| Скачать .docx |
Реферат: Системы связи 2
Оглавление.
1. Введение. 2
2. Виды модуляции. 3
2.1. Амплитудная модуляция. 3
2.2. Частотная модуляция, фазовая модуляция. 9
2.3. Импульсная модуляция. 12
3. Практическое применение. 16
3.1. Телеметрия. 16
3.1.1. Частотное разделение каналов 17
(частотное уплотнение линии связи).
3.1.2. Временное разделение каналов 22
(временное уплотнение линии связи).
3.1.3. Телеметрический комплекс. 27
3.1.4. Проблемы телеметрии. 30
3.1.5. Аппаратура телеметрии и ее приложения. 31
3.1.6. Другие системы связи. 34
4. Заключение. 39
5. Список используемой литературы. 39
1. ВВЕДЕНИЕ
Предмет «электрическая связь» очень обширен и сложен. Описать его полносьтью в одном реферате невозможно, так как электрическая связь является существенной частью большого числа электронных систем и находит свое применение во всех аспектах нашей жизни. Каждая глава реферата не вдается в детали, а сосредотачивает все внимание на понимании методов и средств связи, осуществляемой с помощью электромагнитных волн. Более того, будут рассмотрены только основные методы связи, стремясь показать их практическое использование.
В любом методе электромагнитной связи всегда можно выделить, во-первых, среду, которая будет переносить информацию, — несущую, во-вторых, саму информацию. Дальнейшее обсуждение будет сосредоточиваться на различных методах переноса информации, т. е. способах объединения информации (или слияния) с несущей, а именно на схемах модуляции.
Существуют три основные схемы модуляции: 1) амплитудная модуляция (AM); 2) угловая модуляция, подразделяющаяся на два очень похожих метода: частотную модуляцию (ЧМ) и фазовую модуляцию (ФМ); 3) импульсная модуляция (ИМ). Различные схемы модуляции совмещают два этих метода или более, образуя сложные системы связи. Телевидение, например, использует как AM, так и ЧМ для различных типов передаваемой информации. Импульсная модуляция совмещается с амплитудной, образуя импульсную амплитудную модуляцию (АИМ), и т.д. Не всегда возможно найти четко выраженные основания для использования того или иного метода модуляции. В некоторых случаях этот выбор предписывается законом (в США контроль осуществляет Федеральная комиссия по связи — ФКС). Необходимо строго придерживаться правил и инструкций независимо от того, какая схема модуляции используется.
Во всех методах модуляции несущей служат синусоидальные колебания угловой частоты wн , которые выражаются в виде
ен =Ан sin(wн t+qн ) (1а)
где Ан - амплитуда, а wн t+qн - мгновенная фаза (отметим, что wн t, так же как и qн , измеряется в градусах или радианах). Фазовый сдвиг qн введен для придания уравнению (la) большей общности. Аналогично модулирующий сигнал может быть представлен как
ем =Ам sin(wм t+qм ) (2a)
для AM, ЧМ и ФМ или в виде импульса в случае импульсной модуляции. Выражение wм может быть использовано для обозначения скорее полосы частот, чем единичной частоты. Например, мы будем рассматривать AM в радиовещании, где модулирующий сигнал состоит из полосы звуковых частот (20—16 000 Гц).
2. ВИДЫ МОДУЛЯЦИИ.
2.1. АМПЛИТУДНАЯ МОДУЛЯЦИЯ (AM)
С качественной стороны амплитудная модуляция (AM) может быть определена как изменение амплитуды несущей пропорционально амплитуде модулирующего сигнала (рис. 1, а). Для модулирующего сигнала болшой амплитуды
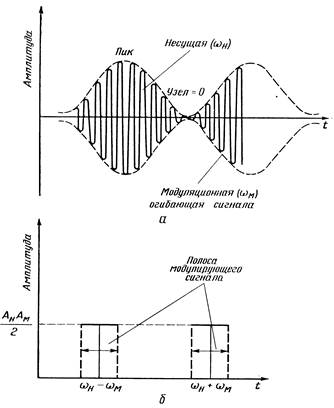
Рис. 1. Амплитудная модуляция (wм <<wн ).
а - форма сигнала; б - спектр частот.
соответствующая амплитуда модулируемой несущей должна быть большой и для малых значений Ам . Эта схема модуляции может быть осуществлена умножением двух сигналов: ен ем . Как будет видно из дальнейшего, это является особым случаем более общего метода модуляции. Для упрощения последующих математических преобразований видоизменим уравнения (la) и (2а), опустив произвольные фазы qн и qм :
ен =Ан cos(wн t) (qн =p/2) (1б)
ем =Ам cos(wм t) (qм =p/2) (2б)
Произведением этих двух выражений является:
ен ем =Ан cos(wн t) × Ам cos(wм t) (3)
Уравнение (3) показывает, что амплитуда модулированной несущей будет изменяться от нуля (когда wм t = 900 , cos(wм t)=0) до Ан Ам (когда wм t = 00 , cos(wм t)=1). Член Ам cos(wм t) × Ан является амплитудой модулированных колебаний и прямо зависит от мгновенного значения модулирующей синусоиды. Уравнение (3) может быть преобразовано к виду
 (4а)
(4а)
Это преобразование основано на тригонометрическом тождестве
![]() (5)
(5)
Уравнение (4a) представляет собой сигнал, состоящий из двух колебаний с частотами w1 =wн +wм и w2 =wн -wм и амплитудами Ан Ам /2. Переписывая выражение для модулированного колебания (4a), получим
![]() (4б)
(4б)
w1 и w2 называются боковыми полосами частот, так как wм обычно является полосой частот, а не одиночной частотой. Следовательно, w1 и w2 представляют собой две полосы частот — выше и ниже несущей (рис. 1,б), т. е. верхнюю и нижнюю боковую полосу соответственно. Вся информация, которую необходимо передать, содержится в этих боковых полосах частот.
Уравнение (4б) было получено для особого случая, когда модулированный сигнал был результатом прямого перемножения ен на ем . В результате уравнение (4б) не содержит компонента на частоте несущей, т. е. частота несущей полностью подавлена. Такой тип модуляции с подавленной несущей иногда преднамеренно проектируется в системах связи, так как это ведет к снижению излучаемой мощности. В большинстве таких систем излучается некоторая часть мощности на частоте несущей, позволяя тем самым приемному устройству настраиваться на эту частоту. Можно также передавать лишь одну боковую полосу, так как она содержит всю существенную информацию о модулирующем сигнале. Приемное устройство затем восстанавливает ем по модуляции одной боковой полосы.
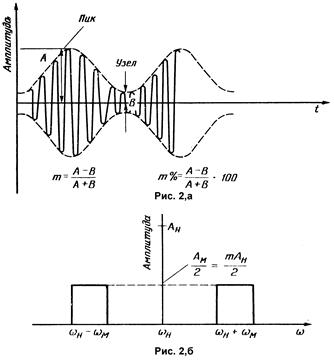
Полное выражение, представляющее амплитудно-модулированное колебание в общем виде, имеет вид
ен ем =Ан cos(wн t)+ Ам cos(wн t)cos(wм t) (6а)
Это выражение описывает как неподавленную несущую (первый член в правой части уравнения), так и произведение, т. е. модуляцию (второй член справа). Уравнение (6a) можно переписать в виде
ен ем =[Ан + Ам cos(wм t)]cos(wн t)= Анм cos(wн t) (6б)
Последнее выражение показывает, как амплитуда несущей изменяется в соответствии с мгновенными значениями модулирующего колебания. Амплитуда модулированного сигнала Анм состоит из двух частей: Ан — амплитуды немодулированной несущей и Ам cos(wм t) — мгновенных значений модулирующего колебания:
Анм =Ан + Ам cos(wм t) (7)
Отношение Ам к Ан определяет степень модуляции. Для Ам =Ан значение Анм достигает нуля при cos(wм t)=-1 (wм t=180°) и Анм =2Ан при cos(wм t)=1 (wм t= 0°). Амплитуда модулированной волны изменяется от нуля до удвоенного значения амплитуды несущей. Отношение
m= Ам /Ан (8)
определяет коэффициент модуляции. Для предотвращения искажений передаваемой информации — модулированного сигнала — значение m должно быть в пределах от нуля до единицы: 0£m£1. Это соответствует Ам £Ан . (Для m=0 Ам = 0, т. е. нет модулирующего сигнала.) Уравнение (6a) может быть переписано с введением m:
ен ем =Ан cos(wн t)[1+m×cos(wм t)] (6в)
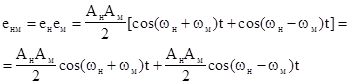
На рис. 2,а показана форма модулированных колебаний и коэффициент модуляции m выражен через максимальное и минимальное значения ее амплитуды (пикового и узлового значений). Рис. 2,б дает представление о спектре модулированных колебаний, который может быть выражен преобразованием уравнения (6):
![]() (6г)
(6г)
несущая верхняя боковая полоса нижняя боковая полоса
На рис. 2,в показан результат модуляции с коэффициентом m, превышающим 100%: m>1.
В таблице на рис. 3 приведены амплитуда и мощьность для каждой из трех частотных компонент модулированного колебания.
| Угловая частота |
Амплитуда |
Относительная амплитуда |
Относительная мощность |
|
| Несущая |
wн |
Ан |
1 |
1 |
| Верхняя боковая полоса |
wн +wм |
Ам /2 |
m/2 |
(m/2)2 |
| Нижняя боковая полоса |
wн -wм |
Ам /2 |
m/2 |
(m/2)2 |
Рнс. 3. Мощность и амплитуда АМ-колебаний.
Для 100%-ной модуляции (m= 1) и мощности несущей 1 кВт полная мощность модулированных колебаний составляет 1 кВт+(1 /2 )2 кВт+(1 /2 )2 кВт=1,5 кВт. Отметим, что при m=1 мощность, заключенная в обеих боковых полосах, составляет половину мощности несущей. Аналогично при m=0,5 мощность в обеих боковых полосах составляет 1 /8 мощности несущей. Указанное выше имеет место лишь для синусоидальной формы AM. Амплитудная модуляция может быть использована в передаче импульсных значений.
При обычной модуляции с двумя боковыми полосами, используемой в радиовещании, информация передается исключительно в боковых полосах. Для того чтобы получить, например, хорошее качество звука, необходимо работать в полосе частот шириной 2М, где М — ширина полосы высококачественного воспроизведения звука (20—20 000 Гц). Это означает, что стандартное АМ-радиовещание, к примеру, с частотами до 20 кГц должно иметь ширину полосы ±20 кГц (всего 40 кГц), учитывая верхнюю и нижнюю боковые полосы. Однако на практике ширина полосы частот по правилам ФКС ограничивается величиной 10 кГц (±5 кГц), которая предусматривает для радиопередачи звука ширину полосы всего лишь 5 кГц, что далеко от условий высококачественного воспроизведения. Радиовещание с частотной модуляцией, как это будет показано ниже, имеет более широкую полосу частот.
Федеральная комиссия связи также устанавливает допуски частоты всех распределений частот в США. Все АМ-радиовещание (535—1605 кГц) имеет допустимые отклонения в 20 Гц, или около 0,002 %. Эта точность и стабильность частоты может быть достигнута путем использования кварцевых генераторов.
