| Скачать .docx |
Курсовая работа: Определение основных характеристик системы передачи сообщений с дискретной фазовой модуляцией
Определение основных характеристик системы передачи сообщений с дискретной фазовой модуляцией
1. Задание на курсовой проект
Рассчитать основные характеристики системы передачи сообщений, включающий в себя источник сообщений, дискретизатор, кодирующее устройство (кодер), модулятор, канал связи, демодулятор, декодер и фильтр-восстановитель.
1. Исходные данные:
Таблица 1.1 Исходные данные
| Параметр | Обозначение | Значение |
| Нижняя граница интервала значений сигнала a(t) | amin , В | 0,15 |
| Верхняя граница интервала значений сигнала a(t) | amax , В | 8,45 |
| Частота ограничения спектра сигнала a(t) | FB , КГц | 625 |
| Шаг квантования дискретизатора | Da, В | 0,15 |
| Номер квантования | J | 46 |
| Спектральная плотность средней мощности шума | N0, В2 /Гц | |
| Вид модуляции | ДФМ | |
| Тип модулятора | Определить | |
| Тип демодулятора | Некогерентный |
2. Структурная схема системы связи и назначение ее элементов
Данная курсовая работа посвящена расчету основных характеристик Системы Передачи Сообщений – совокупности технических средств, обеспечивающих формирование канала передачи, и является важным практическим шагом на пути освоения курса Теории Электрической Связи, а значит и на пути формирования технического образования студентов.
Каналом передачи называют совокупность технических средств и среды распространения, обеспечивающих передачу электрических сигналов с ограниченной мощностью и в ограниченной полосе частот (т.е. с ограниченной скоростью), электрическим сигналом в общем смысле называется изменяющееся во времени и пространстве параметры электромагнитного поля. Под модуляцией понимается процесс изменения тех или иных параметров одного сигнала под воздействием каких-либо параметров другого. В случае если в качестве передаваемого сигнала используется синусоидально изменяющееся напряжение или ток, его параметрами можно считать амплитуду и полную фазу, содержащую в себе частоту и начальную фазу.
|
|
|
|
|
|
|
|
|
|
|
|
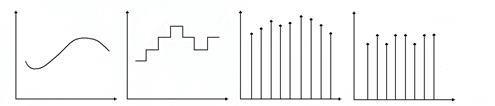
Рис. 2.1 Временные диаграммы сигналов:
а – сигнал непрерывный по времени и по состояниям,
б – дискретный по состояниям и по времени сигнал,
в - непрерывный по состояниям и дискретный по времени сигнал,
г – сигнал дискретный и по состояниям, и по времени
Аналитически сигналы есть функции от времени и бывают дискретными и непрерывными или аналоговыми. Если сигнал как функция u(t) принимает только определенные дискретные значения и (например, 0 и 1), то он называется, дискретным по состояниям . Если же сигнал может принимать любые значения в некотором интервале, то он называется аналоговым или непрерывным по состояниям . Под дискретным по времени сигналом необходимо понимать сигнал, заданный не на всей области значений времени, а только в определенные моменты tu . Рисунок 2.1 поясняет эти отличия. Здесь а – сигнал непрерывный по времени и по состояниям, б – дискретный по состояниям и по времени сигнал, в-непрерывный по состояниям и дискретный по времени сигнал, г – сигнал дискретный и по состояниям, и по времени.
Поскольку заранее известный (детерминированный) сигнал не может нести никакой информации, то все сигналы, рассматриваемые нами в курсе ТЭС и работе, являются случайными процессами.
Длительность сигнала Тс – интервал времени в пределах которого он существует, его динамическим диапазоном Dc – отношение наибольшей мгновенной мощности сигнала к той наименьшей мощности, которую необходимо отличать от нуля при заданном качестве передачи. За ширину спектра сигнала Fc примем диапазон частот, в пределах которого сосредоточена основная его энергия. В технике связи спектр сигнала часто сознательно сокращают, т. к. аппаратура и линии связи имеют ограниченную полосу пропускаемых частот. Сокращение спектра осуществляется исходя из допустимых норм искажений сигнала.
Сообщение – совокупность знаков (символов), содержащих ту или иную информацию, подлежащую передачи на расстояние
Рассмотрим структурную схему Системы Электросвязи и ее основные элементы (рисунок 2.2).
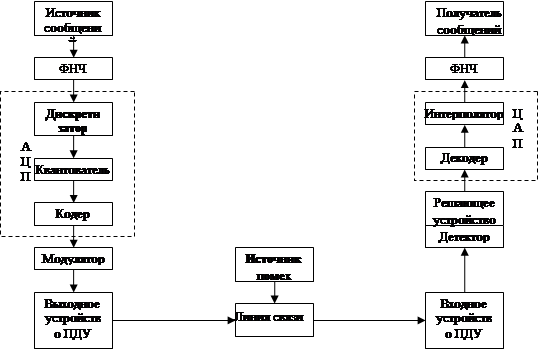
Рис. 2.2 Структурная схема системы электросвязи
На рис. 2.2 приведена структурная схема системы передачи непрерывного сообщения методом импульсно-кодовой модуляции (ИКМ). Она позволяет решить проблему передачи непрерывного сообщения по дискретному каналу связи (ДКС). Данная схема состоит из источника сообщений (ИС), аналого-цифрового преобразователя (АЦП), фазового модулятора, двоичного дискретного канала связи (ДКС), фазового детектора (прием некогерентный), цифро-аналогового преобразователя (ЦАП) и получателя сообщений (ПС).
ИСТОЧНИК СООБЩЕНИЙ (ИС) – объект, которому необходимо передать некое сообщение в виде сигнала a(t).
ДИСКРЕТИЗАТОР (Д) – устройство, обеспечивающее дискретизацию сигнала a(t) по теореме Котельникова во времени.
КОДЕР (Код) – преобразователь дискретизированного во времени сигнала в кодированный.
