| Скачать .docx |
Реферат: Контрольная работа: Применение контроля информационных слов и их адресов по mod 3 в цифровых устройствах автоматики
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Московский государственный текстильный университет
им. А.Н.Косыгина
Кафедра информационных технологий и САПР
Кафедра автоматики и промышленной электроники
Научно-исследовательская работа
«Применение контроля информационных слов и их адресов по mod 3 в цифровых устройствах автоматики»
Выполнили:
0000000000000000
ФИТАЭ, гр. 38-03.
Проверил:
Москва 2007
К вопросу о достоверности информации:
«В музее хранилось два черепа Христофора Колумба - один в молодом, другой в зрелом возрасте».
Марк Твен.
Аннотация
В данной работе приведены способы контроля информационных слов и их адресов в цифровых устройствах автоматики.
Рассматриваемые методы контроля: метод сравнения с эталоном; метод контрольного суммирования; контроль по mod 3.
Представлены структурные и функциональные схемы контролирующих устройств, а также схемы свертки, сумматоров и умножителей по модулю. Рассмотрены алгоритмы контроля операций, математические основы контроля носителя информации.
В работе поднят вопрос обеспечения надежности устройств автоматики и вычислительной техники.
Приведены принципы числового аппаратурного контроля по модулю и социально-экономическое обоснование использования аппаратурного контроля.
The summary
In the given work ways of the control of information words and their addresses in digital devices of automatics are resulted.
Considered quality monitoring: a method of comparison with the standard; a method of control summation; the control on mod 3.
Schemes of convolution, adders and multipliers on the module are presented structural and function charts of supervising devices, and also. Algorithms of the control of operations, mathematical bases of the control of a data carrier are considered.
In work the question of maintenance of reliability of devices of automatics and computer facilities is lifted.
Principles of the numerical hardware control over the module and social and economic substantiation of use of the hardware control are resulted.
Содержание
Введение
Общая характеристика аппаратурного контроля
Числовой аппаратурный контроль по модулю
Узлы свертки, сумматоры и умножители по модулю
Алгоритмы контроля операций
Функциональные схемы контролирующих устройств
Математические основы контроля носителя информации
Оценка эффективности контроля по модулю
Обеспечение надежности устройств автоматики и вычислительной
техники
Социально-экономическое обоснование использования аппаратурного контроля
Приложение
Выводы
Список используемой литературы
Введение
В работе нами рассматриваются способы контроля информационных слов и их адресов в цифровых устройствах автоматики.
Одним из методов контроля является метод контрольного суммирования. Существо этого метода заключается в том, что каждому массиву информационных или кодовых слов соответствует контрольная сумма, получаемая тем или иным способом и сравниваемая с заранее известной эталонной суммой. Метод контрольного суммирования выгодно использовать при контроле больших массивов информационных или кодовых слов, что, однако, не исключает его применения при проверке жгутов кодовых проводов и МЭСБ ДЗУ-8.
Другим методом проверки жгутов кодовых проводов и МЭСБ ДЗУ-8 с точки зрения максимальной вероятности обнаружения ошибки является метод сравнения с эталоном. Однако, при контроле методом сравнения с эталоном необходимы исправные и проверенные на достоверность информации жгуты кодовых проводов и МЭСБ ДЗУ -8.
Еще один способ - контроль по mod 3. При контроле по mod 3 проверяемый узел контролируется независимой схемой, использующей контрольные символы, являющиеся остатками от деления информационных слов на mod 3 .
В отличие от контрольного суммирования, которое фиксирует сам факт неисправности или ошибки при считывании определенного массива информационных или кодовых слов, но не указывает место неисправности, контроль по mod 3 указывает адрес, по которому произошла ошибка или возникла неисправность.
Аппаратурный контроль
Общая характеристика аппаратурного контроля
Аппаратурный контроль используется для определения факта неверной работы отдельных цифровых узлов и устройств ЭВМ. Он позволяет достаточно эффективно проверять правильность функционирования этих узлов и устройств, как при выполнении отдельных элементарных операций, так и при выполнении последовательностей операций.
При аппаратурном контроле в состав узла или устройства вводится избыточная (контрольная) аппаратура, которая функционирует одновременно с основной аппаратурой. Сигналы, возникающие в процессе функционирования основной и контрольной аппаратуры, по определенным законам сопоставляются между собой. В результате этого сопоставления вырабатывается информация о правильности функционирования контролируемого узла (устройства).
Функциональный узел А устройства в общем виде может быть представлен конечным автоматом, содержащим однотактный логический преобразователь ЛП с f входами, w выходами и z обратными связями, в каждой из которых размещен двухпозиционный элемент памяти ЭП (рис. 1.1). Контрольное устройство тоже может быть представлено в виде некоторого конечного автомата В.
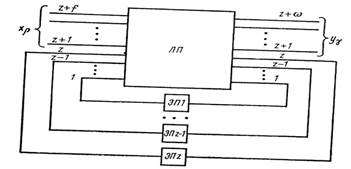
Рис. 1.1
В общем виде модель функционального узла (устройства) с системой аппаратурного контроля представлена на рис. 1.2. Здесь A и B - основной и контрольный автоматы; D - узел сопоставления.
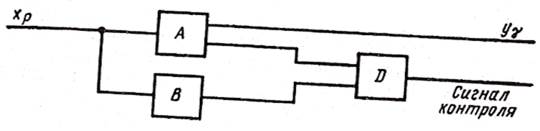
Рис. 1.2
Исходя из способов задания конечных автоматов, можно представить себе следующие методы сопоставления процессов функционирования основного А и контрольного В автоматов:
- сопоставление внутренних состояний автоматов А и В;
- сопоставление выходных слов автоматов А и В;
- сопоставление переходов из одного состояния в другое автоматов А и В.
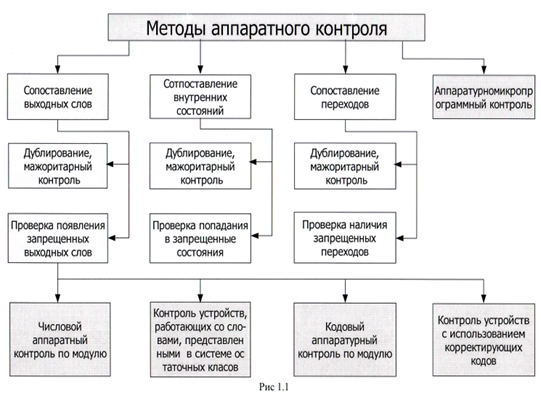
Выбрав в качестве признака контрольные соотношения, положенные в основу построения автомата В и узла сопоставления D, можно произвести классификацию методов аппаратурного контроля (рис. 1.3).
Наиболее простым способом контроля для всех трех методов сопоставления является дублирование . В этом случае автомат В идентичен автомату А, их входы объединены и оба они работают от единой системы синхронизации. Сопоставление процессов их работы производится сравнением одинаковых сигналов на выходе либо в различных внутренних точках этих автоматов (рис. 1.4).
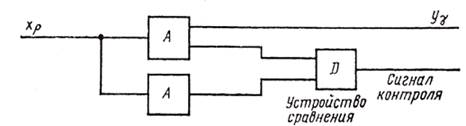
Рис. 1.4
Мажоритарные способы контроля заключаются в параллельной работе нечетного (не менее трех) количества узлов (устройств) и сравнении по определенным правилам сигналов при их функционировании. Эти способы применяются для контроля наиболее ответственных узлов и устройств в тех случаях, когда другие способы применить трудно. Основной их недостаток заключается в очень большом количестве контрольной аппаратуры.
Наиболее распространены на практике способы, основанные на сопоставлении выходных сигналов .
