| Скачать .docx |
Дипломная работа: Модернизация блока управления аппарата искусственной вентиляции легких Спирон201
Введение
Аппарат искусственной вентиляции легких «Спирон-201» предназначен для проведения искусственной вентиляции легких у взрослых при реанимации и интенсивной терапии и эксплуатируется в условиях умеренного климата при температуре от + 10 Со до + 35 Со , относительной влажности до 80% при температуре +25 Со и атмосферном давлении от 87 до 107 кПа (от 600 до 800 мм. рт. ст.), а в условиях тропического климата – в помещениях с кондиционированным воздухом. Аппарат предназначен для работы по нереверсивному дыхательному контуру. При использовании с наркозным аппаратом он может работать как по нереверсивному, так и по реверсивному дыхательным. При использовании с наркозным аппаратом он может работать как по нереверсивному, так и по реверсивному дыхательным контурам, но только с взрывобезопасными анестетиками.
Аппарат обеспечивает следующие режимы работы:
– Режим вспомогательной ИВЛ (ВИВЛ);
– Режим управляемой ИВЛ (УВИЛ);
– Режим синхронизированной периодической принудительной ИВЛ (СППВ);
– Режим самостоятельной вентиляции под постоянным положительным давлением (СДПД);
– Режим самостоятельной ИВЛ или ИВЛ вручную мешком (САМД). Совместно с аппаратом возможно использование увлажнителя дыхательной смеси УДС – 60 и волюметра А – Н45084.
С помощью аппарата ИВЛ «Спирон – 201» вентиляцию легких можно производить в режимах:
- управляемой искусственной вентиляции легких (УИВЛ) – оператор управляет дыханием пациента, задавая параметры дыхания;
- вспомогательной ИВЛ – пациент дышит самостоятельно, аппарат включает ИВЛ лишь по истечении определенного промежутка времени;
- синхронизированной периодической принципиальной вентиляции – это комбинация всех режимов самостоятельного дыхания и ВИВЛ;
- самостоятельного дыхания под постоянным положительным давлением – пациент дышит самостоятельно;
самостоятельного дыхания (или вентиляция вручную мешком).
1. Теоретическая часть
1.1 Обзор патентной и научно-технической литературы по надежности и постановка задачи
Целью данного обзора является сравнение аппаратов искусственной вентиляции легких, выпускаемых разными фирмами за рубежом и в России. Был проведен обзор патентов на АИВЛ с 1986 по 1996 годы.
В результате обзора, выяснилось, что основным недостатком как аналогов, так и АИВЛ «Спирон – 201» является низкая надежность, что недопустимо в аппаратах искусственной вентиляции легких ввиду опасности для жизни пациента.
Некоторые фирмы, выпускающие аппараты искусственной вентиляции легких, стремились к повышению надежности, разными способами. Так, например в патенте SU 1641343 надежность обеспечивается путем обеспечения постоянства заданных временных параметров искусственной вентиляции легких. Достигается за счет введения в аппарат дополнительного электромагнитного клапана и сигнализатора апноэ, введения в блок управления формирователя, реле времени, трех схем совпадений, R-S – триггера и схемы укорочения импульсов. Аппарат позволяет автоматически возобновлять ИВЛ при выходе из строя одного из электромагнитных клапанов.
В патенте SU 1192822 с целью увеличения надежности вентиляции легких и повышения стабильности работы устройства, оно снабжено двумя пневмодросселями питания, дополнительной подпружинной мембранной управления, образующей над- и подмембранную камеры, и перепускным клапаном, образующим две дополнительные проточные камеры, установленными в переключающем механизме, при этом надмембранные камеры переключающего механизма связаны трубопроводами между собой и источником сжатого газа.
В патенте SU 1286202 с целью повышения надежности конструкции, переключающий узел включен между штуцером питания и элементом присоединения к пациенту и состоит из последовательно соединенных входного струйного и выходного струйного клапанов, а эжектор выдоха размещен на выходном струйном клапане и сообщен посредством соединительной трубки с выхолным струйным клапаном переключающего узла.
В патенте RU 2020919 повышение надежности достигается за счет того, что в аппарат искусственной вентиляции легких, содержащий генератор вдоха, соединенный с ним пневматически дыхательный контур и электромагнитные клапаны, объединенные в исполнительное устройство, и электронный блок управления введены по числу электромагнитных клапанов формирователи управляющих импульсов, регулируемые стабилизаторы напряжения с управляемыми делителями и мостовые транзисторные схемы.
В SU 1209214 с целью упрощения конструкции и повышения надежности, он снабжен реле, установленным между регулятором параметров дыхания и микропроцессорами вдоха и выдоха, с обмоткой, включенной на выход регулятора, и с нормально замкнутыми и нормально разомкнутыми контактами, связанными соответственно с микропроцессорами вдоха и выдоха, при этом регулятор параметров дыхания включает электронный генератор прямоугольных импульсов.