МОДУЛЯТОР (Мод) – преобразователь сигналов кодовых импульсов в сигналы, пригодные для передачи по каналу связи.
КАНАЛ СВЯЗИ обеспечивает физический перенос сигнала на расстоянии по линии связи, внося в него при этом шумы и искажения.
ДЕМОДУЛЯТОР (Дем) – устройство, обеспечиающее обратное преобразование сигнала в удобном для передачи виде в дискретный по времени и состояниям сигнал.
ДЕКОДЕР (Дек) – преобразователь кодированного сигнала в дискретный по состояниям сигнал.
ФИЛЬТР-ВОССТАНОВИТЕЛЬ (ФВ) – Фильтр Нижних Частот (далее ФНЧ), восстанавливающий переданный ИС сигнал из дискретизированного по Котельникову сигнала.
Линией связи называется среда, используемая для передачи сигналов от передатчика к приемнику. При передаче сигнал может искажаться и на него могут накладываться шумы n(t).
Для непрерывных каналов связи характерно: во-первых, линейность – тогда выходной сигнал является суперпозицией передаваемого сигнала и помехи, во-вторых, наличие помех на выходе канала, даже если на его вход не поступает сигнал, в-третьих, сигнал при передаче по каналу связи претерпевает задержку по времени и затухание по уровню. В реальных каналах всегда имеют место искажения сигнала, обусловленные несовершенством характеристик канала и, нередко, изменением параметров канала во времени.
Практически в любом диапазоне частот имеют место внутренние шумы аппаратуры.
Шум бывает аддитивным (зашумленный сигнал есть арифметическая сумма полезного сигнала и шума, существующего во времени постоянно) и мультипликативным (то же, только наличие шума в канале в каждый момент времени определяется случайным процессом). Среди аддитивных шумов особое место занимает флуктуационная помеха, имеющая нормальное (гауссовское) распределение.
Источник сообщений – это некий объект или система (подразумевается либо человек, либо ЭВМ, либо автоматическое устройство или что-либо другое), информацию о состоянии или поведении которого следует передать на определенное расстояние. Информация передаваемая от ИС является непредвиденной для получателя. Поэтому количественную меру передаваемой по системе связи (СС) информации в теории электрической связи выражают через вероятностные характеристики сигналов (сообщений). Сообщение – это форма представления информации. Например информация может быть представлена в изменении тока или напряжения на выходе какого-либо устройства под действием порождающих факторов.
В ФНЧ (фильтре нижних частот) сообщение (сигнал) вначале фильтруется с целью ограничения его спектра некоторой верхней частотой ![]() . Полученный таким образом сигнал в дальнейшем необходим для представления его в виде последовательности отсчетов
. Полученный таким образом сигнал в дальнейшем необходим для представления его в виде последовательности отсчетов ![]() , k=0,1,2…, наблюдаемых на выходе дискретизатора. Далее отсчеты сообщения квантуются по уровню в АЦП. Уровень квантования зависит от разрядности АЦП. Чем больше разрядность АЦП, тем с большей достоверностью преобразуется исходный аналоговый сигнал, действующий на вход АЦП. Например, на практике используют не более 16-ти разрядные АЦП, т. к. с увеличением разрядности увеличивается и время преобразования в кодовую комбинацию на выходе АЦП. Квантовые уровни затем кодируются двоичным безызбыточным кодом.
, k=0,1,2…, наблюдаемых на выходе дискретизатора. Далее отсчеты сообщения квантуются по уровню в АЦП. Уровень квантования зависит от разрядности АЦП. Чем больше разрядность АЦП, тем с большей достоверностью преобразуется исходный аналоговый сигнал, действующий на вход АЦП. Например, на практике используют не более 16-ти разрядные АЦП, т. к. с увеличением разрядности увеличивается и время преобразования в кодовую комбинацию на выходе АЦП. Квантовые уровни затем кодируются двоичным безызбыточным кодом.
Образовавшаяся последовательность кодовых комбинаций образует сигнал ИКМ, который подводится к фазовому модулятору-устройству, предназначенному для согласования ИС с используемой линией связи. В модуляторе формируется сигнал ![]() , способный распространятся по линии связи в виде электрического или электромагнитного колебания.
, способный распространятся по линии связи в виде электрического или электромагнитного колебания.
Для необходимого отношения мощностей сигнала и помехи (шума) на входе приемника сигнал, прошедший по каналу связи с источником помех, фильтруется и усиливается в выходных каскадах ПДУ (передающего устройства).
Помехой называется любое случайное воздействие на сигнал, которое ухудшает верность воспроизведения передаваемых сообщений. В проводных каналах связи основным видом помех являются импульсные шумы и прерывания связи. Появление импульсных помех часто связано с автоматической коммутацией и перекрестными наводками. Прерывание связи есть явление в канале, когда передаваемый сигнал резко затухает или исчезает
Сигнал с выхода ПДУ поступает в линию связи, где на него накладывается помеха ![]() и на вход ПРУ (приемного устройства) воздействует смесь переданного сигнала и помехи
и на вход ПРУ (приемного устройства) воздействует смесь переданного сигнала и помехи ![]() . В нем принятый сигнал фильтруется и подается на детектор.
. В нем принятый сигнал фильтруется и подается на детектор.
В результате демодуляции (некогерентный прием), из принятого сигнала ![]() выделяется закон изменения информационного параметра, который в нашем случае пропорционален сигналу ИКМ. Для регистрации переданных двоичных символов к выходу фазового демодулятора подключено решающее устройство (РУ). В условиях действия помех в НКС РУ принимает решения неоднозначно, что в свою очередь может привести к двум возможным ошибкам (при передаче двоичных сигналов
выделяется закон изменения информационного параметра, который в нашем случае пропорционален сигналу ИКМ. Для регистрации переданных двоичных символов к выходу фазового демодулятора подключено решающее устройство (РУ). В условиях действия помех в НКС РУ принимает решения неоднозначно, что в свою очередь может привести к двум возможным ошибкам (при передаче двоичных сигналов ![]() или 1):
или 1):
1. При определенном значении ![]() - порога срабатывания РУ не смотря на то, что сигнал отсутствует, шум может превысить установленное значение порога и примется ошибочное решение о наличие сигнала. Так происходит при наличии помехи положительной полярности, т.е. помехи, которая складывается с сигналом. Это, так называемая, ошибка первого рода.
