| Скачать .docx |
Курсовая работа: Система автоматического управления частотно-регулируемого электропривода
Задание на курсовую работу
Цель курсовой работы:
- Получение структурной схемы системы «ТПЧ - АД», и ее дальнейшее упрощение с целью получения передаточной функции по управляющему воздействию.
- Построение графиков статических характеристик для трех способов регулирования в зависимости от нагрузки.
- Исследование устойчивости САУ с помощью критериев устойчивости (критерий устойчивости Найквиста, критерий устойчивости Гурвица, критерий устойчивости Михайлова). Построение ЛАЧХ и ФЧХ. Определение запаса устойчивости системы.
- Построение графиков переходного процесса.
Исходные данные:
САУ переменного тока. Вариант №9.
| U ф.с.м , В |
nc , об / мин |
rc , Ом |
xc , Ом |
rp ’ , Ом |
xp ’ , Ом |
M/M н |
| 220 |
690 |
0,53 |
0,56 |
0,725 |
0,44 |
3,1 |
Глава 1. Описание САУ частотно-регулируемого ЭП
Разработка автоматических систем состоит из следующих этапов: изучение управляемого объекта; определение его характеристик, параметров, условий работы и воздействий, которые он испытывает; формулирование требований, предъявляемых к системе; выбор функциональной схемы, разработка принципиальной схемы автоматической системы, выбор и расчет ее элементов и параметров на основе требований, предъявляемых к статическим свойствам системы; составление структурной схемы, характеризующей динамику системы; исследование устойчивости системы; выбор корректирующих устройств на основе требований, предъявляемых к динамическим свойствам системы (качество процесса управления).
Управление САУ возможно тремя способами:
1) Изменение модуля того или иного вектора;
2) Изменение модуля и аргумента;
3) Изменение проекции вектора на координатную ось.
Отсюда имеем три варианта построения САУ системы «ТПЧ - АД»
1 – Скалярное управление;
2 – Полярное управление (модуль, фаза);
3 – Векторное управление (проекции на оси).
U / f - регулированием, или скалярным регулированием, скорости электропривода с асинхронным двигателем называют регулирование, при котором изменение скорости достигается путем воздействия на частоту напряжения на статоре при одновременном изменении модуля этого напряжения. При U / f – регулировании напряжение и ток рассматриваются как скалярные величины, т.е. используются модули этих величин.
При U / f – регулировании вид механической характеристики определяется тем, как соотносятся между собой частота и значение напряжения питания статора двигателя. Таким образом, частота и напряжение выступают как два управляющих воздействия, которые обычно регулируются совместно. Такой способ регулирования скорости АД называется частотным, а характер согласования напряжения и частоты – законом частотного регулирования.
В значительном числе случаев желаемым законом регулирования считается такой, при котором во всем диапазоне регулирования скорости поддерживается постоянство перегрузочной способности двигателя:
Системы скалярного управления применяются в ЭП с наибольшим диапазоном регулирования скорости, которые работают при малых изменениях нагрузки. На этом участке ошибка регулирования очень мала и она определяется сопротивлением ротора, ![]() и поэтому эти системы выполняются без обратных связей.
и поэтому эти системы выполняются без обратных связей.
Различают три закона скалярного управления, выбор которого зависит от характера изменения нагрузки на валу при изменении скорости:
1. Регулирование при поддержании постоянного потокосцепления статора:
![]() (за счет
(за счет ![]() ),
),
где f – частота напряжения на статоре (Mкрит = const ).
2. Регулирование при постоянстве мощности:
![]()
![]()
3. Закон для вентиляторных нагрузок:
![]()
![]()
1.1 Структурная схема САУ «ТПЧ - АД»
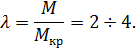
В системе «ТПЧ-АД» в ТП со звеном постоянного тока напряжение сети переменного тока вначале выпрямляется, затем сглаживается и с помощью автономного инвертора напряжения преобразуется в напряжение переменного тока регулируемой частоты и амплитуды. Раздельное управление напряжением и частотой преобразователя сводится к воздействию на управляемый выпрямитель (УВ) для регулирования напряжения ТП и к воздействию на автономный инвертор (АИ) для регулирования частоты.
