| Скачать .docx |
Реферат: Тиристорный преобразователь постоянного тока
Министерство образования Российской Федерации
Вятский государственный университет
Кафедра «Электропривод и автоматизация
промышленных установок»
КУРСОВОЙ ПРОЕКТ
по дисциплине
«Преобразовательная техника»
« Тиристорный преобразователь
постоянного тока»
Вариант 24.5
Выполнил студент
...........................................................................................................................
Руководитель проекта:
............................................................................................................................
Киров, 2004
 Содержание
Содержание
1.Расчет силовой схемы тиристорного преобразователя постоянного тока.. 7
1.1.Выбор преобразовательного трансформатора. 7
1.2.Выбор силовых тиристоров. 9
1.3.Выбор сглаживающего дросселя. 11
1.4.1.Выбор быстродействующих плавких предохранителей. 13
1.4.3.Шунтирование вентилей. 15
2.Построение характеристик и расчет параметров тиристорного преобразователя постоянного тока.. 17
2.2.Построение зависимости E Д = f (I Д ) /рис.2.2/18
2.4.Определение минимального угла инвертирования. 21
2.5.Определение полной мощности, ее составляющих и коэффициента мощности ТП.. 21
3.1.Статические режимы работы ТП.. 24
4.Разработка системы импульсно-фазового управления тиристорного преобразователя.. 25
4.1.Система управления преобразователем.. 25
4.2. Принцип работы управляющего органа СИФУ.. 27
4.3.Описание силовой части схемы.. 28
Тиристорные преобразователи служат для преобразования переменного напряжения или тока в постоянное, постоянного напряжения или тока в переменное. Основными характеристиками ТП являются коэффициент полезного действия, коэффициент мощности и другие энергетические характеристики.
В вентильном электроприводе постоянного тока широкое распространение получили реверсивные преобразователи.
В реверсивных тиристорных электроприводах наибольшее распространение получила встречно-паралельная схема соединения вентильных групп, так как она имеет ряд преимуществ перед другими схемами: во-первых, содержит простой двухобмоточный трансформатор, который может быть применен как в реверсивном, так и в нереверсивном электроприводе, и имеет наименьшую типовую мощность по сравнению с трансформаторами в других схемах; во-вторых, может питаться непосредственно от трехфазной сети через анодные токоограничивающие реакторы; в-третьих позволяет унифицировать конструкцию реверсивного и нереверсивного электропривода.
Достоинства полупроводниковых преобразовательных устройств, к которым относится и тиристорные преобразователи постоянного тока, по сравнению с другими преобразователями неоспоримы: они обладают высокими регулировочными характеристиками и энергетическими показателями, имеют малые габариты и массу, просты и надежны в эксплуатации. Кроме преобразования и регулирования тока и напряжения обеспечивается бесконтактная коммутация токов в силовых цепях.
Совершенствование силовых полупроводниковых приборов и оптимальное сочетание их параметров с режимами преобразователя при его проектировании, использование эффективных методов исследования преобразователей способствуют разработке преобразовательных устройств с высокими технико-экономическими показателями.
I. Расчетная часть
Рассчитать параметры и выбрать элементы тиристорного преобразователя (трансформатор, вентили, сглаживающий дроссель, защитную аппаратуру), привести полную электрическую схему преобразователя с подробным описанием ее работы и назначения всех элементов.
II. Графическая часть
В соответствии с параметрами выбранных элементов схемы преобразователя рассчитать и построить:
1.Регулировочные характеристики системы управления ТП:
Ed =f (a), Ud =f (a), a = f (UУ ), Ed = f (UУ ), где
Ed , Ud – соответственно ЭДС и напряжение на выходных зажимах ТП;
UУ – напряжение управления, подаваемое на входные клеммы ТП;
a - угол регулирования, определяющий момент отпирания вентилей;
2.Внешние характеристики тиристорного преобразователя для следующих значений ЭДС на двигателе: ±EДН ; ±0.75×EДН ; ±0.5×EДН ; ±0.25×EДН ; EДН = 0,
где EДН – номинальное значение ЭДС на обмотке якоря двигателя;
3.Границу прерывистого режима работы преобразователя и совмещенные временные диаграммы кривых ed (u), i×RД (u), Ed (u), i (u) для трех случаев (номинальный, граничный и прерывистый токи) при a = const, где u = wС ×t;
4.Зависимость полной мощности и ее составляющих, коэффициента мощности от напряжения или скорости при выпрямленных токах Id = 0.5×IДН и Id = IДН ;
