| Скачать .docx |
Курсовая работа: Курсовая работа: Реализация устройства контроля переданной информации с использованием модифицированного кода Хем
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ВОЛОГОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Дисциплина: Организация ЭВМ и систем
Кафедра: УВС
Курсовой проект
Реализация устройства контроля переданной информации с использованием модифицированного кода Хемминга
Выполнил: Кириллов А. С.
Группа: ЭВ-31
Проверил: Машкин А. В.
Вологда 2011
СОДЕРЖА НИЕ
ВВЕДЕНИЕ
1. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
2. Разработка структурной схемы устройства
3. РАЗРАБОТКА ПРИНЦИПИАЛЬНОЙ ЭЛЕКТРИЧЕСКОЙ СХЕМЫ
3.1 Центральный процессор КР580ВМ80А
3.2 Генератор тактовых импульсов КР580ГФ24
3.3 Системный контроллер и шинный формирователь КР580ВК28
3.4 Буферный регистр КР580ИР82
3.5 Параллельный интерфейс КР580ВВ55А
3.6 Постоянное запоминающее устройство КР556РТ7
3.7 Оперативное запоминающее устройство КР537РУ8А
3.8 Дешифратор возбуждения одноразрядного семисегментногоцифрового светодиодного индикатора АЛС324
3.9 Индикатор цифровой АЛС324А
4. КАРТА ПАМЯТИ
5. ПРИНЦИП РАБОТЫ ПРОГРАММЫ
6. ЛИСТИНГ ПРОГРАММЫ
ЗАКЛЮЧЕНИЕ
СПИСОК СПРАВОЧНОЙ ЛИТЕРАТУРЫ
ВВЕДЕНИЕ
Вычислительная техника развивалась такими быстрыми темпами, что давно уже принято говорить о поколениях вычислительных машин. За 30 лет своего бурного развитиямикропроцессорные системы прошли путь от специализированных комплектов интегральных схем к сложным однокристальным микроконтроллерам, имеющих в своем составе целый набор самых различных программируемых элементов. Низкая стоимость, малые габаритныеразмеры и энергопотребление таких машин позволяет встраивать их во вновь проектируемые устройства. Широкое применение микропроцессоров ставит задачу подготовки специалистов, способных обслуживать эту сложную технику.
1. ТЕХНИЧЕСКОЕ ЗАДАН ИЕ
Реализация устройстваконтроля переданной информации c использованием модифицированного кода Хемминга.
С порта А5h считать 2000 байт, разместив их в ОЗУ, начиная с адреса B000h. Считать информационными 4 бита, расположенные во 2, 4, 5 и 6 разрядах передаваемых байт. Остальные разряды в байте отведены для хранения кода Хемминга. Индицировать номер ячейки ОЗУ, в которой была произведена коррекция ошибки или выдать сообщение о невозможности коррекции. Считывание последовательности байт с порта осуществлять путем нажатия кнопки. Переход к проверке содержимого следующих ячеек памяти так же осуществлять путем нажатия на кнопку.
2. Разработка структурной схемы устройства
Необходимыми элементами в любой системе являются: микропроцессор, генератор импульсов, системный контроллер микропроцессора, буферные схемы адреса и данных, запоминающие устройства и устройства ввода-вывода (рис 2.1.)
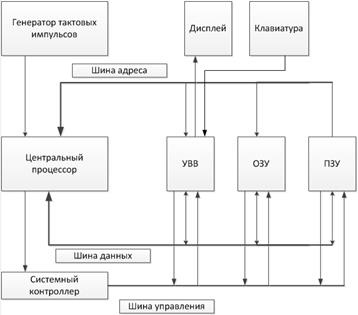
Рис. 2.1. Структурная схема устройства
Главным элементом этой системы является микропроцессор т.к. он управляет работой всей системы. Генератор тактовых импульсов фаз С1, С2 предназначен для синхронизации работы микропроцессора. ПЗУ (постоянное запоминающее устройство) используется для храненияконстант и программы работы устройства. Для хранения стека и переменных величин используется ОЗУ (оперативное запоминающее устройство). Устройство ввода вывода предназначено для сопряжения различных типов периферийных устройств с магистралью данных систем обработки информации. Фиксатор состояния применяется для формирования управляющих сигналов и как буферный регистр данных. Для ввода информации используется клавиатура, для вывода – дисплей.