Прежде всего, это числовой контроль по модулю , широко используемый в устройствах переработки цифровой информации. В этом случае автомат А представляет собой устройство, выполняющее арифметические операции (сложение, вычитание, умножение и т. д.). Автомат В выполняет операции над контрольными словами, которые являются наименьшими остатками от деления этих чисел на некоторый модуль контроля — вычетами. Результаты выполнения операций сравниваются по модулю. При их совпадении считается, что операция выполнена правильно. На рис. 1.5 представлена структурная схема узла (устройства), контролируемого по модулю.
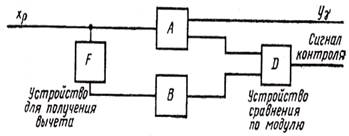
Рис. 1.5
Дальнейшим развитием числового контроля по модулю является контроль с использованием арифметических корректирующих кодов . При этом способе контроля используется несколько контрольных автоматов, которые выполняют операции над вычетами по различным модулям. На основе анализа выходных слов контрольных автоматов имеется возможность найти и исправить ошибку в выходном слове автомата А. Исправление осуществляет корректор, на вход которого подаются результаты сравнения выходных слов основного и контрольного автоматов по выбранным модулям. Структурная схема арифметического автомата с контролем по трем различным модулям представлена на рис. 1.6.
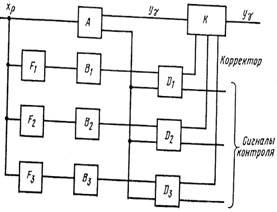
Рис. 1.6
Развитием и углублением идей, положенных в основу аппаратурного контроля по модулю, является контроль устройств , работающих со словами , представленными в системе счисления остаточных классов . Общие принципы построения контролирующих устройств остаются здесь те же, что и при контроле по модулю. Однако специфика представления чисел в системе счисления остаточных классов приводит к ряду особенностей методов обнаружения и исправления ошибок, а также построения контролирующих устройств.
На практике получил также распространение кодовый контроль по модулю . Он отличается от числового тем, что в качестве контрольных слов используются остатки от деления суммы цифр данного слова на выбранный модуль контроля. Наиболее распространенным вариантом этого вида контроля является контроль на четность (нечетность).
При передаче и хранении информации применяется также контроль с использованием корректирующих кодов (коды Хэмминга, циклические коды и т. д.). Автомат А в этом случае информацию не перерабатывает. Следовательно, процесс контроля сводится здесь к формированию специальных контрольных слов на входе автомата В и проверке соответствия выходных слов автоматов А и В. Контрольные соотношения, возникающие в результате применения корректирующих кодов, позволяют не только обнаруживать искажения информации, но и исправлять возникшие ошибки. Для этой цели используется корректор. Структурная схема узла (устройства), контролируемого с использованием корректирующих кодов, представлена на рис. 1.7.
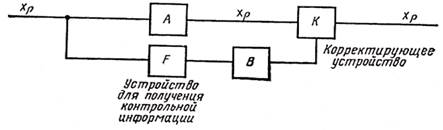
Рис. 1.7
Применяют еще один способ контроля, использующий искусственно введенную в узлы и устройства аппаратурную избыточность , что приводит к возникновению большого количества таких состояний, которые при нормальной работе не используются (запрещенные). Структура устройства (узла) выбирается так, чтобы при появлении ошибок с большей вероятностью происходил переход в запрещенные состояния. Для определения факта попадания устройства в одно из запрещенных состояний должен быть предусмотрен отдельный узел (рис. 1.8). Аналогичную проверку можно осуществить как по запрещенным выходным словам, так и по запрещенным переходам.

Рис. 1.8
Несколько в стороне по своим принципам стоит аппаратурно-микропрограммный (или аппаратурно-микрооперационный) контроль . Суть его заключается в том, что в отдельные временные интервалы, когда узел (устройство) простаивает, производится проверка работоспособности этого узла по заранее составленной или формируемой в процессе контроля программе. Следовательно, собственно контроль здесь осуществляется программным способом. Задача контрольной аппаратуры состоит в обнаружении моментов простоя аппаратуры, подаче на вход узла контролирующей последовательности слов (или формирование этой последовательности), переключении узла из режима контроля в режим нормальной работы. Этот вид контроля требует небольшого количества добавочной аппаратуры, однако он не позволяет контролировать процесс переработки информации. С его помощью можно проверить лишь работоспособность аппаратуры на момент контроля.
Структура контрольных устройств и эффективность аппаратурного контроля зависят от большого количества факторов, и, в первую очередь, от способа кодирования входных слов, как основного, так и контрольного автоматов. Поэтому, рассматривая ниже различные варианты аппаратурного контроля, будем начинать изложение с описания способов кодирования входных слов автоматов А и В.
Числовой аппаратурный контроль по модулю
Принципы числового аппаратурного контроля по модулю.
Рассмотрим способы кодирования информации при числовом аппаратурном контроле по модулю.
Любое целое число можно представить в виде:
A = qa + ra ,
где A, q, а и r а — целые числа;
q — модуль;
a=A/q —наибольшая целая часть частного;
r а — остаток (вычет) от деления числа А на модуль q.
Остаток r а для различных чисел может принимать значения ra =0, 1, 2,...,q-l. Таким образом, каждому целому числу А можно поставить в соответствие остаток r а , полученный в результате деления этого числа на некоторый модуль q. Это соответствие записывается в виде:
А = ra mod q
Читается: число А сравнимо с остатком r а по модулю q.
С каждым остатком по модулю q сравнимо некоторое множество чисел.- Все они называются сравнимыми между собой по модулю q и составляют остаточный класс чисел, сравнимых по модулю q. Очевидно, количество остаточных классов для каждого модуля равно q-1. Разбив все кодовые слова на классы, можно параллельно с основной операцией в контролируемом устройстве выполнять в контролирующем устройстве аналогичную операцию над их остатками. Результаты, полученные в этих устройствах, будут также принадлежать к одному классу.
Действительно, сумма чисел сравнима по модулю q с суммой остатков данных чисел по этому же модулю, т. е.
![]() ,
,
а произведение чисел сравнимо по модулю q с произведением остатков этих чисел по этому же модулю, т. е.
![]()
Приведенные соотношения лежат в основе числового контроля по модулю.
Укажем теперь последовательность выполнения контрольных операций при сложении и умножении (рис. 1.9).
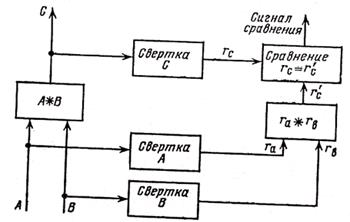
Рис. 1.9
От кодовых слов, представляющих числа А и В, образуются остатки r а и r ь по выбранному модулю контроля q.
Процесс образования остатков носит название свертки числа , а соответствующий узел называется узлом свертки .
Параллельно с основной операцией (обозначим ее *) над словами А и В в контролирующем устройстве выполняется аналогичная операция над остатками r а и r ь . Затем результат операции С сворачивается и величина r с сравнивается с результатом r 'с , полученным в контрольном устройстве. Совпадение r с и r 'с свидетельствует о правильном выполнении операции.
Из самого принципа контроля следует, что его наиболее целесообразно применять в устройствах, перерабатывающих цифровую информацию. Числовой контроль по модулю хорошо приспособлен к проверке правильности выполнения арифметических операций (сложение, вычитание, умножение), а с использованием искусственных приемов он может применяться для контроля и других операций. С его помощью можно также контролировать правильность хранения и пересылки информации.
Объектами контроля являются сумматоры, счетчики, сдвигатели, арифметические устройства и т. д. Контроль производится путем сопоставления (по модулю) выходных слов контролируемого и контролирующего узлов.
