| Скачать .docx |
Реферат: Датчики угла поворота
1. Введение
Промышленная электроника используется в различных отраслях народного хозяйства, науки и техники. Наряду с тенденцией автоматизации технологических и производственных процессов на базе вычислительной техники, современная промышленная электроника стала наиболее распространённой.
Базовой системой любой современной автоматической системы управления производственным процессом [4], является система автоматического контроля, позволяющая получать измерительную информацию о режимных параметрах процессов…
Научной основой систем автоматического контроля являются различные принципы измерений параметров технологических процессов, а технической базой этих систем служат средства измерений и преобразований соответствующих параметров, устройства для автоматизации производственных процессов, содержащие в себе ряд элементов, служащих для измерения параметров процесса. Этим элементом автоматической системы является датчик.
В настоящее время датчики разрабатываются во многих исследовательских и опытно-конструкторских организациях. Множество специалистов, в своей работе, сталкивается с выбором конкретных датчиков.
Разнообразие технологических процессов приводит к необходимости иметь широкий выбор датчиков, которые должны соответствовать требованиям, характерным для всех устройств автоматики. Они должны иметь: высокую чувствительность, точность, быстродействие, надёжность, прочность, сравнительно малые размеры и т.д.
Данный реферат включает в себя обзор шести датчиков угла поворота. Цель этого реферата – приобретение умения пользоваться патентной литературой, делая сравнительный анализ, давая экономическую оценку, навыков по оформлению технической литературы, а также приобретение способности анализировать процессы, происходящие в элементах устройства.
2. Описание конструкции датчиков
2.1 Датчик индукционный бесконтактный угла поворота
Формула изобретения.
1. Индукционный бесконтактный датчик угла поворота [1], содержащий ферромагнитный статор с пазами на его внутренней поверхности, размещённую в паре его диаметрально расположенных пазов обмотку возбуждения, размещённую в его других пазах выходную обмотку и двухполюсный ферромагнитный ротор с длиной Т полюсной дуги, отличающийся тем, что, с целью расширения функциональных возможностей путём изменения вида его выходной характеристики в функции угла поворота ротора, пазы для размещения выходной обмотки расположены с угловым смещением ± g относительно диаметрально расположенных пазов с обмоткой возбуждения. 2. Датчик по п. 1, отличающийся тем , что, с целью повышения выходной характеристики в виде симметричной треугольной зависимости, полюсная дуга Т= p /2 , а угловое смещение g = p /2 .
Датчик индукционный бесконтактный. Вид общий

Рис. 1. 1 – ферромагнитный статор; 2 – двухполюсный ферромагнитный ротор; 3-5 и 3¢ -5¢ - пазы; 6, 6¢ - обмотка возбуждения; 7, 7¢ - выходная обмотка; Т – ширина полюсной дуги; g - угловое смещение пазов выходной обмотки относительно диаметрально расположенных пазов с обмоткой возбуждения;q - угол поворота ротора.
3. Датчик по п. 1, отличающийся тем , что, с целью повышения выходной характеристики в виде пилообразной зависимости с зоной нечувствительности G , полюсная дуга Т= p /2 , а угловое смещение g=0,5(p /2 -G).
4. Датчик по п. 1, отличающийся тем , что, с целью повышения выходной характеристики в виде трапецеидальной зависимости с длиной B плоского горизонтального участка, полюсная дуга Т= B + p /2 , а угловое смещение g = p /2 .
Принцип действия
При подключении обмотки возбуждения к источнику переменного напряжения (см. рис.3) начинает вращаться двухполюсный ферромагнитный ротор, который вызывает магнитную индукцию. С выходной обмотки снимают выходное напряжение(Uвых. ), которое зависит от угла q поворота ротора, а также определяется конструктивными параметрами Т , g .
Вывод: Изобретение относится к измерительно-преобразовательной технике, а именно к индукционным датчикам угла, выходное напряжение которых изменяется по требуемому закону при повороте ротора, и может найти применение в качестве первичных датчиков информации в аналоговых и дискретных системах. Данный датчик очень прост по конструкции и способен показывать разные выходные характеристики (треугольная, пилообразная и трапецеидальная зависимости). Датчик имеет относительную дешевизну при изготовлении. Выходное напряжение изменяется при повороте на угол q = p /2 .
