| Скачать .docx |
Курсовая работа: Средства постановки помех и помехозащиты на РЛС
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
РЯЗАНСКИЙ ГОСУДАРСТВЕННЫЙ РАДИОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА РАДИОТЕХНИЧЕСКИХ СИСТЕМ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по дисциплине:
«Теоретические основы радиоэлектронной борьбы»
на тему:
«СРЕДСТВА ПОСТАНОВКИ ПОМЕХ И ПОМЕХОЗАЩИТЫ»
Студент Белокуров Евгений Викторович
Рязань 2007 г.
Содержание
Введение
1. Анализ задачи и её формализация
2. Расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех)
3. Расчет зон прикрытия помехами (пассивными и активными)
4. Расчет параметров средств помехозащиты (алгоритма помехозащиты, структуры и параметров)
5. Анализ эффективности применения комплекса помех и средств помехозащиты
6. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
7. Выбор и технико-экономическое обоснование технологической базы для реализации проекта
8. Составление структурной схемы устройства и описание её работы
Заключение
Список использованных источников
Графические материалы
Введение
Радиолокационные станции (РЛС) управления воздушным движением (УВД) используются для управления движением самолетов в воздухе в районе аэродрома и на земле после посадки. Такие станции позволяют обнаруживать прибывающие самолеты, осуществлять их индивидуальное опознавание, направлять самолеты в зоны ожидания и контролировать движение в этих зонах, последовательно выводить самолеты на посадочный курс и наблюдать за выполнением посадки, следить за передвижением самолетов и автотранспорта по летному полю.
Основные тактические требования к РЛС формулируются с учетом специфики движения самолетов в районе аэродрома. Считается, что дальность действия РЛС наблюдения за воздушной обстановкой в районе аэродрома должна быть 200—250 км. Такая дальность обеспечивает возможность получения необходимой информации об обнаруженном самолете за время его приближения к аэродрому. Одновременно подобная дальность позволяет организовать зону ожидания достаточно большого числа самолетов.
Данная курсовая работа поможет подробнее рассмотреть возможности РЛС в мирное время, что последнее время становится всё актуальнее, при участившихся случаях террористических актов.
1. Анализ задачи и её формализация
В данной курсовой работе предлагается произвести эскизный расчёт РЛС, в соответствии с параметрами этой радиолокационной станции разработать алгоритмы работы и структурные схемы постановщика помех и устройств защиты для этой РЛС.
В соответствии с ТЗ, дальнейшие рассуждения проводятся для трехкоординатной РЛС управления воздушного движения. Дальность обнаружения цели выбирается не менее 230 км (Rmax = 300 км). ЭПР цели (E= 6.4 м2 ). Предлагаемый ТЗ тип помех: пассивная, активная шумовая.
Первый тип помех относится к естественным помехам и возникает из-за наличия у антенной системы РЛС боковых лепестков в угломестной плоскости. Главный луч при этом непосредственно земли не касается, так как для РЛС управления воздушного движения(УВД) характерна слегка приподнятая ДН. Также к данному виду помехи относятся так называемые «местные предметы», которые возникают из-за больших углов закрытия на местности вокруг точки стояния РЛС, при этом помеха приходит и по главному лучу. Для данной помехи характерно нулевое доплеровское смещение частоты, следовательно, для борьбы с ней лучше всего использовать режекторный фильтр.
Борьба с пассивными помехами требует, прежде всего, ослабления мощности мешающих отражений, принимаемых антенной радиолокатора, и сужения динамического диапазона помех для предупреждения перегрузки приёмного тракта, что наиболее часто встречается в системах УВД.
Второй тип помех относится к преднамеренным. Активная помеха представляет собой электромагнитные колебания, которые создаются каким-либо источником в диапазоне частот РЛС. Шумовые помехи – помехи основанные на использовании шума. Возможны два вида таких помех. При модуляции шумом несущего колебания по какому-либо параметру формируются АМ - или ЧМ - шумовые помехи или их комбинация. Шумовые помехи маскируют или подавляют полезные сигналы, а также изменяют уровень ложных тревог в радиолокационных приёмниках. Они обычно являются заградительными. При непосредственном излучении шума генерируется прямошумовая помеха, которая в зависимости от ширины спектра может быть как прицельной, так и заградительной.
Эскизный расчёт РЛС.
Для РЛС дальнего обнаружения характерен импульсный режим работы. Рассчитаем период повторения зондирующих импульсов исходя из заданной однозначно измеряемой дальности Rmax = 300 км:
![]()
Для данного вида радиолокационных станций характерен метровый диапазон рабочих частот от 1 до 10 метров. В соответствии с атмосферными окнами прозрачности и допустимыми размерами раскрыва антенной системы приемлема несущая частота ![]() . Реализуемая ширина ДН в азимутальной плоскости на этих частотах составляет от 2.5 до 4 градусов. Достаточная ширина ДН
. Реализуемая ширина ДН в азимутальной плоскости на этих частотах составляет от 2.5 до 4 градусов. Достаточная ширина ДН ![]() . Рассчитаем раскрыв антенны необходимый для формирования заданной ширины ДН:
. Рассчитаем раскрыв антенны необходимый для формирования заданной ширины ДН:
![]() ,
,
где ![]() - коэффициент, учитывающий величину амплитудных искажений.
- коэффициент, учитывающий величину амплитудных искажений.
Для определения радиолокационной станцией угла места необходимо обеспечить качание луча в угломестной плоскости (последовательный режим обзора). Зададимся такой же шириной ДН что и в азимутальной плоскости, соответственно таким же будет и эквивалентный раскрыв антенны в этой плоскости. Конструктивно антенную систему можно выполнить в виде двух ФАР, одна из которых, синфазная, будет обеспечивать узкую ДН в азимутальной плоскости, а другая, наклонного излучения, качание луча в угломестной плоскости. Вся же АС будет вращаться в азимутальной плоскости, обеспечивая последовательный обзор в секторе от 0 до 360 градусов. Скорость вращения антенны выберем стандартной для данного типа РЛС: ![]()
Рассчитаем коэффициент усиления АС:
![]()
Круговая частота вращения антенны:
![]()
Ширина ДН в радианах:
![]()
Рассчитаем длительность пачки отражённого от цели сигнала, т.е. время в течении которого цель находиться в главном луче ДН АС:
![]()
Количество импульсов в пачке:
![]()
Зададимся разрешением по дальности ![]() и рассчитаем длительность импульса зондирующего сигнала:
и рассчитаем длительность импульса зондирующего сигнала:
![]()
Эффективная ширина спектра сигнала:
![]()
Рассчитаем пороговое отношение сигнал/шум:

Рассчитаем мощность шума:
![]() ,
,
где ![]() - постоянная Больцмана, Кш
-коэффициент шума приёмного устройства. Минимальная мощность сигнала необходимая для его обнаружения:
- постоянная Больцмана, Кш
-коэффициент шума приёмного устройства. Минимальная мощность сигнала необходимая для его обнаружения:
![]() .
.
Рассчитаем среднюю мощность РЛС, исходя из обеспечения необходимой энергетической дальности, применив основное уравнение радиолокации:

Импульсная мощность РЛС:
![]() , где Q-скважность зондирующего сигнала:
, где Q-скважность зондирующего сигнала:
![]()
Полученные энергетические характеристики излучения соответствуют реально допустимым и реализуемым на практике.
2. Расчёт параметров помехопостановщика (мощность передатчика
помех, средств создания помех, параметров помех)
Опираясь на полученные выше основные характеристики РЛС, можно перейти к расчету параметров помехопостановщика. Общая задача постановки активных помех – сокрытие объектов или факта передачи радиосигнала в некоторой прикрываемой области пространства. В нашем случае, так как это не оговорено, может предполагаться действие активных помех любых видов.
В общем случае цель и постановщик активных помех могут находиться как в одной точке (самоприкрытие объекта), так и в различных точках пространства. В ситуации самоприкрытия эффективность помехи тем выше, чем больше расстояние от радиолокатора до цели и падает по мере сближения с РЛС.
радиолокационный помехопостановщик защита

