| Скачать .docx |
Реферат: Габаритный и электрический расчет многослойного ПП. Схема замещения
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ НФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра ЭТТ
РЕФЕРАТ
На тему:
«Габаритный и электрический расчет многослойного ПП . Схема замещения»
МИНСК, 2008
Исходные данные : Pa , вид колебаний, fo , марка пьезоэлектрического материала (ПЭМ) и его физические характеристики. Основными параметрами ПЭМ являются пьезомодули dij (Кл/м), диэлектрические проницаемости εij , модули упругости Eij , скорость звука C, tgδ, механическая добротность θm . Параметры ПП зависят от формы.
Расчет делится на две части:
1. Габаритный расчет.
2. Электрический расчет.
Габаритный расчет

Рисунок 1 – Преобразователь многослойный.
1. Выбираем размеры активного элемента
 , (1)
, (1)
где ηэа – ожидаемый электродинамический КПД преобразователя,
l2 – выбирается из справочника или условия механической прочности.
2. Для обеспечения стабильной работы преобразователя рабочую накладку рекомендуется выбирать из материала с малым волновым сопротивлением и высокой добротностью. Например, из сплава D16 (ρ ≈ 7,8 г/см3 ; C ≈ 5,2∙103 м/c).
3. Продольные размеры элементов многослойного преобразователя определяются из условия продольного резонанса
 , (2)
, (2)
где φi – сдвиг фаз на каждом элементе пакета;
i – индекс элемента пакета 1, 2. 3, …;
![]() - волновое число i –того элемента;
- волновое число i –того элемента;
![]() – волновое сопротивление элемента.
– волновое сопротивление элемента.
Выбор размеров элементов ПП лучше начинать с
![]() . (3)
. (3)
 . (4)
. (4)
 . (5)
. (5)
l2 – выбирается из справочника или условия механической прочности.
Поскольку в условиях резонанса разный сдвиг фаз равен π
 . (6)
. (6)
Общая длина преобразователя
![]() . (7)
. (7)
Эффективность работы преобразователя сильно зависит от положения пьезоэлемента (ПЭ) в системе узел – пучность. Наиболее тяжелые условия с точки зрения механических нагрузок создаются при помещении ПЭ в узел колебаний (плоскость максимальных механических напряжений). В этом случае удельная мощность ограничивается прочностью керамики. Высокий КПД получается при размещении ПЭ на конце преобразователя. При этом уменьшается механическое напряжение в рабочем сечении, что позволяет увеличить Pэ . Однако при этом значительно возрастает входное сопротивление преобразователя, что требует увеличения питающего напряжения. При размещении ПЭ в узле колебаний (минимуме механических напряжений) и выполнении отражающей накладки из материала с большим волновым сопротивлением становится сильно заметным влияние дестабилизирующих факторов (температуры, нагрузки, системы крепления). Оптимальным считается размещение ПЭ между узловой плоскостью и торцом пакета. При этом прочность, КПД и стабильность будут достаточно высокими.
Электрический расчет ПП
Действующее переменное напряжение на резонансной частоте многослойного преобразователя с накладками можно определить по формуле
 , (8)
, (8)
где ![]() - акустическое сопротивление нагрузки ПЭ.
- акустическое сопротивление нагрузки ПЭ.
![]() , (9)
, (9)
где ![]() – коэффициент нагрузки преобразователя;
– коэффициент нагрузки преобразователя;
 - коэффициент электромеханической трансформации;
- коэффициент электромеханической трансформации;
E – модуль упругости.
Действующее значение тока
![]() , (10)
, (10)
где Zвх – полный модуль входного сопротивления преобразователя.
 , (11)
, (11)
где ![]() - емкостное сопротивление преобразователя.
- емкостное сопротивление преобразователя.
![]() , (12)
, (12)
где ![]() - собственная емкость преобразователя.
- собственная емкость преобразователя.
Полное активное сопротивление многослойного преобразователя, приведенного к параллельной схеме
![]() . (13)
. (13)
Здесь![]() - сопротивление диэлектрических потерь.
- сопротивление диэлектрических потерь.
![]() - механическое сопротивление преобразователя на резонансной частоте.
- механическое сопротивление преобразователя на резонансной частоте.
Мощность, потребляемая преобразователем
![]() (14)
(14)
Конструкции многослойных ПП
Наиболее распространенныеконструкции многослойных ПЭ преобразователей изображены на рис. 2. Преобразователь состоит из двух пьезокерамических пластин 1, излучающей накладки 2, отражающей накладки 3, прокладок 4 из мягкой фольги и стягивающего болта 5. Для соединения применяется склеивание, пайка или шпилька, а резьбовые соединения делают прослабленными. Шпилька наиболее простое соединение. Усилие сжатия такого пакета должно превышать возникающие при работе ПП растягивающие механические напряжения в 1,2 – 1,5 раза. Клеят эпоксидным клеем или паяют припоями с tпл < температуры Кюри ПЭ. Величина коэффициента отражения зависит от состояния контактирующих поверхностей накладок и керамики. Поэтому сопрягаемые поверхности тщательно полируются и притираются. При склеивании между ними не должно быть пузырьков воздуха. При работе преобразователь нагревается за счет электрических потерь. Особенно сильно пакет греется, если пластина ПЭ оказывается точно в узле колебаний, а металлические накладки имеют высокое волновое сопротивление. При нагреве резонансная частота преобразователя уходит (меняет свое значение). В большинстве случаев удобно иметь заземленные металлические накладки, так их легче крепить в оборудовании и не надо вводить деталей для электрической изоляции преобразователя. С этой целью активные элементы пакета набирают из нескольких деталей. Например, из двух шайб. Тогда между ними можно установить токоподводящую шайбу, а металлические накладки заземлить. При сборке пакета надо помнить, что соприкасающиеся стороны ПЭ элементов должны иметь одинаковый знак поляризации, например «+». Если отсутствует маркировка заводская, то знак поляризации определяется экспериментально.