5.Временные диаграммы кривой выпрямленной ЭДС на выходе преобразователя при значениях напряжения UДН ; 0.5×UДН ; UД = 0 и напряжения на якоре электродвигателя для UД = UДН при EД = EДН ;
6.Выбрать структурную схему системы управления преобразователем, описать назначение блоков системы управления, и их взаимодействие в структуре, привести временные диаграммы, поясняющие принцип работы СУ ТП.
1.Совместно-согласованная схема тиристорного преобразователя с раздельным способом управления его преобразовательными группами (ПГ) /рис.1.1/
2.Основные параметры электродвигателя П-72:
Номинальная частота вращения, nном : 750 об/мин.
Номинальная мощность: 11 кВт.
Номинальное напряжение, Udn : 110 В.
Номинальный ток, Idn : 123 А.
Максимальная частота вращения: 1500 об/мин.
КПД двигателя: 81%.
3. Тип нагрузки: обмотка якоря ДПТ.
4. Параметры питающей сети:
Частота питающей сети, Гц: f = 50 Wc = 2πf = 314
Напряжение питающей сети, В: Uc = 380 В
Предел изменения напряжения в сети ∆UС , %: ∆UС = 5%
5. Параметры регулирования:
Колебания напряжения сети ∆UС , %: ∆UС = ± 10%
Допустимая амплитуда пульсации тока якоря, А:
IП . ДОП = (2…10%) % I dn , I dn = 123А, IП . ДОП = 2,46А.
Допустимая величина уравнительного тока, А:
IУР = 0,1 * Idn = 12,3А
6. Параметры схемы:
Коэффициент схемы: КСХ = 2,34.
Число фаз выпремления: m = 3.
Число пульсаций: p = 6.
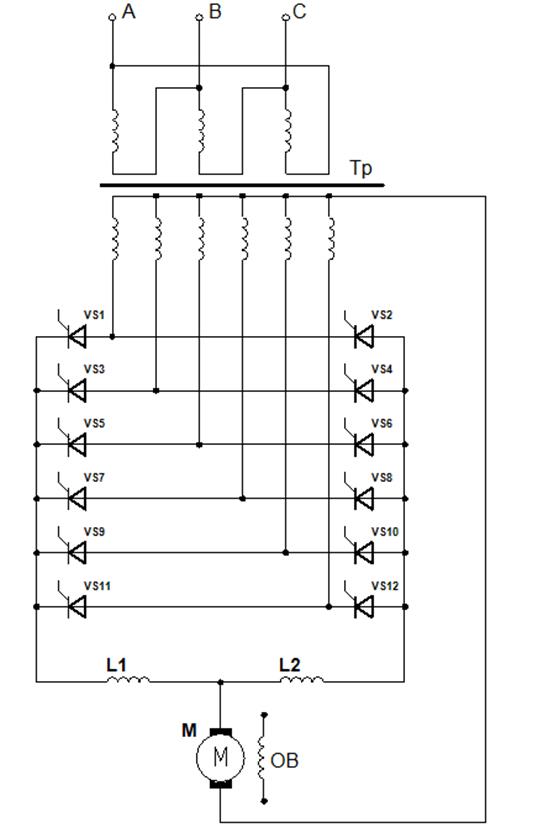 |
Рис.1.1. Схема тиристорного преобразователя
1.Расчет силовой схемы тиристорного преобразователя
Выбор всех элементов ТП производится в предположении, что нагрузка на валу электродвигателя не зависит от направления его вращения. В этом случае каждая ПГ в ТП работает совершенно одинаково, следовательно, расчет можно проводить только для одной группы.
1.1.Расчет мощности и выбор силового трансформатора
Для согласования заданной величины выпрямленного напряжения питающей сети и ограничения скорости тока в тиристорах ТП используется силовые трансформаторы.
![]() , (1.1)
, (1.1)
где
Eн – номинальное значение ЭДС электродвигателя;
Eн =UДН -IДН *RЯ
UДН – номинальное напряжение на якоре электродвигателя;
IДН – номинальный ток электродвигателя;
IДН – номинальное значение выпрямленного тока преобразователя;
RЯ – активное сопротивление двигателя с учетом сопротивления якоря, компенсационной обмотки и добавочных полюсов, приведенное к рабочей температуре 800 С;
![]()
Ориентировочные значения сопротивления обмотки якоря определяется следующей формулой:
![]()
amin – минимальный угол регулирования ТП (amin = 15 эл.град.);
DUВ – падение напряжения на тиристоре, орентировочно на предварительном этапе расчета принять ∆UВ = 1,2В.
ав – коэффициент зависящий от схемы выпрямления; ав =2
d, СТ , b – расчетные коэффициенты
d = 0,0043, СТ = 0,0052, b = 0,0025
Ксет – коэффициент, учитывающий индуктивностя сети переменного тока; Ксет = 1,4.
lн %, DPН % – напряжение короткого замыкания и потери в меди трансформатора; lн % = 7%, DPН % = 2%.
K1 – коэффициент перегрузки двигателя по току (K1 = Idmax /Idn =370/123=3);
Idmax – максимальный ток электродвигателя;
RS - суммарное активное сопротивление цепи выпрямленного тока(обмотка силового трансформатора, реакторов, полное сопротивление якорной цепи электродвигателя, динамическое сопротивление тиристоров и т.п.);
RS =RТР +Rd ц +Rр +nRдин
где т – число тиристоров, последовательно обтекаемых током;
Rдин – динамическое сопротивление тиристоров проводящем состоянии (при подстановки этого значения учитывается общее число последовательно соединяемых вентилей в цепи нагрузки в проектируемой схеме преобразователя).
Величина Id н RΣ на этапе предварительного расчета может быть принято равной (0,1…0,2) Uдн ;
Id н * RΣ = 0,15*110=16,5
![]() В
В
![]() В
В
Величина требуемого фазного напряжения на вторичной стороне силового трансформатора для мостовых схем ТП определяется соотношением:
![]()
![]() В
В
Расчетная мощность трансформатора определяется по формуле
![]()
Где Kn – коэффициент, зависящий от схемы выпрямления Kn =1,045
S=1.045*151.15*123=19428.06=20кВа
В соответствии с расчетными значениями S=20кВа и U2ф =65В, выбираем трансформатор серии ТСП 25/0,7
Номинальные данные трансформатора ТСП 25/0,7
Sном = 29кВа ∆Рк,з = 1300Вт
Uл = 380В ∆Рх,х = 170Вт
U2ф = 75В eкз % = 5,4%
I2ф = 128,9А Ixx = 6.3A
Определим линейное напряжение вторичной обмотки трансформатора
![]() В
В
Определим максимальное значение выпрямленной ЭДС Уd0 для трехфазной мостовой схемы выпрямления при l=0
![]() В
В
Найдем полное сопротивление фазы трансформатора, приведенное на вторичной обмотке:

I2 Л – линейный ток вторичной обмотки

Активное сопротивление фазы трансформатора

Индуктивное сопротивление фазы трансформатора
![]()
Индуктивность фазы трансформатора, Гн

Где fc – частота питающей сети, Fc =50Гц
1.2.Расчет индуктивности и выбор токоограничивающего реактора.
Так как в схеме отсутствуют токоограничивающие реакторы, то их выбор не производят.
1.3.Выбор силовых тиристоров .
Выбор тиристора по напряжению и его класс осуществляются на основании следующей расчетной формулы:

Где Кдн – коэффициент равномерности деления напряжения по последовательно соединенным тиристорам (при N=1, Кдн =1, при N>2, Кдн =0.8); Кдн =0.8
N- число последовательно соединненых тиристоров в схеме эквивалентного вентиля; N=2
Ψnw – коэффициент нагрузки, значение Ψnw предварительно принимается Ψ=0,5-0,6 затем проверяется после выбора тиристора,

Где UWM – наибольшее рабочее напряжение на тиристоре для данной схемы;
U2Л , U2Ф – соответственно линейное и фазное напряжение вторичной обмотки трансформатора;
Расчетное значение Uобр.мах округляется до сотен, полученное число делится на 100 вольт, результат деления это класс тиристора.

Выбираем тиристор Т2-320-3
Iос,ср мах = 320А
Tк = 85°С
Uоб.мах = 300В
1.4.Выбор реакторов для ограничения уравнительных токов при согласованном управлении преобразовательными группами.
Требуемая индуктивность уравнительного реактора, исходя из задонного допустимого значения уравнительного тока может быть определена из соотношения:

Где U2М =U2Ф.М – амплитуда фазного напряжения для трехфазной встречно-паралельной схеме, для трехфазной и шестифазной нулевой перекрестной схемы:
U2М =U2Л.М – амплитудалинейного напряжения для трехфазноймостовой перекрестной схемы:
Iур – действующее значение уравнительного тока в большинстве случаев его можно принять равным 10% от номинального тока электродвигателя:
Кд – коэффициент действующего значения Iур , определяемый видом преобразователя и диапозоном изменения угла регулирования α.
Величина Кд определяется на основании кривых (рис 2.8) в методическом пособияи.
Iур = 10% Id н = 12,3А
U2М = 75В
WС = 2πfС = 2*3,14*50 = 314
Кд = 0,38

Выбираем реактор ФРОС 250/0,5
Iн = 250A
L = 6.5Гн
R = 0,018 Ом
1.5.Расчет индуктивности и выбор сглаживающего дросселя .
Величина индуктивности дросселя зависит от его назначения, силовой схемы преобразователя, расположения дросселей в схеме.
Сглаживающий дроссель (СД) включается последовательно с якорем двигателя, и его индуктивность выбирается из следующих условий.
а) сглаживание пульсаций выпрямительного тока до требуемой величины обеспечивающей удовлетворительную коммутацию двигателя;
б) обеспечение непрерывного выпрямленного токапри минимальной нагрузке на валу двигателя (исключая реверсивные преобразования с совместным управлением).
Индуктивность сглаживающего дросселя находится по уравнению:
![]()
Где Lкр – критическая индуктивность, обеспечивающая выполнение вышеперечисленных условий, Гн;
Lя – индуктивность якоря двигателя, Гн.

β – эпирический коэффициент, для компенсированных машин β=0,1- 0,25, для некомпенсированных β=0,6;
β=0,6;
р – число пар полюсов;
Uн , In , ωн - номинальное значение напряжений, тока, частоты вращения двигателя;

nн – номинальная скорость вращения, об/мин

LФ – индуктивность питающей фазы трансформатора или сетевого реактора с учетом индуктивности питающей сети.
Критическая индуктивность обеспечивающаявыполнение первого условия находится по уравнению;

Где Еdm – амплитуда основной гармонической выпрямительной ЭДС.

 - амплитуда основной гармонической ЭДС в функции угла α, для реверсивных электроприводов Еdm
обычно определяется при α=90°(наибольшее амплитудное значение);
- амплитуда основной гармонической ЭДС в функции угла α, для реверсивных электроприводов Еdm
обычно определяется при α=90°(наибольшее амплитудное значение);
![]()
m – число фаз, m=6
ab– коэффициент схемы; ab=2.
![]() - допустимое действующее значение основной гармоники переменной состовляющей выпрямленного тока, обычно 2-15%, меньшее значение
- допустимое действующее значение основной гармоники переменной состовляющей выпрямленного тока, обычно 2-15%, меньшее значение ![]() берется для двигателей большой мощности, для которыхусловия коммутации обычно напряженные, для двигателей малой и средней мощности
берется для двигателей большой мощности, для которыхусловия коммутации обычно напряженные, для двигателей малой и средней мощности ![]() целесообразно увеличить до 8-15%, так как токое увеличение,не сказываясь существенно на коммутации двигателя, снижает габариты сглаживающего дросселя.
целесообразно увеличить до 8-15%, так как токое увеличение,не сказываясь существенно на коммутации двигателя, снижает габариты сглаживающего дросселя. ![]() =12%
=12%
![]()
Для ликвидации режима прерывистого тока на холостом ходу двигателя Iяхх необходимо обеспечить превышение тока холостого хода двигателя над граничное-непрерывным значением тока Iсгр преобразователя.
Критическая индуктивность, обеспечивающая выполнение второго условия, находится по уравнению:
![]()
Где α – угол регулирования, при котором двигатель работает стоком Iяхх и заданной скоростью ωзад ;
![]()
![]()
КФ – постоянная двигателя при Ф=ФН =const? Bc;
Rя80 0 с – сопротивление якорной цепи двигателя с учетом компенсационной обмотки и добавочных полюсов;
Iяхх - ток холостого хода двигателя можно определить:
![]()
η – КПД машины.
ωзад – минимальная по заданию частота вращения вала машины.
Rэ – эквивалентное активное сопротивление преобразователя,
Rэ =Xd (Ксх π/Р)=0.03297(2*3.14/4)=0.021 Ом
Где Xd – приведенное по вторичной цепи индуктивное сопротивление фазы трансформатора.
Xd = ωс Lф /Ксх =314*0.00021/2=0.03297 Ом
ωс – угловая частота питающей сети.
Ксх = ab=2
Lтр – индуктивность трансформатора, приведенная к цепи выпрямленного тока.
![]()
α=79.350
![]()
Из двух значений критической индуктивности выбираем большее; выбираем Lкр2 =0.001422098 Гн и подставляем в уравнение:
Lcd =LKP Lя -abLф =0.001422098-0.00171-2 0.00021=-0.00070 Гн
Так как значение Lcd получилось отрицательное, следовательно дросселя не существует, т.к. Lcd отрицательное. То данная схема уже обеспечивает сглаживающую пульсацию тока.
Большенство промышленных ТП снабжено быстродействующей защитой, которая при коротком замыкании блокирует или сдвигает к границе инверторного режима управляющие импульсы до включения очередного по порядку включения тиристора. Поэтому при внешних и внутренних к.з. в этих ТП аварийные токи протекают по двум плечам трехфазной мостовой схемы и двум фазам вторичной обмотки трансформатора, т.е. имеет место двухфазное к.з. трансформатора.
Амплитуда и продолжительность протекания аварийного тока при отпирание тиристоров в передающей группе РТП с раздельным управлением и при нарушении соотношения α1 +α2 ≥1800 в РТП с совместным управлением не превосходят их значений при внешнем к.з.
При внешних к.з. расчет токов ведется в предположении, что угол регулирования ТП α =0, при этом токи к.з. максимальны.
Для нахождения ударного тока глухого внешнего к.з. (к.з. на зажимах ТП до СД) вначале находится амплитуда базового тока к.з.:

Где U2мф – амплитуда фазного напряжения вторичной обмотки трансформатора при х.х.;
Х2 n V2 n – приведенные к вторичной стороне реактивные и активные сопротивления одной фазы трансформатора.

Находим ударный ток глухого внешнего к.з.
Iуд=Iк.м * Iуд *
Iуд * находят по графику в зависимости от ctg φк
Iуд * =1,25А
Iуд =1100*1,25=1375А
Интеграл предельной нагрузки при глухом внешнем к.з. определяется по формуле:
I2 t=I2 км (I*2 t)
В которой I*2 t определяется в зависимости от ctg φк
I2 t=11002 *10*10-3 =12100=12.1кА
![]()
Где WB – максимально допустимое значение интеграла квадрата аварийного тока, исчесляемое, при длительности импульса 10мс в заданной температуре структуры 0 С
Wпр – интеграл плавления плавкой вставки, определяющий количество энергии, необходимое для расплавления плавкой вставки.
![]()
nд =1.2 – коэффициент запаса.
Защита от перенапряжений.
Перенапряжения на вентилях могут проявляться как при переодической коммутации вентилей, возникающей при каждом переходе тока с одного вентиля на другой, так и от коммутации во внешних цепях.
Величина сопротивления выбирается из соотношения:
![]()
Где Lк – индуктивность коммутационного контура.
С – выбранная величина емкости защитной цепочки.
С=1мкФ
Lк =Lт +Lур =0.00738+0.00759=0.01497 Гн
![]()
![]()
Определим мощность каждого резистора.
Pr =450*C*U2 ф 2 =450*1*10-6 *752 =2.53Вт
Шунтирование вентилей
С=1.5…2мкФ
![]()
![]()
![]()
Определим мощность резистора
Pr =450*C*U2ф 2 =450*1.5*10-6 *752 =3.79Вт
Выбираем резисторы для шунтирования марки ПЭВ Р=20Вт
Диапозон полного сопротивления R=4.7…20*103 Ом
Для защиты от перенапряжения выбераем резисторы С5-36В
Конденсаторы металлобумажные марки К-409
С=1мкФ
Р=5Вт
U=200B
F=10-1000Гц
Конденсаторы металлобумажные марки К-409
С=1.5мкФ
Р=5Вт
U=200B
F=10-1000Гц
Выбераем предахранитель ПБВ-2
Iн =320А
ω пр =100кАс
Uн =380В
2.Основные характеристики тиристорных преобразователей
2.1.Построение фазовой характеристики.
Основными характеристиками ТП являются: регулировачная характеристика (характеристика управления) ![]() и внешняя характеристика
и внешняя характеристика![]() .
.
Выпрямленная ЭДС преобразователя является функцией угла регулирования, который отсчитывается от точки естественного включения вентилей, и в режиме непрерывного тока может быть определена по уравнению:

Где ![]() - максимальное ЭДС преобразователя при α=0;
- максимальное ЭДС преобразователя при α=0;
Е2 m - амплетудное значение вторичной фазовой ЭДС трансформатора (сети при реактивном варианте силовой цепи преобразователя)
![]() - действующее значение фазовой ЭДС
- действующее значение фазовой ЭДС
![]() - начальная фаза соответствующая точке естественного включения тиристора в работу
- начальная фаза соответствующая точке естественного включения тиристора в работу
![]() - угловая частота питающего напряжения
- угловая частота питающего напряжения
Кcx - коэффициент схемы выпрямления.
Кроме того для шестипульсной мостовой и эквивалентной двенадцатипульсной схем выпрямления с параллельным соединением мостов
можно воспользоваться формулой:
![]()
а для эквивалентной двенадцатипульсной схемы с последовательным соединением мостов:
![]()
где E2 M - амплитуда линейной питающей ЭДС каждого моста.
Вид фазовой характеристики СИФУ α=f(Uу ) полностью определяется формой опорного напряжения. При линейно изменяющемся опорном напряжении изменению угла α=π/2 соответствует изменение напряжения на выходе генератора опорного напряжения ГПН, равное Uопт (Uопт =10В).
При опорном синусоидальном напряжении с амплитудой проходящем через нуль при α=900 угол управления определяется как
![]()
αнач =900 при синусоидальном опорном напряжении
| α | Uу | α | Uу |
| 900 | 0 | 00 | 10 |
| 84.20 | 1 | 95.730 | -1 |
| 78.50 | 2 | 101.50 | -2 |
| 72.50 | 3 | 107.450 | -3 |
| 66.420 | 4 | 113.570 | -4 |
| 600 | 5 | 1200 | -5 |
| 530 | 6 | 126.80 | -6 |
| 45.50 | 7 | 134.40 | -7 |
| 36.860 | 8 | 143.10 | -8 |
| 25.80 | 9 | 154.10 | -9 |