2.2 Датчик индукционный бесконтактный угла поворота с цилиндрическим ротором
Формула изобретения.
Индукционный бесконтактный датчик угла поворота [2], содержащий ферромагнитный ротор с Ш – образным поперечным сечением, размещённые на его среднем стержне две соединённые последовательно согласно катушки, образующие выходную обмотку, и явнополюсный ферромагнитный ротор, отличающийся тем , что, с целью упрощения конструкции, ротор выполнен цилиндрическим, полюса образуют на его поверхности выступ в виде одного витка винтовой спирали, статор установлен так, что его продольная ось симметрии, проходящая вдоль среднего стержня, параллельна оси ротора, а его длина равна удвоенной ширине полюсного выступа.
Датчик индукционный бесконтактный угла поворота с цилиндрическим ротором. Вид общий.

Рис. 2. 1 – статор; 2 – ротор; 3 – выступ ротора; 4 – первичная обмотка; 5 – вторичная обмотка; 6 – паз статора; t - длина полюса; d - ширина полюса; q - угол поворота ротора; Ů - переменное напряжение; Uвых. - выходное напряжение.
Принцип действия.
К источнику переменного напряжения подключается статор (см. рис.2). При этом соединённый с ним ротор начинает поворачиваться на угол q
. В результате возникает магнитная индукция, которая вызывает в выходной обмотке статора ЭДС (выходное напряжение). Если статор в равной мере перекрывает парные части выходной обмотки, то Uвых.
= 0. Рабочий диапазон углов поворота ротора равен 
Вывод: Изобретение относится к измерительно-преобразовательной технике, а именно к индукционным бесконтактным датчикам угла, предназначенным для преобразователя угла поворота ротора в электрическое напряжение, и может найти применение в качестве первичного датчика информации в аналоговых и дискретных (цифровых) системах. Датчик прост по конструкции и производству. Он относительно дешёвый. Парные части выходной обмотки соединены встречно. Один оборот ротора соответствует одному шагу винтового выступа, а распределение магнитной индукции зависит от угла q поворота ротора.
2.3 Датчик трансформаторный угла поворота с цилиндрическим ротором
Формула изобретения.
Трансформаторный датчик угла поворота [3], содержащий ферромагнитный цилиндрический ротор, ферромагнитный статор, выполненный в виде полного цилиндра с торцевыми крышками, и размещённые на нём обмотки возбуждения и измерения, отличающийся тем , что, с целью повышения точности измерения путём увеличения чувствительности, он снабжён двумя парами пластин, выполненных из немагнитного материала с высокой электропроводностью, одна из пар размещена на внутренних поверхностях крышек статора симметрично относительно поперечной оси датчика, другая – на основаниях ротора диаметрально противоположно относительно продольной оси датчика, а обмотки возбуждения и измерения размещены в кольцевых пазах торцовых крышек статора.
Датчик трансформаторный с цилиндрическим ротором. Вид общий.

|
|
|
|
|
|
|
Принцип действия.
К источнику переменного напряжения подключается статор (см. рис.3). При этом соединённый с ним ротор, находящийся на вале, начинает поворачиваться. В результате этого возникает магнитная индукция в обмотках возбуждения, которая фиксируется обмотками измерения. При повороте ротора на один градус, датчик фиксирует изменения магнитной индукции, тем самым показывает этот поворот.
Вывод: Данный датчик относится к измерительной технике и позволяет повысить точность измерения угла поворота путём увеличения чувствительности за счёт повышения градиента магнитной проницаемости измерительной цепи трансформаторного датчика угла поворота, и может быть использован для различных механизмов, где требуется определить точное значение угла поворота. Также он может быть использован для контроля возвратно-вращательных движений. Конструкция данного датчика очень проста, что делает его конкурентно способным среди других датчиков такого типа. Он относительно дешёвый в производстве, так как материалы, из которых он изготовлен, легко сделать.
2.4 Датчик ёмкостной угла поворота
Формула изобретения.