- порога срабатывания РУ не смотря на то, что сигнал отсутствует, шум может превысить установленное значение порога и примется ошибочное решение о наличие сигнала. Так происходит при наличии помехи положительной полярности, т.е. помехи, которая складывается с сигналом. Это, так называемая, ошибка первого рода.
2. При определенном значении ![]() - порога срабатывания РУ несмотря на то, что сигнал и присутствует, но установленное значение порога
- порога срабатывания РУ несмотря на то, что сигнал и присутствует, но установленное значение порога ![]() решающего устройства не будет превышено и примется решение об отсутствии сигнала. Так происходит при наличии помехи отрицательной полярности, т.е. помехи которая вычитается из сигнала. Это ошибка второго рода.
решающего устройства не будет превышено и примется решение об отсутствии сигнала. Так происходит при наличии помехи отрицательной полярности, т.е. помехи которая вычитается из сигнала. Это ошибка второго рода.
Все эти ошибки вызывают несоответствия переданных и принятых кодовых комбинаций.
Наконец, для восстановления переданного непрерывного сообщения ![]() принятые кодовые комбинации подвергаются декодированию, интерполяции и низкочастотной фильтрации. При этом в декодере по двоичным кодовым комбинациям восстанавливаются
принятые кодовые комбинации подвергаются декодированию, интерполяции и низкочастотной фильтрации. При этом в декодере по двоичным кодовым комбинациям восстанавливаются ![]() ичные уровни
ичные уровни ![]() ,
, ![]() ,
, ![]()
3. Источник сообщений
Источник выдает сообщение a(t), представляющее собой непрерывный стационарный процесс, мгновенные значения которого в интервале от ![]() до
до ![]() равновероятны, а основная доля мощности сосредоточена в полосе частот от 0 до
равновероятны, а основная доля мощности сосредоточена в полосе частот от 0 до ![]() .
.
Требуется:
1) Записать аналитическое выражение и построить график одномерного закона распределения плотности вероятности ![]() мгновенных значений случайного процесса а(t).
мгновенных значений случайного процесса а(t).
2) Найти математическое ожидание ![]() и дисперсию D процесса а(t).
и дисперсию D процесса а(t).
1. Для нахождения одномерной плотности вероятности мгновенных значений случайного процесса а(t) учтем, что все его мгновенные значения в заданном интервале равновероятны, и, следовательно. Плотность вероятности будет постоянна в этом интервале и равна нулю вне этого интервала.
Значение плотности вероятности внутри интервала от ![]() до
до ![]() определим из условия нормировки:
определим из условия нормировки:
![]() ;
;  ;
; ![]() ;
;
![]() .
.
Таким образом, аналитическое выражение для плотности распределения вероятности случайного процесса а(t) имеет вид:
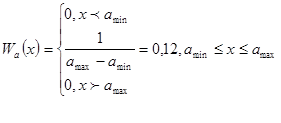
Тогда построим график одномерного закона распределения плотности вероятности мгновенных значений случайного процесса а(t):
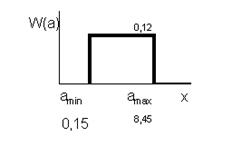 |
Рис. 3.1. график одномерного закона распределения плотности вероятности мгновенных значений случайного процесса а(t)
2. Найдем математическое ожидание М случайного процесса а(t):
![]()
Так как W(а) вне интервала от ![]() до
до ![]() равно 0, то получим:
равно 0, то получим:


![]()
То есть получили, что среднее значение случайного процесса a(t) равно 4.3 В.
Найдем дисперсию или математическое ожидание квадрата D случайного процесса a(t):
![]()
 ;
; ![]() ;
;
![]()
4. Дискретизатор
Дискретизация – первый шаг при преобразовании аналогового сигнала в цифровую форму. Передача аналоговых сигналов цифровыми методами сопровождается шумом квантования, возникающим из-за деления динамического диапазона кодека на конечное число дискретных величин (ступеней квантования).
Передача информации от источника осуществляется по дискретной системе связи. Для этого сообщение a(t) в дискретизаторе квантуется по времени и по уровню равномерным шагом. Шаг квантования по уровню ![]() .
.
Требуется:
1) Определить шаг квантования по времени ![]() .
.
2) Определить число уровней квантования L.
3) Рассчитать относительную мощность шума квантования, определив ее как отношение средней мощности шума квантования Ршк к средней мощности сигнала, т.е. дисперсии σ2 .
4) Рассматривая дискретизатор, как дискретный источник информации с объемом алфавита L, определить его энтропию Н и производительность Н´ (отсчеты, взятые через интервал ![]() , считать независимыми).
, считать независимыми).
1. Шаг квантования по времени ![]() определим из теоремы Котельникова:
определим из теоремы Котельникова:
![]()
2. Число уровней квантования L при равномерном шаге ![]() =0,1 определятся как частное от деления размаха сигнала (amax
-amin
) на шаг квантования
=0,1 определятся как частное от деления размаха сигнала (amax
-amin
) на шаг квантования ![]() .
.
![]()
3. Для нахождения средней мощности шума квантования надо знать закон распределения шума – ![]() . Так как мгновенные значения равновероятны в заданном интервале, то закон распределения шума
. Так как мгновенные значения равновероятны в заданном интервале, то закон распределения шума ![]() в интервале
в интервале ![]() будет равномерным и не будет зависеть от номера интервала.
будет равномерным и не будет зависеть от номера интервала.