Общий принцип функционирования микропроцессорного устройства заключается в следующем. Из микропроцессора на шину адреса выдается адрес очередной команды. Считанная по этому адресу из памяти (например, из ПЗУ) команда поступает на шину данных и принимается в микропроцессор, где она и исполняется. В счетчике команд микропроцессора формируется адрес следующей команды. После окончания исполнения данной команды на шину адреса поступает адрес следующей команды и т. д.
В процессе исполнения команды могут потребоваться дополнительные обращения кпамяти для вызова в микропроцессор дополнительных байтов команды (в случае двух-, трехбайтовых команд), операндов или записи в память числа, выдаваемого из микропроцессора.
Микропроцессор КР580ВМ80А способен адресовать до 64 килобайт памяти, но так как такой объем памяти не требуется, то старшие биты адреса будут использоваться как сигналы выбора микросхем (CS).
3. Разработка принципиальной электрической схемы
3.1 Центральный процессор КР580ВМ80А

Рис3.1 Центральный процессор КР580ВМ80А
Центральный процессорный элемент КР580ВМ80А является функционально законченным однокристальным параллельным 8-разрядным микропроцессором с фиксированной системой команд. В состав БИС входят: 8-разрядное арифметико-логическое устройство (ALU); регистр признаков (RS), фиксирующий признаки, вырабатываемые ALUв процессе выполнения команд; аккумулятор (А); блок регистров для приема, выдачи и хранения информации в процессе выполнения программ, содержащий программный счетчик (РС), указатель стека (SP), регистр адреса (RGA), шесть регистров общего назначения (B, C, D, E, H, L) и вспомогательные регистры (W и Z); схема управления и синхронизации (CU), формирующая последовательности управляющих сигналов для работы ALU и блока регистров; 16-разрядный буферный регистр адреса (ВА); 8-разрядный буферный регистр данных (BD).
Таблица 3.1 Назначение выводов микросхемы КР580ВМ80А
| Вывод | Обозначение | Тип вывода |
Функциональное назначение выводов |
1, 25-27, 29-40 |
A10, A0-A2, A3-A9, A15, A12-A14,A11 | Выходы | Канал адреса |
| 2 | GND | - | Общий |
| 3-10 | D4-D7, D3-D0 | Входы/ Выходы |
Канал данных |
| 11 | UIO | - | Напряжение источника смещения |
| 12 | SR | Вход | Установка в исходное состояние, сброс триггеров разрешения прерывания и захвата шины |
| 13 | HLD | Вход | Захват |
| 14 | INT | Вход | Вход сигнала - запрос прерывания |
| 15,22 | С2, С1 | Входы | Вход фаз 1 и 2 |
| 16 | INTE | Выход | Выход сигнала - разрешение прерывания |
| 17 | RC | Выход | Прием информации |
| Вывод | Обозначение | Тип вывода |
Функциональное назначение выводов |
| 18 | TR | Выход | Выдача информации |
| 19 | SYN | Выход | Сигнал синхронизации |
| 20 | UCC 1 | Напряжение питания +5В | |
| 21 | HLDA | Выход | Выход сигнала - подтверждение захвата |
| 23 | RDY | Вход | Сигнал «Готовность» |
| 24 | WI | Выход | Сигнал «Ожидание» |
| 28 | Ucc2 | - | Напряжение питания +12В |
3.2 Генератор тактовых импульсов КР580ГФ24

Рис 3.2 Генератор тактовых импульсов КР580ГФ24
ГТИ формирует тактовые импульсы частотой до 2.5мГц, амплитудой 12 В, тактовые импульсы амплитудой до 5 В для ТТЛ-схем, а также некоторые управляющие сигналы для микропроцессорной системы. Генератор тактовых сигналов состоит из генератора опорной частоты, счетчика-делителя на 9, формирователя фаз С1, С2 и логических схем. Для работы ГТИ необходимо подключение внешнего кварцевого резонатора с частотой колебаний в 9 раз больше чем частота выходных тактовых импульсов ГТИ.
Назначение выводов микросхемы приведено в таблице 3.2.
