| Скачать .docx |
Курсовая работа: Синтез и анализ линейных систем автоматического управления
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
КУРГАНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Кафедра автоматизации производственных процессов
Тема курсовой работы:
«Синтез и анализ линейных систем автоматического управления»
Курсовая работа
Дисциплина: Теория автоматического управления
Студент: Есин С. С.
Группа: ТС-4667
Руководитель: Лебединский Б.П.
Курган 2010
Содержание
Введение
1. Задание на расчет
1.1 Исходные данные для расчета
2. Определение типов звеньев передаточных функций САУ
3. Определение устойчивости и расчет граничных параметров
4. Расчет статических характеристик САУ
5. Расчет логарифмических характеристик САУ
6. Расчет частотных характеристик замкнутой САУ и определение показателей качества регулирования
7. Расчет переходных характеристик замкнутой САУ
8. Синтез последовательного корректирующего устройства
Заключение
Список использованных источников
Введение
Система автоматического регулирования состоит из регулируемого объекта и элементов управления, которые воздействуют на объект при изменении одной или нескольких регулируемых переменных. Под влиянием входных сигналов (управления или возмущения), изменяются регулируемые переменные. Цель же регулирования заключается в формировании таких законов, при которых выходные регулируемые переменные мало отличались бы от требуемых значений.
Целью данной курсовой работы является выполнение синтеза и анализа следящей САУ. Синтез производится с помощью ЛАЧХ и ЛФЧХ.
Инструментальным средством реализации поставленных задач является система компьютерной алгебры MathCad.
1. Задание на расчет
1) Определить типовые звенья, входящие в структуру САУ.
2) Определить передаточные функции САУ и ее характеристический полином.
3) По критерию устойчивости Гурвица определить устойчивость САУ, рассчитать граничное значение коэффициента передачи разомкнутой цепи и построить область устойчивости САУ относительно варьируемых параметров ![]() и
и ![]() .
.
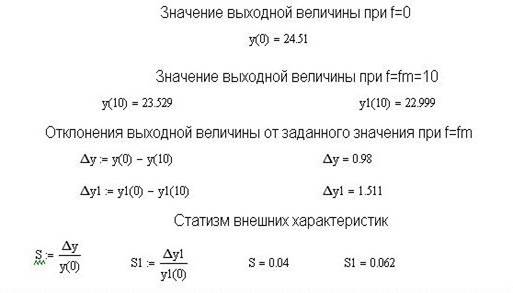
4) Построить статические внешние характеристики для заданной САУ и для САУ, у которой значение параметра ![]() выбрано с соответствии с заданным запасом устойчивости по амплитуде
выбрано с соответствии с заданным запасом устойчивости по амплитуде ![]() . Рассчитать статизм для обоих вариантов САУ и сравнить полученные результаты.
. Рассчитать статизм для обоих вариантов САУ и сравнить полученные результаты.
5) Для САУ, у которой значение параметра ![]() выбрано в соответствии с заданным запасом устойчивости по амплитуде
выбрано в соответствии с заданным запасом устойчивости по амплитуде ![]() , рассчитать асимтотическую и точную ЛАЧХ, точную логарифмическую фазовую частотную характеристику (ЛФЧХ) и определить запас устойчивости по фазе
, рассчитать асимтотическую и точную ЛАЧХ, точную логарифмическую фазовую частотную характеристику (ЛФЧХ) и определить запас устойчивости по фазе ![]() .
.
6) Для замкнутой САУ, у которой значение параметра ![]() выбрано в соответствии с заданным запасом устойчивости по амплитуде
выбрано в соответствии с заданным запасом устойчивости по амплитуде ![]() ,
рассчитать амплитудную (АЧХ) и вещественную (ВЧХ) частотные характеристики и определить по ним показатели качества регулирования.
,
рассчитать амплитудную (АЧХ) и вещественную (ВЧХ) частотные характеристики и определить по ним показатели качества регулирования.
7) Для замкнутой САУ, у которой значение параметра ![]() выбрано в соответствии с заданным запасом устойчивости по амплитуде
выбрано в соответствии с заданным запасом устойчивости по амплитуде ![]() , рассчитать переходные характеристики по задающему g
и возмущающему f
воздействиям, определить по пим показатели качества регулирования и сравнить результаты с ранее полученными.