Рис.1
При удалении цели на расстояние больше чем Rцmin отношение с/ап уменьшается и не достаточно для обнаружения цели. При приближении цели меньше чем на Rцmin от РЛС, с/ап возрастает что создает условия для обнаружения цели. Важным фактором здесь является соотношение мощности передатчика РЛС и постановщика АП.
Дальность местонахождения постановщика активных помех должна выбираться из условия превышения на 20-50% дальности максимального обнаружения РЛС . В то время как мощность передатчика активных помех должна составлять не больше 1-10% от мощности передатчика РЛС.
Расстояние постановщика АП до РЛС примем Rпап = 500 км; мощность передатчика активных помех P = 20кВт. Учитывая свойства антенн метровых волн, большой коэффициент усиления постановщика получить нельзя, следовательно зададимся значением Gпап = 10. Необходимо также учесть, что постановщик может работать как по главному лучу, так и по боковым лепесткам ДН АС (рис 1).
В качестве пассивных помех могут применяться полуволновые вибраторы или диполи разбрасываемые в атмосфере, а так же широкодиапазонные металлизированные ленты, создающие отражение в более широком спектре частот.
Для расчета действия пассивной помехи зададимся КНД АС в направлении боковых лепестков GПП
=G·K= 60.82; Пассивную помеху будем ставить на расстоянии 250 км. Отношение ш/п должно быть примерно -60дб, следовательно ![]() , найдём необходимую площадь создания помехи:
, найдём необходимую площадь создания помехи:
![]()
![]()
Определим количество диполей в пачке. Для 1 диполя
Sд.мах =0.17. λ2 =0.17. 1.52 =0,38
Общее количество диполей: N=Sпп /Sд.мах =245.1/0.38=645 штук.
3. Расчёт зон прикрытия помехами (пассивными и активными)
Передатчик помех несёт на себе воздушное судно, это может быть самолет ДРЛО, самолет радиолокационной разведки и т.д.
Рассчитаем зоны прикрытия от расстояния от РЛС до постановщика активных помех. При этом стоит учитывать ,как было сказано ранее, что помеха может приходить как по боковым лепесткам , так и по главному лучу ДН РЛС.
Допустим что ПАП находиться на расстоянии 500 км, с заданной мощностью=20кВт(что было рассчитано ранее). Из графика хорошо видно, что при действии активной помехи по боковым лепесткам ДН антенны РЛС, она будет уменьшать дальность действия РЛС.
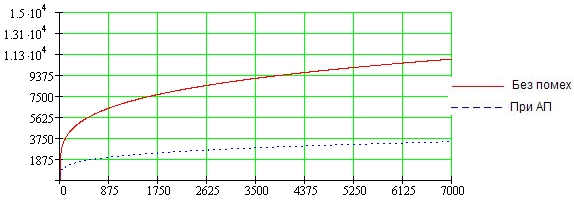
Рис. 2 График зависимости дальности действия РЛС от расстояния РЛС-ПАП, при действии ПАП по боковым лепесткам ДН РЛС.
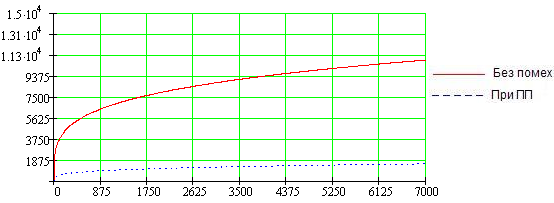
Рис. 3 График зависимости дальности действия РЛС от расстояния РЛС-ПП, при действии ПП по боковым лепесткам ДН РЛС
По графикам видно, что применение АШП значительно снижает дальность обнаружения РЛС.
4. Расчёт параметров средств помехозащиты (алгоритма
помехозащиты, структуры и параметров)
Активные помехи, принятые антеннами РЛС, смешиваются на входе приемника с полезным сигналом и шумом, образуя входную реализацию. Основные особенности взаимодействий АП и полезных сигналов – полное или частичное их совпадение во времени, перекрытие по частоте и различие в направлении прихода радиоволн. При совместной обработке полезных сигналов и помех необходимо учитывать, что и сигнал и помеха являются одновременно функцией времени, частоты, начальных фаз и амплитуд, а также направлений прихода сигналов и параметров поляризации волны, т. е. являются пространственно-временными сигналами. Обычно алгоритм обработки сигналов активных помех разделяют на пространственный и временной алгоритмы. Сначала производится обработка сигнала в пространстве с помощью пространственного фильтра, осуществляемого соответствующим построением антенной системы, затем сигнал подвергается обработке во временной области.
Оптимальная пространственная обработка сводится к умножению на комплексный коэффициент передачи сигнала с каждого элемента раскрыва антенны. Для этого необходимо раздельно управлять амплитудой и фазой сигнала в каждой точке раскрыва антенны, чего можно достичь только в ФАР. Положительными свойствами ФАР являются возможность электрического сканирования луча, возможность формирования нескольких лучей, быстрое перемещение луча ДН, но использование ФАР требует существенного усложнения антенной системы за счет введения дополнительных элементов. Одним из наиболее эффективных алгоритмов пространственного подавления помех является использовании адаптивных ФАР (в канале обработке каждого элемента ФАР необходим весовой усилитель или аттенюатор и фазовращатель для настройки на заданное направление приема сигнала). В качестве устройства помехозащиты выберем устройство подавления с деформацией ДН антенны которое в свою очередь позволяет сформировать минимум диаграммы направленности в направлении на источник помех и требует дополнительной антенны (рис. 4).