Таблица 3.2. Назначение выводов микросхемы КР580ГФ24
| Вывод | Обозначение | Тип вывода | Функциональное назначение выводов |
| 1 | SR | Выход | Установка в исходное состояние микропроцессора и системы |
| 2 | RESIN | Вход | Установка 0 |
| 3 | RDYIN | Вход | Сигнал «Готовность» |
| 4 | RDY | Выход | Сигнал «Готовность» |
| 5 | SYN | Вход | Сигнал синхронизации |
| 6 | C | Выход | Тактовый сигнал, синхронный с фазой С2 |
| 7 | STB | Выход | Стробирующий сигнал состояния |
| 8 | GND | — | Общий |
| 9 | UCC2 | Вход | Напряжение питания +12В |
| 10 | C2 | Выход | Тактовые сигналы — фаза С2 |
| 11 | C1 | Выход | Тактовые сигналы — фаза С1 |
| 12 | OSC | Выход | Тактовые сигналы опорной частоты |
| 13 | TANK | Вход | Вывод для подключения колебательного контура |
| 14,15 | XTAL1, XTAL2 |
Вход | Выводы для подключения резонатора |
| 16 | UCC1 | Вход | Напряжение питания +5В |
3.3 Системный контроллер и шинный формирователь КР580ВК28
Рис 3.3 Системный контроллер и шинный формирователь КР580ВК28
Системный контроллер и шинный формирователь КР580ВК28 предназначен для фиксации слова-состояния МП, выработки системных управляющих сигналов, буферизации шины данных МП и управлением передачи данных. Системный контроллер формирует управляющие сигналы по сигналам состояния микропроцессора при обращении к ЗУ: RD и WR; при обращении к УВВ: RDIO и WRIO, а также обеспечивает прием и передачу 8-разрядной информации между каналом данных микропроцессора по выводам D7-D0 и системным каналом по выводам DB7-DB0. Регистр состояния по входному сигналу STB фиксирует информацию состояния микропроцессора в первом такте каждого машинного цикла. Дешифратор управляющих сигналов формирует один из управляющих сигналов в каждом машинном цикле: RD, WR, RDIO, WRIO, INTA. Асинхронный сигнал BUSEN управляет выдачей данных с буферной схемы и управляющих сигналов: при напряжении высокого уровня все выходы микросхемы переводятся в высокоомное состояние.
Назначение выводов микросхемы приведено в таблице 3.3.
Таблица 3.3. Назначение выводов микросхемы
| Вывод | Обозначение | Тип вывода | Функциональное назначение выводов |
| 1 | STB | Вход | Стробирующий сигнал состояния (от ГТИ) |
| 2 | HLDA | Вход | Подтверждение захвата |
| 3 | TR | Вход | Выдача информации |
| 4 | RC | Вход | Прием информации |
5,7 9,11, 13,16, 18,20, |
DB4,DB7, DB3,DB2, DB0,DB1, |
Вход/выход | Канал данных системы |
6,8,10, 12,15,17, 19,21 |
D4,D7,D3, D2,D0,D1, D5,D6 |
Входы/выходы данных со стороны МП | |
| 14 | GND | — | Общий |
| 22 | BUSEN | Вход | Управление передачей данных и выдачей сигналов |
| 23 | INTA | Выход | Подтверждение запроса прерывания |
| 24 | RD | Выход | Чтение из ЗУ |
| 25 | RD IO | Выход | Чтение из УВВ |
| 26 | WR | Выход | Запись в ЗУ |
| 27 | WR IO | Выход | Запись в УВВ |
| 28 | UCC | Вход | Напряжение питания +5В |
3.4 Буферный регистр КР580ИР82
Рис 3.4 Буферный регистр КР580ИР82
Буферный регистр КР580ИР82, выполняет роль буфера между МП и шиной данных. Буферный регистр КР580ИР82 представляет собой 8-разрядный параллельный регистр с трехстабильными выходами. Обладает повышенной нагрузочной способностью.
Таблица 3.4. Назначение выводов микросхемы
| Вывод | Обозначение | Тип вывода | Функциональное назначение выводов |
| 1 | D0-D7 | Вход | Информационная шина |
| 2 | OE | Вход | Разрешение передачи (управление 3-м состоянием) |
| 10 | GND | — | Общий |
| 11 | STB | Вход | Стробирующий сигнал |
| 12-19 | Q0-Q7 | Выход | Информационная шина |
| 20 | UCC | — | Напряжение питания +5В |
3.5 Параллельный интерфейс КР580ВВ55А
Произведя запись управляющего слова в РУС, можно перевести микросхему в один из трех режимов работы. При подаче SR РУС устанавливается в состояние, при котором все каналы настраиваются на работу в режиме 0 для ввода информации. Формат управляющего слова определения режима работы показан в таблице 3.51.