Во многих случаях, в частности в ЭВМ, организуется сквозной контроль по модулю. Каждое кодовое слово содержит дополнительные разряды, в которые заблаговременно записывается контрольная характеристика, представляющая собой закодированный остаток по выбранному модулю контроля. В этом случае непосредственно перед выполнением операции не потребуется формировать остатки r а и r ь и время выполнения контрольных операций сократится.
Нулевой остаток всегда сравним с самим модулем, т. е.
![]() .
.
Этот факт можно использовать для повышения эффективности контроля. Если в качестве нулевого остатка всегда выбирать только q, то наличие нуля в контрольных разрядах будет свидетельствовать о возникновении ошибки, что может быть зафиксировано специальным узлом анализа.
Таким образом, в состав контролирующего устройства должны входить специфические узлы, предназначенные для получения контрольных характеристик и выполнения операций над ними.
Узлы свертки, сумматоры и умножители по модулю.
Узлы свертки предназначены для получения остатка от деления числа на модуль контроля q. Эта операция выполняется суммированием цифр разрядов числа по модулю q. Поясним, почему это возможно.
Представим двоичное число ![]() в виде:
в виде:
![]() .
.
Разделив A на q, получим:
![]() .
.
Так как для получения остатка все операции в этом выражении выполняются по модулю q, то сомножители 2 i / q можно заменить соответствующими остатками ri , которые называются весовыми коэффициентами. Тогда остаток ra можно вычислить по формуле:
![]() .
.
Следовательно, процесс получения остатка числа по модулю q сводится к суммированию по модулю q содержимого всех разрядов числа с учетом весовых коэффициентов. Значения весовых коэффициентов ri легко определяются делением 2 i / q .
Весовые коэффициенты являются периодической функцией номера разряда. Это позволяет упростить операцию свертки, так как она разбивается на ряд однотипных действий. Особенно просто свертка осуществляется при модулях 3, 7, 15, ..., так как значения весовых коэффициентов внутри периода (по группам) совпадают с весами разрядов числа, записанного в двоичной системе счисления.
Существует много разновидностей узлов свертки. Рассмотрим наиболее характерные из них.
Последовательная схема свертки (рис. 1.10) содержит один одноразрядный сумматор и два регистра со сдвигом: РгА — для хранения свертываемого числа А и Ргrа — для хранения промежуточных и окончательных результатов.
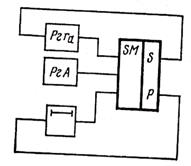
Рис. 1.10
Операция свертки здесь производится путем последовательного суммирования разрядов числа А с содержимым регистра Ргrа . Перенос, возникающий при суммировании старшего разряда Ргrа , через элемент задержки поступает в младший разряд. Схема проста и требует малого количества оборудования, которое практически не зависит от величины модуля. Недостаток ее состоит в большом времени сворачивания.
Параллельная (пирамидальная) схема свертки , построенная на одноразрядных сумматорах, имеет многоярусную структуру. В каждом ярусе отдельные сумматоры суммируют цифры сворачиваемого числа с одинаковым весом. Достоинством схемы является однотипность ее элементов и малое время выполнения операции сворачивания. Недостаток - большое количество оборудования.
Возможно использование комбинированных схем свертки , когда на параллельный малоразрядный сумматор последовательно подаются группы цифр сворачиваемого числа. По количеству оборудования и времени сворачивания такая схема занимает промежуточное положение между двумя предыдущими.
Сумматор по модулю ![]() строится из одноразрядных сумматоров как обычный m-разрядный сумматор, причем он должен иметь цепь циклического переноса из старшего разряда в младший. На рис. 1.11 показана схема сумматора
по модулю 3
. Здесь же обозначены веса цифр слагаемых и суммы.
строится из одноразрядных сумматоров как обычный m-разрядный сумматор, причем он должен иметь цепь циклического переноса из старшего разряда в младший. На рис. 1.11 показана схема сумматора
по модулю 3
. Здесь же обозначены веса цифр слагаемых и суммы.
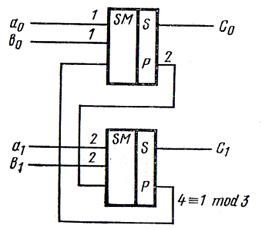
Рис. 1.11
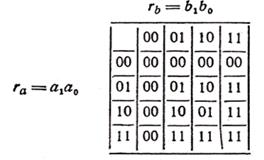
Табличные сумматоры непосредственно реализуют таблицу сложения по модулю. В таблице 1 представлены условия работы сумматора по модулю 3, т. е. значения цифр разрядов r с при различных комбинациях цифр r а и r ь . Значения r с полагаются равными нулю в том случае, если хотя бы одно из слагаемых r а или r ь равно нулю. При этом, как было сказано выше, анализируя r с , можно выявить некоторые ошибки в работе самих схем контроля.
Логика работы табличного сумматора и его структура полностью определяется таблицей 1 (рис. 1.12). Пунктиром обведена схема, выявляющая наличие запрещенной нулевой контрольной характеристики.
Таблица 1
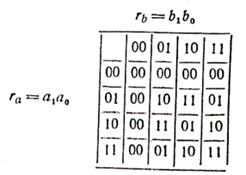
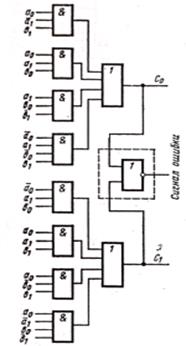
Рис. 1.12
Рассмотрим другой распространенный вариант табличных сумматоров, который получил название матричного . Поясним принцип их построения на примере сумматора по модулю 3 (рис. 1.13).
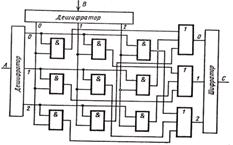
Рис. 1.13
Числа А и В расшифровываются и переводятся в однопозиционную систему счисления (возбуждение одной шины дешифратора соответствует одному числу). В матрице элементов И срабатывает один из элементов, и сигнал через элемент ИЛИ поступает на шифратор. На выходе шифратора получают число C = ( A + B ) mod 3, закодированное в двоичной системе счисления.
Умножители по модулю служат для получения произведения остатков по модулю. Умножение контрольных характеристик можно выполнить с помощью сумматора путем многократного сложения сдвинутых множимых. Однако в этом случае умножение займет много времени. На практике используются табличные умножители, обеспечивающие при малом количестве оборудования малое время выполнения операции. Эти умножители непосредственно реализуют таблицу умножения по модулю.
Условия работы умножителя по модулю 3 представлены в таблице 2.
Таблица 2
На основании этой таблицы строится схема табличного умножителя (рис. 1.14).
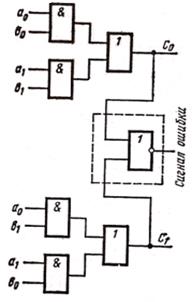
Рис 1.14
Аналогичным образом могут быть построены сумматоры и умножители и по любому другому модулю.
Алгоритмы контроля операций
Рассмотрим принципы построения алгоритмов основных контрольных операций для абсолютных значений чисел, участвующих в операции.
Правильность выполнения сложения и вычитания ![]() контролируется соотношениями:
контролируется соотношениями:
![]() ,
, ![]() .
.
Алгоритм контроля состоит в сложении (вычитании) контрольных характеристик чисел А
и В,
а затем в сравнении суммы (разности) с суммой чисел ![]() по модулю q
.
по модулю q
.
Контрольное соотношение для операции умножения ![]() имеет вид:
имеет вид:
![]() .
.
Однако это соотношение справедливо, когда не происходит потери разрядов произведения при их выходе за пределы разрядной сетки. Если эту потерю учесть, то получим:
![]() ,
,
где ![]() — остаток от значения разрядов, отбрасываемых при округлении.
