| Скачать .docx |
Курсовая работа: Курсовая работа: Система сжатия и уплотнения каналов
ВВЕДЕНИЕ
ОПРЕДЕЛЕНИЕ ЧАСТОТЫ ОПРОСА
КВАНТОВАТЕЛЬ
АДАПТИВНАЯ КОММУТАЦИЯ.
СТРУКТУРНАЯ СХЕМА И ОПИСАНИЕ СИСТЕМЫ УПЛОТНЕНИЯ
СТРУКТУРА ГРУППОВОГО СИГНАЛА
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
Определение частоты опроса
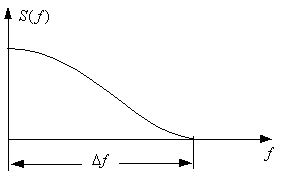
В нашем случае спектр сигнала гауссовский. Из [2] по модели №4 сигнала с гауссовским спектром (рис. 1) определяем частоту опроса F0 . По заданию на проект, показатель верности gэф = 0.7 % , а ширина спектра сигнала D f=300 Гц. Применим эту модель к интерполяции по Лагранжу при n=1,2,3, используя также следующие соотношения:
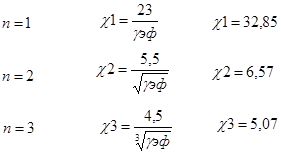
Частоту опроса определим по формуле: ![]() , i=1,2,3.
, i=1,2,3.
![]()
![]()
![]()
Теперь проанализируем полученные результаты. Частота опроса F02 имеет существенный выигрыш по сравнению с F01 и проигрывает частоте F03 , так как больше неё. Но выберем F02 , так как при реализации на этой частоте обеспечивается заданное качество и аппаратная сложность меньше, чем при F03.
Квантователь
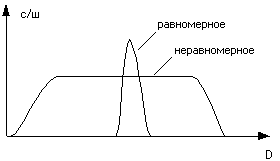
Неравномерное квантование позволяет получить постоянное отношение сигнал/шум в достаточно широком диапазоне входного сигнала по сравнению с равномерным квантованием (рис.2).
По техническому заданию в данной курсовой работе задан квантователь АИКМ. Возможны следующие реализации:
1. С адаптацией по входу:
а) С переменным шагом квантования
б) С переменным коэффициентом усиления
2. С адаптацией по выходу:
а) С переменным шагом квантования
б) С переменным коэффициентом усиления
Главным недостатком систем с адаптацией по выходу является необходимость передавать по каналу связи еще либо коэффициент усиления, либо шаг квантования. Поэтому будем использовать адаптацию по выходу с переменным коэффициентом усиления, ее проще реализовать аппаратно.
Структурная схема выглядит следующим образом:
![]()
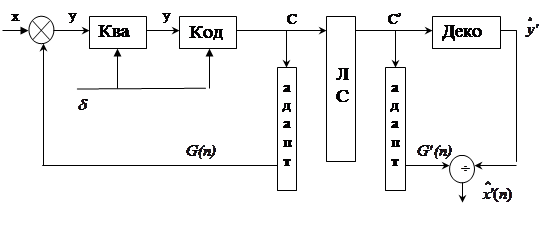
Квант – квантователь, Код – кодер, Адапт – адаптация, Декод – декодер, ЛС – линия связи
Дискретизация входного сигнала осуществляется по выходному квантованному сигналу или по последовательности кодовых слов.
Недостатком данной схемы является высокая чувствительность к ошибкам в кодовых словах. Эти ошибки ведут к неправильной установке коэффициента усиления.
Исследование этой схемы показало, что по сравнению с ![]() - квантователем достигается выигрыш не менее 5 дБ при том же динамическом диапазоне сигнала. Но этот выигрыш зависит от ФПВ сигнала и от его динамического диапазона.
- квантователем достигается выигрыш не менее 5 дБ при том же динамическом диапазоне сигнала. Но этот выигрыш зависит от ФПВ сигнала и от его динамического диапазона.
Рассчитаем сколько нужно разрядов, для того чтобы выполнить условие отношения сигнал/шум равным 35дБ. Представим квантованный сигнал в виде:
![]() , где е
(n
) – шум квантования.
, где е
(n
) – шум квантования.