а) ТПЧ со звеном постоянного тока на основе АИН
Принципиальная схема:
Рис. 1 - Структура преобразователя частоты со звеном постоянного тока и управляемым выпрямителем
Преобразователь частоты включает в себя автономный инвертор напряжения (АИН ) с системой управления инвертора (СУИ )и управляемый выпрямитель (УВ ). На выходе предусмотрен конденсаторный фильтр (Сф ), предназначенный для сглаживания выпрямленного напряжения Ud .
В промышленных установках управляемый выпрямитель питается от сети переменного тока промышленной частоты 50 Гц. Управляющим воздействием для него является сигнал задания напряжения на входе системы управления выпрямителем (СУВ).
Наиболее распространенной схемой силовой части инвертора является трехфазная мостовая схема, состоящая из шести управляемых ключей, которые должны обладать двусторонней проводимостью, и поэтому выполнены на транзисторах, обеспечивающих протекание тока в прямом направлении от плюса напряжения Ud к минусу. Обратная проводимость обеспечивается включенными параллельно транзисторам диодами обратного тока. С их помощью создается цепь для протекания обратного тока в процессе коммутации транзисторов и в тормозном режиме двигателя.
б) Функциональная схема:

Рис. 2 - Функциональная схема ТПЧ на основе АИН
Исходные дифференциальные уравнение по закону Кирхгофа:
![]()
![]()
![]()
в) Структурная схема:
Применим преобразование Лапласа, введем оператор р и
запишем эти уравнения в операторной форме:
![]()
![]()
![]() ;
;
![]()
 |

Рис. 3 - Структурная схема ПЧ на основе АИН
Глава 2. Статические характеристики САУ переменного тока
Получим механическую характеристику системы, а именно зависимость скорости от момента:
![]()
Известно, что критический момент АД вычисляется по формуле:
где n 0 – скорость холостого хода,
А – const ,
x = x 1 + x ’2
Таким образом, критический (max) момент зависит от напряжения и частоты питания в квадрате.
Коэффициент перегрузочной способности:
Mc – момент статической нагрузки.
Из последнего выражения видно, что, чтобы регулирование происходило при постоянстве λ (коэффициент перегрузочной способности), необходимо изменять напряжение и частоту по закону Костенко:
В зависимости от нагрузочной способности могут быть следующие варианты регулирования:
а) регулирование при постоянстве критического момента (M кр - const ):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Получили график механических характеристик для четырех частот:
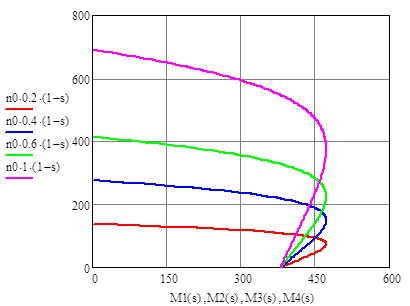
Рис. 4 - График механических характеристик при регулировании при постоянстве критического момента (M кр - const )