, рассчитать переходные характеристики по задающему g
и возмущающему f
воздействиям, определить по пим показатели качества регулирования и сравнить результаты с ранее полученными.
8) Исходя из заданного времени переходного процесса fm
и перерегулирования ![]() , провести синтез последовательного корректирующего устройства и рассчитать переходную характеристику скорректированной САУ по задающему воздействию. Определить показатели качества регулирования для этой САУ и сравнить их с ранее рассчитанными.
, провести синтез последовательного корректирующего устройства и рассчитать переходную характеристику скорректированной САУ по задающему воздействию. Определить показатели качества регулирования для этой САУ и сравнить их с ранее рассчитанными.
1.1 Исходные данные для расчета
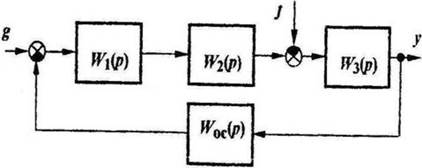
Рисунок 1 – Структурная схема исследуемой системы
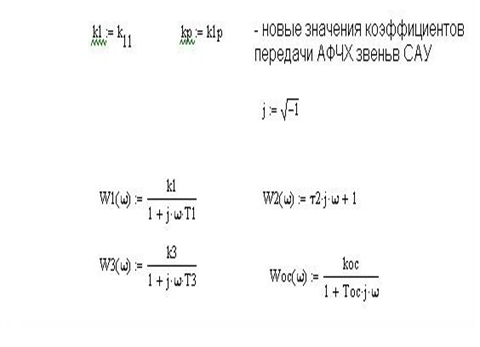
Передаточные функции звеньев САУ:
![]()
![]()
![]()
![]()
Таблица 1 – Параметры звеньев и варьируемые параметры
| Исходные параметры |
Варьируемые параметры |
|||||||||||
| k1 |
k3 |
koc |
T1, с |
T3, с |
Toc, с |
τ2, с |
g, В |
ΔG, дБ |
tпп, с |
f,В |
x1 |
x2 |
| 6 |
3 |
3 |
0,5 |
0,1 |
0,05 |
0,01 |
30 |
10 |
0,16 |
10 |
Tос |
K2 |
Примечание: f – максимальная величина возмущающего воздействия; g – задающее воздействие; Δ G – запас устойчивости по амплитуде; t пп – время переходного процесса (в секундах).
2. Определение типов звеньев передаточных функций САУ
Заданная САУ содержит следующие типовые звенья:
- звено W1( p ) , W2( p ), W3( p ) – инерционные;
- звено Woc ( p ) – пропорциональное.
Передаточная функция разомкнутой САУ по задающему воздействию:
![]()

Передаточная функция разомкнутой САУ по возмущающему воздействию:
![]()
![]()
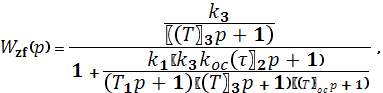
Передаточная функция разомкнутой цепи САУ:
![]()

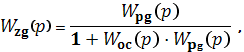
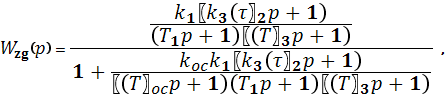
Передаточная функция замкнутой САУ по задающему воздействию:

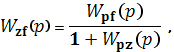
Передаточная функция замкнутой САУ по возмущающему воздействию:

Характеристический полином САУ:
![]()
![]()
![]()