Детектирование или демодуляция АМ-колебаний требует выпрямления модулированного сигнала, сопровождаемого исключением несущей частоты с помощью соответствующей фильтрации. Эти две стадии воспроизведения модулирующего сигнала могут быть продемонстрированы па примере колебания, изображенного на рис. 2, а. После выпрямления остается лишь половина колебания, а после фильтрации присутствует лишь его огибающая, которая является воспроизведенным сигналом.
На рис. 4 приведены функциональные схемы передающей и приемной систем с амплитудной модуляцией.
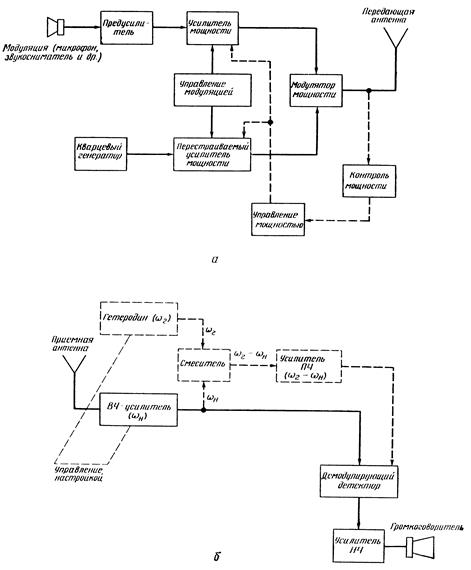
Рис. 4. АМ-система.
а-функциональная схема передатчика; б-функциональная схема приемника.
Передатчик содержит два источника: сигнала модуляции — от микрофона, проигрывателя и т.д. и несущей — от генератора с кварцевой стабилизацией. Модулирующий сигнал и несущая вводятся в модулятор, который вырабатывает модулированный сигнал, который затем передается через антенну. В большинстве передатчиков большой мощности модуляция осуществляется в последнем каскаде системы для того, чтобы избежать необходимости усиливать модулированный сигнал. Усиление несущей и модулирующего сигнала происходит раздельно. Степень модуляции контролируется изменением амплитуды модуляции и поддержанием постоянной амплитуды несущей. С тех пор как передаваемая мощность стала лимитироваться ФКС, большинство радиовещательных станций имеет автоматическое управление и контроль мощности, как это показано штриховыми линиями на рис. 4,а.
Приемник (рис. 4,б) содержит высокочастотный усилитель, который усиливает сигнал, принятый антенной. ВЧ-усилитель настраивается; его частота настройки может быть изменена (в диапазоне радиовещания для АМ-приемников) для выбора нужной станции. Термин «избирательность», примененный к приемнику, относится к способности приемника выбирать отдельную станцию (частоту), не принимая при этом сигналов от примыкающих к ней станций. Например, если приемник имеет плохую избирательность, то при настройке на станцию WQXP (1560 кГц) может быть также принята другая, смежная станция WWRL (1600 кГц). Ясно, что приемник с такой плохой избирательностью является непригодным. Нужно также помнить, что ВЧ-усилитель должен иметь ширину полосы 5 кГц для звуковых сигналов (две боковые полосы требуют ширину полосы ±5 кГц вокруг частоты несущей). Таким образом, требуется полоса частот 10 кГц совместно с высокой избирательностью, которая означает очень крутые спады частотной характеристики перестраиваемого контура, обеспечивающие существенное ослабление сигналов вблизи выбранной частоты, но находящихся вне полосы частот ±5 кГц.
Приемник, показанный на рис. 4,б, является приемником или прямого усиления (сплошные линии), или гетеродинного типа (штриховые линии). В последнем принятый ВЧ-сигнал wн смешивается с колебаниями от местного генератора-гетеродина wг . В результате возникают два сигнала — с частотами wг -wн и wг +wн . Сигнал с разностной частотой wг -wн усиливается усилителем промежуточной частоты (УПЧ) и затем подводится к детектору. На рис. 4,б штриховыми линиями вместо сплошных линий между ВЧ-усилителем и детектором представлена функциональная схема гетеродинного приемника. Такой метод приема позволяет настраиваться на любую станцию, в то время как промежуточная частота остается равной 455 кГц и легко усиливается усилителями с фиксированной частотой настройки. Отметим, что для того, чтобы настроиться на станцию, нужно изменять wг и wн одновременно, и, таким образом, разность wг -wн остается неизменной. Приемник гетеродинного типа имеет лучшую избирательность и гораздо большую чувствительность. Минимально различимый им сигнал составляет 10 мкВ на антенне. Когда мы говорим «различимый», то подразумеваем превышающий уровень шумов приемника.
2.2. ЧАСТОТНАЯ МОДУЛЯЦИЯ, ФАЗОВАЯ МОДУЛЯЦИЯ
В методе частотной модуляции (ЧМ) амплитуда модулирующего сигнала управляет мгновенной частотой несущей. Идеальная ЧМ не вносит изменений в амплитуду несущей. Следовательно, форма напряжения модулированной несущей может быть выражена в виде
ечм =Ан cos[wн t+d×sin(wм t)] (9)
где wн и wм - соответственно несущая частота и частота модуляции, а d - индекс модуляции. Частоты модулированного колебания могут быть получены из выражения cos[wн t+d×sin(wм t)] с использованием тригонометрических формул и специальных таблиц (функции Бесселя)..
Индекс модуляции d определяется как Dwн /wм =Dfн /fм - отношение максимальной девиации частоты (за один период модулирующего сигнала) к частоте модуляции. Детальный анализ частотной модуляции сложен. Рассмотрим на примерах основные черты этого метода. Будем предполагать наличие одиночной частоты модуляции wм (ем =Ам sin(wм t)).
Девиация частоты Dwн прямо пропорциональна мгновенному значению модулирующего сигнала ем =Ам sin(wм t). Таким образом, Dwн можно выразить через ем :
Dwн =kf Ам sin(wн t) (10)
где kf - коэффициент пропорциональности, аналогичный по своему характеру чувствительности; он дает девиацию частоты на 1 В (Dw/В). Следовательно, при wн t= 90° (sin(wн t)= 1) Dwн =kf Ам - максимальная девиация частоты синусоидального модулирующего сигнала. Например, если sin(wн t)=0,5, kf =2p×1000 (рад/с)/В=1000 Гц/В и Ам =10В, то мы получаем Dwн =2p×1000×10×0,5=2p×5000 рад/с, т. е. девиацию частоты несущей 5 кГц. Максимальное значение Dfн при этих условиях (sin(wн t)= 1) будет составлять 10 кГц. Отметим, что, так как sin(wн t ) может быть равным +1 или -1, то Dfн макс =±10 кГц. Если задано значение fм , то можно вычислить индекс модуляции d. Для fм =2000d=10000/2000 (Dfн /fм ); таким образом, d=5. Индекс модуляции должен быть всегда возможно большим, чтобы получить свободное от шумов верное воспроизведение модулирующего сигнала. Девиация частоты Dfн в ЧМ-радиовещании ограничена величиной до +75 кГц. Это приводит к значению d=75/15=5 для звукового модулирующего сигнала с максимальной частотой 15 кГц.
Исследуя изменения частоты несущей с ЧМ, есть соблазн прийти к выводу о том, что ширина полосы, необходимой для ЧМ-передачи, составляет ±Dwн , или 2Dwн , так как несущая меняется по частоте в пределах ±Dwн , т. е. wчм -wн ±Dwн .Этот вывод, однако, полностью ошибочен. Может быть показано, что ЧМ-колебания состоят из несущей и боковых полос аналогично AM с одним лишь существенным различием: при ЧМ существует множество боковых полос (рис. 5). Амплитуды боковых полос связаны весьма сложным образом с индексом модуляции. Отметим, что частоты боковых полос связаны лишь с частотой модулирующего сигнала wм , а не с девиацией частоты Dwн . Для предыдущего примера, когда d=5 и wм =15 кГц (максимум), мы получаем семь пар полос (wн ±wм , wн ±2wм , wн ±3wм , и т.д.) с изменяющимися амплитудами, но превышающими значение 0,04Ан . Все другие пары за пределами wн ± 7wм имеют амплитуды ниже уровня 0,02Ан .
Первая пара боковых полос может быть описана как 0,33А×[sin(wн +wм )t+sin(wн -wм )t] имеет амплитуду 0,33 Ан ; вторая пара - wн ±2wм - имеет амплитуду 0,047Ан . Отметим, что амплитуды различных боковых полос не являются монотонно убывающими по мере того, как их частоты все более и более удаляются от wн . Фактически в приведенном примере с d= 5 наибольшей пo амплитуде (0,4 Ан ) является четвертая пара боковых полос. Амплитуды различных боковых полос получены из специальных таблиц, описывающих эти полосы для различных значений d. Очевидно, что ширина полосы, необходимая для передачи семи пар боковых полос, составляет ±7 × 15 кГц, или 14×15 кГц= 210 кГц (для fм =15 кГц). На этом же основании ширина полосы, необходимая для d=10 (Dwн /wм =10), равна 26fм ; 13 боковых полос в этом случае составят 26×15=390 кГц. Таким образом, частотная модуляция требует значительной ширины полосы частот и, как следствие, используется только при несущих с частотами 100 МГц и выше.
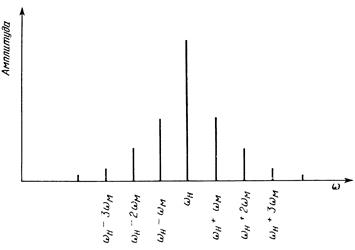
Рис. 5. Боковые полосы ЧМ.
wн -несущая частота; wм -частота модуляции.
Частотно-модулированная связь гораздо менее чувствительна к помехам. Шумы, попадающие в ЧМ-сигнал, будь то атмосферные возмущения (статические), тепловые шумы в лампах и сопротивлениях или любые другие шумы, имеют меньшую возможность влиять на прием, чем в случае AM. Основной причиной этого является попросту тот факт, что большинство шумов амплитудно модулируют несущую. Делая приемник нечувствительным к изменениям амплитуды, практически устраняем эту нежелательную модуляцию. Восстановление информационного сигнала из ЧМ-волны связано лишь с частотным детектированием, при котором выходной сигнал зависит лишь от изменений частоты ЧМ-сигнала, а не от его амплитуды. Большинство приемников содержит усилитель-ограничитель, который поддерживает постоянную амплитуду ЧМ-колебаний, устраняя тем самым любой АМ-сигнал.
Существуют различные методы ЧМ-детектирования и селекции. В основе большинства методов лежит использование наклона частотной характеристики резонансного контура (рис. 6). Амплитуда отклика изменяется с частотой. Для wн +Dwн получаем амплитуду А1 , для wн -Dwн - амплитуду А2, а для частот между
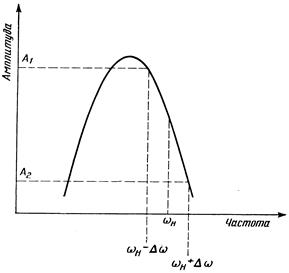
Рис. 6. Принцип использования резонансного контура в качестве частотного детектора.
wн +Dwн и wн -Dwн имеем все промежуточные амплитуды между А1 и А2 . Выходной сигнал соответствует девиации частоты входного сигнала (хотя и не совсем линейно в простом резонансном контуре) и тем самым воспроизводит первоначальный модулирующий сигнал.