б) регулирование при постоянстве мощности, потребляемой двигателем (p=const ):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Таблица полученных в результате расчета значений:
| s |
0.1 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
| M1(s) |
240.1 |
420.3 |
657.9 |
791.7 |
864.6 |
900.6 |
| M2(s) |
239.7 |
417.4 |
643.9 |
761.9 |
817.9 |
838.3 |
| M3(s) |
238.9 |
412.6 |
621.9 |
716.8 |
750.4 |
751.6 |
| M4(s) |
237.8 |
406.2 |
593.4 |
661.9 |
672.7 |
656.6 |
Получили график механических характеристик:
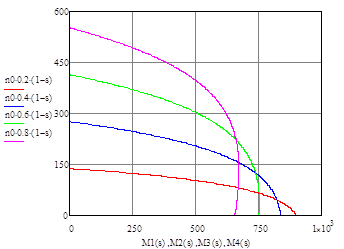
Рис. 5 - График механических характеристик при регулировании при постоянстве мощности (p=const )
в) регулирование по закону вентиляторной нагрузки:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Таблица полученных в результате расчета значений:
| s |
0.1 |
0.2 |
0.4 |
0.6 |
0.8 |
1 |
| M1(s) |
237.779 |
406.181 |
593.432 |
661.994 |
672.658 |
656.631 |
| M2(s) |
238.872 |
412.634 |
621.848 |
716.805 |
750.396 |
751.647 |
| M3(s) |
239.659 |
417.371 |
643.871 |
761.861 |
817.913 |
838.291 |
| M4(s) |
240.134 |
420.265 |
657.85 |
791.72 |
864.588 |
900.577 |
Получили график механических характеристик:
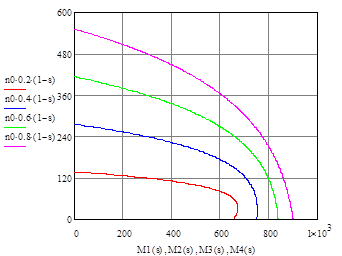
Рис. 6 - График механических характеристик для вентиляторных нагрузок
Глава 3. Динамические характеристики САУ переменного тока
3.1 Получение передаточной функции
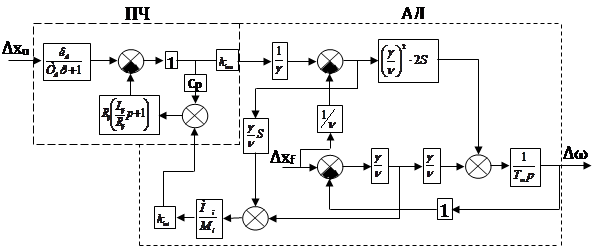 |
Рис. 7 - Структурная схема «ТПЧ-АД»
Расчет ведется при допущениях:
![]()
![]() тогда структурная схема примет вид (рис. 8):
тогда структурная схема примет вид (рис. 8):
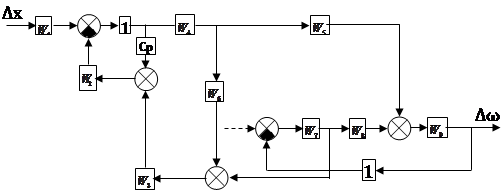 |
Рис. 8
Получим передаточную функцию системы по каналу регулирования напряжения:
Осуществим поэтапное упрощение структурной схемы.
Этап первый (рис. 9):
 |
Рис. 9
Этап второй (рис. 10):
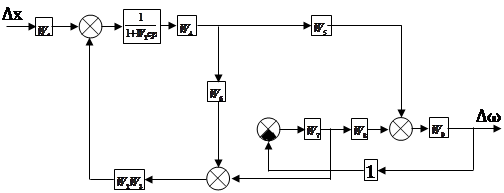 |
Рис. 10
Этап третий (рис. 11):
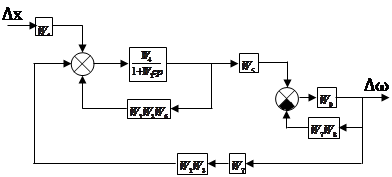 |
Рис. 11
Получили передаточную функцию разомкнутой системы «ПЧ-АД» по каналу управления напряжением ![]()
![]() (3.1)
(3.1)
![]() ;
;
![]() ;
;
![]()
![]() ; W
3
=3.1
; W
3
=3.1
![]()
![]() ;
; 
![]()
![]() ;
; ![]()
![]() ;
; ![]() ;
; ![]() ;
;![]()
Передаточная функция в дробно-рациональном виде запишется
![]() , где a0
, a1
, a2
, a3
, a4
– полиноминальные коэффициенты. Здесь и далее расчет ведется с помощью программы MathCAD
версии 14.0
:
, где a0
, a1
, a2
, a3
, a4
– полиноминальные коэффициенты. Здесь и далее расчет ведется с помощью программы MathCAD
версии 14.0
:
![]()
![]()
![]()
![]()
![]()
Глава 4. Анализ устойчивости САУ
Под устойчивостью системы понимают способность данной системы возвращаться в исходное состояние или переходить в новое устойчивое состояние после исчезновение возмущающего воздействия.