Фазовая характеристика
2.2.Построение регулировачной характеристики
При синусоидальном напряжении

Или

αнач =900
Uоп. m =10B
Uу =±10В

| 0,1 | 1 | 0,8 | 8 | -0,4 | -4 |
| 0,2 | 2 | 0,9 | 9 | -0,5 | -5 |
| 0,3 | 3 | 1 | 10 | -0,6 | -6 |
| 0,4 | 4 | 0 | 0 | -0,7 | -7 |
| 0,5 | 5 | -0,1 | -1 | -0,8 | -8 |
| 0,6 | 6 | -0,2 | -2 | -0,9 | -9 |
| 0,7 | 7 | -0,3 | -3 | -1 | -10 |

Регулировочная характеристика
2.3. Построение внешних характеристик теристорного преобразователя.
Внешняя характеристика ТП в режиме непрерывного тока в соответствии со схемой замещения системы ТП-Д может быть представлена следующим уравнением

Где ab - коэффициент зависящий от схемы выпрямления для мостовой схемы ab=2.
Rф - активное сопротивление питающей фазы
Rф =0,021 Ом
Хф - индуктивное сопротивление питающей фазы.
Хф =0,066 Ом
В трансформаторном варианте сопротивления Rф и Хф равны соответственно сопротивлениям трансформатора Rт и Хт , приведенным по вторичной обмотке трансформатора.
| α, 0 | 1800 | 1500 | 1200 | 900 | 600 | 300 | 150 |
| Ud , B | |||||||
| Id , A | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| α, 0 | 1800 | 1500 | 1200 | 900 | 600 | 300 | 150 |
| Ud , B | |||||||
| Id , A | 123 | 123 | 123 | 123 | 123 | 123 | 123 |
Внешние характеристики тиристорного преобразователя.
Так как в данном тиристорном преобразователе нет зоны прерывистых токов,то эту зону построим.
Находим границу инвентирования.
Находится по следующей формуле:
![]()
где δ -угол восстановления запирающих свойств тиристоров.

tотк -время выключения данного тиристора.
tотк =0,01с

∆α - наибольшее значение ассиметрии управляющих импульсов во всем диапазоне изменения угла регулирована,но не более 30 .
![]()
3.Энергетические характеристики тиристорного преобразователя.
3.1.Общие вопросы.
Тиристорные преобразователи создают в питающей сети переменные переодические токи,в большей или меньшей степени отличающиеся от синусоидальных гармонических функций времени. Из-за наличия в питающей сети сопротивлений под действием этих токов, напряжение питающей сети также становится несинусоидальными. Особенно значительна несинусоидальность напряжений на входах тиристорных преобразователей ,которые при естественной коммутации токов между вентилями междуфазное которое замыкание на входе переменного тока.
При коммутационных к.з. также как и при аварийных ,напряжение между фазами, замкнутыми коммутирующими вентилями накоротко, становится близким к нулю и остается таким в течении всего времени коммутации. В точках питающей сети, электрически удаленных от работающего тиристорного преобразователя, понижение напряжения, вызванное коммутацией .(провалы),уменьшается в соответствии с соотношением к.з. со стороны питающей сети до тиристорного преобразователя и до рассматриваемых точек.
При пренебрежении длительностью коммутации и при идеальном сглаживании выпрямленного тока отношение действующего значения тока высшей гармоники 1 порядка к действующему значению I1 ,основной гармоники тока тиристорного преобразователя определяется соотношением:

Более точное соотношение требует значение угла коммутации и соответствует линейному изменению токов коммутирующих вентилей в процессе коммутации:

где y - угол коммутации, рад.
Отношение энергии, переданной тиристорному преобразователю из питающей сети за период к длительности этого периода называется активной мощностью. При несинусоидальных токах периода называется активной мощностью. При несинусоидальных токах и напряжениях активная мощность может быть определена как сумма произведений действующих значений токов, напряжений и косинусов углов отставания токов от напряжения для всех гармоник, имеющих одинаковые номера п.Активная мощность многофазной системы равна сумме активных мощностей для всех фаз. При замене косинусов на синусы получаются реактивные мощности гармонии.
Активная мощность каждой гармоники определяется напряжением этой гармоники и синфазной (противофазной) с напряжением частью тока этой же гармоники, которая называется активным током. Оставшаяся после вычитания активного тока гармоники часть тока называется реактивным током. Тот факт, что в нагреве токоведущих частей питающей сети участвуют как активные токи, так и реактивные, а активная энергия передается лишь активными токами, характеризует пользование питающей сети.
Отношение активной мощности к полной мощности является важнейшим энергетическим показателем тиристорного преобразователя и называется коэффициентом мощности Х, которым характеризуется использованием питающей сети:
![]()
В зоне непрерывного тока регулировочная характеристика может быть построена на основании соотношения:
![]() . (2.1)
. (2.1)
График выпрямленного напряжения на якоре электродвигателя при номинальном токе нагрузки в функции a строится по соотношению:
![]() , (2.2)
, (2.2)
где RВП - сопротивление цепи выпрямленного тока, за исключением сопротивления якоря электродвигателя;
![]() , (2.3)
, (2.3)
где Ra -активное сопротивление фазы трансформатора;
RДИН - динамическое сопротивление тиристора;
К – число тиристоров последовательно, последовательно обтекаемых током;
![]()
Результаты занесены в табл. 2.1
Табл. 2.1
| a [град] | E d (a) [В] | U ЯД (a) [В] |
| 0 | 178.8 | 167.98 |
| 30 | 154.8 | 144.03 |
| 60 | 89.4 | 78.5 |
| 90 | 0 | -10.8 |
| 120 | -89.4 | -100.2 |
| 150 | -154.8 | -165.6 |
| 180 | -178.8 | -189.6 |
Исходя из равенства (2.1), определяется aнач :
 , (2.4)
, (2.4)