— остаток от значения разрядов, отбрасываемых при округлении.
Следовательно, для контроля операции умножения необходимо:
- произвести умножение по модулю q контрольных характеристик r а и rb ;
- сформировать из отбрасываемых разрядов Е
контрольную характеристику ![]() ;
;
- вычесть по модулю q
из произведения ![]() величину
величину ![]() ;
;
- сравнить по модулю q
полученный результат с величиной ![]() .
.
Для контроля операции деления ![]() используются соотношения:
используются соотношения:
![]() ;
; ![]() ,
,
где А — делимое; В — делитель; Z — частное; W — остаток от деления А на В, откуда следует контрольное соотношение:
![]() .
.
Следовательно, контроль операции деления состоит в следующем:
- получить от частного Z и остатка W контрольные характеристики rz и rw ;
- произвести умножение r а и rb по модулю q ;
- сложить полученное произведение по модулю q с rw ;
- сравнить полученную сумму ![]() с контрольной характеристикой делимого r
а
.
с контрольной характеристикой делимого r
а
.
В зависимости от количества разрядов, формы представления числа, способа выполнения основной операции над числами приведенные выше алгоритмы могут несколько видоизмениться, однако принципы их построения остаются неизменными.
Рассмотрим принципы построения алгоритма контроля следующих логических операций:
— поразрядного логического сложения C = A V B ;
— поразрядного логического умножения С= A ^ B ;
—поразрядного сложения по модулю 2 ![]() .
.
Используя соотношения:
![]() ,
, ![]() ,
,
после преобразований и перехода к остаткам, можно получить контрольные соотношения:
для операции поразрядного логического сложения
![]() ;
;
для операции поразрядного логического умножения
![]() ;
;
для операции поразрядного сложения по mod 2
![]() .
.
Здесь ![]() ,
, ![]() ,
, ![]() —
контрольные характеристики результата операции логического сложения (V), логического умножения (^), сложения по модулю 2(
—
контрольные характеристики результата операции логического сложения (V), логического умножения (^), сложения по модулю 2(![]() ) соответственно.
) соответственно.
Аналогичным образом получаются алгоритмы операций сдвига, инвертирования, пересылок и т. д.
Функциональные схемы контролирующих устройств
Функциональные схемы контролирующих устройств создаются на основе алгоритмов контроля операций.
Покажем, как строятся функциональные схемы устройств для контроля счетчика, множительного и делительного устройств.
Схема контроля счетчика представлена на рис. 1.15. Она имеет в своем составе счетчик по модулю q, узел свертки и узел сравнения. В каждом такте (после поступления одного импульса) или периодически через несколько тактов содержимое основного счетчика сворачивается и величина r
сч
сравнивается с содержимым контрольного счетчика r
’сч
. Если ![]() , то вырабатывается сигнал ошибки.
, то вырабатывается сигнал ошибки.
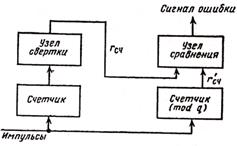
Рис. 1.15
Схема для контроля множительного устройства представлена на рис. 1.16. Работа устройства заключается в следующем. Одновременно с поступлением чисел A и B на регистры Рг1 и Рг2 поступают контрольные характеристики ra и rb , которые перемножаются по модулю q, и величина r а * rb mod q пересылается с регистра Рг3 на регистрРг2.
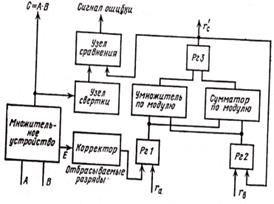
Рис. 1.16
По мере выполнения операции умножения в основном множительном устройстве младшие отбрасываемые цифры произведения через корректор записываются в разряды регистра Pг1. Корректор служит для инвертирования отбрасываемых цифр произведения, а также распределения их в соответствии с весами по разрядам регистра Pгl. Инвертирование позволяет вместо операции вычитания r
Е
при получении величины r
'с
выполнить операцию сложения с величиной ![]() .
Распределение же отбрасываемых цифр по разрядам Pгl нужно для того, чтобы каждая цифра попала в тот разряд регистра Pгl, который соответствует ее весу. Каждый раз после того, как разряды Pгl будут полностью заполнены, его содержимое суммируется по модулю с записанной на регистре Рг2 величиной r
а
*
rb
mod
q
. Полученная величина через регистр Рг3 вновь записывается на регистр Рг2.
.
Распределение же отбрасываемых цифр по разрядам Pгl нужно для того, чтобы каждая цифра попала в тот разряд регистра Pгl, который соответствует ее весу. Каждый раз после того, как разряды Pгl будут полностью заполнены, его содержимое суммируется по модулю с записанной на регистре Рг2 величиной r
а
*
rb
mod
q
. Полученная величина через регистр Рг3 вновь записывается на регистр Рг2.
Так по мере выхода отбрасываемых разрядов произведения за пределы разрядной сетки множительного устройства происходит постепенная корректировка величины r 'с . После завершения операции умножения на регистре Рг3 будет записана скорректированная величина r 'с .
Произведение С=А*В сворачивается и сравнивается с величиной r 'с . При их несовпадении выдается сигнал ошибки.
Вариант схемы устройства для контроля работы делительного устройства представлен на рис. 1.17. Работа устройства происходит в следующем порядке. Одновременно с поступлением чисел A и B в делительное устройство на регистры Рг2 и Рг4 поступают их контрольные характеристики ra
и rb
. После выполнения операции деления частное Z и остаток W последовательно одно за другим сворачиваются и их контрольные характеристики записываются на регистры Рг3 и Рг1 соответственно. Затем с помощью умножителя и сумматора по модулю получают величину ![]() , которая поступает на регистр Рг5. После этого на схеме сравнения проверяется выполнение условия ra
=
r
’
a
. Если условие не выполняется, то вырабатывается сигнал ошибки.
, которая поступает на регистр Рг5. После этого на схеме сравнения проверяется выполнение условия ra
=
r
’
a
. Если условие не выполняется, то вырабатывается сигнал ошибки.
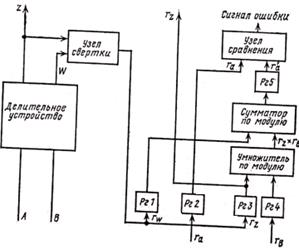
Рис. 1.17
Наиболее широко числовой контроль по модулю применяется в цифровых вычислительных машинах. Здесь для контроля работы арифметических устройств используются так называемые контрольные арифметические устройства. В их состав входит несколько регистров, сумматор и умножитель по модулю, схемы свертки и сравнения, а также ряд вспомогательных узлов (корректоры, счетчики и т. д.). Кроме того, имеется узел местного управления, при помощи которого реализуются соответствующие алгоритмы контроля.
Числовой аппаратурный контроль может производиться не только по одному модулю, а одновременно по нескольким модулям. При этом возникают новые возможности повышения эффективности контроля. В зависимости от величины выбранных модулей можно обеспечить не только определение факта появления ошибки в выходном слове контролируемого устройства, но и определить место (разряд) появления ошибки и ее знак. Следовательно, применение нескольких различных модулей для контроля позволяет в ряде случаев не только обнаруживать, но и автоматически исправлять некоторые ошибки в работе контролируемых устройств.
Так как ![]() - периодическая функция номера j разряда, то, используя один модуль, невозможно определить однозначно место ошибки. Однако применение для контроля нескольких модулей позволяет решить эту задачу. Коды, которые строятся на основе нескольких независимых модулей, носят название разделимых арифметических [
n
,
k
] кодов
.
- периодическая функция номера j разряда, то, используя один модуль, невозможно определить однозначно место ошибки. Однако применение для контроля нескольких модулей позволяет решить эту задачу. Коды, которые строятся на основе нескольких независимых модулей, носят название разделимых арифметических [
n
,
k
] кодов
.