4.1 Проверка устойчивости по критерию Гурвица
1) Необходимым и достаточным условием устойчивости замкнутой системы является наличие положительных коэффициентов в характеристическом уравнении;
2) Главные диагональные миноры тоже должны быть положительны.
Характеристическое уравнение имеет вид:
![]()
где A0 = 0,617 > 0
A 1 = 0,495 > 0
A 2 = 7,495*10-4 > 0
A 3 = 2,513*10-6 > 0
A 4 = 3,75*10-9 > 0
![]()
![]()
![]()
![]()
Так как все коэффициенты и диагональные миноры положительны, то выполняется необходимое и достаточное условие, и, по критерию Гурвица, система устойчива.
4.2 Проверка устойчивости по критерию Михайлова
Для того чтобы САУ оказалась устойчива необходимо и достаточно, чтобы годограф Михайлова (D(jw), p=jw) при изменении частоты управляющего воздействия описывал траекторию, проходящую последовательно через n - квадрантов (n – порядок характеристического уравнения) комплексной плоскости.
При этом точка w=0 должна располагаться на положительной полуоси графика.

![]()
D ( w )= Re ( w )+ jIm ( w )
Результаты расчета в программе MathCad занесла в таблицу:
| w |
0 |
10 |
100 |
250 |
500 |
| Re(D(w)) |
2.125 |
2.051 |
-4.995 |
-30.07 |
49.125 |
| Im(D(w)) |
0 |
4.947 |
46.987 |
84.484 |
-66.625 |
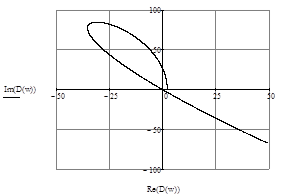
Рис. 12 - Годограф Михайлова
Из рисунка видно, что график функции проходит последовательно через четыре квадранта и точка w=0 находится на положительной полуоси, значит, по критерию Михайлова, система устойчива.
4.3 Проверка устойчивости по критерию Найквиста
Критерий Найквиста позволяет судить об устойчивости замкнутой системы по виду разомкнутой системы.
Замкнутая САУ устойчива, если годограф АФХ разомкнутой САУ при изменении w(0÷![]() ) описывает траекторию, которая не охватывает критическую точку на комплексной плоскости с координатами (-1,
j
0).
) описывает траекторию, которая не охватывает критическую точку на комплексной плоскости с координатами (-1,
j
0).

Занесем полученные результаты в таблицу:
| w,c-1 |
0 |
10 |
100 |
150 |
300 |
| Im(A(w)) |
0 |
-0.301 |
-0.032 |
-0.022 |
-0.016 |
| Re(A(w)) |
2.445 |
0.033 |
-4.36*10-3 |
-4.777*10-3 |
-7.021*10-3 |
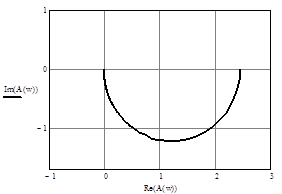
Рис. 13 - Годограф АФХ
АФХ описывает траекторию, которая не охватывает критическую точку, значит, система устойчива.