Рис. 4- Структурная схема устройства формирования провала ДН антенны.
f0 (Q), f1 (Q)- исходные ДН основной и компенсационной антенн.
fΣ (Q)= f0 (Q)+Wf1 (Q)- результирующая ДН антенной системы.
Если Q1 – угол прихода помехи, то для компенсации необходимо выполнение условия fΣ (Q1 )=0, откуда
W= - f0 (Q1 ) /f1 (Q1 ).
Подставив W в выражение для fΣ (Q), получим
fΣ (Q)= f0 (Q)-[f0 (Q1 ) /f1 (Q1 )]f1 (Q) [1, стр. 200].
Таким образом, в направлении на источник помехи образуется провал в ДНА. При действии нескольких помех с ряда направлений необходимо применение большого количества компенсирующих антенн, чтобы антенна А0 и одна из других антенн Аi образовали компенсирующее устройство активной помехи с i-ого направления. Структурная схема устройства пространственной обработки для подавления нескольких пространственных помех приведена на рисунке 5.

Рис. 5 Схема пространственной обработки для подавления нескольких (N) помех.
В качестве временного алгоритма применяем устройство компенсации помех с корреляционными обратными связями. Основная антенна принимает помеху, в то время как дополнительная (компенсационная) антенна принимает помеху от того же источника, но отличающуюся по фазе. Используя сигналы этих каналов, можно сформировать компенсатор с корреляционными обратными связями, в котором будет компенсироваться помеха. Такое устройство обеспечивает минимум среднего квадрата напряжения (мощности) помехи на выходе фильтра (рис. 6).
Для подавления пассивных помех, действующих на нашу РЛС ( в роли которых могут выступать дипольные отражатели) будем применять режекторный фильтр, а именно линейный режекторный фильтр с симметричными весовыми коэффициентами, который реализуем при помощи пакета “Стрела 2.0”.
Режекторный фильтр должен подавлять помеху до уровня шумов, следовательно коэффициент подавления помехи должен составлять около -60 дБ.