Следовательно, средняя мощность шума квантования будет равна:
Закон определения шума определим из условия нормировки:
![]() ;
;  ;
; ![]()

Тогда средняя мощность шума квантования:
![]()
Относительную величину мощности шума квантования получим, взяв отношение Ршк к дисперсии случайного процесса a(t):
![]()
4. Энтропия – это математическое ожидание количества информации или мера неопределенности сообщений.
При заданном законе распределения мгновенных значений процесса a(t) все уровни квантования равновероятны. Для этого найдем вероятность j-го уровня квантования, что равносильно вероятности попадания a(t) в интервал ![]() .
.

Видно, что ![]() не зависит от j.
не зависит от j.
Тогда энтропия будет определяться как энтропия дискретного источника независимых сообщений, все символы которого вероятны:

Производительностью такого источника будет суммарная энтропия сообщений, переданных за единицу времени:
![]()
5. Кодер
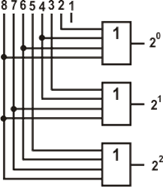
Шифратор (кодер) – это устройство, представляющее собой преобразователь позиционного кода в двоичный. В позиционном коде число определяется позицией единиц в серии нулей, или позицией нуля в серии единиц. Например, если в серии десять нулей, имеется вот такой код 0001000000, то это эквивалентно числу 7 (счет ведется справа налево от нуля). Такой код служит для включения объектов или передачи данных на них. Для преобразования позиционного кода в двоичный составим таблицу 5.1:
|
Таблица 5.1
| Позиционный код | Двоичный код | |||||||||
| 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 22 | 21 | 20 |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 |
| 0 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 |
| 0 | 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 |
| 0 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 1 |
| 0 | 0 | 0 | 1 | 0 | 0 | 0 | 0 | 1 | 0 | 0 |
| 0 | 0 | 1 | 0 | 0 | 0 | 0 | 0 | 1 | 0 | 1 |
| 0 | 1 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 0 |
| 1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 |
Для наглядности, единицы, как видно, располагаются по диагонали. Единице соответствуют единицы в позиционном коде, соответствующие числам 2, 4, 6, 8 (разрядам). Следовательно, эти разряды объединяются через схему ИЛИ. Аналогичные операции проходят над старшими разрядами. В результате получим рис. 5.1:
Примечание: разряд 1 так и висит в воздухе, как на схеме. Согласно таблице, ей соответствует код 000.
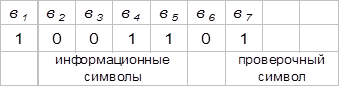
В кодере процесс кодирования осуществляется в два этапа. На 1-ом этапе производится безызбыточное (примитивное) кодирование каждого уровня квантованного сообщения a(t1 ) к -разрядным двоичным кодом. На 2-ом этапе к полученной к -разрядной двоичной кодовой комбинации добавляется один проверочный символ, формируемый простым суммированием по модулю 2 всех информационных символов. В результате этих преобразований на выходе кодера образуется синхронная двоичная случайная последовательность b(t) (синхронный случайный телеграфный сигнал), состоящая из последовательности биполярных импульсов единичной высоты, причем положительные импульсы в ней соответствуют нулевым символам кодовой комбинации, а отрицательные – единичным.
Требуется:
1) Определить минимальное значение к, необходимое для кодирования всех L уровней квантованного сообщения a(t1 ).
2) Определить избыточность кода с одной проверкой на четность Рк .
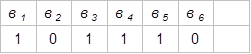
3) Записать двоичную кодовую комбинацию, соответствующую передаче aj -го уровня, считая, что при примитивном кодировании на 1-м этапе aj -му уровню ставится в соответствие двоичная кодовая комбинация, представляющая собой запись числа в двоичной системе.
4) Определить число двоичных символов, выдаваемых кодером в секунду Vк и длительность двоичного символа Т.
1. Найдем минимальное значение к, необходимое для кодирования всех L уровней квантованного сообщения a(t1 ).
![]()
2. Определим избыточность кода с одной проверкой на четность.
![]()
3. Представим число j =46 в двоичной системе счисления:
![]()
Следовательно к-6 информационных символов кодовой комбинации будут иметь вид:
 |
Определим проверочный символ в7
путем суммирования по модулю 2 всех к=6 информационных символов ![]()
Учитывая, что правило суммирования по модулю 2 имеет вид:
![]()
 получим, что в7
=
1.
получим, что в7
=
1.
Таким образом, искомая кодовая комбинация, соответствующая передаче а 55 уровня квантованного сообщения, будет иметь вид:
4. Число двоичных символов, выдаваемых кодером в секунду ![]() , определяется числом отсчетов (1/Δt) и числом двоичных символов n=k+1, приходящихся на один отсчет.
, определяется числом отсчетов (1/Δt) и числом двоичных символов n=k+1, приходящихся на один отсчет.
![]()
Длительность двоичного символа определяется как величина, обратная ![]()
![]()
6. Модулятор
В модуляторе синхронная двоичная случайная последовательность биполярных импульсов в(t) осуществляет манипуляцию гармонического переносчика U0 cos(2πf0 t).
Параметры несущей:
U0 =1B,
f0
=100Vk
=100*9,09*10![]() =909 МГц;
=909 МГц;
![]() ;
;
![]() .
.
Требуется:
1. Изобразить временные диаграммы модулирующего ![]() и манипулированного
и манипулированного ![]() сигналов, соответствующих передаче
сигналов, соответствующих передаче ![]() -го уровня сообщения
-го уровня сообщения ![]() .
.
2. Привести выражение и начертить график корреляционной функции модулирующего сигнала ![]() .
.
3. Привести выражение и начертить график спектральной плотности мощности модулирующего сигнала ![]() .
.
4. Определить условную ширину энергетического спектра модулирующего сигнала ![]() из условия
из условия ![]() (где
(где ![]() выбирается от 1 до 3). Отложить полученной значение
выбирается от 1 до 3). Отложить полученной значение ![]() на графике
на графике ![]() .