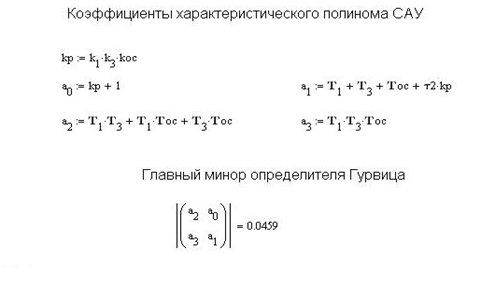
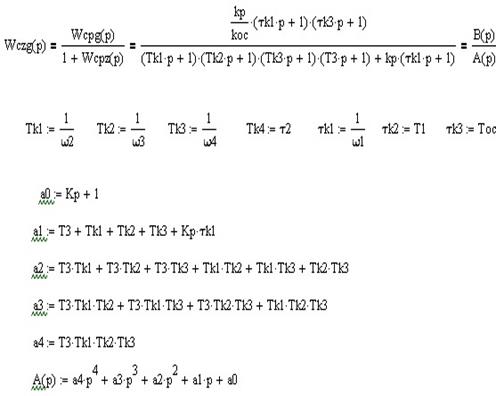
где Kp = k 1 · k 3 · koc - коэффициент передачи разомкнутой цепи САУ, а коэффициенты характеристического полинома a 0 , a 1, a 2, a 3 рассчитываются по выражениям:
![]()
![]()
![]()
![]()
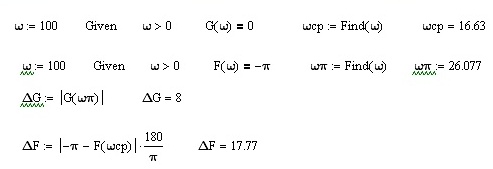
3. Определение устойчивости и расчет граничных параметров
В соответствии с критерием Гурвица для устойчивости САУ необходимо, чтобы главный минор определителя Гурвица, составленного из коэффициентов характеристического полинома, был больше нуля, то есть для САУ третьего порядка ![]()
Коэффициенты характеристического полинома САУ
Kp = k 1 · k 3 · koc ,
![]()
![]()
![]()
![]()
Главный минор определителя Гурвица
![]()
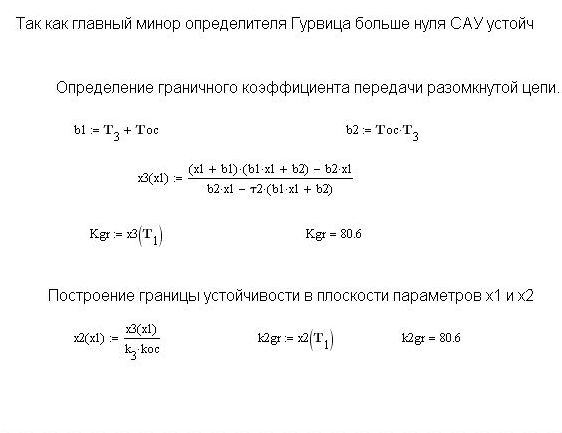
Так как главный минор определителя Гурвица больше нуля - САУ устойчива.
Для расчета граничного значения коэффициента передачи разомкнутой цепи и построения области устойчивости для параметров ![]() произведем замену в коэффициентах характеристического полинома фиксированных параметров
произведем замену в коэффициентах характеристического полинома фиксированных параметров ![]() и
и ![]() на варьируемые, введя при этом новую переменную
на варьируемые, введя при этом новую переменную ![]() то есть
то есть
![]()
![]()
![]()
![]()
![]()
![]()
Согласно критерию Гурвица, на границе устойчивости главный минор определителя Гурвица равен нулю, то есть требуется решить уравнение
![]()
или
![]()
отсюда
![]()
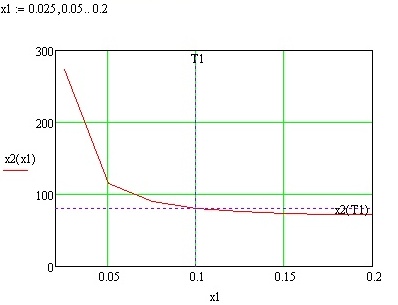
Полученное выражение отображает границу устойчивости САУ на плоскости параметров ![]() . При этом значение
. При этом значение ![]() определится как частное решение
определится как частное решение ![]() , а граница устойчивости в плоскости параметров
, а граница устойчивости в плоскости параметров ![]() находится простым пересчетом по формуле
находится простым пересчетом по формуле ![]() и может быть построена путем задания изменения
и может быть построена путем задания изменения ![]() в окрестности постоянной времени
в окрестности постоянной времени ![]()
Приведем описанную выше расчетную часть данного пункта, реализующуюся посредством программного продукта MathCad.