Рис. 6 Структурная схема компенсатора активной помехи с корреляционными обратными связями.
На рис 7 представлено диалоговое окно программы в котором зададим вид фильтра – СС (КИХ) фильтр-ЧПК, относительную частоту среза 0,1. Порядок фильтра задаем из соображения, чтобы число импульсов в пачке было не меньше чем порядок фильтра +1. Отношение с/(ш+п):
![]()
![]() -58.39 дБ
-58.39 дБ
На рис 7 представлено диалоговое окно программы в котором задаем относительную ширину спектра сигнала равной 0,2; вид помехи – с гауссовской формой спектра, относительную ширину спектра флуктуации помехи, как было указано выше, равной 0,1; относительную фазу помехи равной 0. Энергетические соотношения будем задавать на основе полученных ранее, а именно:
отношение сигнал/(помеха+шум) = -58,39 дБ;
отношение шум/помеха = -60 дБ;
количество импульсов в пачке равное 42

Рис. 7
Коэффициент подавления помехи получается равным 57,25 дБ, что приемлемо, учитывая последующее накопление. Симметричность же коэффициентов относительно центрального будет гарантировать линейность фазовой частотной характеристики фильтра.
Структурная схема цифрового режекторного фильтра, в упрощенной форме, имеет следующий вид:

Рис. 8
Чтобы упростить аппаратную реализацию устройства сократим количество умножителей основываясь на симметричности коэффициентов фильтра.
Для того чтобы фильтр нормально работал необходимо ,чтобы на его вход поступало не менее N отсчетов, (где N порядок режекторного фильтра). Посредством остальных 11-6=5 отсчетов можно произвести когерентное накопление.
5. Анализ эффективности применения комплекса помех и средств
помехозащиты
Мерой эффективности режекторного фильтра служит достигнутый, коэффициент подавления. В нашем случае он равен 57.25 дБ, т.е. сигнал помехи фильтр подавляет до уровня шумов. Таким образом, помеха практически полностью исключается из дальнейшей обработки.
Также критерием эффективности служит коэффициент улучшения отношения с/п, в спроектированном фильтре он составляет 39.59 дБ, что означает превышение отношения с/п на выходе над с/п на входе на значительную величину.
6. Оценка требований к программно-аппаратным ресурсам средств
конфликтующих сторон
Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств осуществляющих эту обработку.
Цифровые режекторные гребенчатые фильтры (ЦРГФ) подавления помех требуют предварительного преобразования сигналов в цифровую форму с помощью АЦП. В таких устройствах производиться дискретизация по времени, с дискретом ![]() . Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета
. Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета ![]() , где m- число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
, где m- число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
Аналогичные требования предъявляются и к быстродействию АЦП РПрУ устройства постановки помех.
Требования к устройствам ВОИ менее жесткие, так как, например, индикатор кругового обзора (ИКО) должен обновлять информацию через время обзора.
7. Выбор и технико-экономическое обоснование технологической базы
для реализации проекта
Техническая реализация фильтровых устройств возможна на фильтрах с быстрым преобразованием Фурье (БПФ), а также на микропроцессорах DSP. Всё большую роль в цифровой обработке РЛИ начинают играть программируемые логические интегральные микросхемы (ПЛИС), которые обладают гибкой структурой и возможностью смены программы, в отличие, например от микропроцессоров.
Несколько слов об АЦП. В настоящее время быстродействие использующихся образцов характеризуется частотой дискретизации ![]() , например, АЦП AD 6644 фирмы AnalogDevice (США) имеет
, например, АЦП AD 6644 фирмы AnalogDevice (США) имеет ![]() , при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала до 39 МГц.
, при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала до 39 МГц.