Параллельный интерфейс КР580ВВ55А предназначен для ввода/вывода параллельной информации различного формата. БИС программируемого параллельного интерфейса (ППИ) может использоваться для сопряжения микропроцессора со стандартным периферийным оборудованием.
В состав БИС входят: двунаправленный 8-разрядный буфер данных (BD), связывающий ППИ с системной шиной данных; блок управления записью/чтением (RWCU), обеспечивающий управление внешними/внутренними передачами данных, управляющих слов и информации о состоянии ППИ; три 8-разрядных канала ввода/вывода (PA, PB, PC) для обмена информацией с внешними устройствами. Режим работы каждого из каналов определяется содержимым регистра управляющего слова (РУС).
Таблица 3.51 Формат управляющего слова, определяющего режим работы:
| Разряд УС | Значение разряда УС | Задаваемый режим работы |
| D7 | 1 | - |
| D6D5 | 00 | Режим 0 для канала ВА и 4-7 разрядов канала ВС |
| 01 | Режим 1 для канала ВА и 4-7 разрядов канала ВС | |
| 1X | Режим 2 для канала ВА и 4-7 разрядов канала ВС | |
| D4 | 0 | Вывод из канала ВА |
| 1 | Ввод в канал ВА | |
| D3 | 0 | Вывод из 4-7 разрядов канала ВС |
| 1 | Ввод в 4-7 разряд канала ВС | |
| D2 | 0 | Режим 0 для канала ВВ и 0-3 разрядов канала ВС |
| 1 | Режим 1 для канала ВВ и 0-3 разрядов канала ВС | |
| D1 | 0 | Вывод из канала ВВ |
| 1 | Ввод в канал ВВ | |
| D0 | 0 | Вывод из 0-3 разрядов канала ВС |
| 1 | Ввод в 0-3 разряды канала ВС |
Рис 3.5 Параллельный интерфейс КР580ВВ55А
Назначение выводов микросхемы приведено в таблице 3.52.
Таблица 3.52. Назначение выводов микросхемы
| Вывод | Обозначение | Тип Вывода |
Функциональное назначение вывода |
1-4, 37-40 |
BA3-BA0, BA7-BA4 |
Входы/ Выходы |
Информационный канал А |
| 5 | RD | Вход | Чтение информации |
| 6 | CS | Вход | Выбор микросхемы |
| 7 | GND | - | Общий |
| 8,9 | A1,A0 | Вход | Младшие разряды адреса |
| 10-17 | BC7-BC4 BC0-BC3 |
Входы/ Выходы |
Информационный канал C |
| 18-25 | BB0-BB7 | Входы/ Выходы |
Информационный канал B |
| 26 | Ucc | - | Напряжение питания |
| 27-34 | D7-D0 | Входы/ Выходы |
Канал данных |
| 35 | SR | Вход | Установка в исходное состояние |
| 36 | WR | Вход | Запись информации |
В нашем случае получено управляющее слово 89h – 10001001 – переводит DD7 в режим ввода/вывода (режим 0). Соответственно данное УС определяет: каналы ВА и ВВ – вывод, а все восемь бит канала ВС – ввод.
3.6 Постоянное запоминающее устройство КР556РТ7
Рис 3.7Постоянное запоминающее устройство КР556РТ7
Микросхема представляет собой однократно программируемое постоянное запоминающее устройство ёмкостью 16 к (2к![]() 8) с тремя состояниями на выходе. Предназначено для хранения программы работы устройства и констант.
8) с тремя состояниями на выходе. Предназначено для хранения программы работы устройства и констант.
Таблица 3.61. Таблица истинности
| Наличие перемычки в матрице | Состояние входа | Состояние выхода |
Операция | ||
| ESE1 | ESE2 | ESE3 | |||
| Есть | 0 | 1 | 1 | 0 | Чтение |
| Независимо от наличия | Любая другая комбинация | Z | Хранение | ||
| Нет | 0 | 1 | 1 | 1 | Чтение |
Таблица 3.62. Назначение выводов микросхемы
| Вывод | Обозначение | Тип вывода | Функциональное назначение выводов |
1,2,3,4,5,6,7,8, 21,22,23 |
A0,A1,A2,A3,A4, A5,A6,A7,A8, A9,A10 |
Входы | Адресные входы |
9,10,11,13,14, 15,16,17, |
D0,D1,D2,D3,D4, D5,D6,D7 |
Выходы | Выходы данных |
| 12 | GND | - | Общий |
| 18,19,20 | ESE3, ESE2, |
Входы | Входы разрешения выборки |
| 24 | Ucc | - | Напряжение питания |
3.7 Оперативное запоминающее устройство КР537РУ8А
Рис 3.8 Оперативное запоминающее устройство КР537РУ8А
Микросхема представляет собой статическое оперативное запоминающее устройство ёмкостью 16 кбит (2к![]() 8).Предназначено для хранения стека ипеременных величин.