Цепь фазовой автоподстройки (ФАП), вскоре стала одним из наиболее распространенных средств ЧМ-детектировапия, особенно применительно к импульсным модулирующим сигналам. Некоторые схемы ФАП снабжены логическими выходными схемами, согласованными с соответствующими входными сигналами импульсной формы.
Как отмечалось ранее, ЧМ —лишь один тип угловой модуляции. Другим является фазовая модуляция. Эта модуляция очень похожа на ЧМ. При фазовой модуляции мгновенная фаза несущей изменяется пропорционально мгновенной амплитуде модулирующего сигнала. Это приводит к изменению несущей частоты wн , как видно из уравнения
wфаз =wн +kф wм Ам sin(wм t) (11)
где kф , - коэффициент пропорциональности, измеряемый в единицах рад/В. Фазовая и частотная модуляция часто используются в одной системе модуляции, так как прием и детектирование обеих идентичны.
Функциональные схемы передатчика и приемника с ЧМ почти те же, что и для AM. Ширина полосы частот ЧМ существенно шире, а несущая частота значительно выше (100 МГц и более). Более широкая полоса частот приводит к более верному воспроизведению входных звуковых сигналов, так что звуки с частотами выше 5 кГц должны передаваться системами ЧМ. В приемниках с частотной модуляцией иногда используется двойное гетеродинирование с двумя промежуточными частотами - 5 МГц и 455 кГц.
2.3. ИМПУЛЬСНАЯ МОДУЛЯЦИЯ (ИМ)
Импульсная модуляция (ИМ) не является в действительности каким-то особым типом модуляции. Этот термин характеризует скорее вид модулирующего сигнала. Далее различают импульсную амплитудную и импульсную частотную модуляции. Здесь учитывают то, каким образом информация представлена — с помощью импульса или ряда импульсов. Можно рассматривать в качестве модулируемой величины амплитуду импульса, или его ширину, или его положение в последовательности импульсов и т. д. Следовательно, существует большое разнообразие методов импульсной модуляции. Все они используют в качестве формы передачи или AM, или ЧМ.
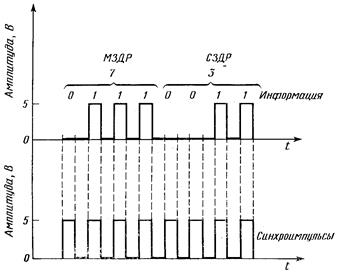
Рис. 7. Последовательность импульсов, отображающих число 37 в двоично-десятичном коде (младший значащий разряд первый).
Импульсная модуляция может быть использована для передачи как цифровых, так и аналоговых форм сигнала. Когда речь идет о цифровых сигналах, мы имеем дело с логическими уровнями — высоким и низким — и можем модулировать несущую (с помощью AM или ЧМ) рядом импульсов, который представляет цифровое значение. Например, если для числа 37 передается код ДКД (двоично-кодированное десятичное число) 00110111, то для модуляции несущей просто должна использоваться указанная последовательность нулей и единиц. Каждый нуль может быть представлен уровнем 0В, а каждая единица — уровнем, например, 5В. Образованная в результате последовательность импульсов показана на рис. 7 вместе с совпадающим рядом синхронизирующих импульсов, необходимых для идентификации положения единиц и нулей. В указанной последовательности важен порядок импульсов. Сначала передается МЗДР (младший значащий десятичный разряд) 7, а затем СЗДР (старший значащий десятичный разряд) 3. В каждом десятичном разряде на первом месте старший двоичный разряд (бит).
Отметим, что, даже если все импульсы имеют полную амплитуду 5 В, обычно допускается изменение цифровых уровней в широком диапазоне напряжений, что не приводит к нарушению нормальной работы системы. Например, логический уровень «1» может изменяться в пределах от 2,4 до 5,5 В.
При использовании импульсных методов для передачи аналоговых сигналов необходимо сначала преобразовать аналоговые данные в импульсную форму. Это преобразование также относится к модуляции, так как аналоговые данные используются для модулирования (изменения) последовательности импульсов или импульсной поднесущей. На рис. 8,а показана модуляция синусоидальным сигналом амплитуд последовательности импульсов.

Рис. 8. Форма сигналов амплитудно-импульсной модуляции.
а—форма модулированного сигнала; б—воспроизведенная форма сигнала при низкой частоте следования импульсов, Т1 — период последовательности импульсов; в — воспроизведенная форма сигнала при высокой частоте следования импульсов, Т2 — период последовательности импульсов.
Амплитуда каждого импульса в модулированной последовательности зависит от мгновенного значения аналогового сигнала. Синусоидальный сигнал может быть восстановлен из последовательности модулированных импульсов путем простой фильтрации. На рис. 8,б графически показан процесс восстановления первоначального сигнала путем соединения вершин импульсов прямыми линиями. Однако восстановленная на рис. 8,б форма колебаний не является хорошим воспроизведением первоначального сигнала из-за того, что число импульсов на период аналогового сигнала невелико. При использовании большего числа импульсов, т. е. при большей частоте следования импульсов по сравнению с частотой модулирующего сигнала, может быть достигнуто более лучшее воспроизведение (рис. 8,в). Этот процесс амплитудно-импульсной модуляции (АИМ), относящийся к модуляции поднесущей последовательности импульсов, может быть выполнен путем выборки аналогового сигнала через постоянные интервалы времени импульсами выборки с фиксированной длительностью. Импульсы выборки — это импульсы, амплитуды которых равны величине первоначального аналогового сигнала в момент выборки. Частота выборки (число импульсов в секунду) должна быть по крайней мере в два раза большей, чем самая высокая частота аналогового сигнала. Для лучшей воспроизводимости частота выборки обычно устанавливается в 5 раз большей самой высокой частоты модуляции.
АИМ является только одним типом импульсной модуляции. Кроме него существуют:
ШИМ — широтно-импульсная модуляция (модуляция импульсов по длительности);
ЧИМ — частотно-импульсная модуляция;
КИМ — кодово-импульсная модуляция.
Широтно-импульсная модуляция преобразует уровни выборок. напряжений в серии импульсов, длительность которых прямо пропорциональна амплитуде напряжений выборок (рис. 9,а). Отметим, что амплитуда этих импульсов постоянна; в соответствии с модулирующим сигналом изменяется лишь длительность импульсов. Интервал выборки — интервал между импульсами — также фиксирован.
Частотно-импульсная модуляция преобразует уровни выборок напряжений в последовательность импульсов, мгновенная частота которых, или частота повторения, непосредственно связана с величиной напряжений выборок. И здесь амплитуда всех импульсов одинакова, изменяется только их частота. По существу все аналогично обычной частотной модуляции, лишь несущая имеет несинусоидальную форму, как в случае обычной ЧМ; она состоит из последовательности импульсов.
Кодово-импульсная модуляция преобразует выборки напряжения в кодированное сообщение. К примеру, дискретный уровень, равный 5,5 В, может быть представлен двоичным числом 101.101= 5,5 с помощью аналого-цифрового преобразователя. Кодовое сообщение 101.101 представляет собой некоторую выборку напряжения Vs . Подобным кодированием (в данном случае двоичным кодом) преобразуют каждую выборку. Последовательность таких кодовых сообщений представляет собой серию чисел, описывающих последовательные выборки. Код может быть любым: двоичным с шестью разрядами, как представленный выше, или двоичным кодом с N разрядами, или двоично-кодированным десятичным и т. д. (рис. 7).

Рис. 9. Широтно-импульсная модуляция.
Приведенные выше модуляционные схемы — лишь некоторые представители большого числа используемых методов. Подчеркнем, что рассмотренная здесь ИМ-модуляция относится к модуляции поднесущей, т. е. модуляции последовательности импульсов, которые затем используются в системах AM или ЧМ. Речь идет о двух следующих друг за другом модуляциях. Во-первых, информация модулирует последовательность импульсов. Здесь может быть использована АИМ, ШИМ, ЧИМ, КИМ или любой другой вид модуляции. Во-вторых, содержащая информацию поднесущая модулирует синусоидальную несущую.
Частотно-импульсная модуляция синусоидальной несущей приводит к Dwн -девиации частоты несущей скачкообразным отклонением от несущей. Например, частотная модуляция логических уровней «0» и «1» (0 В и 5В) дает две частоты — wн (для логического уровня «0») и wн +Dwн (для уровня «5»). По существу, мы просто сдвигаем частоту несущей от w к wн +Dwн для изображения логического уровня «1». Этот тип частотной модуляции называется также и частотной манипуляцией и обычно используется в передаче сигналов с помощью телеграфа и других цифровых устройств связи. Для восстановления логических уровней из частотно-манипулированной несущей может быть использована цепь фазовой автоподстройки (ФАП).
Методы импульсной модуляции очень широко распространены в приложениях телеметрии.
3. ПРАКТИЧЕСКОЕ ПРИМЕНЕНИЕ.
3.1. ТЕЛЕМЕТРИЯ.
Телеметрией называется проведение измерений на расстоянии и передача данных к месту их обработки и (или) хранения. Типичная телеметрическая система содержит, как показано на рис. 10, три основные части:
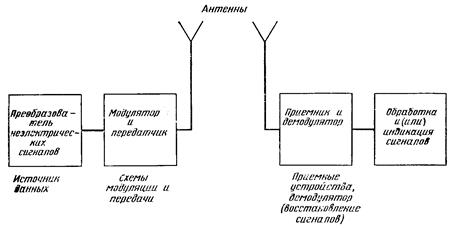
Рис. 10. Типичная телеметрическая система.
1) источник данных, который обычно является датчиком, преобразующим измеряемые параметры в электрические сигналы; 2) способ передачи данных; 3) приемное устройство и восстановление переданных данных. Содержание этого раздела будет сконцентрировано на различных методах передачи. Рассматривая методы телеметрии, будем сосредотачивать внимание на способах, обеспечивающих наиболее эффективное использование линии связи.
Что подразумевается под эффективным использованием линии связи, показывает следующий пример. Рассмотрим амплитудную модуляцию несущей с частотой 100 МГц (рис. 11). Предположим, что допустимая ширина полосы передачи составляет ±5 кГц. Информация, модулирующая несущую, имеет ширину полосы частот 1 кГц. Из того, что мы знаем об амплитудной модуляции, находим, что модулированная несущая будет иметь полосу 100 МГц ± 1 кГц. Это — полоса, необходимая для передачи данных с полосой 1 кГц. Ясно, что будет непроизводительно при полосе ±5 кГц занимать передаваемой информацией только полосу ±1 кГц. Теоретически в полосе ±5 кГц можно передать пятикратное число данных, содержащихся в полосе 1 кГц. Вообще говоря, на одной несущей 100 МГц мы могли бы передавать пять каналов данных с полосами по 1 кГц. Для такого увеличения эффективности передачи разработаны разные методы. Чаще всего используются методы частотного разделения (или частотного уплотнения каналов) и временного разделения (или временного уплотнения каналов).