4.4 Анализ устойчивости по критерию Найквиста на плоскости ЛАЧХ
Логарифмическая амплитудно-частотная характеристика (ЛАЧХ) САУ, которая показывает, как изменяющаяся частота управляющего сигнала сопровождается изменением коэффициента усиления, вычисляется по формуле:
![]()
Фазо-частотная характеристика системы показывает, как с изменением частоты происходит изменение фазы выходного сигнала:
![]()
Рассчитаем значения по формулам с помощью программы MathCAD и полученные результаты занесем в таблицу:
| W,c-1 |
0 |
0,1 |
1 |
5 |
10 |
| L(w) |
7.765 |
7.737 |
5.614 |
-4.546 |
-10.369 |
| φ(w) |
0 |
-0.08 |
-0.677 |
-1.334 |
-1.462 |
По полученным данным строим график ЛАЧХ и ФЧХ:
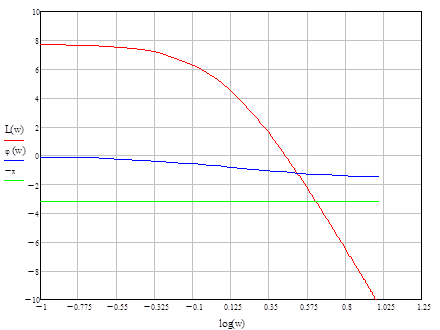
Рис. 14 - ЛАЧХ и ФЧХ
Замкнутая система устойчива, если критическая частота (φ(wкрит ) = -π) больше чем частота среза (L(wср ) = 0).
4.5 Определение запаса устойчивости по фазе
На практике САУ не должна находиться на границе устойчивости, а должна иметь некоторый запас устойчивости по модулю и по фазе.
Запас устойчивости по фазе определяется на комплексной плоскости как угол Δφ между ФЧХ и прямой ( – π (-180º)) на частоте среза (wср ).
Таким образом, запас устойчивости по фазе определяем по графику:
Δφ = 114 º
Глава 5. Расчет переходного процесса
Переходный процесс системы – реакция системы на ступенчатое изменение входного сигнала.
Применив обратное преобразование Лапласа, получим выражение переходной характеристики системы:
![]()
Получим эквивалентную передаточную функцию разомкнутой системы «ТПЧ-АД», для этого изобразим ЛАЧХ, аппроксимированную характеристикой третьего порядка:

Рис. 15 - Аппроксимация ЛАЧХ
Получаем:
![]()
![]()
![]()
![]()
![]()
![]()

Применим обратное преобразование Лапласа
![]()
Получим передаточную характеристику системы:


Таблица полученных значений:
| t,c |
0 |
0,1 |
1 |
3 |
3.8 |
| h(t) |
0 |
1.872*1018 |
7.323*1019 |
1.018*1020 |
1*1020 |

Рис. 16 - График переходной характеристики
По графику переходного процесса определяем время переходного процесса tпп = 3,8мс и перерегулирование σ = 4,3%.
Заключение
В ходе выполнения данной курсовой работы была разработана САУ «ТПЧ-АД». Получена структурная схема и передаточная функция системы по управляющему воздействию.
Были получены уравнения статики для разных режимов регулирования, с помощью программы MathCAD построены статические характеристики для них.
Разработанная САУ была проверена на устойчивость по трем критериям (критерий устойчивости Найквиста, критерий устойчивости Гурвица, критерий устойчивости Михайлова). В результате анализа оказалась устойчива по всем критериям. По критерию Найквиста на комплексной плоскости был определен запас устойчивости системы по фазе, и составил: Δφ = 114º.
Также был построен график переходной характеристики, определено время переходного процесса tпп = 3,8мс и перерегулирование σ = 4,3%.
Список использованной литературы
1. Конспект лекций по ТАУ (6-7 учебный семестр), пр. Сидоров С.Н.
2. Куропаткин П.В. Теория автоматического управления: Учебное пособие для ВУЗов. – М.: «Высшая школа», 1973. – 528 с.
3. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием. – М.: «Академия», 2006. – 272 с.
4. Теория автоматизированного электропривода: Учебное пособие для ВУЗов/ Чиликин М.Г., Ключев ВИ., Сандлер А.С. – М.: Энергия, 1979. – 616 с.
5. Вешеневский С.Н. Характеристики двигателей в электроприводе. – М.: Энергия, 1977. – 432 с.
6. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами: Учебное пособие для ВУЗов. – Л.: Энергоиздат., 1982. – 392 с.