8).Предназначено для хранения стека ипеременных величин.
Таблица 3.71. Таблица истинности
| Вход | Вход/выход | Режим работы | ||
| CS1 | CS2 | WR/RD | ||
| 1 | 1 | X | Третье состояние | Хранение |
| 0 | 1 | X | Третье состояние | Хранение |
| 1 | 0 | X | Третье состояние | Хранение |
| 0 | 0 | 1 | Выход | Считывание |
| 0 | 0 | 0 | Вход | Запись |
Таблица 3.72. Назначение выводов микросхемы
| Вывод | Обозначение | Тип вывода | Функциональное назначение выводов |
| 1-8,19,22,23 | A7,A6,A5,A4,A3, A2,A1,A0,A10, A9,A8 |
Входы | Адресные входы |
| 9-17 | D0,D1,D2,D3,D4, D5,D6,D7 |
Выходы | Выходы данных |
| 12 | GND | - | Общий |
| 18,20 | Входы | Входы выборки кристалла | |
| 21 | WR/WD | Входы | Вход разрешения записи считывания |
| 24 | Ucc | - | Напряжение питаания |
3.8 Дешифратор возбуждения одноразрядного семисегментного цифрового светодиодного индикатора АЛС324А

Рис 3.10 Дешифратор возбуждения одноразрядного семисегментного цифрового светодиодного индикатора АЛС324А
Микросхема состоит из 7 узлов, формирующих управляющий сигнал для одного из семи сегментов индикатора.
Таблица 3.81. Назначение выводов микросхемы
| Выход | Обозначение | Тип вывода | Функциональное назначение выводов |
| 2, 3, 4, 5 | A2, A1,A3, A0 | Входы | Входы BCD чисел |
| 6 | DF | Вход | |
| 8 | GND | - | Общий |
| 9-14,15 | a, b, c, d, e, f,g |
Выходы | Семисегментные выходы “a”, “b”, “c”, “d”, “e” “f”, “g” |
| 1 | DF0 | Выход | |
| 16 | Ucc | Напряжение питания |
Таблица 3.82. Таблица истинности
| Входы | Выходы | |||||||||
| 5 | 3 | 2 | 4 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
| 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 |
| 1 | 0 | 0 | 0 | 0 | 1 | 1 | 0 | 0 | 0 | 0 |
| 0 | 1 | 0 | 0 | 1 | 1 | 0 | 1 | 1 | 1 | 0 |
| 1 | 1 | 0 | 0 | 1 | 1 | 1 | 1 | 0 | 1 | 0 |
| 0 | 0 | 1 | 0 | 0 | 1 | 1 | 0 | 0 | 1 | 1 |
| 1 | 0 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 1 |
| 0 | 1 | 1 | 0 | 1 | 0 | 1 | 1 | 1 | 1 | 1 |
| 1 | 1 | 1 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 |
| 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| 1 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 |
| 0 | 1 | 0 | 1 | 0 | 0 | 0 | 1 | 1 | 0 | 1 |
| 1 | 1 | 0 | 1 | 0 | 1 | 1 | 0 | 1 | 1 | 1 |
| 0 | 0 | 1 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | 1 |
| 1 | 0 | 1 | 1 | 1 | 1 | 1 | 0 | 1 | 1 | 1 |
| 0 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 |
| 1 | 1 | 1 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
3. 9 Индикатор цифровой АЛС324А
Рис.3.11 Индикатор цифровой АЛС324А.
Выводит на экран цифры в зависимости от сигналов на входах в семисегментном коде. Состоит из семи светодиодов. Единица, пришедшая на вход, приводит к свечению соответствующего сегмента.
