземный радиолокационный запросчик IЛ24
Линейное оборудование синхронной цифровой иерархии SL16
Применение на судовых станциях автоматических идентификационных систем
Модель тракта прослушивания гидроакустических сигналов