Существенным недостатком аппаратурного контроля с исправлением ошибок является наличие большого количества контрольной аппаратуры. Поэтому аппаратурный контроль по модулю с исправлением ошибок находит применение только в особо ответственных устройствах и элементах больших систем.
Математические основы контроля носителя информации
Одним из очевидных методов проверки жгутов кодовых проводов и МЭСБ ДЗУ-8 с точки зрения максимальной вероятности обнаружения ошибки является метод сравнения с эталоном . Об этом свидетельствует формула вероятности обнаружения ошибки при использовании любого вида контроля:
![]() ,
,
где ![]() - число сочетаний из n no j;
- число сочетаний из n no j;
р - вероятность одной ошибки (ошибки кратности 1);
Pj - вероятность появления ошибки j-й кратности;
P ( Pnp / Pj )- условная вероятность пропуска ошибки данным методом контроля при условии, что ошибка j-й кратности появляется с вероятностью Pj .
Выражение ![]() является вероятностью пропуска ошибки при выбранном методе контроля.
является вероятностью пропуска ошибки при выбранном методе контроля.
Однако, при контроле методом сравнения с эталоном необходимы исправные и проверенные на достоверность информации жгуты кодовых проводов и МЭСБ ДЗУ-8.
Приемлемым для автомата проверки жгутов кодовых проводов и МЭСБ ДЗУ-8 был признан контроль по mod 3 , который не требовал большого объема контрольной аппаратуры и хорошо зарекомендовал себя при разработке и эксплуатации узлов, устройств и приборов ранее. При контроле по mod 3 проверяемый узел, в данном случае – жгут кодовых проводов, контролируется независимой схемой, использующей контрольные символы, являющиеся остатками от деления информационных слов на mod 3 .
Другим методом контроля, который хорошо зарекомендовал себя, является метод контрольного суммирования . Существо этого метода заключается в том, что каждому массиву информационных или кодовых слов соответствует контрольная сумма, получаемая тем или иным способом и сравниваемая с заранее известной эталонной суммой.
Эталонная сумма может храниться в проверяемом узле или вне его, например, в сопровождаемой документации или в специальном запоминающем устройстве (или любом носителе информации).
Однако контрольное суммирование фиксирует сам факт неисправности или ошибки при считывании определенного массива информационных или кодовых слов, но не указывает место неисправности. В отличие от контрольного суммирования, контроль по mod 3 указывает адрес, по которому произошла ошибка или возникла неисправность.
Метод контрольного суммирования выгодно использовать при контроле больших массивов информационных или кодовых слов, что, однако, не исключает его применения при проверке жгутов кодовых проводов и МЭСБ ДЗУ-8. Метод контрольного суммирования вместе с контролем по mod 3 применим также и в приборах, в которых используются МЭСБ ДЗУ-8.
Применение контрольного суммирования предполагает использование таблиц контрольных сумм для каждого массива информационных или кодовых слов, что при малых массивах информации приводит к большому объему вычислений и операций документирования.
Была произведена оценка вероятности обнаружения ошибки при контроле по mod 3.
Оценка эффективности контроля по модулю .
 - вероятность обнаружения ошибки или неисправности,
- вероятность обнаружения ошибки или неисправности,
где ![]() - вероятность появления в интервале между проверками обнаруживаемой ошибки в массиве
- вероятность появления в интервале между проверками обнаруживаемой ошибки в массиве ![]() (n- число разрядов, m – число слов массива);
(n- число разрядов, m – число слов массива);
![]() - вероятность появления ошибки (неисправности) в интервале между проверками, т.е. все ошибки – обнаруживаемые средствами контроля и необнаруживаемые;
- вероятность появления ошибки (неисправности) в интервале между проверками, т.е. все ошибки – обнаруживаемые средствами контроля и необнаруживаемые;
Выразим ![]() и
и ![]() . Пусть:
. Пусть:
![]() - вероятность появления обнаруживаемой ошибки любой кратности в одном слове разрядности n;
- вероятность появления обнаруживаемой ошибки любой кратности в одном слове разрядности n;
![]() - вероятность необнаружения ошибки любой кратности;
- вероятность необнаружения ошибки любой кратности;
![]() - вероятность необнаружения ошибки любой кратности во всех словах массива из m слов.
- вероятность необнаружения ошибки любой кратности во всех словах массива из m слов.
Тогда
![]() - вероятность появления в интервале между проверками обнаруживаемых ошибок любой кратности среди всех слов массива.
- вероятность появления в интервале между проверками обнаруживаемых ошибок любой кратности среди всех слов массива.
Определение вероятности ![]() :
:
![]() ,
,
где ![]() - вероятность появления k-кратной ошибки (неисправности).
- вероятность появления k-кратной ошибки (неисправности).
Применим биномиальный закон распределения случайной величины. Тогда, если q – вероятность появления ошибки в одном разряде слова, то получим:
![]() - для ошибки кратности k.
- для ошибки кратности k.
В свою очередь, с учетом всех ошибок получим:
![]() .
.
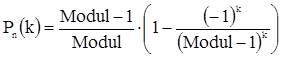
Осталось определить ![]() - вероятность обнаружения k-кратной ошибки средствами контроля по модулю Modul программным или аппаратным способом.
- вероятность обнаружения k-кратной ошибки средствами контроля по модулю Modul программным или аппаратным способом.
Примем во внимание, что кратность ошибки изменяется от 1 до n, т.е. k=1,2,…,n и что
 .
.
Тогда
 -
-
вероятность появления обнаруживаемой ошибки любой кратности в одном слове.
Подставим полученные выражения в формулу:
![]()
 .
.
Учитывая, что q – вероятность появления ошибки в одном разряде слова, то:
![]() - вероятность непоявления ошибки в одном разряде слова;
- вероятность непоявления ошибки в одном разряде слова;
![]() - вероятность непоявления ошибки во всех n разрядах m слов массива.
- вероятность непоявления ошибки во всех n разрядах m слов массива.
Тогда ![]() .
.
И теперь окончательно получаем выражение для оценки вероятности обнаружения ошибки или неисправности:


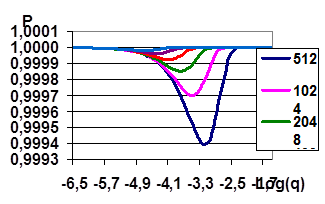
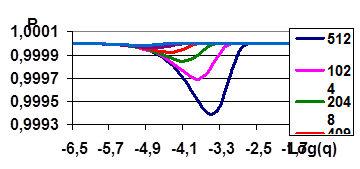
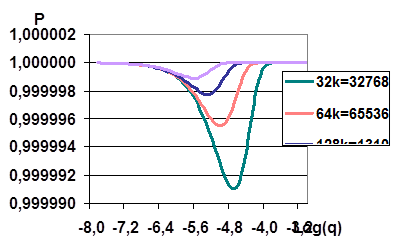
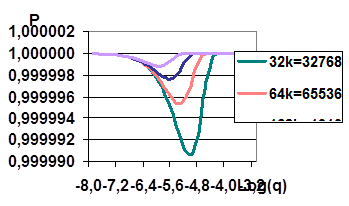
Это выражение может быть использовано для оценки эффективности контроля по модулю. В частности, может быть получена зависимость ![]() для носителей информации различной информационной емкости (0,5k; 1k; 2k; 4k; 8k; 16k и т.д.) и различной разрядности слов (8, 16, 32, 64 и т.д.) (рис. 1.18).