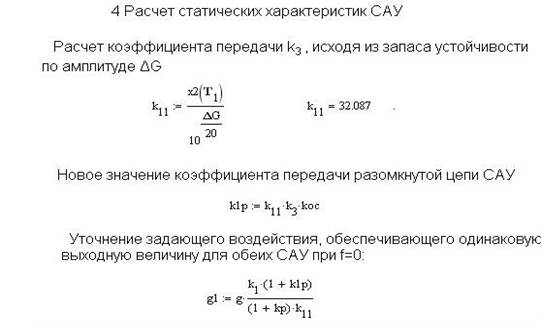
4. Расчет статических характеристик САУ
Значение коэффициента передачи ![]() для заданного запаса устойчивости по амплитуде
для заданного запаса устойчивости по амплитуде ![]() может быть рассчитано по формуле:
может быть рассчитано по формуле:

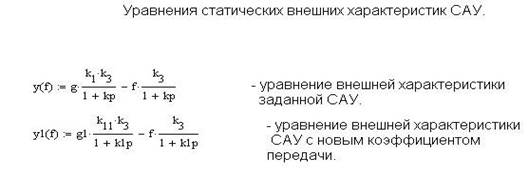
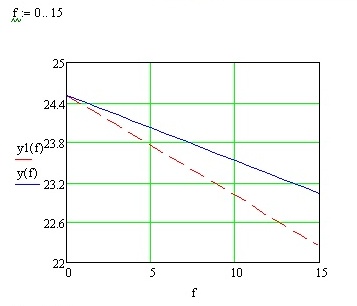
Внешняя характеристика САУ при изменении возмущающего воздействия от нуля до f
m
рассчитывается по передаточным функциям замкнутой САУ при ![]() то есть по формуле
то есть по формуле
![]()
Приведем расчетную часть данного пункта, реализующуюся посредством программного продукта MathCad. Здесь также рассчитано новое значение задающего воздействия обеспечивающее такое же значение выходной величины, что и в заданной САУ, при ![]()
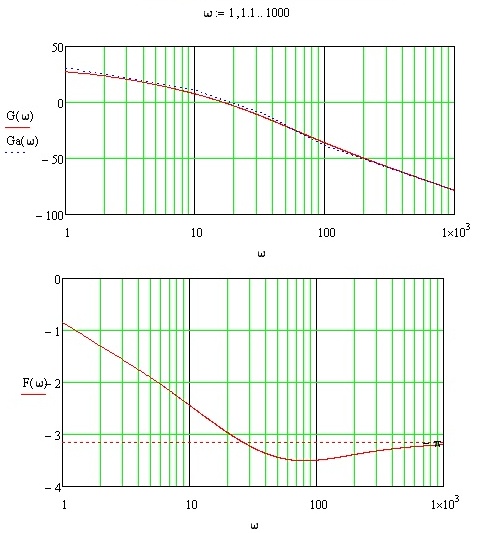
5. Расчет логарифмических характеристик САУ
Асимптотическая ЛАЧХ разомкнутой цепи САУ строится путем суммирования асимптотических ЛАЧХ ее звеньев. Общая формула для расчета асимптотической ЛАЧХ инерционного, форсирующего и колебательного звеньев в пакете MathCad осуществляется с помощью условного оператора if и имеет вид

Т -постоянная времени звена,
А -коэффициент наклона ЛАЧХ.
Для дифференцирующего и интегрирующего звеньев (при единичном коэффициенте передаче) приведенное выражение будет иметь вид
![]()
![]()
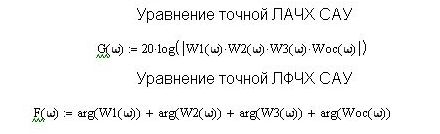
Точная ЛАЧХ САУ рассчитывается по формуле
![]()
Точная ЛФЧХ рассчитывается как сумма аргументов от АФЧХ звеньев, составляющих САУ, то есть
k – номер звена,
n – общее количество звеньев в САУ.