В патенте SU1075945 упрощение конструкции аппарата и повышение его надежности достигается тем, что исполнительный механизм выполнен в виде соосно расположенных, противоположно направленных закругленными суженными концами конических сопел с узкой щелью между ними и заключенных в камеру, соединенную с редуктором, а на выходе расширенного конца одного из сопел установлен клапан, сообщенный пневматической обратной связью с расширением другого сопла.
В патенте SU 1075945 повышение надежности достигается тем, что в устройстве для искусственного дыхания, содержащем вводимую в рот сменную жесткую дыхательную трубку. Элемент фиксации дыхательной трубки во рту пациента в виде эллиптической шайбы с центральным герметичным вводом дыхательной трубки и узел герметизации носовых ходов, шайба элемента фиксации выполнена эластичной и снабжена краевым утолщением в виде пневматической шины.
Итак, было предложено несколько методов повышения надежности, но нигде в русских патентах не предлагалось повысить надежность электрических схем, а точнее микроконтроллера, в элементах которого заложена программа управления аппаратом.
Были случаи, когда выходы из строя микроконтроллеров приводили пациент к смерти.
Предлагается повысить надежность микроконтроллера, а с ним и всего блока управления, заменив отечественные микросхемы на их зарубежные аналоги, а также путем экранирования блока печатных плат от внешних помех (электромагнитных излучений).
Известны аппараты искусственного дыхания, содержащие механизм вдоха и выдоха, электродвигатель, редуктор, схему управления скоростью электродвигателя, механизм преобразования вращательного движения электродвигателя в возвратно – поступательное движение меха и устройства плавного регулирования частоты и дыхательного объема.
Однако в указанных аппаратах значительную трудность представляет регулирование частоты дыхания и соотношения вдоха и выдоха с помощью управления режимом приводного двигателя.
В патенте 371939 целью изобретения является повышение стабильности и точности работы аппарата при независимом от соотношения вдоха и выдоха регулирования частоты минутной вентиляции, а также управлением режимом вспомогательного дыхания.
Поставленная цель достигается тем, что схема управления скоростью двигателя снабжена жесткой следящей системой и отрицательной обратной связью в виде многоступенчатого делителя напряжения.
Предлагается в качестве следящей системы на выходной вал двигателя поставить тахогенератор, вырабатывающий напряжение, пропорциональное скорости вращения его ротора.
1.2 Описание конструкции и принципа действия аппарата искусственной вентиляции легких
Технические данные.
1. Минутная вентиляция, л/ мин:
– нижний предел 3
– верхний предел не менее 50.
Ступенчатая установка следующих значений минутной вентиляции:
- в интервале от 3 до 10 л/мин включительно – через 0,5 л/мин;
- в интервале от 10 до 30 л/мин включительно – через 1 л/мин;
- в интервале от 30 до 50 л/мин включительно – через 2 л/мин;
- в интервале свыше 50 л/мин – через 5 л/мин;
2. Отклонение по м абсолютной величине установленного на аппарате значения инутной вентиляции от ее действительной величины:
- в диапазоне установленных значений до 10 л/мин включительно – 1,5 л/мин;
- в диапазоне установленных значений свыше 10 л/мин – 10% от действительной величины.
3. Переключение фаз дыхательного цикла в режиме управляемой ИВЛ по времени.
4. Частота вентиляции, 1/ мин:
– нижний предел не более 10
– верхний предел не менее 80.
Ступенчатая установка следующих значений частоты вентиляции;
– в интервале от 10 до 20 включительно через 1 мин;
– в интервале от 20 до 40 включительно через 2 мин;
– в интервале от 40 до 80 включительно через 5 мин.
5. Относительное отклонение по абсолютной величине установленного значения частоты вентиляции от ее действительной величины не должно быть более 2% в диапазоне установленных значений до 20 мин включительно и 4% в диапазоне свыше 20 мин.
6. Аппарат обеспечивает переключение фаз дыхательного цикла вручную с помощью пульта дистанционного управления.
7. Кратковременная звуковая индикация обеспечивается в следующих случаях:
– при достижении величиной рабочего давления установленного значения;
– при попытке установить значения параметров вентиляции вне диапазона регулирования;
– при нажатии на кнопки, расположенные под пустыми полями цифрового табло;
– при попытке установить недопустимые сочетания режимов.
8. Средняя наработка на отказ не менее 2000 ч.
Критерий отказов – это такое состояние аппарата, при котором имеет место хотя бы одно из следующих нарушений:
– невозможно установить минутную вентиляцию в диапазоне от 7 до 30 л/мин;
– невозможно установить частоту вентиляции в диапазоне от 10 до 30 мин-1 ;
– невозможно установить отношение продолжительности вдоха и цикла (33±3)%.