.
5. Записать аналитическое выражение модулированного сигнала ![]() .
.
6. Привести выражение и построить график энергетического спектра модулированного сигнала ![]() .
.
7. Определить условную ширину спектра модулированного сигнала ![]() . Отложить полученное значение
. Отложить полученное значение ![]() на графике
на графике ![]() .
.
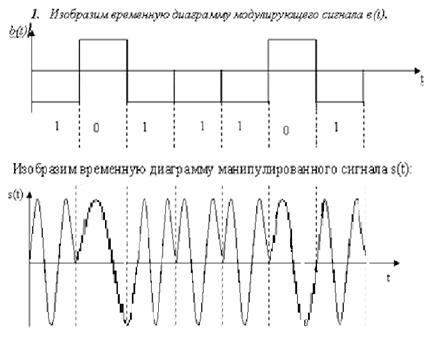
Рис. 6.1. Временные диаграммы модулирующего и монипулированного сигналов
2 . Для определения функции корреляции рассмотрим два сечения в моменты t1 и t2 , (t2 – t1 =τ) и найдем математическое ожидание произведения X(t1 ) X(t1 + τ).
Если τ>Т, то эти сечения принадлежат разным тактовым интервалам и произведение может с равной вероятностью принимать значения +1 и -1, так что его математическое ожидание равно 0.
Если τ <Т, то возможны два варианта: случай А, когда они принадлежат одному интервалу и, следовательно, X(t1
) X(t1
+ τ)=1, и случай В, когда они принадлежат разным таковым интервалам и X(t1
) X(t1
+ τ) может с равной вероятностью равняться +1 и -1. Поэтому при τ <Т математическое ожидание X(t1
) X(t1
+ τ) равно вероятности р(а) того, что оба сечения оказались в одном интервале. Случай А имеет место, если первое из двух сечений отстоит от начала тактового интервала не более чем Т-![]() , а вероятность этого равна (Т-
, а вероятность этого равна (Т-![]() )/Т.
)/Т.
Тогда функция корреляции имеет вид: 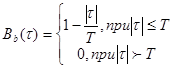
В(![]() )
)

Рис. 6.2. Функция корреляции
3. Найдем выражение для спектральной плотности мощности модулированного сигнала по теореме Винера-Хинчина:
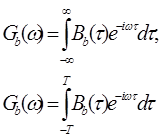
Так как Bb (τ) – функция четная, то
Возьмем интеграл  по частям:
по частям:
Построим график спектральной плотности мощности модулирующего сигнала:
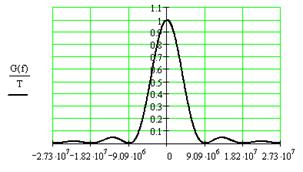
Рис. 6.3. График спектральной плотности мощности модулирующего сигнала
4. Найдем условную ширину спектра сигнала. Под условной шириной спектра сигнала понимают полосу частот, в которой сосредоточена основная доля мощности сигнала. Чем больше выбранное значение α, тем большая доля мощности будет сосредоточена в этой полосе частот.
Пусть α=2
![]()
Определим долю мощности, сосредоточенную в полосе частот от 0 до ![]() .
.
![]() ;
; 
Рассмотрим по отдельности числитель и знаменатель этого выражения.

Возьмем этот интеграл по частям:
![]()

 -интегральный синус;
-интегральный синус;
Аналогично получим, что ![]()

То есть получили, что 95% всей мощности сигнала приходится на полосу частот от 0 до ![]() .
.
5. После перекодировки последовательности и в(t) в последовательность C(t) по правилу ![]() нулевому символу соответствует
нулевому символу соответствует ![]() , единичному –
, единичному – ![]() . В дальнейшем происходит модулирование сигнала s(t) по правилу:
. В дальнейшем происходит модулирование сигнала s(t) по правилу:
![]()
Пусть ![]() , тогда
, тогда
При ![]() , тогда
, тогда ![]() , следовательно
, следовательно ![]()
При ![]() , тогда
, тогда ![]() , следовательно
, следовательно ![]()
6. При ДФМ выражение энергетического спектра модулированного сигнала имеет вид:
а) ![]()
![]()
Тогда построим график энергетического спектра модулированного сигнала Gs (f).
 |
Рис. 6.5. График энергетического спектра модулированного сигнала Gs (f)
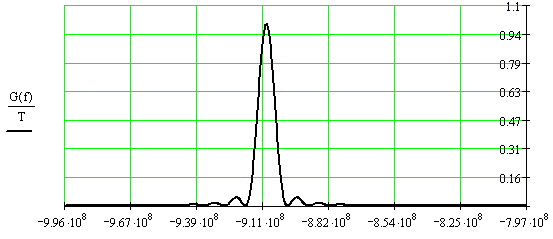 |
Рис. 6.6. График энергетического спектра модулированного сигнала Gs (f) (1)
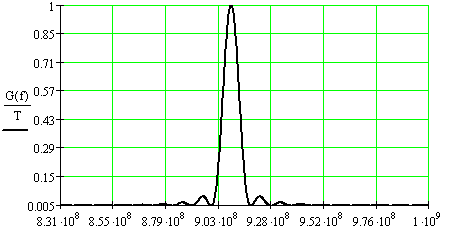
Рис. 6.7. График энергетического спектра модулированного сигнала Gs (f) (2)
7. Условная ширина энергетического спектра будет в 2 раза больше условной ширины энергетического спектра модулирующего сигнала:
![]()
7. Канал связи
Характеристики системы связи в значительной мере зависят от параметров канала вязи, который используется для передачи сообщений. Исследуя пропускную способность канала, считается, что его параметры сохраняются постоянными. Однако большинство реальных каналов обладают переменными параметрами. Параметры канала, как правило, изменяются во времени случайным образом. Случайные изменения коэффициента передачи канала m вызывают замирания сигнала, что эквивалентно воздействию мультипликативной помехи.