Емкостной датчик угла поворота [4], содержащий пары секторных пластин, разделенных зазором, отличающийся тем , что, с целью повышения чувствительности и точности датчик снабжен цилиндрическим ротором, выполненным из диаметрально наэлектризованного электрета и подсоединяемым к контролируемому объекту в процессе измерения, и сегнетопленкой, размещенной в зазоре между секторными пластинами, а пары секторных пластин выполнены полуцилиндрическими и закреплены под углом 90° одна к другой.
Датчик ёмкостной угла поворота. Вид общий.
|
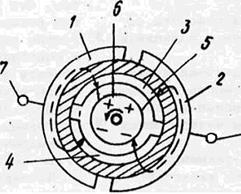
Рис 4. 1,2,3,4 - полуцилиндрические секторные пластины; 5 – сегнетоплёнка; 6 – цилиндрический ротор; 7 – электрические выводы.
Принцип действия.
В положении, указанном на чертеже (см. рис.4), линии электростатической индукции, исходящие из ротора 6, наводят на внутренней поверхности пластины 3 отрицательный заряд, а на внешней - положительный. Далее линии электростатической индукции проходят через сегнетопленку 5, расходятся по пластинам 1 и 2 и через пластину 4 возвращаются в ротор 6. Диэлектрическая проницаемость сегнетопленки 5 будет при этом минимальной, минимальной будет и емкость всего датчика между выводами 7. При повороте ротора 6 на 90° поток линий электростатической индукции сразу разводится и замыкается через пластины 3 и 4. Емкость датчикабудет минимальной. Датчик может быть включен в любую измерительную схему - потенциометрическую, мостовую, генераторную и т.д.
Вывод: Изобретение относится к контрольно - измерительной технике и может быть использовано для измерения угла поворота объектов. Недостатками этого датчика являются низкая чувствительность и невысокая точность, обусловленная влиянием изменения величины зазора между пластинами. Цель изобретения - повышение чувствительности и точности. Поставленная цель достигается тем, что датчик снабжен цилиндрическим ротором, выполненным из диаметрально наэлектризованного электрета и подсоединяемым к контролируемому объекту в процессе измерения, и сегнетопленкой, размещенной в зазоре между секторными пластинами, а пары секторных пластин выполнены полуцилиндрическими и закреплены под углом 90° одна к другой.
2.5 Датчик бесконтактный реверсивный угла поворота
Формула изобретения.
Бесконтактный реверсивный датчик угла поворота [5], содержащий сельсины, работающие в режиме трансформатора, один из которых жестко связан с контролируемым валом, вентили и фильтры, отличающийся тем , что, с целью измерения знакопеременного угла поворота вала и увеличения надежности работы, датчик снабжен логическими схемами «И», «НЕ», триггером, пороговыми устройствами и времязадерживающей и формирующей цепочкой, валы роторов сельсинов жестко связаны между собой и повернуты один относительно другого на некоторый угол, обмотки возбуждения сельсинов подключены к источнику питания, соответствующие фазовые выходы роторных обмоток каждого сельсина соединены через последовательно включенные вентили, фильтры и пороговые устройства с одними входами схем «И» и через схемы «НЕ» подключены к другим входам этих же схем «И», выходы которых непосредственно и через схему «НЕ» подключены к входам триггера, а выход одного из пороговых устройств - к входу времязадерживающей и формирующей цепочки.
Датчик бесконтактный реверсивный угла поворота. Схема функциональная.
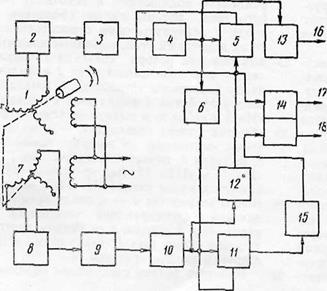
Рис.5 1 – сельсин; 2,8 – выпрямительный мост; 3,9 - фильтр; 4,10 – пороговое устройство; 5,11 – вход схем «И»; 6,12 – вход схем «НЕ»; 7 – ротор сельсины; 13 – времязадерживающая и формирующая цепочка; 14 – триггер; 15 – вход триггера.