9. Средний срок службы до списания, не менее 4 лет.
10. По электробезопасности аппарат соответствует требованиям ГОСТ 12.2.025 для изделий класса I типа В.
11. Средняя интенсивность эксплуатации – 8 ч. в сутки.
Время непрерывной работы аппарата ограниченно лишь необходимостью периодического проведения обеззараживания дыхательного контура.
12. Питание от сети переменного тока с частотой 50 Гц., с номинальным напряжением 220В при отклонении напряжения сети на ±10% от номинального значения. Мощность не более 500 В·А.
Устройство и принцип действия аппарата .
Аппарат содержит основные блоки: тележка, блок пациента, генератор вдоха, блок управления, увлажнитель, сигнализатор, блок приборный, блок подачи кислорода, блок активного выдоха, отсасыватель. Аппарат содержит следующие съемные узлы: клапан предохранительный, мешок для проведения ИВЛ вручную, отстойники, пульт дистанционного управления, распылитель лекарственных средств.
Блок управления выполнен в виде плоского параллелепипеда, на передней грани которого расположена панель управления (рис. 1.2.1). На панели управления расположены световое (цифровое) табло 6 и световое (аналоговое) табло 9 и органы управления. На табло 6 высвечиваются буквенные обозначения и значения параметров вентиляции, соответствующих установленному режиму вентиляции. Максимальное количество одновременно высвечиваемых параметров – четыре. Кроме того, на этом табло могут высвечиваться словесные обозначения ситуации, а именно: «вдох» во время искусственного вдоха, «АПНОЭ» при проявлении признаков отсутствия вентиляции и «ПУЛЬТ Д.У.» при работе с ПДУ. На аналоговом табло 9, над которым расположена шкала, высвечиваются горизонтальные столбики в верхнем уровне. В нижнем уровне правый столбик является установкой наибольшего давления конца вдоха, левый – отслеживает текущее значение давления в дыхательном контуре. Под верхним горизонтальным столбиком высвечивается точка, определяющая значение ПДВК. В нижнем уровне также два горизонтальных столбика: левый, определяющий уровень давления в момент ожидания попытки, и правый, определяющий установку чувствительности к попытке вдоха пациента. Шкала, расположенная над аналоговым табло 9, представляет собой линейку индикации, масштаб которой для столбиков нижнего уровня в десять раз меньше, чем для столбиков верхнего уровня и светящейся точки.
На панели расположены следующие органы управления:
1. Кнопки 12,13,16,15,14 включения режимов вентиляции:
- Управляемой ИВЛ (УИВЛ);
- Вспомогательной ИВЛ (ВИВЛ);
- Синхронизированной периодической принудительной ИВЛ (СППВ);
- Самостоятельной вентиляции под постоянным положительным давлением (СДПД);
- Самостоятельной ИВЛ или ИВЛ вручную мешком (САМД);
На каждой кнопке имеется светодиод, фиксирующий включение режима; в поле, очерченном вокруг кнопки, расположены записи, определяющие наименование, буквенное обозначение и диапазоны регулирования параметров вентиляции, регулируемых в данном режиме.
– Кнопки 1,19,21,24,25, при нажатии которых аппарат обеспечивает некоторые дополнительные функции, а именно:
– Кнопка 1 на время ее держания в нажатом состоянии обеспечивает высвечивание на цифровом табло значения дыхательного объема вместо минутной вентиляции;
- Кнопка 21 включает активный вдох при УИВЛ;
Кнопка 24 включает питание распылителя лекарственных средств и обеспечивает насыщение дыхательной смеси лекарственной аэрозолью;
- Кнопка 25 включает режим искусственного вздоха при УИВЛ.
2. Кнопки 4 и 5, 3 и 2, 23 и 22, 20 и 18 служат для увеличения и уменьшения значения регулируемых параметров, высвечиваемых на цифровом табло 6, и имеют соответствующую маркировку «▲» и «▼».
3. Кнопки 10 и 11, 7 и 8 служат для регулирования значения установок наибольшего давления конца вдоха и конца выдоха (ПДКВ) на аналоговом табло 9 и имеют маркировку «<» и «>».
Регулятор 17 уровня постоянного положительного давления при СДПД или в фазе самостоятельного дыхания в режиме СППВ.
Блок подачи кислорода содержит ротаметр, обеспечивающий измерение расхода кислорода до 20г/мин, предохранительный клапан, мешок. Регулирование подачи кислорода производится с помощью игольчатого дросселя с ручкой. Предохранительный клапан вдоха имеет поворотную головку на три положения, маркированную на «10», «300» и «закрыто». Положения «10» и «300» соответствуют ограничению давления в мешке на уровне соответственно 0,1 кПа (10 мм. вод. ст.) и 3кПа (300 мм.вод. ст.). В патрубке расположен всасывающий клапан, изготовленный из силиконовой резины, который позволяет подсасывать воздух из атмосферы. На патрубок надет противопылевой фильтр. Блок подачи кислорода имеет резьбовой штуцер для присоединения посредством шланга к источнику сжатого кислорода. Блок подачи кислорода устанавливается на кронштейне с помощью патрубка.