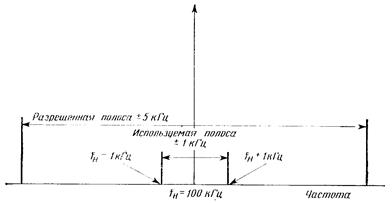
Рис. 11. Несущая 100 МГц с амплитудной модуляцией, wм =0±1 кГц, разрешенная полоса wр =±5 кГц.
3.1.1. Частотное разделение каналов (частотное уплотнение линии связи).
Типичная для телеметрии несущая частота 230 МГц может быть использована с полосой ±320 кГц (стандарты ВМФ н ВВС США). Это означает, что при использовании ее в амплитудной модуляции (AM) информация, которую можно передать без искажений, может иметь ширину полосы 320 кГц. Однако большинство приложений телеметрии оперирует сигналом с гораздо более узкой полосой. Для определенности положим, что ширина полосы частот сигнала составляет 4 кГц. Вместо непосредственной модуляции этим сигналом несущей 230 МГц можно сначала модулировать поднесущую с частотой, к примеру, 32 кГц. Модуляция поднесущей образует сигнал с частотой 32 ± 4 кГц (в случае AM). Промодулированной поднесущей можно теперь модулировать несущую 230 МГц. На рис. 12 показаны частотные полосы, использованные в такой передаче. Остальная часть полосы ±320 кГц не используется. Имеется возможность использовать и другую поднесущую, например 44 кГц, для другого источника данных с аналогичной полосой и получить модулированную поднесущую 44 ± 4 кГц (показанную штриховыми линиями на рис. 12). Очевидно, что можно заполнить разрешенную полосу частот ± 320 кГц большим числом поднесущих, переносящих информацию от большого числа источников. В этом примере полоса частот информации была произвольно ограничена значением 4 кГц. Можно отметить, что модулированные поднесущие отделяет неиспользованная полоса (здесь 4 кГц), 32 ± 4 кГц (полоса от 28 до 36 кГц) и 44 ± 4 кГц (от 40 до 48 кГц), т. е. имеется пустой интервал 4 кГц между высшей частотой нижней поднесущей (36 кГц) и низшей частотой верхней поднесущей (40 кГц). Это отделение необходимо, чтобы предотвратить взаимные помехи между каналами и позволить осуществить разделение поднесущих на приемном конце системы. Рассмотренный пример представляет собой АМ/АМ-телеметрическую систему, где как поднесущая, так и несущая являются амплитудно-модулированными.
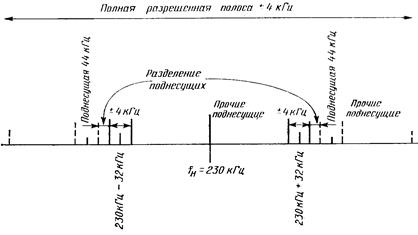
Рис. 12. Поднесущие: несущая частота 230МГц, полоса поднесущей ±4 кГц.
Уплотнения в два раза можно достигнуть благодаря использованию передачи на одной боковой полосе, т. е. передачи сигнала модулированной поднесущей, состоящего только из верхней полосы 32— 36 кГц или из нижней полосы 28—32 кГц. Всякий раз, когда это возможно, используется такая однополосная передача. На рис. 13 показан ряд частотных фильтров, которые требуются при разделении каналов с двумя боковыми полосами (рис. 12).
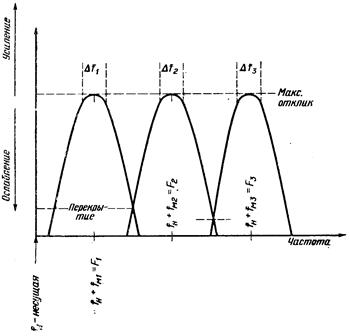
Рис. 13. Фильтрация при частотном разделении.
Здесь F1 , F2 и F3 — три поднесущие, a Df1 ,Df2 и Df3 — полосы частот этих поднесущих (в данном случае ±4 кГц = 8 кГц). Для обеспечения минимального взаимного влияния необходимо, чтобы точка пересечения амплитудно-частотных характеристик (АЧХ) фильтров была бы на 80 дБ ниже максимума. Необходимо подчеркнуть, что Df1 ,Df2 и Df3 не обязательно должны быть одинаковыми: их значения определяются характером информации. На рис. 14 приведена упрощенная функциональная схема трехканальной системы связи с частотным разделением.
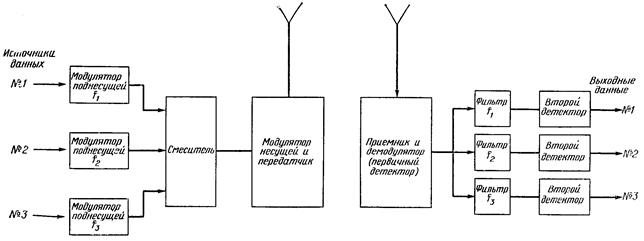 Рис. 14. Частотное разделение. Функциональная схема передатчика и приемника с тремя каналами.
Рис. 14. Частотное разделение. Функциональная схема передатчика и приемника с тремя каналами.
Каждый источник данных модулирует поднесущую определенной частоты. Источник № 1 связан с поднесущей частотой F1 и т. д. Все модулированные поднесущие затем объединяются смесителем для модуляции несущей и передаются к приемнику. Приемник воспроизводит исходный сигнал, который модулировал несущую, а именно набор поднесущих. Поднесущие разделяются набором частотных фильтров, каждый из которых создает полосу пропускания, согласующуюся с определенной поднесущей. Фильтр 1 пропускает полосу частот вокруг центральной частоты F1 поднесущей 1 и т. д. (рис. 13). Выходной сигнал каждого фильтра состоит из амплитудно-модулированной поднесущей, модулирующий сигнал которой соответствует определенному источнику данных. Отметим, что в схеме используются два детектора. Первый «детектирует» или воспроизводит модуляцию несущей, в то время как второй восстанавливает модуляцию поднесущей. Этого и следовало ожидать, так как система состоит из двух последовательных амплитудных модуляции (АМ/АМ). Таким образом, имеется система связи, в которой для каждого источника данных предназначен определенный диапазон частот. Для обеспечения приема на двойной полосе каждый фильтр должен обладать полосой пропускания для двух частотных диапазонов, соответствующих верхней и нижней боковой полосе. Обе боковые полосы определенного капала затем объединяются для образования выходного сигнала этого канала.
Система, рассмотренная выше, является АМ/АМ-системой. Другие схемы модуляции, такие, как AМ/ЧМ или ЧМ/ЧМ, часто используются в телеметрии.
Использование спектра радиочастот для телеметрии и других приложений регулируется различными правительственными учреждениями США. Комиссия по радиодиапазонам (IRIG) выпустила набор стандартов для телеметрии, пересмотренный в мае 1973 г. Обсудим некоторые из этих стандартов, имеющие отношение к ЧМ/ЧМ-системам телеметрии.
Для применений телеметрии предназначен 21 канал с центрами поднесущей, расположенными в пределах от 400 Гц до 165 кГц. Подробные сведения о всех несущих приведены в таблице на рис. 15.
| Канал |
Центральная частота, Гц |
Нижняя граница девиации, Гц |
Верхняя граница девиации, Гц |
Номинальная полоса частот, Гц |
Номинальное время нарастания, мс |
Максималь-ная полоса частот, Гц |
Минимальное время нарастания, мс |
| Каналы ±7,5 % |
|||||||
| 1 |
400 |
370 |
430 |
6 |
58 |
30 |
11,7 |
| 2 |
560 |
518 |
602 |
8 |
42 |
42 |
8,33 |
| 3 |
730 |
675 |
785 |
11 |
32 |
55 |
6,40 |
| 4 |
960 |
886 |
1032 |
14 |
42 |
72 |
4,86 |
| 5 |
1300 |
1202 |
1398 |
20 |
18 |
98 |
3,60 |
| 6 |
1700 |
1572 |
1828 |
25 |
14 |
128 |
2,74 |
| 7 |
2300 |
2127 |
2473 |
35 |
10 |
173 |
2,03 |
| 8 |
3000 |
2775 |
3225 |
45 |
7,8 |
225 |
1,56 |
| 9 |
3900 |
3607 |
4193 |
59 |
6,0 |
293 |
1,20 |
| 10 |
5400 |
4995 |
5805 |
81 |
4,3 |
405 |
0,864 |
| 11 |
7350 |
6799 |
7901 |
110 |
3,2 |
551 |
0,635 |
| 12 |
10500 |
9712 |
11288 |
160 |
2,2 |
788 |
0,444 |
| 13 |
14500 |
13412 |
15588 |
220 |
1,6 |
1088 |
0,322 |
| 14 |
22000 |
20350 |
23650 |
330 |
1,1 |
1650 |
0,212 |
| 15 |
30000 |
27750 |
32250 |
450 |
0,78 |
2250 |
0,156 |
| 16 |
40000 |
37000 |
43000 |
600 |
0,58 |
3000 |
0,117 |
| 17 |
52500 |
48562 |
56438 |
790 |
0,44 |
3938 |
0,089 |
| 18 |
70000 |
64750 |
75250 |
1050 |
0,33 |
5250 |
0,067 |
| 19 |
93000 |
86025 |
99975 |
1395 |
0,25 |
6975 |
0,050 |
| 20 |
124000 |
114700 |
133 300 |
1860 |
0,19 |
9300 |
0,038 |
| 21 |
165000 |
152624 |
177375 |
2475 |
0,14 |
12375 |
0,029 |
| Каналы ±15 % |
|||||||
| A |
22000 |
18700 |
25300 |
660 |
0,53 |
3300 |
0,106 |
| В |
30000 |
25500 |
34500 |
900 |
0,39 |
4500 |
0,078 |
| С |
40000 |
34000 |
46000 |
1200 |
0,29 |
6000 |
0,058 |
| D |
52500 |
44625 |
60375 |
1575 |
0,22 |
7875 |
0,044 |
| Е |
70000 |
59500 |
80500 |
2100 |
0,17 |
10500 |
0,033 |
| F |
93000 |
79050 |
106950 |
2790 |
0,13 |
13950 |
0,025 |
| G |
124000 |
105400 |
142600 |
3720 |
0,09 |
18600 |
0,018 |
| Н |
165000 |
140250 |
189750 |
4950 |
0,07 |
24750 |
0,014 |
Рис. 15. Каналы поднесущих с пропорциональной полосой частот. (Из JRIG, Telemetry Standards.)