Рис. 9
Типовая реализация устройства обнаружителя движущихся целей (ОДЦ) многоканально по дальности (m = 2000 каналов), рис.9. После подавления помех используется оптимальная, междупериодная обработка сигнала на фоне белого шума. Обычно применяют когерентное накопление остатков вычитания. При этом вводится поправка в фазу сигнала для компенсации движения цели.
Каналы дальности реализуются либо с помощью селекторов дальности в УПЧ, либо с помощью коммутации ячеек ОЗУ.
Селекторы дальности (СД) обеспечивают поступление в каждый из m каналов сигналов только с одного элемента разрешения по дальности. С подавлением помех в ЦРГФ информация записывается в ОЗУ, а затем фильтруется на основе n-точечного алгоритма БПФ, пусть даже с неоднозначностью по скорости. Причем n = N-Kф = 42-6 = 36, где N- количество импульсов в пачке, а Кф - порядок режекторного фильтра.
8. Составление структурной схемы устройства и описание её работы.
Структурную схему устройства постановки активных шумовых помех представим в упрощенном виде, так как перед нами не лежит конкретная задача разработки передатчика и антенной системы. Данная схема изображена на рисунке 10:

Рис. 10
Данная схема использует сложение мощностей и работу на одну антенну. ФАР позволяет сконцентрировать всю энергию в узком луче и направить его на подавляемое РЭС. Это наиболее перспективная схема, к достоинствам которой можно отнести простоту изготовления и применения а также дешевизну конструкции если стоит вопрос о большом количестве изготавливаемых передатчиков.
На основе приведенных выше рассуждений и расчетов нам известно что необходимо применять когерентную систему. Ниже приведем один из возможных вариантов построения псевдокогерентного радиолокатора высокой скважности (рис. 11). Такое построение когерентно- импульсных радиолокаторов[5, стр. 169] характерно при использовании однокаскадных передатчиков. Генератор ВЧ работает в режиме самовозбуждения при модуляции импульсами высокой скважности. Опорный когерентный сигнал формируется когерентным гетеродином, который синхронизируется по фазе импульсами генератора высокой частоты, предварительно преобразованными на пч, так как когерентный генератор работает на промежуточной частоте. Принятые сигналы сравниваются с опорным на пч в детекторе. РГФ осуществляет селекцию сигналов движущихся целей. После этого производится вычисление параметров целей, затем селекция ложных целей. После усиления в усилителе сигналы движущихся целей подаются на индикатор.

Рис. 11. Структурная схема псевдокогерентного радиолокатора высокой скважности.
Заключение
В ходе выполнения курсовой работы были получены ценные навыки расчета параметров РЭС разных сторон РЭ конфликта, а также навыки анализа эффективности подавления и помехозащиты. Был произведен эскизный расчёт РЛС и параметров помехозащиты. Определена структура средств помехопостановки и помехозащиты.
Таким образом, курсовая работа достигла всех поставленных целей и задач.
Список использованных источников
1. Бакулев П.А. Радиолокационные системы. - М.,: Радиотехника, 2004 г.
2. Радзиевский В.Г. Сирота А.А. Теоретические основы радиоэлектронной разведки. - М.,: Радиотехника, 2004 г.
3. Гоноровский И.С. Радиотехнические цепи и сигналы. – М.: Радио и связь, 1986 г.
4. Кузьмин С.З. Цифровая обработка РЛИ. – М.: Советское радио, 1967 г.
5. Воскресенский Д.И. Антенны и устройства СВЧ. – М.: Радио и связь, 1981 г.
6. Финкельштейн М.И. Основы радиолокации: Учебник для вузов. – 2-е изд., перераб. и доп. – М.: Радио и связь, 1983. – 536 с., ил.
7. Основы системного проектирования радиолокационных систем и устройств: Методические указания по курсовому проектированию по дисциплине «Основы теории радиотехнических систем»: Рязан. гос. радиотехн. акад.; Сост.: В.И. Кошелев, В.А. Федоров, Н.Д. Шестаков. Рязань, 1995, 60 с.