для носителей информации различной информационной емкости (0,5k; 1k; 2k; 4k; 8k; 16k и т.д.) и различной разрядности слов (8, 16, 32, 64 и т.д.) (рис. 1.18).
n=16

n=32
n=64
n=16
n=32
n=64
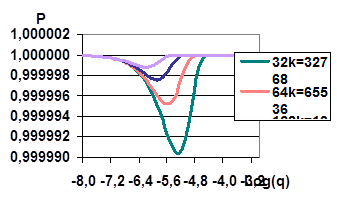
Рис. 1.18. Анализ разрядов оценки эффективности обнаружения ошибок.
Текст программы расчета и построения графиков приведен в разделе «Приложение».
Зависимости имеют выраженный минимум;
Условная вероятность обнаружения ошибки левее минимума повышается из-за увеличения надежности изделия (![]() и т.д.);
и т.д.);
Условная вероятность обнаружения ошибки правее минимума повышается из-за увеличения вероятности появления ошибок, в том числе обнаруживаемых аппаратурой контроля по модулю 3;
Эффективность обнаружения ошибок при контроле по модулю 3 с увеличением числа разрядов информационных слов при q=const увеличивается;
Эффективность обнаружения ошибок при контроле по модулю 3 с уменьшением интенсивности ошибок увеличивается.
Построим зависимость Рmin =f(log2 m) при n=16 (рис. 1.19).
| m |
log2 m |
Pmin |
| 0,5k=512 |
9 |
0,999424 |
| 1k=1024 |
10 |
0,999713 |
| 2k=2048 |
11 |
0,999857 |
| 4k=4096 |
12 |
0,999928 |
| 8k=8192 |
13 |
0,999964 |
| 16k=16384 |
14 |
0,999982 |
| 32k=32768 |
15 |
0,999991 |
| 64k=65536 |
16 |
0,999996 |
| 128k=131072 |
17 |
0,999998 |
| 256k=262144 |
18 |
0,999999 |
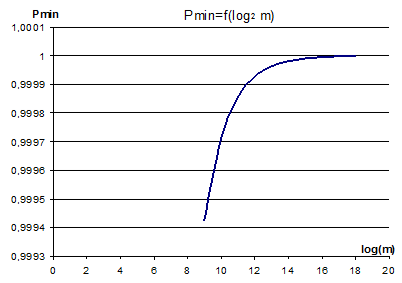
Рис. 1.19
Из графика видно, что с увеличением log2 m значение Рmin увеличивается, стремясь к единице. Т. е. эффективность обнаружения ошибок при контроле по модулю 3 с увеличением информационной емкости носителя информации (массива информации) увеличивается.
Высказанные выше соображения послужили основой для использования в совокупности контроля по mod 3 и контрольного суммирования для обеспечения обнаружения неисправности или ошибки с большой вероятностью. Была произведена оценка вероятности обнаружения ошибки при каждом рассмотренном выше виде контроля, а затем при их совместном исследовании. Вероятность появления ошибок j-й кратности в n-разрядном слове равна:
![]() ,
,
где ![]() - вероятность искажения одного разряда двоичного слова.
- вероятность искажения одного разряда двоичного слова.
Из этой формулы следует, что с увеличением кратности ошибок вероятность их возникновения уменьшается.
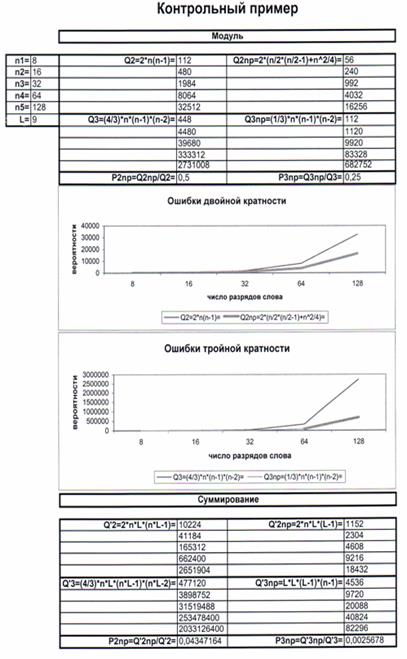
Были оценены вероятности обнаружения двойных и тройных ошибок. При этом рассмотрены представления массивов информационных и кодовых слов в виде матриц и выявлено общее число возможных двойных и тройных ошибок в слове, состоящем из n разрядов.
Общее число возможных двойных ошибок в n-разрядном слове равно:
![]() .
.
Это выражение получено из соображений, что каждая из двух ошибок может быть следующего вида ![]() ,
, ![]() ,
, ![]() и
и ![]() , т.е. четыре возможных случая.
, т.е. четыре возможных случая.
Число пропускаемых ошибок двойной кратности, в случае если число разрядов кратно периоду повторения весовой функции ![]() , при контроле по mod 3 равно:
, при контроле по mod 3 равно:
![]() ,
,
где ![]() - фиксируемое целое число, определяемое из выражения
- фиксируемое целое число, определяемое из выражения
![]() (
(![]() - модуль; если модуль равен 3, то
- модуль; если модуль равен 3, то ![]() и
и ![]() ) - период повторения весовой функции;
) - период повторения весовой функции;
![]() - коэффициент кратности;
- коэффициент кратности;
![]() - число разрядов слова.
- число разрядов слова.
Тогда вероятность пропуска двойной ошибки равна:
![]() .
.
Для ошибок тройной кратности получим:
![]() ;
;
![]() ;
;
![]() ,
,
где ![]() - число возможных ошибок тройной кратности;
- число возможных ошибок тройной кратности;
![]() - число пропускаемых тройных ошибок;
- число пропускаемых тройных ошибок;
![]() - вероятность пропускания тройной ошибки.
- вероятность пропускания тройной ошибки.
Была оценена вероятность обнаружения двойных и тройных ошибок при использовании метода контрольного суммирования. Массив информационных или кодовых слов был представлен в виде матрицы:
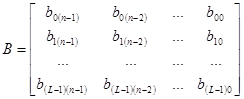
где ![]() - число разрядов слова;
- число разрядов слова;
![]() - число слов матрицы;
- число слов матрицы;
![]() - текущий номер слова;
- текущий номер слова;
![]() - текущий номер разряда слова;
- текущий номер разряда слова;
![]() - текущий разряд слова (текущий элемент матрицы).
- текущий разряд слова (текущий элемент матрицы).
Число возможных ошибок двойной кратности в этом случае равно:
![]() .
.
Двойные ошибки или двойные неисправности не будут обнаружены, если искажения информации находятся в одном столбце и имеют различные знаки. Тогда число пропускаемых двойных ошибок равно:
![]() .
.
Вероятность пропуска двойной ошибки равна:
![]() .
.
Из этого следует, что с увеличением числа слов проверяемого массива методом контрольного суммирования вероятность пропуска ошибки уменьшается.
Число возможных тройных ошибок было определено:
![]() .
.
Для пропускания тройной ошибки два искажения должны иметь один и тот же знак, противоположный знаку третьего искажения, и по величине составлять каждый половину третьего искажения. Такой случай возможен, если ошибки сосредоточены в соседних столбцах, причем третья ошибка расположена в столбце старших разрядов матрицы массива слов, а две ошибки, компенсирующие ее - в соседнем столбце (в сторону младшего разряда слова). Тогда число пропускаемых тройных ошибок будет равно:
![]() .
.
Вероятность пропуска тройных ошибок при использовании метода контрольного суммирования равна:
![]() .
.
Отсюда следует, что вероятность пропуска тройной ошибки зависит от числа строк матрицы или информационной емкости проверяемого массива слов.
Оценены число и вероятность обнаружения двойных и тройных ошибок при совместном использовании контроля по mod 3 и контрольном суммировании:
![]()
![]() ,
,
где ![]() - число обнаруживаемых двойных ошибок по mod 3;
- число обнаруживаемых двойных ошибок по mod 3;
![]() - число обнаруживаемых тройных ошибок по mod 3.