Реализация данного пункта курсовой работы приведена ниже.
 |
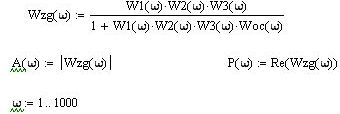
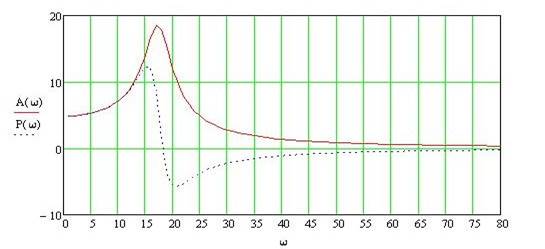
6. Расчет частотных характеристик замкнутой САУ и определение показателей качества регулирования
Амплитудная (АЧХ) и вещественная(ВЧХ) частотные характеристики замкнутой САУ рассчитываются по передаточной функции замкнутой САУ по задающему воздействию путем замены в ней оператора p на оператор jω
и определения модуля и вещественной части от АФЧХ W
(
jω
)
. Частота собственных колебаний в переходной характеристике будет соответствовать частоте максимума АЧХ Pmax
, показатель колебательности – отношению ![]() . Перерегулирование определяется из ВЧХ по формуле
. Перерегулирование определяется из ВЧХ по формуле
![]()
Реализация данного пункта курсовой работы в системе MathCad приведена ниже.

7. Расчет переходных характеристик замкнутой САУ
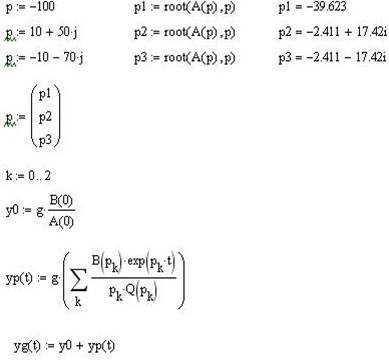
Для расчета переходных характеристик САУ наиболее целесообразным является использование формулы разложения для простых и одного нулевого полюсов изображения выходной величины y
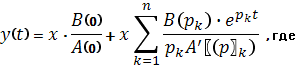
х – величина входного воздействия,
В(р) – числитель передаточной функции,
А(р) – знаменатель передаточной функции (характеристический полином),
А
![]() (р)
– производная характеристического полинома,
(р)
– производная характеристического полинома,
![]() – k-тый полюс передаточной функции (корень характеристического полинома),
– k-тый полюс передаточной функции (корень характеристического полинома),
n - число полюсов передаточной функции (корней характеристического полинома).
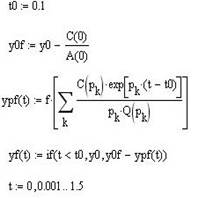
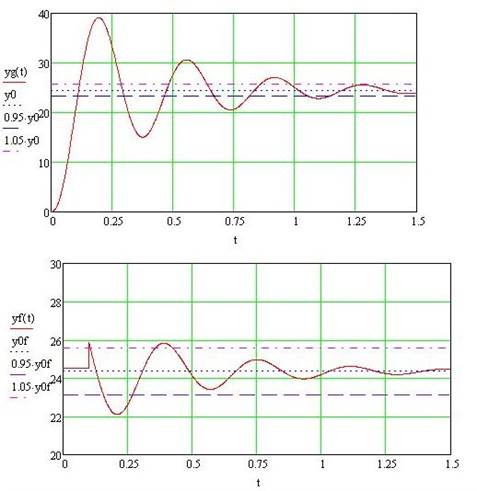
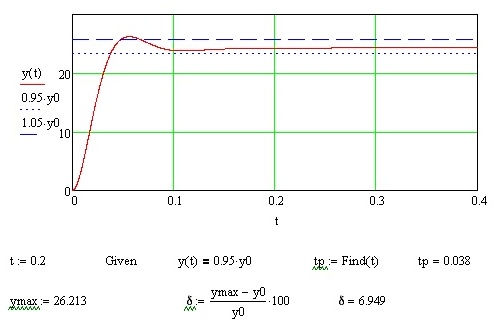
Реализация данного пункта задания курсовой работы в пакете MathCad приведена ниже. Здесь корни характеристического полинома находятся путем трехкратного применения функции root при различных приближениях. Затем из корней формируется вектор p и используется приведенная формула разложения в ее векторном варианте.
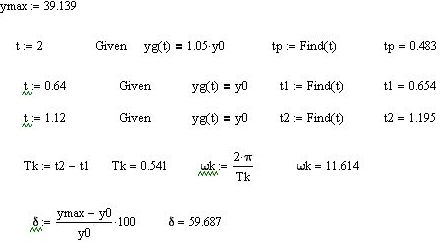
Показатели качества переходных процессов находятся непосредственно из рассчитанных характеристик; перерегулирование рассчитывается, исходя из максимального y max и установившегося y 0 значений выходной переменной, а время переходного процесса – путем решения уравнений y ( t ) =0,95· y 0 или y ( t ) =1,05· y 0 .