Принцип действия.
При вращении ротора сельсина 1 (см. рис.5) выходной сигнал с его фазовой обмотки представляет собой переменное напряжение с частотой питающей сети, амплитуда которого изменяется от нуля до максимума и является синусоидальной функцией угла поворота ротора. Выходной сигнал сельсина 1 преобразуется выпрямительным мостом 2 и фильтром 3 в соответствующий пульсирующий сигнал, период пульсации которого зависит от угловой скорости ротора. Сигнал с выхода фильтра 3 поступает на пороговое устройство 4 и преобразуется в прямоугольные импульсы. Аналогично формируются прямоугольные импульсы из выходного сигнала, снимаемого с фазовых обмоток ротора сельсина 7. При вращении контролируемого вала, например, в левую сторону схема работает следующим образом.
При наличии сигнала на выходе порогового устройства 4 и при отсутствии сигнала на выходе порогового устройства 10 схема 5 вырабатывает импульс, который переключает триггер 14, при этом на выходе 17 появляется сигнал, характеризующий данное направление вращения контролируемого вала. С запаздыванием по отношению к фронту импульсного сигнала на выходе времязадерживающей и формирующей цепочки 13 вырабатывается импульс, характеризующий с принятой дискретностью произведенный угол поворота вала. Импульсы на выходе 16 вырабатываются с запаздыванием по отношению к фронту импульсного сигнала, характеризующего направление вращения вала, что обеспечивает надежное определение направления вращения и величину угла поворота последнего по числу импульсов. При противоположном направлении вращения контролируемого вала аналогично работают элементы 7 —15, в результате чего на выходе 18 вырабатывается сигнал данного направления вращения вала, а на выходе 16 вырабатываются импульсы, число которых пропорционально произведенному углу поворота. В этом случае так же, как и при рассмотренном направлении вращения контролируемого вала, вначале вырабатывается сигнал на выходе 18, который характеризует направление вращения вала, а затем вырабатываются импульсы на выходе 16.
Вывод: Изобретение относится к измерительной технике и может быть использовано для измерения углов поворота вала в различных устройствах. Предлагаемый датчик отличается от известного тем, что он снабжен логическими схемами «И», «НЕ», триггером, пороговыми устройствами и времязадерживающей и формирующей цепочкой, валы роторов сельсинов жестко связаны между собой и повернуты один относительно другого на некоторый угол, обмотки возбуждения сельсинов подключены к источнику питания, соответствующие фазовые выходы роторных обмоток каждого сельсина соединены через последовательно включенные вентили, фильтры и пороговые устройства с одними входами схем «И» и через схемы «НЕ» подключены к другим входам этих же схем «И», выходы которых непосредственно и через схему «НЕ» — к входам триггера, а выход одного из пороговых устройств — к входу времязадерживающей и формирующей цепочки. Кроме того, роторы сельсинов могут быть сдвинуты между собой на угол j, заключенный в пределах π/2<j <π.
2.6 Датчик трансформаторный угла поворота
Формула изобретения.
Датчик трансформаторный угла поворота [6], содержащий статор с охватывающими пары смежных полюсов – секциями обмотки возбуждения и сдвинутыми относительно них на один полюс секциями измерительной обмотки, дополнительную обмотку и безобмоточный ротор с явновыраженными полюсами, отличающийся тем , что, с целью расширения функциональных возможностей, дополнительная обмотка выполнена в виде двухпоследовательно - встречно соединенных полуобмоток, одна из которых размещена на четных полюсах статора, другая - на нечетных полюсах статора, датчик снабжен регулируемым резистивным элементом, подключенным к выводам полуобмоток.
Датчик трансформаторный угла поворота.
 а
а б
б
Рис.6 а - схема подключения трансформатора; б - схема датчика общая; 1 – кольцевой ферромагнитный статор; 2-5 – пазы; 6-9 – четные и нечетные полюса; 10 – обмотка возбуждения; 11 – измерительная обмотка; 12 – сопротивление нагрузки; 13,14 – дополнительные полуобмотки; 15 – регулируемый резисторный элемент; 16 – переключатель; 17 – резистор; 18 - безобмоточный ферромагнитный ротор.