4. КАРТА ПАМЯТИ
| Адрес | Назначение адреса |
| 0000h – 07D0h | ПЗУ |
| 0000h – 0083 | область ПЗУ, занимаемая программой |
| В000h – В7D0h | ОЗУ |
5. ПРИНЦИП РАБОТЫ ПРОГРАММЫ
Принцип работы программы основан на том, что с использованием модифицированного кода Хемминга можно проводить проверку считанной информации на наличие ошибок. Существует возможность исправить однократные ошибки и обнаружить двойные. Программа управляет считыванием информации с порта, затем заносит их в оперативную память. По нажатию кнопки начинается проверка содержимого на наличие ошибок. На основе маскирования определенных бит и контроля четности формируется четырехбитная характеристическая комбинация, каждому значению которой соответствует свое решение.Таких решений в результате получается четыре:
1. Нет ошибки.Программа просто начинает проверку следующего байта данных, занесенных в ОЗУ.
2. Есть двойная ошибка, тогда выводится сообщение о двойной ошибке в виде адреса, где она зафиксирована, но только с тем различием, что у выводимого адреса будут обнулены четыре старших бита. То есть такое сообщение об ошибке будет иметь вид 0ххх. Программа ждет нажатия кнопки для дальнейшей работы.
3. Ошибка в контрольном бите. Исправляется с помощью заданной маски. Номер ячейки выводится на индикаторы. Программа ждет нажатия кнопки для дальнейшей работы.
3. Есть одиночная ошибка. Ее исправление начинается с формирования маски, в которой все биты будут установлены в ноль и лишь один в единицу. Как раз тот, что должен будет быть исправлен. Далее, с помощью операции XOR (Исключающее ИЛИ) над содержимым ячейки памяти и маской ошибка будет исправлена. Номер ячейки, в которой была ошибка, выводится на индикаторы. Программа ждет нажатия кнопки для дальнейшей работы.
6. ЛИСТИНГ ПРОГРАММЫ
| Адрес | Мнемонический код | Код | Комментарии |
| 0000 | MVIA, 89h | 3E | заносим упр. слово в аккумулятор |
| 0001 | 89 | ||
| 0002 | OUT 3h | D3 | отправляем 89 (10001001) в РУС |
| 0003 | 03 | ||
| 0004 | LXI D,B000h | 11 | Задаем начальное значение регистровой паре, содержащей адрес ячейки памяти |
| 0005 | 00 | ||
| 0006 | B0 | ||
| 0007 | LXI B,7D0h | 01 | Задаем начальное значение регистровой паре, содержащей счетчик |
| 0008 | D0 | ||
| 0009 | 07 | ||
| 000A | IN 2h | DB | Прием сигнала от кнопки для начала записи последовательности байт в ОЗУ |
| 000B | 02 | ||
| 000C | m1: IN A5h | DB | Начало цикла, записывающего в ОЗУ принимаемую с порта информацию |
| 000D | A5 | ||
| 000E | STAX D | 12 | Запись содержимого аккумулятора в ячейку памяти, адрес которой хранится в DE |
| 000F | INX D | 13 | Выбираем адрес следующей ячейки |
| 0010 | DCX B | 0B | Счетчик записанных байт уменьшаем |
| 0011 | JNZ m1 | C2 | Если записаны не все 2000 байт, то переходим на следующий оборот цикла |
| 0012 | 0C | ||
| 0013 | 00 | ||
| 0014 | LXI D, AFFFh | 11 | Задаем начальное значение регистровой паре, содержащей адрес ячейки памяти |
| 0015 | FF | ||
| 0016 | AF | ||
| 0017 | LXI B,7D1h | 01 | Задаем начальное значение регистровой паре, содержащей счетчик |
| 0018 | D1 | ||
| 0019 | 07 | ||
| 001A | m2: IN 2h | DB | Прием сигнала от кнопки для начала проверки |
| 001B | 02 | ||
| 001C | m7: DCX B | 0B | Уменьшаем регистр-счетчик |
| 001D | JZ m11 | CA | Если обработаны все занесенные в память байты, то переход на завершение программы |
| 001E | 83 | ||
| 001F | 00 | ||
| 0020 | INX D | 13 | Выбор следующей ячейки памяти изменением регистра, содержащего адрес |