В дальнейшем предполагаем что шум квантования является стационарным белым шумом, некоррелированным с входным сигналом и имеющим равномерное распределение в интервале ![]() в этом случае дисперсия шумов квантования:
в этом случае дисперсия шумов квантования:
![]()
Для равномерной ФПВ дисперсия составляет: ![]() , т.к
, т.к ![]()
Шаг квантования определяется по формуле: ![]() ;
;
Отношение С/Ш квантования определяется по формуле:

АИКМ дает преимущество по сравнению с равномерным квантователем порядка 3 дб. Величина выигрыша зависит от величины корреляции между отсчетами.
Следовательно разрядность квантователя В определяется как:
q-6=6В+4,8 В=![]()
По заданию на курсовой проект ОСШ q=35дб,следовательно
В=![]() Возьмем В=4
Возьмем В=4
Адаптивная коммутация
Адаптивная коммутация представляет собой способ уменьшения частоты опроса датчиков в соответствии со скоростью изменения входного сигнала. Очередность передачи информации от различных датчиков может производиться с такими характеристиками:
1) Наибольшая текущая погрешность аппроксимации.
2) Экстремальное значение входных сигналов и их производных
3) Отклонение параметров от нормы.
Система позволяет учитывать приоритет отдельных сообщений по отношению к источникам, а так же передавать информацию в каналах связи в реальных масштабах времени. В данной системе производиться предварительный опрос всех каналов, выявляется канал с наибольшей погрешностью аппроксимации и информация этого канала поступает в линию связи. Обобщенная структурная схема системы (рис. 4)
 |
K1
Д1 П П А А Ц П Б С
KN
ДN П П А
Г И А П
Рис. 4
ГИ – генератор импульсов; ППА – преобразователь погрешности аппроксимации; АП – анализатор помех; БС – блок считывания; К – ключ
В каждом канале есть преобразователь погрешности аппроксимации (ППА). Анализатор погрешности (АП), путем последовательного опроса ППА, выделяет канал с наибольшей погрешностью аппроксимации и открывает ключ этого канала. После АЦП сигнал в параллельном коде поступает в блок считывания (БС) куда поступает и адрес канала. В БС производиться преобразование параллельного кода в последовательный. После выдачи сигнала в линию связи из БС, в АП поступает сигнал «конец» и срабатывает АП. Затем все повторяется снова.
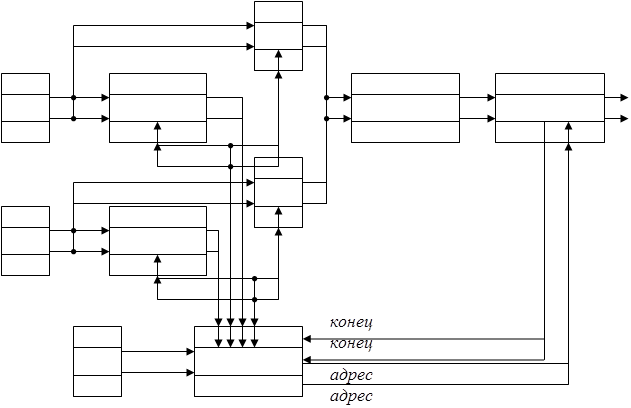
Рассмотрим возможности построения блока анализатора помех. Известно параллельное, последовательное и параллельно-последовательное построение блока АП. Наибольшим быстродействием обладает схема АП при параллельном анализе погрешности. (Рис. 5)
 |
 |
![]()
![]() Д1
Д1
 |
П П А
 |
|
 |
 |
![]()
![]()
![]()
![]() ДN
М К А Ц П Б С
ДN
М К А Ц П Б С
С
![]() П П А
П П А
![]()
 З
З
![]() Г Т И
Г Т И
 |
![]()
![]()
![]()
![]()
![]()
![]()
![]() В М С
В М С
Рис. 5
С – сигнал считывания; З – сигнал запрета; МК – мультиплексор; ВМС – выявитель максимального сигнала; ГТИ – генератор тактовых импульсов.
Сигналы от датчиков поступают на входы ППА и мультиплексора. Мультиплексор находиться в закрытом состоянии и открывается с поступлением тактовых импульсов с генератора тактовых импульсов (ГТИ). Мультиплексор – это устройство, предназначенное для передачи сигнала с любого из входов на одну общую выходную шину. Вход, с которого сигнал поступает на выход, выбирается в зависимости от вида параллельного двоичного кода, который подается на управляющие входы. Сигналы с выхода ППА анализируются в блоке ВМС, который представляет собой схему сравнения на n входов. На выходе ВМС формируется параллельный двоичный код, соответствующий номеру канала с наибольшей погрешностью аппроксимации. При поступлении на МК тактового импульса с ГТИ на выход проходит сигнал канала двоичный код номера которого воздействовал на управляющие входы МК. Сигнал датчика и адрес канала в параллельной форме записываются в БС. При поступлении импульсов считывания с ГТИ происходит преобразование параллельного кода в последовательный, и сигнал передается в линию связи.