Рис.2.1. Регулировочные характеристики
2.2.Построение зависимости E Д = f (IД ) /рис.2.2/
Силовая цепь постоянного тока, включающая преобразователь и якорную цепь двигателя, может быть представлена в установившихся режимах схемой замещения /рис.2.3/. Показанное на рис. направление ЭДС преобразователя Ed соответствует работе ТП в выпрямительном режиме (Ed >0), а направление ЭДС двигателя EД - работе его в двигательном режиме (EД >0).
Среднее значение тока якорной цепи (тока нагрузки ТП) при условии, что
Ed > EД определяется выражением
 , (2.5)
, (2.5)
где
RS -суммарное активное сопротивление цепи выпрямленного тока;
![]() , (2.6)
, (2.6)
R К - коммутационное сопротивление;
 , (2.7)
, (2.7)


Рис.2.3 Схема замещения в установившихся режимах
Если Ed £EД ,ток нагрузки IД в якорной цепи протекать не будет, т.к. тиристоры не пропускают его в обратном направлении.
Решая уравнение (2.5) относительно EД , получаем ЭДС на зажимах двигателя от тока нагрузки IД при угле регулирования a = const:
![]() , (2.8)
, (2.8)
Результаты сведены в табл. 2.2 ниже.
2.3.Построение зоны прерывистых токов в системе
координат EД (IД )
При построении зависимости EД = f (IД ) предполагалось, что она линейна и преобразователь всегда работает в режиме непрерывного тока якорной цепи. Фактически же при малых моментах нагрузки на валу двигателя в кривой выпрямленного тока i появляются разрывы и ток становится прерывистым.
Ширина зоны прерывистых токов, т.е. значение IГР , зависит от суммарной индуктивности цепи выпрямленного тока LS и угла a:
 (2.9)
(2.9)
После определения IГР = f (a) /табл. 2.2/ построим эту зависимость графически на EД = f (IД ) /рис. 2.2/.
Табл. 2.2
| Iд=Iдн | Iд=0.5·Iдн | ||
a [град] |
EД [B] |
EД [B] |
IГР [А] |
| 123.4 | -122.4 | -112.3 | 3.3 |
| 112.7 | -91.8 | -81.7 | 3.64 |
| 102.8 | -61.2 | -51.1 | 3.85 |
| 93.2 | -30.6 | -20.5 | 3.94 |
| 83.7 | 0 | 10.1 | 3.93 |
| 74.1 | 30.6 | 40.7 | 3.8 |
| 64 | 61.2 | 71.3 | 3.55 |
| 52.9 | 91.8 | 101.9 | 3.15 |
| 39,8 | 122.4 | 132.5 | 2.53 |

Рис.2.2. Зависимости E Д = f (I Д )
2.4.Определение минимального угла инвертирования
При работе преобразователя в инверторном режиме система управления ТП должна обеспечить ограничение величины минимального угла регулирования с тем, чтобы избежать возможного прорыва инвертора. Этот угол должен быть больше суммы угла коммутации (g) и угла, определяющего время восстановления запирающих свойств вентиля (q), т.е.
bmin ³g + q , (2.10)
Величина угла коммутации определяется соотношением
 (2.11)
(2.11)
А значение угла, определяющего время восстановления запирающих свойств вентиля
 , (2.12)
, (2.12)
где ![]() -время выключения вентиля;
-время выключения вентиля;

Значения угла g занесены в табл. 2.3
Табл. 2.3
| a , град. | 125 | 114 | 104 | 94 | 84 | 74 | 64 | 53 | 40 |
| g(a) , град. | 1.52 | 1.37 | 1.29 | 1.26 | 1.26 | 1.3 | 1.39 | 1.56 | 1.92 |
Минимальный угол регулирования примет значение
![]()
2.5.Определение полной мощности, ее составляющих и коэффициента мощности ТП
Величина полной мощности и ее составляющих может быть определена на основании следующих соотношений.
Относительная величина полной мощности, потребляемой ТП из питающей сети при линейном изменении коммутационного тока:
 . (2.13)
. (2.13)
Относительная величина активной составляющей мощности:
 . (2.14)
. (2.14)
Относительная составляющая реактивной мощности:
 . (2.15)
. (2.15)
Относительная величина мощности первой гармоники:
 . (2.16)
. (2.16)
Относительная величина мощности скольжения:
![]() . (2.17)
. (2.17)
Коэффициент мощности преобразователя:
 . (2.18)
. (2.18)
Результаты вычислений сведены в табл. (2.4) и табл. (2.5) для Iд=Iдн и Iд=0.5·Iдн соответственно.
На основании соотношений 2.13¸2.18 и табл.2.4 и 2.5 строятся зависимости вышеприведенных величин в функции относительного значения ЭДС электродвигателя EД / EДН /рис.2.4/.
Табл. 2.4
| a [град] | SI |
P |
Q |
S1 |
Sm |
Km |
| 126 | 1.045 | -0.56 | 0.827 | 0.99991 | 0.3035 | -0.54 |
| 114 | 1.0452 | -0.4 | 0.918 | 0.99993 | 0.3042 | -0.38 |
| 103 | 1.0453 | -0.23 | 0.973 | 0.99994 | 0.3046 | -022. |
| 92 | 1.0453 | -0.07 | 0.998 | 0.99994 | 0.3047 | -0.06 |
| 82 | 1.0453 | 0.1 | 0.955 | 0.99994 | 0.3047 | 0.09 |
| 71 | 1.0453 | 0.26 | 0.965 | 0.99994 | 0.3045 | 0.25 |
| 60 | 1.0451 | 0.43 | 0.904 | 0.99993 | 0.3041 | 0.41 |
| 47 | 1.0459 | 0.59 | 0.805 | 0.99991 | 0.3033 | 0.57 |
| 30 | 1.0454 | 0.76 | 0.652 | 0.99986 | 0.3016 | 0.79 |
Табл. 2.5
| a [град] | SI ’ |
P’ |
Q’ |
S1 ’ |
Sm ’ |
Km ’ |
| 126 | 1.046 | -0.61 | 0.792 | 0.99991 | 0.3035 | -0.54 |
| 114 | 1.0461 | -0.45 | 0.895 | 0.99993 | 0.3042 | -0.38 |
| 103 | 1.0462 | -0.28 | 0.96 | 0.99994 | 0.3046 | -0.22 |
| 92 | 1.0462 | -0.12 | 0.993 | 0.99994 | 0.3047 | -0.06 |
| 82 | 1.0463 | 0.05 | 0.999 | 0.99994 | 0.3047 | 0.09 |
| 71 | 1.0462 | 0.21 | 0.977 | 0.99994 | 0.3045 | 0.25 |
| 60 | 1.0462 | 0.38 | 0.925 | 0.99993 | 0.3041 | 0.41 |
| 47 | 1.0461 | 054 | 0.839 | 0.99991 | 0.3033 | 0.57 |
| 30 | 1.0469 | 0.71 | 0.705 | 0.99986 | 0.3016 | 0.79 |