Однородный симметричный канал связи полностью определяется алфавитом передаваемого сообщения, скоростью передачи элементов сообщения u и вероятностью ошибочного приема элемента сообщения р (вероятностью ошибки).
Условие К. Шеннона должно выполняться, то есть производительность источника должно быть меньше пропускной способности канала, что позволит передавать информацию по данному каналу связи. Для некодированного источника это условие выполняется также, так как производительность некодированного источника меньше производительности оптимально закодированного источника.
Передача сигналов s(t) осуществляется по неискаженному каналу с постоянными параметрами и аддитивной флуктуационной помехой n(t) с равномерным энергетическим спектром G0 (белый шум).
Сигнал на выходе такого канала можно записать следующим образом:
![]() ;
; ![]()
Требуется:
1. Определить мощность шума в полосе частот ![]()
2. Найти отношение средней мощности сигнала к мощности шума
3. Найти по формуле Шеннона пропускную способность канала в полосе Fк
4. Определить эффективность использования пропускной способности канала Fс, определить её как отношение производительности источника H´ к пропускной способности канала С.
1. График спектральной плотности мощности квазибелого шума имеет вид:
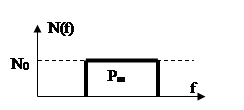
Рис. 7.1. График спектральной плотности мощности квазибелого шума
Тогда мощность шума в полосе частот Fк равна:
![]()
![]()
2. Для двоичных равновероятных символов ![]() и
и ![]() их средняя мощность будет равна:
их средняя мощность будет равна:
![]()
где ![]() и
и ![]() – энергия сигналов; Т – длительность сигналов.
– энергия сигналов; Т – длительность сигналов.
Энергия сигнала определяется как 
При ДФМ ![]() , следовательно:
, следовательно:


![]()
Но так как мы используем не всю мощность её сигнала, а только 95% всей её мощности, то
![]()
Тогда отношение средней мощности сигнала к мощности шума равно:
![]()
3. Пропускная способность канала связи найдем по теореме Шеннона:
4. Найдем эффективность использования пропускной способности канала связи:
![]()
8. Демодулятор
В демодуляторе осуществляется оптимальная по критерию максимального правдоподобия некогерентная обработка принимаемого сигнала ![]() .
.
Требуется:
1. Записать правило решения демодулятора, оптимального по критерию максимального правдоподобия.
2. Записать алгоритм работы и нарисовать структурную схему оптимального демодулятора для заданного вида модуляции и способа приема.
3. Вычислить вероятность ошибки ![]() оптимального модулятора.
оптимального модулятора.
4. Определить как нужно изменить энергию сигнала, чтобы при других видах модуляции и заданном способе приема обеспечить вычисленное значение вероятности ошибки ![]() .
.
1. Так как все символы передаются равновероятно, то правило максимального правдоподобия имеет вид:
![]() при
при ![]() ,
,
где  – отношение правдоподобия
– отношение правдоподобия
![]() – функция правдоподобия i-той гипотезы;
– функция правдоподобия i-той гипотезы; ![]() – функция правдоподобия, что никакой сигнал не передавался.
– функция правдоподобия, что никакой сигнал не передавался.
2. Для некогерентного приема при ДФМ алгоритм работы оптимального по критерию максимального правдоподобия, может быть представлен в виде:
Vi – отсчет огибающей в момент Т на выходе фильтра, согласованного с сигналом si (t).
z(t) – принимаемый сигнал с флуктационной помехой n(t) с равномерным энергетическим спектром G0 «белый шум».
si (t) – сигнал сопряженный по Гильберту, т.е. сигнал, у которого фаза смещена на 90°
При ДФМ Е0 = Е1 , поэтому алгоритм оптимального когерентного приема для двоичной системы можно записать: V1 >V0 ; при выполнении этого неравенства, принятым считается сигнал s0 (t), а при невыполнении этого неравенства принятым считается сигнал s1 (t).
Кроме того, т. к. при ДФМ информационный параметр сигнала определяется двумя соседними элементами [(n-1) – м на интервале [-Т; 0] и n-м на интервале [0; Т]], то оптимальный алгоритм следует записать в виде:

Приходящий сигнал s(t) на двух тактовых интервалах можно представить как:
![]() (при передаче 0)
(при передаче 0)
![]() (при передаче 1)
(при передаче 1)
После подстановки этих выражений в алгоритм получим алгоритм приема в виде:
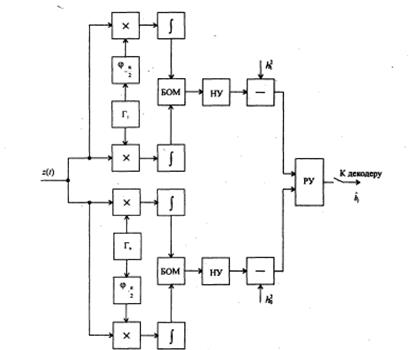
Рис. 8.1. Схема реализации оптимального приема дискретных сообщений при неопределенной фазе сигнала
X
– перемножитель; Г
– генератор опорных сигналов ![]()
900
– преобразователь Гильберта; ![]() - интегратор; БОМ –
блок определения модуля; РУ –
решающее устройство.
- интегратор; БОМ –
блок определения модуля; РУ –
решающее устройство.
3. Вероятность ошибки оптимального когерентного демодулятора для канала с аддитивным белым шумом при передаче двоичных сообщений определяется следующим выражением:
![]()
4. При АМ ![]() , следовательно, энергию сигнала необходимо увеличить в 4 раза.
, следовательно, энергию сигнала необходимо увеличить в 4 раза.