Наиболее оптимальная [1] по программно-аппаратным затратам является АИКМ4 которую и возьмем. Алгоритм вычисления которой:
![]()
Рассмотрим простейшую схему выделения максимального сигнала с использованием диодных сборок, т.е. диодных схем «И» и операционных усилителей, выходной сигнал которых является двоичным кодом канала с максимальной погрешностью аппроксимации. Использование диодных сборок основано на том, что между операциями алгебры логики и операциями выделения максимума и минимума существует определенная аналогия:
Для получения на выходе на выходе схемы выделения максимального сигнала, соответствующего кода необходимо на выходы этой схемы подключить по определенным правилам к инверсным и прямым входам операционные усилители.
![]() - подключение к инверсному входу,
- подключение к инверсному входу, ![]() - подключение к прямому входу.
- подключение к прямому входу.
Простейшая схема ВМС на 4 входа имеет вид:
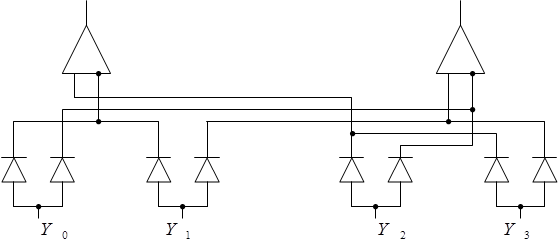
Рис. 6
При достаточном усилении операционных усилителей, когда напряжение на прямом входе больше, чем на инверсном, операционный усилитель находится в режиме насыщения, т.е. на выходе «1». Если наоборот, то операционный усилитель находится в режиме отсечки, т.е. на выходе «0». Для получения хороших результатов, необходимо, что бы характеристики диодов были одинаковыми, а усиление ОУ было больше 1000.
Структурная схема и описание системы уплотнения
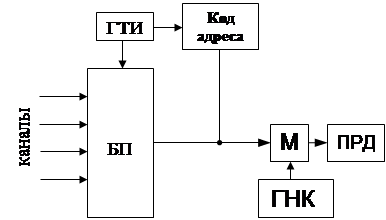

Рис. 8 Структурная схема передающей части адресного уплотнения
При кодовом (адресном) разделение сигнал состоит из двух частей: адреса и самих данных. Адрес содержит информацию о номере канала, которому принадлежит данные. Рассмотрим работу передающей части. Сигналы с каналов запоминаются в блоке памяти (БП) и с приходом тактового импульса первым последовательно на выходе БП появляется СИ, а за ним появляется код адреса канала и данные этого канала из БП. Дальше это модулируется и излучается передатчиком.
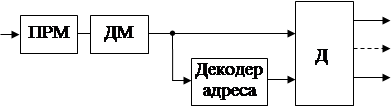
Рис. 9 Структурная схема приемной части.
ГТИ – генератор тактовых импульсов.
ГНК – генератор несущего колебания.
ПРМ – приемник.
ДМ – демодулятор.
Д – демультиплексор.
После приемника сигнал детектируется и при получении синхросигнала запускается схема декодирования адреса, которая преобразует из последовательной формы в параллельную и управляет демультиплексором который перенаправляет сигнал данных в нужный канал схемы сжатия.
Структура группового сигнала
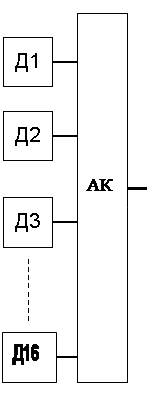
Рассмотрим формирование группового сигнала (рис. 10).