Как отмечено, все они имеют девиацию частоты ±7,5%. Предполагая индекс модуляции равным 5, можно получить рекомендованную полосу частот информации. К примеру, 7,5% от 400 Гц канала 1 равны 30 Гц. Тогда полоса частот сигнала Df равна отношению девиации частоты к индексу модуляции, т.е. Df = 30/5 = 6 Гц. Максимум полосы частот, показанный в таблице на рис. 15, основан на значении индекса модуляции 1 (30 Гц в приведенном примере). Приведенное время нарастания T связано с шириной полосы Df как T=0,35/Df (где T - в мс, а Df - в кГц): таким образом, канал 1 имеет максимальную полосу частот 30 Гц и минимальное время нарастания T = 0,35/0,03 = 11,7 мс. Номинальное значение T основано на индексе модуляции 5. Очевидно, что если для определенных данных требуется более широкая полоса частот, то, предполагая при этом индекс модуляции неизменным, должна использоваться большая девиация частоты, например ±15%. Девиация частоты ±15% может быть использована в сочетании с последними восемью каналами, как это показано в таблице на рис. 15. Отметим, что не обязательно применять девиацию частоты ±15% на всех восьми каналах. Например, можно испсльзсвать канал А (вместо канала 14) с девиацией ±15%, а затем каналы с 16-го до 21-го с девиацией ±7,5% (исключив канал 15, примыкающий к каналу А) или вместо каналов 16 и 18 применить каналы С и Е с девиацией ± 15%, исключив смежные каналы 17, В, D и F.
Таблица, приведенная на рис. 15, базируется на индексах модуляции 1 (максимальная полоса) и 5 (поминальная полоса частот). При надежном приеме может быть использован индекс модуляции 1. Обычно условия связи требуют использования индекса модуляции 5. Ясно, что общая суммарная полоса всех поднесущих должна быть меньше полосы несущей. Ширина полосы несущей должна допускать разделение не только полос поднесущих, но и самих поднесущих. Обычно ширина полосы несущей для ЧМ/ЧМ-приложений составляет ±320 кГц в предназначенном для несущей диапазоне частот 225—260 МГц. Имеются другие диапазоны частот с различными полосами, которые определены IRIG в «Стандартах для телеметрии». Например, диапазон 1435—1535 МГц предназначен для использования правительственными и неправительственными организациями главным образом для телеметрии полетных испытаний (1435—1485 МГц для пилотируемых и 1485—1535 МГц для беспилотных летательных аппаратов). Диапазон 2000—2300 МГц предназначен для использования в других приложениях космических исследований, таких, как стартовые ускорители, исследовательские ракеты и ракеты военного назначения, космические двигатели. Стандарты IRIG полностью определяют характеристики несущих и поднесущих, включая стабильность частоты, передаваемую мощность и т.д.
Девиация частоты поднесущей, согласно стандарту, приведенному в таблице на рис. 15 (±7,5% или ±15%), пропорциональна центральной частоте, т. е. чем выше центральная частота, тем больше девиация частоты. Такая схема частотного уплотнения (или частотного разделения) каналов относится к схемам, имеющим пропорциональный формат полосы частот. Это означает, что только поднесущие высоких частот пригодны для передачи сигналов с широким спектром частот. Возможен другой формат — с постоянной полосой частот. Он предписывает постоянную девиацию частоты для подпесущих всех каналов. К примеру, канал 21 между частотами 16 и 176 кГц в этом случае может иметь максимальную девиацию частоты ±2 кГц (с центральными частотами 16, 24 кГц и т. д.), или ±4 кГц (32, 48, 64 кГц и т. д.), или ±8 кГц (32, 64, 96 кГц и т. д.). Полагая индекс модуляции равным 5, получим значения ширины спектра информации 400, 800 и 1600 Гц для соответствующих девиаций частоты: ±2, ±4, ±8кГц. Как только выбрана определенная девиация частоты, сразу фиксируется ширина спектра сигнала для всех поднесущих.
3.1.2. Временное разделение каналов (временное уплотнение линии связи)
Метод временного уплотнения используется в многоканальных линиях связи с временным разделением каналов. По таким линиям связи передаются импульсные сигналы, в то время как непрерывные сигналы типичны для линий связи с частотным разделением. При медленно изменяющихся телеметрических данных сигнал будет узкополосным (например, данные о температуре можно передавать с малой скоростью; скажем, один раз в 10 с), и крайне неэкономно занимать таким сигналом всю линию радиосвязи. Для увеличения эффективности передачи эту же линию связи можно использовать для передачи других измерений в паузах между передачей значений температуры. Ясно, что эффективное использование линии связи может быть достигнуто за счет временного разделения канала связи между несколькими измеряемыми параметрами, каждый из которых передается с частотой, соответствующей скорости его изменения. При таком временном разделении каждой измеряемой величине отводится свой повторяющийся временной интервал. В нашем примере в течение 10 с должно быть передано некоторое число разнообразных групп данных. Значения различных измеряемых величин. передаются одна за другой через одну и ту же линию связи, каждая величина в свои промежутки времени. Приемное устройство должно быть в состоянии разделить поток значений по каналам так, чтобы в каждом из каналов образовались последовательности значений, соответствующие первичной измеряемой величине. Для этого необходимо обеспечить временную синхронизацию или метить каждый временной промежуток для того, чтобы на приемном конце можно было распознать каждый источник данных. На рис. 16 показаны временное уплотнение каналов и функциональная схема типичной телеметрической системы с разделением каналов по времени.
Общим методом опознавания каждого временного промежутка является отсчет его положения по отношению к синхронизующим импульсам, которые имеются в начале цикла передаваемых значений данных, —«тактовые импульсы». На рис. 17,а показаны более подробные функциональные схемы коммутатора и декоммутатора.
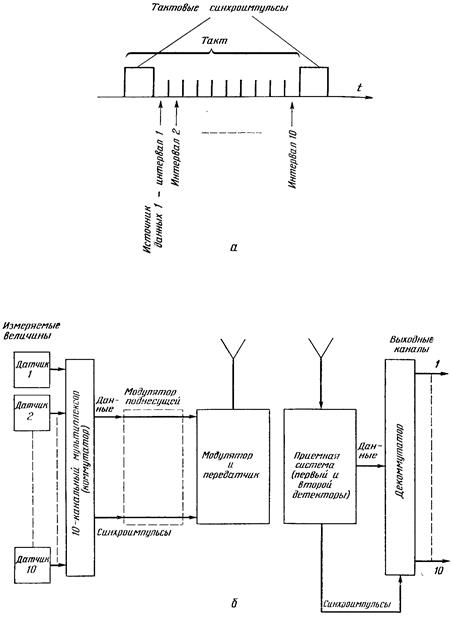
Рис. 16. Временное уплотнение линии с временным разделением каналов.
а-распределение временных интервалов (10 каналов); б-упрощенная функциональная схема системы.
Коммутатор собирает множество входных каналов от источников сигналов в одну линию передачи. Счетчик задает каждый временной промежуток и, следовательно, место в цикле для каждого источника данных. Например, пятый канал данных в приведенной схеме подключен к линии радиосвязи в то время, когда счетчик находится в положении 5, или при счете 5. На рис. 17,б показана упрощенная схема коммутации и декоммутации. Когда переключатель коммутатора находится в положении 1, в том же положении находится и переключатель декоммутатора, роль которого играет коммутатор, работающий в обратном направлении. Следовательно, данные первого канала передаются и принимаются.Оба переключателя работают синхронно.
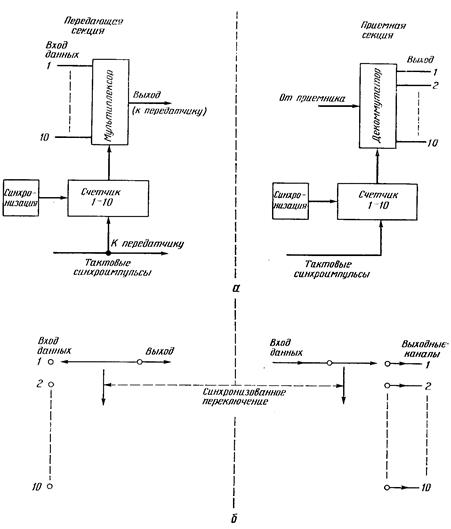
Рис. 17. Комутатор - декомутатор.
а - функциональная схема; б - схема взаимодействия. Синхронизирующий сигнал в приемном устройстве может быть извлечен из передаваемых по линии связи синхроимпульсов или образован местным генератором.
Тактовый синхроимпульс обеспечивает точную синхронизацию начала цикла, гарантирующего согласованные переключения коммутатора и декоммутатора. Отметим, что в коммутаторе и декоммутаторе используется одинаковая аппаратура; различие заключается лишь в направлении движения данных.
Так как коммутация и декоммутация управляются фиксированной частотной синхронизацией, частота переключений также стабильна и длительность каждого временного промежутка одинакова. Однако это может быть невыгодным в случаях, когда для различных источников данных требуются существенно разные полосы частот. Для того чтобы понять связь между полосой частот и частотой переключении, необходимо рассмотреть процесс выборки данных.
Как отмечалось ранее, синусоида может быть восстановлена из последовательности выборок ее мгновенных значений. Для воспроизведения синусоиды частоты 1 кГц с высокой верностью (искажения менее 1%) требуется по меньшей мере 5 выборок из каждого периода сигнала. Следовательно, сигнал с частотой 1 кГц должен быть подвергнут дискретизации со скоростью 5000 значений в секунду, т. е. 5 выборок на период измеряемой величины. Если мы предполагаем коммутировать сигналы от 10 источников данных (имеющих полосы частот по 1 кГц), для каждого из которых требуется скорость дискретизации 5000 выборок в секунду, то необходима скорость коммутации 10×5000 выборка/с = 50000 выборка/с. Коммутатор должен переключаться от источника к источнику с частотой 50 кГц (через 20 мс), так что каждый источник сигналов будет опрошен один раз за каждые 10 переключений, т. е. один раз каждые 20 мс, но с частотой 5 кГц. Частота тактов, т. е. число тактов в секунду, будет равна 5000 такт/с. Частота переключений равна тактовой частоте, умноженной на число источников данных в системе, или тактовой частоте, умноженной на число импульсов в такте (5000×10=50000 имп./с). Линия связи должна быть в состоянии передавать импульсные данные с такой высокой частотой (50000 имп./с) без ощутимых искажений. Это означает, что необходима система связи. с шириной полосы пропускания гораздо больше 50000 Гц.
Выборки данных от различных источников в системе, показанной на рис. 16,б, непосредственно модулируют несущую. Наряду с такой непосредственной модуляцией часто бывает, что выборки данных используются для модуляции поднесущей, которая в свою ечередь модулирует несущую, как это показано штриховыми линиями на рис. 16,б. Выборки данных от группы источников передаются, таким образом, на одной из поднесущих в системе с частотным уплотнением каналов. Это позволяет применять оба метода уплотнения каналов в одной линии связи. Сами по себе выборки данных это не что иное, как импульсные значения сигнала при амплитудно-импульсной модуляции (АИМ), т.е. информация является амплитудно-нмпульсно-модулированной. Так как такие АИМ-сигналы модулируют поднесущую (например, путем ЧМ), которая затем модулирует несущую (к примеру, также путем ЧМ), то в результате получается АИМ/ЧМ/ЧМ-система.
Теперь рассмотрим пример, демонстрирующий влияние дискретизации сигнала на ширину полосы частот системы связи.