Рис.2.4.
3.1.Статические режимы работы ТП
На графике мгновенного значения выпрямленного напряжения на выходе преобразователя /рис 3.1/ наносится линия постоянной составляющей (среднего значения) напряжения на выходе преобразователя и напряжения на якоре электродвигателя.

Рис 3.1
4.Разработка системы импульсно-фазового управления тиристорного преобразователя
4.1.Система управления преобразователем
Управление скоростью вращения двигателя осуществляется двухконтурной системой автоматического управления с ПИ-регулятором тока и скорости.
Для линеализации регулировочной характеристики преобразователя в зонах прерывистых токов используется нелинейное звено с сигналом положительной обратной связи по ЭДС двигателя.
Для повышения термостабильности и увеличения диапазона регулирование электропривода применяется предварительный регулятор скорости, выполненного по схеме модулятор – усилитель – демодулятор.
Преобразователь содержит следующие узлы для регулирования
· систему импульсно-фазового управления (СИФУ);
· регулятор скорости и тока (РС и РТ)
· функциональный преобразователь ЭДС двигателя (ФПЕ);
· блок питания (БП);
· узел защиты и блокировки (УЗ и Б);
· логическое устройство раздельного управления (УЛ) с переключателем характеристик (ПХ) и датчиком проводимости вентилей (ДПВ);
· узел зависимого от скорости токоограничения (УЗТ).
Выходное напряжение РС ограничивается уровнем насыщения операционного усилителя и с помощью переменного резистора делителя, подключенного к входу усилителя, может плавно регулироваться, задавая установку тока ограничения.
Параллельно узлу ограничения тока подключен узел зависимого от скорости токоограничения, который осуществляет дополнительное ограничение тока в функции скорости.
Регулятор тока формирует напряжение, пропорциональное разности сигналов задания на ток и отрицательной обратной связи по току.
При переключении комплектов тиристоров В и Н одновременно ключами В и Н производится изменение полярности выходного напряжения датчика тока для сохранения отрицательного знака обратной связи по току .
Нелинейное звено суммирует выходное напряжение регулятора тока Uрт, пропорциональное току двигателя, и напряжение Uе обратной связи по ЭДС с разными коэффициентами передачи. Коэффициент передачи НЗ по входу Uрт является нелинейным, имея зависимость, обратную коэффициенту передачи тиристорного преобразователя в зоне прерывистого тока. Коэффициент передачи НЗ по входу Uе является постоянным.
Сигнал Uе формируется функциональным преобразователем ЭДС, имеющим характеристику, близкую к апроксимированой, то есть обратную регулировочной характеристике тиристорного преобразователя. Этим осуществляется приведение сигнала тахогенератора, пропорционального ЭДС двигателя, ко входу СИФУ.
Разнополярное напряжение управления Uу нелинейного звена преобразуется переключателем характеристик в однополярное. Таким образом, в статическом режиме работы привода на управляющий орган СИФУ подается только отрицательная полярность напряжения, независимо от работающего комплекта тиристоров.
Управляющий орган СИФУ обеспечивает ограничение минимального и максимального углов регулирования, установку начального угла регулирования.
СИФУ вырабатывает импульсы управления для тиристоров. Фазовый сдвиг импульсов относительно силового напряжения на тиристорах пропорционален напряжению, поступающему на СИФУ от УО.
Усилители импульсов согласуют по мощности выход СИФУ с импульсными трансформаторами. Кроме того, на УИ происходит сдваивание импульсов.
Логическое устройство раздельного управления служит для формирования сигналов кл.В и кл.Н, управляющих ключами В и Н в датчике тока, переключателе характеристик и цепи импульсных трансформаторов.
Командой для УЛ на переключение комплектов является изменение полярности сигнала Uнз , пропорционального напряжению Uрт и коэффициенту передачи НЗ.
Контроль отсутствия тока через тиристоры производится датчиком проводимости вентилей.
Элемент И осуществляет логическое умножение блокировочных сигналов Uби и Uбв и имеет на выходе логический сигнал единичного уровня в тот промежуток времени, когда отсутствует ток через тиристор и управляющий импульс на тиристоре.
При появлении команды на переключение комплектов (напряжение Uнз изменило знак) и наличии на выходе элемента И сигнала единичного уровня УЛ формирует сигнал Uр =0 нулевого уровня, который запускает элемент отсчета выдержки времени. На период выдержки времени импульсные трансформаторы обоих комплектов находятся в отключенном состоянии, дополнительно сигнал Uр =0 запрещает формирование импульсов управления в СИФУ. По истечении выдержки времени происходит подключение импульсных трансформаторов к заданному комплекту, одновременно сигнал Uр =1 разрешается формирование импульсов в СИФУ.
4.2. Принцип работы управляющего органа СИФУ
Принципиальная схема формирователя импульсов включает в себя узлы: фильтр Ф, пороговые элементы ПЭ1 и ПЭ2, генератор пилообразного напряжения ГПН, формирователь синхронизирующих импульсов ФСИ, нуль-орган НО, RS-триггер Т, формирователь длительности импульсов ФДИ.