- число обнаруживаемых тройных ошибок по mod 3.
По методу контрольного суммирования все двойные ошибки, если они находятся в одном слове, обнаруживаются. Следовательно, ошибки, не обнаруженные контролем по mod 3, будут обнаружены методом контрольного суммирования. С другой стороны, если двойные ошибки находятся в разных словах (в разных строках матрицы ![]() ) и не могут быть обнаружены методом контрольного суммирования, то они будут обнаружены методом контроля по mod 3.
) и не могут быть обнаружены методом контрольного суммирования, то они будут обнаружены методом контроля по mod 3.
Отсюда был сделан вывод, что применение двух методов контроля приводит к повышению эффективности контроля, обеспечивающего обнаружение также ошибок двойной и тройной кратности.
Обеспечение надежности устройств автоматики и вычислительной техники
В первую очередь надежность устройств достигается за счет использования высоконадежных элементов . Внедрение полупроводниковых приборов вместо электровакуумных позволило повысить надежность устройств более чем на порядок, за счет того, что физические процессы в полупроводниковых приборах обеспечивают их функционирование при меньших питающих напряжениях, рассеиваемой мощности и, следовательно, температурах.
Дальнейшим развитием элементной базы явилось создание интегральных схем (ИС). ИС развиваются бурными темпами и последовательно были созданы ИС малой, средней и большой степени интеграции.
В настоящее время создаются сверхбольшие ИС, содержащие десятки тысяч и даже сотни тысяч элементов. Так как технология ИС непрерывно совершенствовалась, то указанное обстоятельство привело к тому, что, несмотря на резкое увеличение числа элементов на одном кристалле, надежность отдельного кристалла оставалась прежней.
Дальнейшее развитие элементов автоматики и вычислительной техники будет направлено по пути повышения степени интеграции в ИС, использования оптических элементов, а также внедрения новых типов печатных плат, контактных соединений и т. д.
Особое внимание при создании устройств уделяется подбору стандартизованных и унифицированных элементов, использование которых значительно повышает надежность, так как эти элементы отработаны наилучшим образом в схемном, конструктивном и технологическом отношении.
Вторым направлением повышения надежности является обеспечение оптимальных режимов работы элементов . В первую очередь это касается электрических режимов. Опыт эксплуатации элементов показывает, что оптимальные значения коэффициента нагрузки, при которых интенсивность внезапных отказов наименьшая, находятся в пределах 0,2—0,4. Одновременно установлено, что при этих же значениях коэффициента нагрузки параметры элементов медленнее отклоняются от номинальных. Большое значение имеет выбор коэффициента нагрузки по тепловому, механическому и радиационному режиму.
Указанные режимы в большой мере зависят от конструкции устройств, а также от принятых технических решений, и это должно учитываться в процессе проектирования.
Эффективным средством повышения надежности является резервирование . Опыт использования различных методов резервирования в устройствах автоматики и вычислительной техники показывает, что постоянное резервирование может использоваться по отношению к отдельным элементам или схемам. Для сложных конструкций, как правило, применяется резервирование замещением. Оно же используется и для отдельных устройств. Весьма часто в САУ используются мажоритарное резервирование и самокорректирующие коды.
Временное резервирование широко применяется в средствах вычислительной техники. Его конкретная реализация, например, осуществляется способом двойного - тройного счета. Некоторая задача решается дважды, и сравниваются полученные результаты. Если результаты совпадают, то это означает, что отказы и сбои отсутствуют и можно переходить к решению следующей задачи. Если же результаты не совпадают, то в устройстве произошел отказ или сбой во время одного из этапов вычислений.
Временное резервирование используется в устройствах вычислительной техники при тестовом контроле — периодическом решении специальных задач с известными ответами. На основании сравнения полученного результата с известным ответом можно судить о работоспособности устройства. Очевидно, что чем больше времени выделяется на тестовый контроль и чем чаще он проводится, тем с большей достоверностью можно судить о работоспособности контролируемого устройства.
Как показано выше, эффективным методом повышения надежности является восстановление отказавших устройств . Здесь в первую очередь возникают вопросы, связанные с обнаружением факта отказа и с поиском отказавших элементов. Как показывает опыт проектирования и эксплуатации САУ, эффективность диагностирования повышается при использовании автоматизированных систем контроля. В качестве центрального звена в этих системах не пользуются ЭВМ, что обеспечивает проверку большого числа контрольных точек в течение небольшого промежутка времени. Определенные особенности имеет и диагностирование устройств вычислительной техники. В этих устройствах широкое применение находят методы диагностирования, основанные на использовании различных логических соотношений, информационного и алгоритмического резерва. За последнее время в средствах вычислительной техники все шире используется сигнатурный анализ, который на сжатии информации и представлении информационных массивов в виде их специальных образов — сигнатур. Анализ сигнатур при обработке различных массивов информации позволяет сделать выводы о работоспособности устройств.
Время восстановления сокращается за счет обеспечения доступности всех узлов устройства для осмотра, т. е, определяется ремонтопригодностью разрабатываемых конструкции. В настоящее время широко используется модульно - блочный принцип построения устройств, при котором замена отказавших элементов осуществляется путем замены целых блоков. Снятые блоки уже вне изделия подлежат восстановлению па специальных стендах с использованием контрольно-измерительных приборов.
В устройствах вычислительной техники приняты четыре конструктивных уровня:
1) ИС и радиоэлементы;
2) типовые элементы замены (ТЭЗ), представляющие собой печатные платы с размещенным на них ИС;
3) рамы, в которых размещаются ТЭЗ;
4) шкафы, в которых крепятся рамы.
Как показывает опыт конструирования САУ, подобное деление существует и для других видов радиоэлектронной аппаратуры. Замена отказавших элементов осуществляется путем замены ТЭЗ. Отказавшие ТЭЗ затем поступают в ремонт. Большое значение для обеспечения надежности имеет качество изготовления аппаратуры, которое определяется технологической дисциплиной, организацией контроля на всех стадиях производства, проведением испытании и качеством комплектующих и материалов.
Существенное влияние на показатели надежности оказывают качество эксплуатации , принятая система технического обслуживания, обеспечение комплектами ЗИП и его пополнение, подготовленность обслуживающего персонала и ряд других факторов.
Анализ надежности аппаратуры показывает, что примерно 40 - 45% всех отказов возникает из-за ошибок на этапе проектирования, 20% - от ошибок, допущенных при производстве, 30% - от неправильной эксплуатации и 5- 10% - от естественного износа и старения.
Одним из специальных методов повышения надежности САУ является использование самонастраивающихся и самоорганизующихся систем . Особенно важным является принцип самоорганизации. Для реализации его создаются такие САУ, которые способны изменять свою структуру в процессе функционирования. Перестройка структуры осуществляется таким образом, чтобы обеспечить с помощью сохранивших работоспособность звеньев системы требуемое качество регулируемого процесса. Это приводит к необходимости учета при проектировании систем влияния параметров отдельных звеньев на соответствующие показатели исследуемой системы.
Таким образом, можно видеть, что существует достаточно много направлений в повышении надежности САУ и их составляющие показатели исследуемой системы. Из всех перечисленных выше особо можно отметить проблему диагностирования, решение которой в устройствах САУ имеет определенную специфику.
Социально-экономическое обоснование использования аппаратурного контроля
Для уменьшения потерь от сбоев и отказов, порождающих ошибки, необходимо предотвратить распространение ошибки в вычислительном процессе, так как в противном случае существенно усложняются и удлиняются процедуры проверки правильности работы программы, определения и устранения искажений в программе, данных и промежуточных результатах.