Рассмотрим несущую с частотой 100 МГц, которая модулируется (ЧМ) поднесущей с центральной частотой 70 кГц. Информация переносится с помощью частотной модуляции поднесущей 70 кГц. Таким образом, имеем ЧМ/ЧМ-канал связи. Чтобы соответствовать стандартам, необходимо ограничить девиацию частоты поднесущей до ±15%. Это означает, что при индексе модуляции 5 ширина полосы информации ограничена до 2100 Гц, т. е. получается гораздо уже полосы 50000 Гц, необходимой для предложенной системы с уплотнением каналов. Если число выборок в такте было бы сокращено до одной, что означает оставление одного из источников данных, то потребовалась бы частота переключений 5 кГц, т. е. по-прежнему шире полосы 2100 Гц, которой располагает поднесущая 70 кГц. Отметим, что в случае одного источника данных не требуется никакого уплотнения каналов и, следовательно, возможна прямая непрерывная передача (без выборки). В этом случае ширина полосы 2100 Гц в два раза больше полосы, необходимой для сигнала от одного источника (1 кГц в предыдущем примере). Такое ухудшение эффективности использования полосы частот (при дискретизации требуется полоса 5 кГц, без дискретизации — только 1 кГц) обусловлено свойствами самой дискретизации сигнала. При формировании пяти выборок мгновенных значений сигнала на каждый период непрерывного сигнала мы расширяем полосу частот сигнала более чем в пять раз, а следовательно, и требуемую полосу канала. Хотя при использовании одной поднесущей для передачи сигналов от большого числа источников полоса частот используется неэффективно, но это имеет и свои достоинства, проявляющиеся при узкополосных сигналах от источников. Поэтому временное разделение, требующее дискретизации сигнала, в основном используется в приложениях с низкими требованиями к полосе частот. Однако широкополосные сигналы тоже .могут быть переданы с использованием длительных выборок. Длительность каждой выборки в таком методе гораздо больше, чем период ннформации, и составляет 5 и более ее периодов. Это просто означает, что выборка содержит не одно мгновенное значение, а конечный отрезок значений сигнала, передаваемый в данный тактовый интервал времени. При таком методе необходимо быть уверенным в отсутствии потерь данных за время перерыва передачи ниформацин от определенного источника.
Выше предполагалось, что способом передачи является ЧМ/ЧМ. Следовательно, в каждый отдельный интервал времени изменяющаяся частота поднесущей представляет собой значение измеряемой величины, подвергнувшейся выборке в это время. В течение этого интервала времени отклонение частоты от центра поднесущей соответствует напряжению выборки, которое модулирует частоту поднесущей. Ширина этих временных интервалов фиксирована, а такт их последовательности задается синхроимпульсом. Синхроимпульс вызывает максимальное отклонение частоты и имеет длительность, равную удвоенному обычному временному промежутку. Уширение необходимо для выделения импульса синхронизации из импульсов выборок сигналов.
Установление стандартов и контроль характеристик линий передачи осуществляются различными государственными или международными органами (в зависимости от характера линий: спутниковая телеметрия — международными соглашениями, промышленная телеметрия — органами государственного контроля и т.д.). Например, тактовая частота должна поддерживаться постоянной с точностью ±5% (долговременная стабильность); длина такта ограничена не более 128 временными интервалами и т.д. (IRIG , «Стандарты телеметрии»). Отметим еще, что при высоких частотах поднесущих полоса часто оказывается шире; значит, частота переключении может быть выше.
Для повышения эффективности иногда полезно иметь неодинаковую частоту выборки для разных источников.
Источник широкополосной информации должен опрашиваться чаще, чем узкополосный. Это легко достигается простыми изменениями во внутренних соединениях коммутатора и декоммутатора. Например, если мы соединим положения 1 и 5 в десятиточечном коммутаторе (уплотнителе каналов), то источник данных, соединенный с положениями 1 и 5, будет опрошен дважды за один такт, т. е. с удвоенной частотой. Возможно также произвести подкоммутацию, т.е. выделить один или более временных интервалов, длительность которых разбивается на части для передачи данных от дополнительного ряда источников. Длительность интервала основного такта становится при этом подтактом для подкоммутатора.
Эти методы позволяют легко приспособить систему к широкому диапазону требований к полосе частот.
3.1.3. Телеметрический комплекс.
До cиx пор описывались разные отдельные средства телеметрии. Рассмотрим телеметрическую систему, в которой использованы все эти различные средства. Это не означает, что такая сложная система является типичной для телеметрии, однако ее рассмотрение позволит связать между собой различные технические средства.
На рис. 18,а и 18,б показаны передающее и приемное телеметрические устройства. Система, как видно, состоит из набора различных блоков и обслуживает 39 каналов информации. Показанные на рис. 18,а 18 поднесущих обеспечивают непрерывную передачу информации. Подпесущая 19 (93 кГц) используется в сочетании с коммутатором и подкоммутатором. Она имеет относительно большую ширину полосы — 1395 Гц (номинальное значение) и сравнительно хорошее время нарастания — 0,25 мс. Это означает, что коммутируемые входные данные не должны состоять из сигналов с временем нарастания короче чем 0,25 мс. Действительно, существующие стандарты требуют, чтобы интервал дискретизации был не менее номинального времени нарастания (здесь 0,25 мкс). Можно положить частоту дискретизации равной 1 кГц, т. е. 1 выборка/с, или 20 мс на один такт. Это позволяет установить скорость коммутации — 4 шага в 1 мс, или 0,25 мс на импульс выборки (для входных каналов с 35-го до 38-го). Отметим, что канал 17 соединен с коммутатором в двух точках и, следовательно, опрашивается дважды за такт. Входными данными для канала 17 могут быть сигналы, имеющие интервал дискретизации 10 мс, в то время как прочие каналы опрашиваются только один раз в каждые 20 мс. Четыре подкоммутированных канала входных данных опрашиваются за 0,25 мс (каждый импульс выборки может длиться 0,25 мс) один раз в каждые 20 мс аналогично остальным коммутируемым каналам. Как показано на схеме, поднесущая С содержит частотно-манипулированный сигнал (ЧМС) с частотой 4 кГц. Этот сигнал может синхронизировать и контролировать работу коммутатора (1 кГц образуется делением частоты 4 кГц) и декоммутирующей секции, обеспечивая точную синхронизацию между коммутатором и декоммутатором (это не существенно, так как обычно синхронизацию обеспечивает синхроимпульс в тактовом интервале). Необходимо отметить, что в целях простоты 20 коммутируемых входных каналов в примере заполняют весь интервал 20 мс и не оставляют места для синхроимпульса.
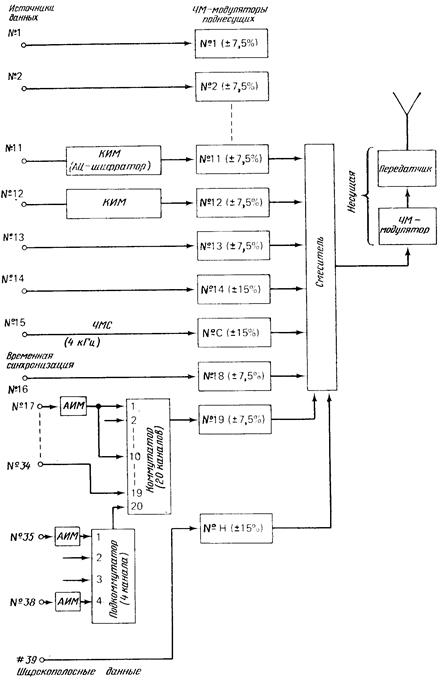
Рис. 18,а. Передающая телеметрическая система.
Каналы 1—11 содержат узкополосную информацию. Канал 12 содержит КИМ-сигнал, полученный путем преобразования в цифровой дискретный код аналогового сигнала (аналого-цифровое преобразование). Целесообразно использовать синхронизирующие импульсы 4 кГц канала С (с соответствующим делением по частоте) для синхронизации КИМ-информации обоих каналов 12 и 13. Цифровые данные в канале 13 имеют форму КИМ, все другие каналы несут в себе непрерывную информацию. Наиболее широкополосные сигналы могут быть переданы по каналу Н.
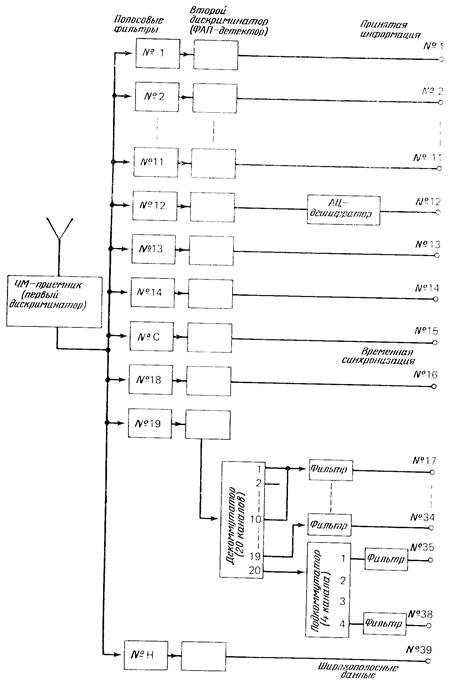
Рис. 18,б. Приемная телеметрическая система; следующие за коммутатором фильтры необходимы для воспроизведения аналоговых данных из АИМ-выборок.
На рис. 18,б представлено приемное устройство, соответствующее передающему устройству, изображенному на рис. 18,а.
Различные части телеметрических систем производятся в виде отдельных функциональных блоков. К примеру, можно приобрести блоки коммутатора, декоммутатора и подкоммутатора, ФАП-детектор и ЧМ/АМ-приемиики с полным набором фильтров и частотных дискриминаторов. Компетентное конструирование систем телеметрии сводится в большей степени к тщательному подбору подходящих подсистем.
3.1.4. Проблемы телеметрии.
Как и в каждой системе, одной из основных проблем в системах телеметрии является проблема точности. Мы судим о качестве системы в большей степени по тому, насколько она точна для различных входных сигналов. Таким образом, необходимо рассмотреть точность воспроизведения телеметрической системой сигналов с различной шириной полосы, т. е. необходимо рассмотреть частотную пропускную способность системы. Вероятно, основными причинами ухудшения точности являются шум и взаимное влияние каналов. Улучшить шумовые характеристики линии связи можно путем повышения уровня передаваемой мощности. Следовательно, необходимо рассмотреть различные узлы телеметрической системы с точки зрения повышения уровня передаваемой мощности.
Атмосферные шумы вводятся в электромагнитную волну (передаваемый сигнал) обычно путем амплитудной модуляции, т. е. шумовой сигнал вызывает изменение амплитуды полезного сигнала. Это означает, что АМ-радиосвязь наиболее чувствительна к атмосферным помехам. Сигнал ЧМ переносит информацию, заключенную в изменениях частоты, а не амплитуды; следовательно, изменения амплитуды могут быть исключены в приемнике с помощью «ограничителя». Ограничитель рассчитан на выравнивание амплитуды ЧМ-сигнала. Он сохраняет постоянной амплитуду ЧМ-сигнала и уменьшает все АМ-компоненты. Метод ЧМ применяется обычно при больших значениях несущей частоты (100 МГц и выше) и располагает гораздо большей полосой частот, чем метод AM. Применение несущей высокой частоты делает ЧМ-системы более компактными и эффективными. Повышение частоты несущей благоприятствует и распространению электромагнитных волн, что еще более улучшает шумовые характеристики ЧМ. Так как большинство систем телеметрии предусматривает работу на поднесущих, необходимо рассмотреть помехи и шумы, связанные с уплотнением линии связи введением поднесущих.