Рисунок 2 – Конструкции многослойных преобразователей.
А) – с фланцевым креплением; б) – с центральным болтом; в) – с центральным болтом Т-образной формы.
1 – пьезокерамические пластины, 2 – излучающая накладка, 3 – отражающая накладка, 4 – прокладка, 5 – болт стягивающий, 6 – контактны.
Схема замещения ПП
Каждый тип ПП описывается своей электромеханической схемой замещения. Тем не менее, все схемы могут быть пересчитаны в чисто электрическую схему одного вида.
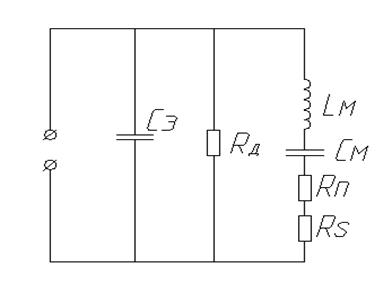
Рисунок 3 – Схема замещения ПП к электрическим величинам
Здесь:
LM – индуктивность, эквивалентная колеблющейся массе ПКП;
СМ – емкость, эквивалентная гибкости ПКП;
R П – активное сопротивление, эквивалентное сопротивлению механических потерь;
RS – активное сопротивление, эквивалентное сопротивлению излучения (нагрузки);
СЭ – емкость, эквивалентная электрической емкости пьезоэлектрическогопакета.
Сопротивление механических потерь обусловлено внутренним трением частиц материала при колебаниях. Силы трения пропорциональны колебательным скоростям. Коэффициент пропорциональности между ними и есть механическое сопротивление, в котором выделяется мощность потерь. Для каждого элементарного объема колеблющейся массы верно соотношение:
![]() , (15)
, (15)
где F тр i – сила внутреннего трения i-го объема;
Vi – колебательная скорость;
R п i – сопротивления потерь i-го объема.
Сопротивление излучения RS – определяется параметрами излучателя и пропорционально волновому сопротивлению окружающей среды:
RSi = ∙ ci ρi (16)
Электрическая емкость СЭ – обусловлена геометрическими размерами и величиной диэлектрической проницаемости материала пьезоэлектрика:
![]() ,
(17)
,
(17)
где S – площадь металлизации пьезоэлектрика;
l – толщина пьезоэлектрика.
Индуктивность LM – используется как электрическая величина, которая определяет кинетическую энергию колеблющейся массы (пропорционально квадраты колебательной скорости).
Емкость СМ – используется как электрический аналог потенциальной энергии колеблющейся массы (пропорциональна упругому смещению).
Резонансная характеристика ПП
Зависимость модуля полного входного сопротивления ПКП от частоты показана на рис.

Рисунок 4 – Резонансная характеристика ПП.
Как видим, характеристика имеет два экстремума: Zbx min на частоте f 1 обусловлено последовательным резонансом цепочки LM CM . С ростом частоты Zmin стремится к Zbx max на частоте f 2 . Этот максимум обусловлен резонансом параллельного контура, состоящего из емкости СЭ и цепочки LM CM , носящей индуктивный характер. Из-за наличия большой собственной емкости пьезоэлемента СЭ , резонансная частота f 0 в общем случае не совпадает с экстремумом, находится где-то посередине.
ЛИТЕРАТУРА
1.Орлов П.И. Основы конструирования. Справочно-методическое пособие. В 2-х кн. Кн.1. /Под ред. П.Н.Учаева. — 3-е изд. испр. — М.: Машиностроение, 2000
2.Конструирование приборов: В 2-х кн. /Под ред. В.Краузе; Пер. с нем. В.Н.Пальянова; Под ред. О.Ф.Тищенко. —Кн.1. М.: Машиностроение, 2006
3. Конструирование приборов: В 2-х кн. /Под ред. В.Краузе; Пер. с нем. В.Н.Пальянова; Под ред. О.Ф.Тищенко. — Кн.2. М.: Машиностроение, 2005
4.Машиностроение. Энциклопедия / Ред. Совет: К.В. Фролов(пред.) и др.; Технологии, оборудование и системы управления в электронном машиностроении. Т 3-8 / Ю.Н. Панфилов, Л.К. Ковалев, В.А. Блохин и др.; Под общ. Ред. Ю.В. Панфилова., 2000