При ЧМ ![]() , т.е. энергию нужно увеличить в 2 раза
, т.е. энергию нужно увеличить в 2 раза
9. Декодер
В декодере процесс декодирования осуществляется в 2 этапа. На 1-м этапе производится обнаружение ошибок в кодовой комбинации. Если ошибок в кодовой комбинации не обнаружено, то на 2-м этапе из нее сначала выделяются к информационных двоичных символов, а затем к-разрядная двоичная кодовая комбинация преобразуется в импульс, высота которого соответствует квантованному уровню переданного сообщения.
В случае обнаружения ошибки в кодовой комбинации исправляется наиболее ненадежный символ. Информация о степени надежности символов в кодовой комбинации поступает в кодер из демодулятора.
Дешифратор (декодер) – устройство, преобразующее двоичный код в позиционный (или иной). Другими словами, дешифратор осуществляет обратный перевод двоичных чисел. Единице в каком-либо разряде позиционного кода соответствует комбинация нулей и единиц в двоичном коде, а отсюда следует, что для преобразования необходимо иметь не только прямые значения переменных, но еще и инверсии.
Требуется:
1. Оценить обнаруживающую ![]() и исправляющую
и исправляющую ![]() способности кода (n, k) с одной проверкой на четность.
способности кода (n, k) с одной проверкой на четность.
2. Записать алгоритм обнаружения ошибок.
3. Определить вероятность не обнаружения ошибки ![]()
4. Предложить метод определения наименее надежного символа из п символов двоичной комбинации.
1. Обнаруживающая и исправляющая способности кодов определяются минимальным кодовым по Хеммингу между кодовыми комбинациями
![]()
Данный код обнаруживает все нечетные ошибки, т. к. это код с проверкой на четность.
Код гарантировано обнаруживает q 0 <а- 1=1 ошибку, а гарантировано исправляет qu <( d - 1)/2=0.5, т.е. вообще ничего не исправляет.
2. При кодировании уровней квантованного сообщения был использован простейший систематический код (n, k), который получался путем добавления к комбинации k=n-l информационных символов одного проверочного, образованного в результате суммирования по модулю 2 всех информационных символов. После этого получается кодовая комбинация с четным числом единиц, т.е. комбинация с четным весом. Данный код способен обнаружить лишь ошибки нечетной кратности. Для этого в принятой комбинации подсчитывается число единиц и проверяется на четность. Если в принятой комбинации обнаружена ошибка (нечетный вес), то комбинация считается запрещенной.
3. Вероятность не обнаружения ошибки при декодировании с одной проверкой на четность при условии, что мы ничего не исправляем, равна:
![]()
![]()
![]() 1.107E-4
1.107E-4
Вероятность обнаружения ошибки при таком алгоритме декодирования равна:
![]()
![]()
![]() 0.016
0.016
4. При демодуляции в РУ результат операции

сравнивается с 0 (если <0, то передавалась 1, если![]() 0, то 0). Наименее надежным будет символ, у которого модуль этого выражения будет наименьшим. Иными словами, у которого разность фаз между соседними сигналами s
(
t
)
будет более остальных близка к
0, то 0). Наименее надежным будет символ, у которого модуль этого выражения будет наименьшим. Иными словами, у которого разность фаз между соседними сигналами s
(
t
)
будет более остальных близка к ![]() .
Для регистрации наименее надежного символа в РУ следует поместить которое фиксировало бы наименьший модуль выражения из всех n
символов и отправляло бы в декодер информацию о номере наименее надежного символа. Такая бы операция повторялась бы для каждых п символов.
.
Для регистрации наименее надежного символа в РУ следует поместить которое фиксировало бы наименьший модуль выражения из всех n
символов и отправляло бы в декодер информацию о номере наименее надежного символа. Такая бы операция повторялась бы для каждых п символов.
10. Фильтр-восстановитель
Фильтр-восстановитель представляет собой фильтр нижних частот с частотой среза Fср.
Требуется:
1. Определить Fср
2. Изобразить идеальные амплитудно-частотные и фазо-частотные характеристики фильтра-восстановителя.
3. Найти импульсную реакцию g(t) идеального фильтра-восстановителя. Начертить график g(t).
1. Частоту среза фильтра-восстановителя найдем по теореме Котельникова:
![]()
2. Идеальная АЧХ фильтра-восстановителя имеет вид:
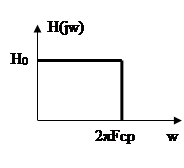
Рис. 10.1 Идеальная АЧХ фильтра-восстановителя.
Идеальная ФЧХ фильтра-восстановителя имеет вид:
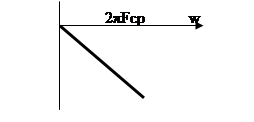
Рис. 10.2. Идеальная ФЧХ фильтра-восстановителя
3. Найдем импульсную реакцию фильтра-восстановителя
Пусть ![]() ,
, ![]() с,
с,

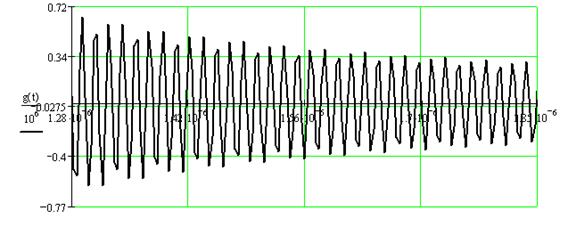
Рис. 10.3.График импульсной реакци фильтра-восстановителя

11. Принципиальная схема фазового модулятора
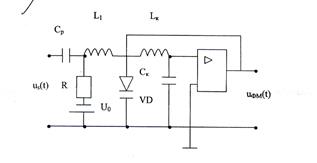
Рис. 11.1 Принципиальная схема фазового модулятора
Наиболее просто ЧМ несущего колебания можно осуществить путем электронной (как правило, мгновенной) перестройки резонансной частоты колебательного контура автогенератора. В практических радиоэлектронных схемах это выполняется с помощью нелинейного полупроводникового элемента – варикапа. Барьерная емкость С p-n-перехода варикапа существенно зависит от приложенного напряжения и определяется ВАХ С(u).