Поскольку для передачи информации от многочисленных источников используется только одна несущая, то между поднесущими можно ожидать взаимодействия. Межканальное взаимодействие может возникнуть по двум основным причинам. Во-первых, если межканальное расстояние (интервал частот между поднесущими) слишком мало и часть информации одного канала может попадать в смежный канал. Конечно, взаимодействие подобного типа может быть вызвано и плохими фильтрами поднесущих в приемном устройстве. Во-вторых, может существовать «взаимная модуляция», при которой одна поднесущая вызывает амплитудную модуляцию другой поднесущеп. Это может иметь место, только если существуют нелинейности в звеньях блоков, вырабатывающих составной многоканальный сигнал. Напомним, что амплитудная модуляция двух синусоидальных колебаний (например, звукового сигнала и несущей радиовещания) приводит к суммарной и разностным частотам. Таким образом, может возникнуть множество новых нежелательных частот; некоторые из них, конечно, могут попасть в полосы различных поднесущих, вводя шумы (нежелательные сигналы) в эти каналы. Взаимная модуляция может быть сведена к минимуму путем сохранения хорошей линейности усиления в соответствующих звеньях системы.
Необходимо отметить, что межканальное влияние может порождаться самой коммутацией каналов. Большей частью это является следствием «звона» или медленной скорости спада напряжения при переключениях, что может вызвать просачивание в коммутаторе сигнала из одного промежутка времени в другой и ухудшение точности.
По отношению к методам импульсной модуляции проблемы шума приобретают несколько иное значение. В импульсных методах, где амплитуда импульсов фиксирована (КИМ, ШИМ, ЧИМ), шумы должны иметь тот же порядок, что и импульсы сигнала, чтобы оказывать какое-либо влияние. Ошибки в КИМ могут быть вызваны лишь введением ложного или пропуском полезного импульса. Например, двоично-десятичное число 0001 = 1 может превратиться в 1001 = 9 под воздействием ложного импульса. Величина ошибки может быть огромной, однако для возникновения такой ошибки необходим существенный шумовой сигнал. На практике метод КИМ в высокой степени невосприимчив к шумам; то же относится и к методам ШИМ и ЧИМ. Амплитудно-импульсная модуляция, где представляющим информацию параметром является амплитуда сигнала, гораздо более чувствительна к влиянию шумов.
3.1.5. Аппаратура телеметрии и ее приложения.
На рис. 19 представлена функциональная схема блока телеметрического устройства, использующего КИМ. Представленная подсистема содержит только входную секцию и узел обработки импульсов. Это позволяет осуществить модульную конструкцию телеметрических систем с различным числом (таким, какое потребуется для данного приложения) одинаковых блоков, подключаемых к линии связи. Важно отметить, что блок, подобный рассматриваемому, может быть использован не только для беспроводной связи. Цифровые данные с использованием частотной манипуляции могут быть направлены в телефонную линию, рассчитанную на передачу звуковых сигналов, т. е. информации с полосой около 3000 Гц.
На рис. 19 показаны формирователи сигналов, предназначенные для усиления и формирования сигналов преобразователя (датчика). Формирователь сигналов обычно необходим, так как большинство сигналов от датчиков имеет величину порядка милливольт. Узел обработки аналоговой информации включает в себя аналоговый уплотнитель с подуплотнителем или подкоммутатором, схему выборки с удержанием и аналого-цифровой преобразователь.
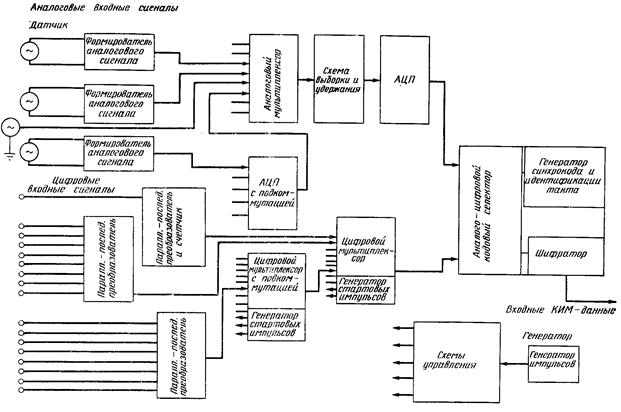 Рис. 19. Функциональная схема типичной телеметрической КИМ-системы.
Рис. 19. Функциональная схема типичной телеметрической КИМ-системы.
Цифровая информация вводится через параллельно-последовательный преобразователь, так как большинство цифровых данных приходит параллельно, а затем через цифровой уплотнитель каналов. Это означает, что ряд источников аналоговых и цифровых данных коммутируются и группируются для образования последовательности КИМ-значений. Аналого-цифровой кодовый селектор (на первой части диаграммы) управляет последовательностью коммутации данных и вводит сигнал в шифратор, который предназначен образовывать подходящие уровни и коды, пригодные для радиолинии или проволочной передачи. (Эта подсистема может быть использована вместе с одной лишь поднесущей.) На рисунке показан генератор синхрокода и идентификации такта. Синхрокод обеспечивает тактовую синхронизацию. Для метода КИМ обычным является использование полной кодовой группы с особым кодом, которая встречается лишь один раз за такт (в течение интервала синхроимпульса). Эта синхронизирующая кодовая группа выполняет функции тактового синхроимпульса. Временной контроль подсистем обеспечивается точным импульсным генератором с набором делителей частоты и различных логических схем контроля. Рассматриваемая подсистема способна обрабатывать кодовые группы от 1 до 16 бит и такты длиной от 1 до 32 кодовых групп; число подтактов может быть от 2 до 32. Скорость, с которой работают различные узлы схемы (т. е. частота бит, частота тактов), контролируется основным блоком контроля; предусмотрен широкий диапазон этих частот.
В настоящее время в большом количестве производится особый класс телеметрической аппаратуры — «модем». Модем ( от слов модуляция и демодуляция) управляет модуляцией и демодуляцией сигналов телеметрии. Цифровые модемы возникли в связи с широким распространением цифровой техники. Они манипулируют только цифровыми данными аналогично подсистеме, изображенной на рис. 19. Применяемый способ модуляции и демодуляции меняется от модуля к модулю. При чрезмерной скорости следования последовательных кодовых групп цифровых данных модем преобразует их в несколько параллельных замедленных строк, которые используются в системе с уплотнением каналов по частоте. Например, скорость 1200 бит/с получена с помощью 16-канального частотного уплотнения телефонной линии с полосой 375—3025 Гц. Каждый из 16 каналов переносит частотно-манипулированные данные со скоростью 75 бит/с для передачи со скоростью 75×16 = 1200 бит/с. Каналы отстоят друг от друга на 170 Гц, начиная с 425 Гц и кончая 2975 Гц. Частотно-манипулированный сигнал состоит из сдвига тона на 85 Гц, сосредоточенного около определенной частоты канала fн . Фактически образуются три различимых уровня: fн + 42,5 Гц, fн - 42,5 Гц и fн . Последний уровень не несет информации. Следовательно, как импульс, так и пауза (или логические «1» и «0») обособлены и отделены от частоты канала.
Фильтры приемного устройства демодулируют 16 частотно-ма-нипулированных каналов и объединяют их для образования первоначальной последовательной кодовой группы.
Некоторые модемы вместо частотной манипуляции используют фазовую манипуляцию. Этот метод сдвигает фазу тона в телефонном канале с частотным уплотнением по отношению к опорному сигналу. Обычно фазовые сдвиги на 45, 135, 225 и 315° представляют 2 бита (две логические группы «0» и «1»). Фазовый сдвиг затем измеряется или детектируется в приемном устройстве, и вырабатывается соответствующий логический уровень.
Рассмотренные выше модемы используют узкополосный канал передачи, однако использованные методы пригодны и для широкополосной передачи. Большим преимуществом широкополосной передачи являются очень высокие частоты следования данных, которые могут быть получены, благодаря чему исключается необходимость последовательно-параллельного преобразования данных. Такие широкополосные системы обычно работают на линиях СВЧ, где шумовые эффекты менее вредны. Например, полоса 48 кГц допускает полную скорость передачи информации 48 кбит/с. Теоретически возможны и скорости до 3,8 Мбит/с.
3.1.6.Другие системы связи.
Наиболее общими системами связи являются радиовещание и телевидение. Федеральной комиссией по связи (ФКС) для радиовещания отведены две области частот. Коммерческое радиовещание использует для АМ-передач частоты 535—1605 кГц с полосой 10 кГц на один канал. Для частотной модуляции используется диапазон 88—108 МГц с шириной полосы канала 200 кГц: всего 100 каналов, начиная с номера 201 (88,1 МГц) по номер 300 (107,9 МГц). Коммерческое ЧМ-радиовещание в противоположность другим ЧМ-передачам ограничено каналами 221—300. Коммерческое телевидение располагает 82 каналами (от номера 1 до 83) в диапазоне частот 44—890 МГц. Распределение ТВ-каналов приводится в таблице на рис. 20.
| Ка-нал |
Полоса частот, МГц |
Ка-нал |
Полоса частот, МГц |
Ка-нал |
Полоса частот, МГц |
Ка-нал |
Полоса частот, МГц |
| 1 |
44-50 |
22 |
518-524 |
43 |
644-650 |
64 |
770-776 |
| 2 |
54-60 |
23 |
524-530 |
44 |
650-656 |
65 |
776-782 |
| 3 |
60-66 |
24 |
530-536 |
45 |
656-662 |
66 |
782-788 |
| 4 |
66-72 |
25 |
536-542 |
46 |
662-668 |
67 |
788-794 |
| 5 |
76-82 |
26 |
542-548 |
47 |
668-674 |
68 |
794-800 |
| 6 |
82-88 |
27 |
548-554 |
48 |
674-680 |
69 |
800-806 |
| 7 |
174-180 |
28 |
554-560 |
49 |
680-686 |
70 |
806-812 |
| 8 |
180-186 |
29 |
560-566 |
50 |
686-692 |
71 |
812-818 |
| 9 |
186-192 |
30 |
566-572 |
51 |
692-698 |
72 |
818-824 |
| 10 |
192-198 |
31 |
572-578 |
52 |
698-704 |
73 |
824-830 |
| 11 |
198-204 |
32 |
578-584 |
53 |
704-710 |
74 |
830-836 |
| 12 |
204-210 |
33 |
584-590 |
54 |
710-716 |
75 |
836-842 |
| 13 |
210-216 |
34 |
590-596 |
55 |
716-722 |
76 |
842-848 |
| 14 |
470-476 |
35 |
596-602 |
56 |
722-728 |
77 |
848-854 |
| 15 |
476-482 |
36 |
602-608 |
57 |
728-734 |
78 |
854-860 |
| 16 |
482-488 |
37 |
608-614 |
58 |
734-740 |
79 |
860-866 |
| 17 |
488-494 |
38 |
614-620 |
59 |
740-746 |
80 |
866-872 |
| 18 |
494-500 |
39 |
620-626 |
60 |
746-752 |
81 |
872-878 |
| 19 |
500-506 |
40 |
626-632 |
61 |
752-758 |
82 |
878-884 |
| 20 |
506-512 |
41 |
632-638 |
62 |
758-764 |
83 |
884-890 |
| 21 |
512-518 |
42 |
638-644 |
63 |
764-770 |
Рис. 20. Распределение ТВ-каналов.