 |
 |
8. Синтез последовательного корректирующего устройства
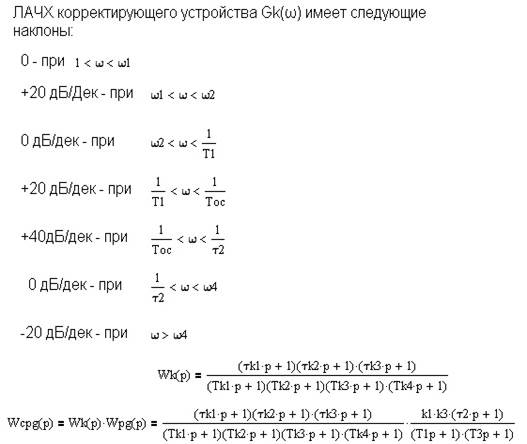
Синтез последовательного корректирующего устройства наиболее просто провести по логарифмическим частотным характеристикам. В соответствии с этим методом ЛАЧХ корректирующего устройства:
![]()
Желаемая ЛАЧХ может быть построена на основе номограмм Солодовникова. При этом выделяются три частотных области: низкочастотная, среднечастотная, высокочастотная.
Ниже приведен фрагмент расчетного файла, реализующий данный пункт курсовой работы в среде MathCad.


![]()

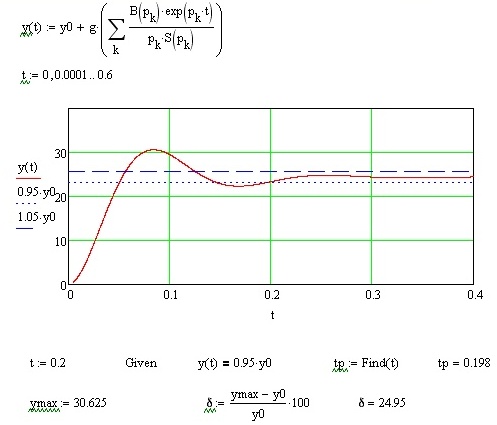
В рассчитанном варианте показатели качества регулирования хуже, чем заданные. Достижения заданного уровня показателей качества можно достигнуть путем увеличения частот ω3 и ω4 . Например, при ω3 =230 и ω4 =390 удается получить значения δ=24,95 и t пп =0,198.
Ниже приведен фрагмент расчетного файла в программном продукте MathCad, подтверждающий этот факт.
 |
Заключение
Таким образом, полученные нами в ходе данной курсовой работы показатели качества регулирования САУ путем введения в систему последовательного корректирующего устройства близки к заданным и качественно в несколько раз выше показателей исходной САУ.
Следует сделать несколько замечаний:
1) при рассматриваемом способе формирования желаемой ЛАЧХ крайне редко удается выполнить требования одновременно по двум параметрам tпп и δ;
2) рассмотренный способ коррекции САУ позволяет обеспечить заданное перерегулирование только тогда, когда постоянная времени τ2 второго звена много больше постоянных времени других звеньев САУ. Если это условие не выполняется, то перерегулирование может получиться очень большим;
3) увеличение порядка системы (в рассмотренном варианте он равен четырем) не влияет на обеспечение требуемых показателей качества регулирования для скорректированной САУ.
Список использованных источников
1. Дьяконов В.П. Система Mathcad: Справочник.- М.: Радио и связь, 1993.- 128 с.
2. Макаров И.М., Менский Б.М.Линейные автоматические системы. М.: Машиностроение,1982.- 504 с.
3. Попов Е.П.Теория линейных систем автоматического управления и регулирования – М.: Наука, ГРФМЛ,1989. – 304 с.
4. Очков В.Ф.Mathcad Plus 6.0 для студентов и инженеров.- М.: Компьютер Пресс,1996. – 238 с.
5. Лебедев Ю.М. Теория автоматического управления. Система Mathcad и ее применение для расчетов. - Томск, 1996. – 71 с.