| 0021 | LDAX D | 1A | Запись байта информации в аккумулятор из ячейки по адресу из DE |
| 0022 | ANI 78h | E6 | Используем маску для отделения бит, важных для составления и анализа первого синдрома |
| 0023 | 78 | ||
| 0024 | JPO m3 | E2 | Если количество бит, выставленных в единицу – четное, то ошибки в анализируемых битах нет |
| 0025 | 29 | ||
| 0026 | 00 | ||
| 0027 | MVI Н,4h | 26 | Выполняется только тогда, когда есть ошибка. Запись в Н 100b |
| 0028 | 04 | ||
| 0029 | m3:LDAXD | 1A | Запись байта информации в аккумулятор из ячейки по адресу из DE |
| 002A | ANI 66h | E6 | Используем маску для отделения бит, важных для составления и анализа второго синдрома |
| 002B | 66 | ||
| 002C | JPO m4 | E2 | Если количество бит, выставленных в единицу – четное, то ошибки в анализируемых битах нет |
| 002D | 33 | ||
| 002E | 00 | ||
| 002F | MVI A, 2h | 3E | Начало участка, выполняемого только тогда, когда есть ошибка. Запись в (А) 10b |
| 0030 | 02 | ||
| 0031 | ADD H | 84 | Прибавляем регистр H к (А) |
| 0032 | MOV H,A | 67 | Заносим в регистр Н результат суммирования. Т.е. в Н оказывается х10b |
| 0033 | m4:LDAX D | 1A | Запись байта информации в аккумулятор из ячейки по адресу из DE |
| 0034 | ANI 55h | E6 | Используем маску для отделения бит, важных для составления и анализа третьего синдрома |
| 0035 | 55 | ||
| 0036 | JPO m5 | E2 | Если количество бит, выставленных в единицу – четное, то ошибки в анализируемых битах нет |
| 0037 | 3D | ||
| 0038 | 00 | ||
| 0039 | MVI A, 1h | 3E | Начало участка, выполняемого только тогда, когда есть ошибка. Запись в (А) 1b |
| 003A | 01 | ||
| 003B | ADD H | 84 | Прибавляем регистр H к (А) |
| 003C | MOV H,A | 67 | Заносим в регистр Н результат суммирования. Т.е. в Н оказывается хх1b |
| 003D | m5:LDAX D | 1A | Запись байта информации в аккумулятор из ячейки по адресу из DE |
| 003E | ANI FFh | E6 | Операция И по результатам которой производится проверка четности. Реализация проверки по контрольному биту |
| 003F | FF | ||
| 0040 | JPOm6 | E2 | Если количество бит, выставленных в единицу – четное, то ошибки в анализируемых битах нет |
| 0041 | 47 | ||
| 0042 | 00 | ||
| 0043 | MVIA, 8h | 3E | Начало участка, выполняемого только тогда, когда есть ошибка. Запись в (А) 1000b |
| 0044 | 08 | ||
| 0045 | ADD H | 84 | Прибавляем регистр H к (А) |
| 0046 | MOV H,A | 67 | Заносим в регистр Н результат суммирования. Т.е. в Н оказывается 1хххb |
| 0047 | m6: MOV A, H | 7C | Заносим в регистр А результат предыдущих проверок. |
| 0048 | CPI 0h | FE | Сравнение с нулем. В регистре Н может оказаться 0 только, если ошибки нет |
| 0049 | 00 | ||
| 004A | JZm7 | CA | Если ошибки нет, то переход на анализ следующего байта |
| 004B | 1C | ||
| 004C | 00 | ||
| 004D | CPI 8h | FE | Значение регистра Н от 1h до 7h говорит, что зафиксирована двойная ошибка |
| 004E | 08 | ||
| 004F | JPm8 | F2 | Если в ходе сравнения вычитанием получилось положительное число, значит двойной ошибки нет. Переход к исправлению одинарной. |
| 0050 | 5D | ||
| 0051 | 00 | ||
| 0052 | MOV A,D | 7A | Заносим в регистр А старший байт адреса |
| 0053 | ANI 0Fh | E6 | С помощью операции И обнуляем четыре старших бита |
| 0054 | 0F | ||
| 0055 | OUT 0h | D3 | Вывод содержимого А на индикаторы, предназначенные для отображения старшей части адреса |
| 0056 | 00 | ||
| 0057 | MOV A,E | 7B | Заносим в регистр А младший байт адреса |