Принцип действия.
В исходном состоянии переключатель находится в нейтральном положении, электрическая цепь дополнительных полуобмоток разомкнётся и они не будут влиять на работу датчика.
Ротор расположен в исходном положении симметрично относительно полюсов 6, 9 и 7, 8 и перекрывает их одинаковые площади, что приводит к равенству противоположных по фазе ЭДС, наводимых в секциях измерительной обмотки, и соответствует нулевому выходному сигналу датчика.
При угловом перемещении ротора изменяется соотношение площадей, перекрываемых ротором полюсов статора, что приводит к изменению величины магнитных потоков, пересекающих секции измерительной обмотки и наводимых в них ЭДС. В результате на выходе датчика (сопротивление 12) появляется сигнал переменного тока, модуль которого пропорционален величине углового перемещения, а фаза соответствует знаку углового перемещения.
В крайних положениях переключателя одна из дополнительных полуобмоток подключается к переменному резистору резистивного элемента.
Изобретение относится к измерительной технике. Недостатком этого датчика является отсутствие возможностей регулировки положения нуля характеристики преобразования.. Недостатком этого датчика являются ограниченные функциональные возможности, не позволяющие плавно регулировать положение нуля его xхарактеристики преобразования.
3. Технико-экономический анализ
Наиболее важными технико-экономическими показателями для датчиков являются простота в изготовлении, невысокая себестоимость и в тоже время надёжность, качество измерения, точность, быстродействие.
Из шести представленных датчиков наиболее сложным по конструкции является датчик угла, так как при его изготовлении необходима высочайшая точность, остальные довольно просты в изготовлении. В финансовом же отношении все они не дорогие.
По чувствительности и точности датчики можно условно разделить на две группы: высокочувствительные и малочувствительные. К первой группе относятся датчики с электронным преобразованием снимаемого сигнала, такие как трансформаторный датчик угла поворота с цилиндрическим ротором (А.С. № 1281876). Ко второй – датчики, реагирующие на изменение магнитного поля, но не имеющие дополнительных устройств, повышающих точность показаний, такие как индукционный бесконтактный датчик угла поворота с цилиндрическим ротором (А.С. № 2029230), индукционный бесконтактный датчик угла поворота (А.С. № 2029231), датчик ёмкостной угла поворота (А.С. № 905630), датчик бесконтактный реверсивный угла поворота (А.С. № 380944), датчик трансформаторный угла поворота (А.С. № 587318). Сфера применения всех датчиков – это автоматические системы контроля в приборостроении и машиностроении, но области разные. К примеру, в областях высоких технологий, где необходима высочайшая точность показаний, необходимо использовать высокочувствительные датчики, наиболее подходят подобные датчику А.С. № 1281876, так как он надёжен, прост в эксплуатации, точен в измерении.
Список использованной литературы
1. Р. К. Памфилов. Датчик индукционный бесконтактный угла поворота, А. С. № 2029231. Бюллетень «Открытия и изобретения» №39 1989 год.
2. Р. К. Памфилов. Датчик индукционный бесконтактный угла поворота, А. С. № 2029230. Бюллетень «Открытия и изобретения» №42 1995 год.
3. Т. М. Алиев, Н. Т. Агагусейнов, В. Я. Едуш и А. А. Тер-Хачатуров. Датчик трансформаторный угла поворота, А. С. № 1281876. Бюллетень «Открытия и изобретения» №1 1987 год.
4. В. И. Добреньков. Датчик ёмкостной угла поворота, А.С № 905630. Бюллетень «Открытия и изобретения» №6 1982 год.
5. И. Филиппенко, И. А. Савченко, В. И. Зыбайло, Ю. В. Плеханов и В. Д. Сапунов. Датчик бесконтактный реверсивный угла поворота, А.С. № 380944. Бюллетень «Открытия и изобретения» №21 1973 год.
6. М. Г. Савченко, А. В. Мирютов и А. М. Березиков. Датчик трансформаторный угла поворота, А.С. № 587318. Бюллетень «Открытия и изобретения» №57 1976 год.