Для этого необходимо обнаруживать появление ошибки в выполняемых машиной преобразованиях информации как можно ближе к моменту ее возникновения. С этой целью надо иметь систему автоматического контроля правильности работы ЭВМ, которая при появлении ошибки в работе машины немедленно приостанавливает вычисления и производит диагностирование характера ошибки, с тем, чтобы при сбое автоматически восстанавливались достоверность информации и выполнение программы, и при этом был минимален повторяемый участок программы, а при отказе обслуживающий персонал был извещен о необходимости ремонта машины.
Наличие такой системы освобождает пользователя от забот о контроле правильности выполняемых машиной операций, что существенно при работе ЭВМ в системах реального времени, управляющих технологическими процессами. В противном случае пользователь вынужден будет включить в свои программы процедуры двойного счета, просчет контрольных вариантов, что усложняет программирование задач пользователя и приводит к непроизводительным затратам машинного времени.
В современных ЭВМ общего назначения средства автоматического контроля обеспечивают контроль правильности функционирования до 90-95% оборудования машины.
Приложение
Программа оценки эффективности контроля по модулю передач и хранения информации в ВМ, ВС и ВК.
input “Modul, m, n, q, koltoch=”; Modul, m, n, q, koltoch
a=q
for j = 1 to koltoch
if j>20 then input “ENTER”; A$
p = 0
Sum = 0
f=n
for i = 1 to n
Sum = Sum + (f * а ^ i * (1 - а) ^ (n - i) * ((Modul-1)/Modul) * (1 - ((-1) ^ i) / /((Modul-1) ^ i)))
i=i+1
f=(n-i+1)/((i-1)*i)
i=i-1
next i
pn = (l -((1 -Sum)^ m))/(l -((1 -a)^ m^ n))
p = p + pn
qn = q* 1.2
a = qn - q
q = qn
Er=-log(q)/log(10)
print “Er=”; Er; tab(20); “p=”; p
next j
end
Modul – значение модуля; Modul=3.
q-вероятность ошибки; q=a=0.00000001.
koltoch - количество точек; koltoch=100
n- число разрядов слова; n=16; 32; 64.
m- число слов в массиве информации; m=0,5k; 1k; 2k; 4k; 8k; 16k; 32k; 64k; 128k; 256k (k=1024).
Выводы
В данной работе нами рассматривались:
1. Аппаратурный контроль: его общая характеристика, а также числовой контроль по модулю;
2. Математические основы контроля носителя информации;
3. Вопрос обеспечения надежности устройств автоматики и вычислительной техники.
В приведенном контрольном примере рассматривались зависимости вероятностей появления ошибок двойной и тройной кратности от разрядности информационного слова. Как уже говорилось выше, применение одного вида контроля (суммирования или контроля по модулю) не является достаточно эффективным, т.к. каждый из методов имеет недостатки. Для достижения наибольшей вероятности обнаружения ошибок следует использовать комбинацию данных методов. В сочетании они дополняют друг друга: ошибки, не обнаруженные контролем по mod 3, будут обнаружены методом контрольного суммирования. С другой стороны, если двойные ошибки находятся в разных словах и не могут быть обнаружены методом контрольного суммирования, то они будут обнаружены методом контроля по mod 3.
Список используемой литературы
1. Клямко Э.И. Схемный и тестовый контроль автоматических цифровых вычислительных машин. - М.: Сов. Радио, 1963
2. Зайко Ю.Г. Эффективность контроля по модулю. - Вопросы радиоэлектроники, сер 7, вып. 1, 1965
3. Сидоров A.M. Методы контроля электронных цифровых машин. - М.:
Сов. Радио, 1966
4. Мосесян Н.Г., Чопурян А.Л. Эффективность проверки информационных ПЗУ схемами аппаратного контроля. - Вопросы
судостроения, сер. ВТ, вып. 3, 1974
5. Каган Б.М., Мкртумян И.Б. Основы эксплуатации ЭВМ: Учеб. пособие для вузов / Под ред. Б.М. Кагана. - 2-е изд., перераб. и дополн. - М.:
Энергоатомиздат, 1988
6. Ярмолик В.Н. Контроль и диагностика цифровых узлов ЭВМ. - МН.:
Наука и техника, 1988
7. Пашковский Г.С. Задачи оптимального обнаружения и поиска отказов
в РЭА / Под ред. И.А. Ушакова. - М.: Радио и связь, 1981
(Межиздательская серия: Надежность и качество)
8. Техническая кибернетика.
9. Путинцев Н.Д. Аппаратный контроль управляющих цифровых вычислительных машин. - М.: Сов. Радио, 1966
10.Черкесов Г.Н. Надежность аппаратно-программных комплексов, Учебное пособие. - СПБ.: Питер, 2006
11. ГОСТ 23146-78. Система технического обслуживания и ремонта техники. Выбор и задание показателей ремонтопригодности. Общие требования. - М.: Издательство стандартов, 1978.
12. Глазунов Л.П., Грабовецкий В.П., Щербаков О.В. Основы теории надежности автоматических систем управления. - М.: Энергоатомиздат, 1984
13. ГОСТ 28195-89. Оценка качества программных средств. Общие положения. — М.: Издательство стандартов, 1989
14. Черкесов Г.Н. Проектирование систем контроля с учетом надежности.- М.: Знание, 1989
15. Севастьянов Б.А. Задачи о влиянии бункеров на среднее время простоя автоматической линии станков // Теория вероятностей и ее применения. - 1962. - т. 7, вып. 4, с. 11-24
16. Журавлев Ю.П., Котелюк Л.А., Циклинский Н.И. Надежность и контроль ЭВМ. - М.: Сов. Радио, 1978
17. Хетагуров Я.А., Руднев Ю.П. Повышение надежности цифровых устройств методами избыточного кодирования. - М.: Энергия, 1974
18. Самофалов К.Г., Корнейчук В.Н., Городний А.В. Структурнологические методы повышения надежности запоминающих устройств. - М.: Машиностроение, 1976.
19. Зайко Ю.Г. К вычислению эффективности контроля по модулю. - Кибернетика, 1967, №6
20. Ушакова Г.Н. Аппаратный контроль и надежность специализированных ЭВМ. - М.: Сов Радио, 1969
21. Селлерс Н.Н. Методы обнаружения ошибок в работе ЭЦБМ. - М: Мир, 1972
22. Автоматика и вычислительная техника 1973, №4, с. 49-52,1968, №3, с. 54-60
23. Обнаружение и исправление ошибок в дискретных устройствах / Под ред. В.С. Толстякова. - М.: Сов. Радио, 1972
24. Жилкин Д.С., Хетагуров Л.Л. Вычислительная техника. Вып. 4 - М.:
Атомиздат, 1962, с. 79-97 некоторые вопросы аппаратно-логического контроля узлов ЭВМ
25. Вопросы радиоэлектроники, т. 7, 1962, вып. 2, с. 15-19
26. Программное обеспечение микро ЭВМ: Практ. пособие для инж. - пед. работников системы проф. - техн. образования. В 11-ти кн. / Под ред. В.Ф. Шаньгина. кн. 10 Шевкопляс Б.В. Контроль, наладка и тестирование. - М.: Высш. шк., 1988
27. Черкесов Г.Н. Учет характеристик системы контроля и диагностики
стр. 146
28. система с периодическим контролем работоспособности:
29. периодический аппаратный контроль, с. 274;
30. периодический программный контроль, с. 272
31. Фомченкова Е.В. Разработка программного обеспечения и аппаратных средств для обнаружения неисправностей магнитно-электронных сменных блоков постоянной памяти и их узлов АСОИУ. - М.: МГТУ им. А.Н. Косыгина, 2006
32. Демидов А.В. Контроль информации при ее хранении и передаче в вычислительной технике. - М.: МГТУ им. А.Н. Косыгина, 2007