Фильтр осуществляет сдвиг синхронизирующего напряжения на угол 30 эл.град., совмещая тем самым начало зоны расширения выдачи импульсов на тиристор с точкой естественной коммутации силового напряжения на тиристорах. Выходное напряжение фильтра с помощью пороговых элементов ПЭ1 и ПЭ2 преобразуются в две противофазные последовательности прямоугольных импульсов.
Величина порога (зона нечувствительности) определяется падением напряжения на переходах база-эммиттер VT1 и VT2. Длительность импульса единичного уровня (около 176 эл.град.) определяет зону разрешения выдачи управляющих импульсов на соответствующий тиристор.
В промежуток времени перекрытия импульсов нулевого уровня на входах DD1.3, DD1.4 на выходе ФСИ формируется синхроимпульс единичного уровня длительностью около 8 эл.град. Этот импульс открывает транзистор VT8, осуществляющий разряд интегрирующей емкости С3 до нулевого уровня. После исчезновения синхроимпульса напряжение на выходе ГПН начинают линейно возрастать от 0 до 10 В за счет подачи на инвертирующий вход усилителя DА1 напряжения – 15В. Через R11 и R13 уровень возрастания выходного напряжения ГПН до прихода очередного синхронизирующего импульса может изменяться сменным резистором R11.
Момент равенства по модулю разнополярных напряжений ГПН и УО фиксирует нуль-орган на операционном усилителе DА2, полярность входного напряжения которого в этот момент меняется с положительной на отрицательную. Триггер воспринимает отрицательное выходное напряжение DА2 как логический сигнал нулевого уровня, изменяя свое состояние, соответствующее изменению логического сигнала на выходе DD2.2 с единичного уровня на нулевой. Появление на выходе ФДИ нулевого сигнала приводит к разряду конденсатора С2 по цепи: R14, выход DD2.2, V7. Во время разряда, определяемого элементами R14, C2, на диоде VD7 создается падение напряжения, запирающее VT6. В этот момент на входах микросхем DD1.2, DD2.3, DD1.1 появляется сигнал нулевого уровня. Прохождение импульса ФДИ в канал а
или ![]() определяется наличием на втором входе микросхем DD1.2, DD1.3 единичного сигнала от пороговых элементов.
определяется наличием на втором входе микросхем DD1.2, DD1.3 единичного сигнала от пороговых элементов.
После формирования управляющего импульса триггер Т ждет прихода очередного синхроимпульса, чтобы вернуться в исходное состояние и быть подготовленным к формированию следующего управляющего импульса. Установка Т в исходное состояние возможна только при одновременном наличии на входах Т сигнала единичного уровня от НО на входе DD2.1 и сигнала нулевого уровня на каком-либо из входов микросхемы D2.2. Во время стационарной работы комплектов тиристоров Т устанавливается в исходное состояние проинвертированными синхроимпульсами, поступающими с выхода микросхемы DD2.4, и таким образом в начале каждого полупериода синхронизирующего напряжения становится готовым для формирования следующего управляющего импульса.
4.3.Описание силовой части схемы
При управлении двигателями постоянного тока плавное регулирование скорости достигается за счет изменения напряжения питания цепи якоря или обмотки возбуждения. В режиме торможения энергия вращающихся частей отдается в сеть. Регулировка напряжения производится за счет угла задержки отпирания а тиристоров тиристорного преобразователя постоянного тока ТП. В режиме пуска идет набор двигателем скорости, а следовательно, повышение напряжения. Пусковой ток в несколько раз больше статического. Поэтому при пуске а @ p/2 для уменьшения тока. По мере пуска ток снижается, а напряжение на двигателе увеличивается. Когда ток уменьшится до какого-то минимального значения, двигатель набирает необходимую скорость и угол а устанавливается в статическое положение @ p/3 . Установку угла управления осуществляют за счет контроля тока при помощи цепей обратной связи. При выходе на номинальную характеристику, соответствующую углу амин ,двигатель вращается с номинальной скоростью и развивает номинальный момент.
В режиме торможения задается угол управления b , который переводит двигатель на соответствующую характеристику преобразователя, что и приводит к торможению двигателя. Углы b также, как и а задаются так, чтобы работа ТП была в токовом коридоре.
В данном курсовом проекте рассматривается схема реверсивного ТП с раздельной системой управления . Реверс выпрямленного напряжения осуществляется за счет двух антипараллельных трехфазных мостовых комплектов тиристоров. В каждый момент времени работает только один комплект (выпрямительный или инверторный). Переключение между комплектами производится с помощью логики в СУ.
Система управления формирует сдвоенные импульсы управления тиристорами для обеспечения работы схемы в зоне прерывистых токов.
1. Григорьев О.П. и др. Тиристоры. Справочник. – М. Радио и связь.1990.
2. Зимин Е. Н. и др. Электроприводы постоянного тока с вентильными преобразователями. – М.: Энергия, 1981.
3. Перельмутер В. М. и др. Системы управления тиристорными ЭП постоянного тока. – М.: Энергия, 1987.
4. Чебовский О. Г. и др. Силовые полупроводниковые преобразователи: справочник / Чебовский О. Г., Моисеев А. Г. – М.: Энергоатомиздат, 1985. – 400 с.: ил.
5. Чиженко И.М. и др. Основы преобразовательной техники: учебное пособие / Руденко В. С., Сенько В. И., Чиженко И.М. – М.: Высшая школа, 1980. – 430 с.: ил.