| 0058 | OUT 1h | D3 | Вывод содержимого А на индикаторы, предназначенные для отображения младшей части адреса |
| 0059 | 01 | ||
| 005A | JMP m2 | C3 | Переход на запрос продолжения обработки данных, поступивших в ОЗУ |
| 005B | 1A | ||
| 005C | 00 | ||
| 005D | m8: CPI 8h | FE | Значение регистра Н 1000b говорит, что зафиксирована ошибка в контрольном бите |
| 005E | 08 | ||
| 005F | JNZ m9 | C2 | Если ошибка не в контрольном бите, то одинарная ошибка в одном из оставшихся семи битах. Переход к его исправлению |
| 0060 | 6D | ||
| 0061 | 00 | ||
| 0062 | XRI 80h | EE | Исправление в контрольном бите |
| 0063 | 80 | ||
| 0064 | MOV A,D | 7A | Заносим в регистр А старший байт адреса |
| 0065 | OUT 0h | D3 | Вывод на индикаторы старшего байта адреса |
| 0066 | 00 | ||
| 0067 | MOV A,E | 7B | Заносим в регистр А младший байт адреса |
| 0068 | OUT 1h | D3 | Вывод на индикаторы младшего байта адреса |
| 0069 | 01 | ||
| 006A | JMP m2 | C3 | Переход на запрос продолжения обработки данных, поступивших в ОЗУ |
| 006B | 1A | ||
| 006C | 00 | ||
| 006D | m9: SUI 8h | D6 | Вычитая 1000b, преобразуем содержимое регистра к номеру бита, где зафиксирована ошибка |
| 006E | 08 | ||
| 006F | MOV H,A | 67 | Содержимое аккумулятора переносим в Н |
| 0070 | MVI A, 80h | 3E | Записываем в А байт, который будет использоваться для коррекции ошибки |
| 0071 | 80 | ||
| 0072 | m10: RAL | 17 | Сдвигаем единицу столько раз, сколько указано в Н |
| 0073 | DCR H | 25 | |
| 0074 | JNZ m10 | C2 | |
| 0075 | 72 | ||
| 0076 | 00 | ||
| 0077 | MOV H,A | 67 | Переносим в Н получившуюся маску для исправления ошибки |
| 0078 | LDAX D | 1A | Заносим в А подлежащий исправлению байт |
| 0079 | XRA H | AC | С помощью операции XOR исправляем ошибку |
| 007A | MOV A,D | 7A | Заносим в регистр А старший байт адреса |
| 007B | OUT 0h | D3 | Вывод на индикаторы старшего байта адреса |
| 007C | 00 | ||
| 007D | MOV A,E | 7B | Заносим в регистр А младший байт адреса |
| 007E | OUT 1h | D3 | Вывод на индикаторы младшего байта адреса |
| 007F | 01 | ||
| 0080 | JMP m2 | C3 | Переход на запрос продолжения обработки данных, поступивших в ОЗУ |
| 0081 | 1A | ||
| 0082 | 00 | ||
| 0083 | m11: NOP | 00 | Конец программы |
| 0084 | |||
| 0085 | |||
| 0086 | |||
| 0087 | |||
| 0088 | |||
| 0089 | |||
| 008A | |||
| 008B | |||
| 008C | |||
| 008D | |||
| 008E | |||
| 008F | |||
| 0090 |
ЗАКЛЮЧЕНИЕ
В ходе данной работы была спроектирована микропроцессорная система для контроля переданной информации использованием модифицированного кода Хемминга. Эта система собрана на базе микропроцессорного комплекта КР580, а также некоторого числа дополнительных элементов. Была разработана как аппаратная, так и программная часть системы. Так как система состоит из интегральных микросхем, то она отличается малыми размерами и высокой надежностью.
СПИСОК СПРАВОЧНОЙ ЛИТЕРАТУРЫ
1. Абрайтис В.Б.Микропроцессоры и микропроцессорные комплекты интегральных микросхем: Справочник. В 2 т. / Абрайтис В.Б., Аверьянов Н.Н., Белоус А.И. и др.; Под ред. В.А. Шахнова. - М.: Радио и связь, 1988. - 368 с.
2. Горбунов В.Л. Справочное пособие по микропроцессорам и микроЭВМ / В.Л. Горбунов, Д.И. Панфилов, Д.Л. Преснухин. - М.: Высш. шк., 1988 . - 272 с.: ил.
3. Калабеков Б. А. Микропроцессоры и их применение в системах передачи и обработки сигналов: Учеб. Пособие для ВУЗов. — М.: Радио и связь, 1988.
4. Угрюмов Е.Цифровая схемотехника / Е. Угрюмов – БХВ Санкт-Петербург, 2000 – 528с.