Каждая схема АК содержит 16 датчиков. Они опрашиваются поочередно и в результате на выход системы подключается тот датчик где скорость изменения данных выше. В системе получается 32схем АК. Тогда сигнал с выхода АК будет иметь следующий вид:
 |
Рис.10
Определим длительность одного бита. Всего в схеме будет ![]() квантователя, а длина сигнала с каждого квантователя равна (4бит(адрес)+ 4бит(информации). Определим длину кадра передаваемых данных как (4бит(адрес)+4бит(информации))*32=256. Исходя из этого:
квантователя, а длина сигнала с каждого квантователя равна (4бит(адрес)+ 4бит(информации). Определим длину кадра передаваемых данных как (4бит(адрес)+4бит(информации))*32=256. Исходя из этого:
![]() ,где Fоп
- частота опроса датчика отсюда
,где Fоп
- частота опроса датчика отсюда
![]()
На вход устройства АК с датчиков (Д) поступает аналоговый сигнал. Синхросигнал будет выдаваться каждый цикл опроса 32 ячеек памяти. Как было посчитано ранее на кодировку отсчета необходимо 4 бит. А так как число каналов составляет 500 то для кодировки адреса необходимо 4 бит. Структура группового сигнала имеет вид:
| Синхроимпульс | Адрес канала (4бита) | Информация (4бит) | **** |
Адресовать каждую схему АК нецелесообразно, поскольку на приемной стороне необходимо два декодера адреса, а длина кода адреса не меняется.
![]() На приемной стороне после приема синхроимпульса будет работать блок считывания адреса и коммутации его на нужную схему сжатия. Схема сжатия будет определять следующие 13 бит как адрес + информация. В течении этих 4 бит схема разделения закрыта, так что неправильного определения адреса и информации не произойдет. Перед передачей информации передается синхросигнал, для синхронизации адресного уплотнения внутриканальная синхронизация не нужна - это достоинство данного метода уплотнения. В качестве синхронизации используем М-последовательность длинна которой определяется по формуле:
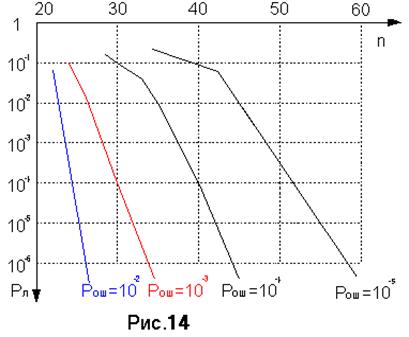
На приемной стороне после приема синхроимпульса будет работать блок считывания адреса и коммутации его на нужную схему сжатия. Схема сжатия будет определять следующие 13 бит как адрес + информация. В течении этих 4 бит схема разделения закрыта, так что неправильного определения адреса и информации не произойдет. Перед передачей информации передается синхросигнал, для синхронизации адресного уплотнения внутриканальная синхронизация не нужна - это достоинство данного метода уплотнения. В качестве синхронизации используем М-последовательность длинна которой определяется по формуле: ![]() . По графику на рис. 11 - по оси абсцисс отложена длина М-последовательности, а по оси ординат вероятность неправильного приема, которая вычисляется по эмпирической формуле:
. По графику на рис. 11 - по оси абсцисс отложена длина М-последовательности, а по оси ординат вероятность неправильного приема, которая вычисляется по эмпирической формуле: ![]() - при вероятности ошибки на символ Рош
=10-3
и задаваясь вероятностью ложного обнаружения синхросигнала Рл
=10-5
, определяем длину синхросигнала n=31. В итоге получаем длину группового сигнала: 31+8*32= 287бит. Теперь найдем частоту ГТИ схемы уплотнения, она должна составлять
- при вероятности ошибки на символ Рош
=10-3
и задаваясь вероятностью ложного обнаружения синхросигнала Рл
=10-5
, определяем длину синхросигнала n=31. В итоге получаем длину группового сигнала: 31+8*32= 287бит. Теперь найдем частоту ГТИ схемы уплотнения, она должна составлять ![]() .
.
Заключение
В данном проекте разработана система сжатия и уплотнения каналов, определены её основные параметры с учётом данных технического задания. Спроектированная система может использоваться как составная часть систем телеметрии или радионавигации. По сравнению с аналоговыми системами, данная цифровая система более стабильна в работе, обеспечивает передачу большего числа информации, обеспечивает лучшую точность передачи информации.
Список использованной литературы
1. Кириллов С. Н., Стукалов Д. Н. Цифровые системы обработки речевых сигналов Рязань, РРТИ, 1995 г.
2. Кириллов С. Н. Курс лекций по дисциплине «Радиосистемы передачи инфорамции». Рязань, 2005 г.
3. Езерский В. В. Курс лекций по дисциплине «Цифровая обработка сигналов и микропроцессоры» Рязань, 2005 г.
4. Свиридов Н. Г. Проектирование радиотехнических систем передачи информации Рязань, РРТИ, 1990 г.