Для реализации ЧМ необходимо по закону модулирующего сигнала изменять частоту несущего колебания. На рис. 11.1 в схеме фазового модулятора автогенератор, вырабатывающий в отсутствие модулирующего сигнала несущее колебание ![]() . В этой схеме индуктивность L
. В этой схеме индуктивность L![]() , емкость С
, емкость С![]() и варикап VD образуют колебательный контур, резонансная частота которого равна несущей частоте. Перестройка частоты генерируемых колебаний достигается в модуляторе путем изменения емкости варикапа.
и варикап VD образуют колебательный контур, резонансная частота которого равна несущей частоте. Перестройка частоты генерируемых колебаний достигается в модуляторе путем изменения емкости варикапа.
При отключенном модулирующем сигнале емкость варикапа определяется постоянным напряжением смещения U![]() и равна С
и равна С![]() , если же на входе автогенератора действует гармонический сигнал
, если же на входе автогенератора действует гармонический сигнал ![]() , то емкость варикапа С(t) будет изменяться во времени относительно С
, то емкость варикапа С(t) будет изменяться во времени относительно С![]() почти по гармоническому закону. По такому же закону начнет перестраиваться и резонансная частота колебательного контура и, соответственно, частота выходного сигнала, если ее девиация не велика.
почти по гармоническому закону. По такому же закону начнет перестраиваться и резонансная частота колебательного контура и, соответственно, частота выходного сигнала, если ее девиация не велика.
12. Принципиальная схема фазового демодулятора
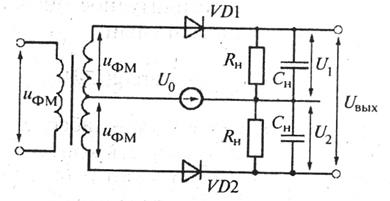
Рис. 12.1. принципиальная схема фазового демодулятора
Схема фазового детектора преобразует ФМ-колебания в низкочастотное напряжение, изменяющееся по закону модулирующего сигнала. Напряжение на выходе ФМ-детектора определяется разностью фаз двух сравниваемых сигналов (рис. 12.1)
ФМ-колебания ![]() и опорного напряжения
и опорного напряжения ![]() , вырабатываемого генератором опорного напряжения.
, вырабатываемого генератором опорного напряжения.
Амплитуды напряжений на входах диодов можно определить с помощью векторной диаграммы (рис 12.2).
![]()
Рис. 12.2. Векторная диаграмма
Из нее следует, что
![]()
![]()
Полученные сигналы затем преобразуются АМ-детекторами с коэффициентом передачи kД , и на нагрузках схемы возникают два напряжения: U1 =kД UD 1 и U2 =kД UD 2 .
Результирующее напряжение на выходе фазового детектора:
![]() Uвых
=U1
-U2
Uвых
=U1
-U2
Амплитуду опорного напряжения в фазовых детекторах выбирают намного больше амплитуды ФМ-колебания, т.е. U0 >>UФМ (обычно в 3–5 раз и более). Это делается для «вывода» полезного сигнала из напряжения шумов, поскольку они часто соизмеримы по амплитуде и сигнал может быть искажен. В этом случае:
Uвых
=2kД
UФМ
cos![]()
Из этого соотношения следует, что низкочастотное напряжение на выходе фазового детектора изменяется практически в соответствии с фазой ФМ-колебания.
Вывод
В данной работе были проведены исследования основных характеристик системы передачи сообщений. При расчете модулятора и демодулятора одним из основных параметров является ДФМ-модуляция, используемая во многих приборах. Работа содержит структурные и принципиальные схемы элементов системы передачи с пояснениями, по которым можно разобрать принцип работы того или иного устройства.
Основные параметры системы передачи довольно устойчивы, такая система может иметь место в радиотехнике – это можно проверить по расчетам.
· Значение плотности вероятности W(а)=0.12
· Математическое ожидание М случайного процесса а(t) М=4.3В
· Дисперсию или математическое ожидание квадрата D случайного процесса a(t) D=24,23 В^2
· Шаг квантования по времени ![]() =0.8 мкс
=0.8 мкс
· Число уровней квантования L=55.33
· Средняя мощность шума квантования Ршк=1.875*10
· Энтропия Н(А)=6 бит
· суммарная энтропия сообщений, переданных за единицу времени Н`=7,5 Мбит/с
· минимальное значение к, необходимое для кодирования всех L уровней квантованного сообщения a(t1 ) к=6
· избыточность кода с одной проверкой на четность Рк=0.14
· Число двоичных символов, выдаваемых кодером в секунду ![]() =8.75Мбит/c
=8.75Мбит/c
· Длительность двоичного символаТ=0.11 мкс
· Частота несущей f0 =909 МГц
· условная ширина спектра сигнала 18,18
· Условная ширина энергетического спектра 36,36
· мощность шума Рш=26,17Вт
· Пропускная способность канала связи С=93.58 Мбит/c
· эффективность использования пропускной способности канала связи Кс=0.08
· Вероятность ошибки р=0.002
В технике применяется достаточно много видов модуляций и для выбора наиболее подходящей необходимо производить расчеты, используя разные модуляции. Это даст возможность сравнить и дать оценку, какая модуляция больше подходит для использования в данной системе передачи.
Результаты, полученные при расчетах, дают действующую картину работы всех элементов при передаче сообщения, его преобразования и подтверждают возможность таких процессов.
Список литературы
1. С.И. Баскаков: «Радиотехнические цепи и сигналы» – М.: Высшая школа, 2005.
2. Зюко А.Г., Кловский Д.Д., Коржик В.И., Назаров М.В., под ред. Кловского Д.Д. Теория электрической связи, – М.: Радио и связь, 1999 г.
3. В.И. Каганов: «Радиотехнические цепи и сигналы» – М.: Горячая линия – Телеком, 2004.
4. Нефедов В.И. Основы радиоэлектроники и связи, – М.: Высшая школа, 2005 г.