Ширина полосы телевизионного канала составляет 6 МГц. Максимальная девиация частоты для коммерческого ЧМ-вещания равна ±75 кГц. Это означает, что индекс модуляции для модулированного сигнала на частоте 15 кГц равен 5 (15 кГц — верхняя граница звуковых частот). Индекс модуляции 5 дает 7 пар боковых полос значительной амплитуды или общую полосу 7×2×15 = 210 кГц. Таким образом, предназначенная для одного канала полоса 200 кГц почти достаточна для полной передачи звукового сигнала 15 кГц. Полоса 10 кГц АМ-передач (фактическая полоса по уровню —3 дБ составляет около 9 кГц) допускает максимум звуковой частоты 5 кГц. Как видно, ЧМ-передача обеспечивает гораздо более широкую полосу и, следовательно, более полное воспроизведение звукового диапазона в целом (20 Гц —15 кГц). Для сравнения будет показано ниже, что звуковое ТВ-сопровождение обеспечивается максимальной девиацией ±25 кГц, что приводит к коэффициенту модуляции 25/15 = 1,67 (для звуковой частоты 15 кГц). Это в свою очередь приводит к трем парам боковых полос со значительной амплитудой и к необходимой полосе частот 2×3×15 = 90 кГц. Фактическая передаваемая полоса составляет от 50 до 80 кГц и недостаточна для полного воспроизведения звукового диапазона в целом.
AM- и ЧМ-радиовещанне следует стандартным методам. Функциональные схемы AM- и ЧМ-систем представлены на рис. 21 и 22.
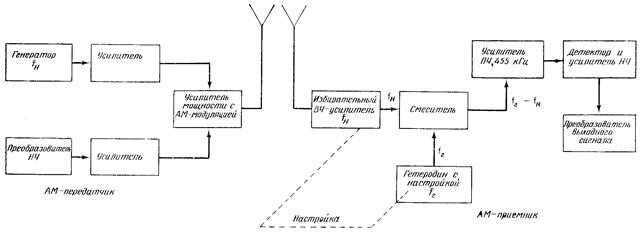 Рис. 21. Функциональная схема системы амплитудной модуляции.
Рис. 21. Функциональная схема системы амплитудной модуляции.
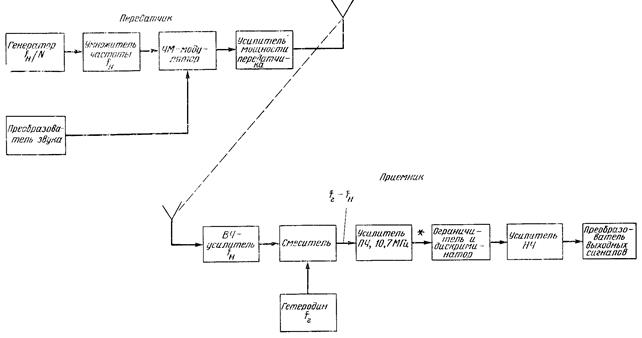 Рис. 22. Функциональная схема системы частотной модуляции.
Рис. 22. Функциональная схема системы частотной модуляции.
Оба приемника для получения промежуточной частоты (ПЧ) используют методы смешения частот. Основное преимущество метода преобразования частоты в промежуточную основано на том, что промежуточная частота фиксирована и, следовательно, удобна для усиления в резонансных усилителях с фиксированной частотой настройки. Используемая в АМ-приемниках промежуточная частота 455 кГц является частотой биений (разностной частотой) между колебаниями от местного генератора-гетеродина fг и входным сигналом fн . Таким образом, ПЧ = fг - fн . При изменении настройки изменяются как fг , так и fн , но их разность остается неизменной. ЧМ-приемники имеют промежуточную частоту 10,7 МГц. АМ-детектор состоит из простого выпрямителя и высокочастотного фильтра, который воспроизводит огибающую модулированного сигнала. ЧМ-дискриминатор воспроизводит звуковой сигнал путем преобразования девиации частоты fн в соответствующее напряжение. Для частотной дискриминации разработано большое число схем. Заслуживает внимания тот факт, что ЧМ-детектору предшествует ограничитель уровня. Амплитуда сигнала поддерживается на постоянном уровне; это уменьшает помехи, которые обычно свойственны амплитудной модуляции.
Телевизионная передача несколько более сложна, так как она использует методы и амплитудной, и частотной модуляций.
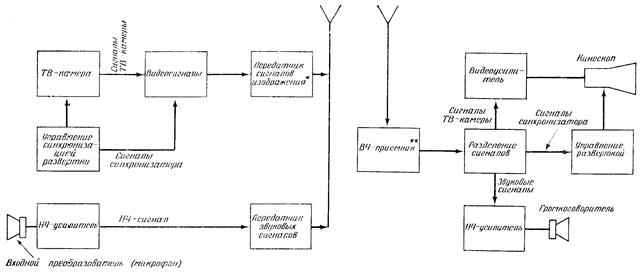 Рис. 23. Функциональная схема ТВ-линии связи.
Рис. 23. Функциональная схема ТВ-линии связи.
ТВ-линия связи содержит три основные группы информации. Во-первых, ТВ-камерой генерируется сигнал изображения, соответствующий форме и яркости образа. Телекамера развертывающая изображение по горизонтали и вертикали, управляется схемами развертки и синхронизации. Для обеспечения синхронизации развертки изображения на экране кинескопа приемника с разверткой камеры на приемник передаются синхроимпульсы. Строка за строкой на экране сформируется изображение в строгом соответствии с построчным сканированием образа передающей камерой. Наконец, для воспроизведения звукового сопровождения паредаваемой сцены необходимы сигналы звуковой частоты. Видеосигнал (сигнал изображения) н синхроимпульсы модулируют по амплитуде высокочастотную несущую, в то время как сигналы звуковой частоты передаются с помощью частотной модуляции. Для передачи обоих сигналов (ЧМ и AM) используется полоса частот 5 МГц ТВ-канала.
Для того чтобы получить высококачественное изображение, необходимо разрешение телекамеры порядка 0,0025 см. Это означает, что каждый участок экрана телекамеры размером 0,0025 см образует свой локальный яркостный сигнал. Реальный образ фокусируется на экран телекамеры, покрытый большим числом миниатюрных (фотоэлементов (размером 0,0025 см), которые и вырабатывают фото-э. д. с. в соответствии с интенсивностью падающего на них света. Эти напряжения снимаются последовательно, образуя непрерывный поток сигналов, в котором каждый уровень сигнала соответствует свету, падающему на соответствующий фотоэлемент. Совокупный сигнал является видеосигналом (сигналом изображения). Выборка производится от точки к точке слева направо. Каждая горизонтальная линия развертки (около 4000 фотоэлементов) образует строчку видеозначений, которые используются в приемном устройстве для воспроизведения яркостных изменений изображения. 525 таких линий полностью покрывают экран телекамеры и,таким образом, содержат видеосигнал, соответствующий реальному образу. Синхронизирующие импульсы поддерживают временную зависимость между разверткой телекамеры и разверткой приемной ЭЛТ (кинескопа), так что положение объектов в реальной картине сохраняется и на экране кинескопа.
Как отмечалось ранее, посредством амплитудной модуляции или, точнее, на частично подавленной боковой полосе частот передается видеосигнал, содержащий также и синхронизирующие импульсы. Как показано на рис. 24, полоса 6 МГц (по уровню — 20 дБ) телевизионного канала содержит 4,2 МГц верхней боковой полосы частот и 0,75 МГц нижней полосы.
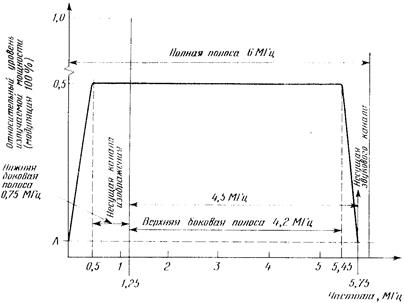
Рис. 24. Распределение частот в пределах полосы стандартного телевизионного канала.
Это означает, что основная часть сигналов изображения передается на одной боковой полосе. Низкочастотные видеосигналы (менее 0,75 МГц) передаются с двумя боковыми полосами, в то время как высшие видеочастоты передаются с одной боковой полосой (полностью передается только верхняя боковая полоса). Как показано на рисунке, ЧМ-несущая (несущая звука) расположена на 4,5 МГц выше несущей канала изображения. Телевизионный приемник разделяет эти две несущие для выработки видеосигнала в одном канале и звукового сигнала в другом. Видеосигнал в свою очередь разделяется, образуя синхронизирующие импульсы и сигналы изображения. Последние модулируют по инсивности электронныи пучок кинескопа, воспроизводя передаваемое изображение.
На рис. 25 приведена более детальная (функциональная схема ТВ-приемника. Как показано на схеме, несущая звука снимается либо с блоков НЧ-канала изображения на уровне УВЧ (fн =15 МГц), либо с видеоусилителя на частоте 4,5 МГц путем фильтрации в видеодетекторе. Затем два типа сигналов (звуковые и видео) обрабатываются раздельно для образования выходных сигналов звука и изображения.
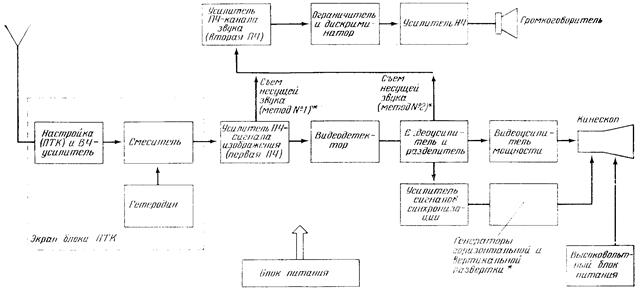 Рис. 25. Блок-схема ТВ-приемника с черно-белым изображением.
Рис. 25. Блок-схема ТВ-приемника с черно-белым изображением.
4. ЗАКЛЮЧЕНИЕ.
Электрическая связь - это огромный комплекс передачи, приема и обработки информации, построение которого в немалой степени обязано достижениям радиотехники, зародившейся как самостоятельная и техническая дисциплина.
Отличительная особенность нашего времени - непрерывно возрастающая потребность в передаче потоков информации на большие расстояния. Это обусловлено многими причинами, и в первую очередь тем, что электрическая связь стала одним из самых мощных рычагов управления.
Претерпевая значительные изменения, становясь многосторонней и всеобъемлющей, электрическая связь становится все более интегрированной в мировое телекоммуникационное пространство.
5. СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ.
1) Г. Зангер. «Электронные системы» 1980 г.
2) В. В. Мигулин «100 лет радио» 1995 г.
3) А. С. Касаткин «Электротехника» 1965 г.
4) В. Г. Герасимов «Основы промышленной электроники» 1986 г.