Блок активного выдоха содержит съемный блок разрежения расположенный под крышкой и закрепленный в корпусе с помощью гайки. Кроме того, в корпусе неподвижно закреплен распределитель, обеспечивающий во время выдоха подачу питающего газа в эжектор блока разрежения. Крышка крепится на корпус вручную винтом. На верхнем торце блока активного выдоха расположена рукоятка с маркировкой «» для регулирования разрежения активного выдоха. На передней панели блока расположен штуцер с маркировкой «блок пациента» для присоединения к штуцеру выхода блока пациента и штуцер выхода выдыхаемого газа с маркировкой «ВЫХОД».
Клапан предохранительный состоит из корпуса с седлом, шайбы, барабана с тремя штоками и винтами, которые осуществляют сжатие трех пружин и крышки. Поворотом барабана клапан устанавливается в три фиксированных положения, при которых в окошке корпуса устанавливается маркировка «3», «6» и «10», что соответствует срабатыванию при давлении соответственно 3 кПА, 6 кПа и 10 кПа.
Блок приборный содержит указатель давления УДМ – 60, закрепленный скобой и винтами. В боковое отверстие блока приборного вставлен тройник для присоединения указателя давления к дыхательному контуру и установки вольтметра. В тройнике зажимом закреплен бактериальный фильтр, предохраняющий от инфицирования указатель давления. Кран служит для подключения указателя давления к дыхательному контуру. Штуцер должен быть закрыт заглушкой.
Пульт дистанционного управления служит для переключения фаз дыхательного цикла вручную. ПДУ имеет корпус с клавишей и кнопкой. Удерживая пальцем клавишу, оператор выключает автоматический переключатель фаз в аппарате. Нажимая на кнопку пальцем, он включает фазу вдоха, отпуская кнопку – фазу выдоха. Как только оператор выпускает ПДУ из рук (отпуская тем самым клавишу), аппарат включается в автоматический режим.
Распылитель имеет прозрачный корпус с нанесенной на нем шкалой объема залитого вещества, герметично закрытый крышкой с накидной гайкой. В корпусе герметично установлено сопло, заканчивающееся снаружи резьбовым штуцером.
Штуцер шлангом соединяется с соответствующим штуцером блока пациента. Сопло надет колпачок с вырезами по открытому торцу, опущенному в раствор.
Колпачок имеет на закрытом торце отверстие, соосное отверстию сопла. При подаче в сопло газа под давлением 0,14 Мпа (1,4 кгс/см) в полости колпачка создается разрежение, раствор засасывается по колпачку вверх и вместе с питающим газом в виде аэрозоля через отверстие в закрытом торце колпачка выбрасывается в корпус распылителя и через его патрубок в шланг вдоха. Сепаратор обеспечивает выделение аэрозоля требуемой дисперсности.
В комплект поставки аппарата входит мешок для проведения ИВЛ вручную. Мешок эластичен и после сжатия расправляется самостоятельно со скоростью, обеспечивающей требуемые частоты вентиляции.
Рассмотрим упрощенную функциональную схему аппарата. Схема аппарата содержит следующие блоки: блок подачи кислорода 1, генератор вдоха 2, блок пациента 3, увлажнитель дыхательной смеси 5, блок управления 7, блок приборный 12, отсасыватель 14, сборник секрета 15, блок активного выдоха 16.
Кроме того, в дыхательном контуре установлены предохранительный клапан 4, распылитель 6 лекарственных средств, отстойники 8 и 13, мешок для проведения ИВЛ вручную 17, сигнализатор 18.
Блок подачи кислорода 1 служит для создания дыхательной смеси, обогащенной кислородом. Подачу дыхательной смеси во время вдоха обеспечивает генератор вдоха 2.
Блок подачи кислорода 1 служит для создания дыхательной смеси, обогащенной кислородом. Подачу дыхательной смеси во время вдоха обеспечивает генератор вдоха 2. Особенностью его является независимость объема минутной вентиляции от давления в дыхательном контуре. Блок пациента 3 предназначен для обеспечения различных режимов работы аппарата ИВЛ переключением распределителей и клапанов по сигналам от блока управления 7. Для обеспечения активного выдоха предназначен блок активного выдоха 16, создающий разрежение в дыхательном контуре.
Отсасыватель 14 создает разрежение, необходимое для отсоса секрета (слизистой жидкости) из дыхательных путей пациента. Сборник секрета 15 служит для его накопления.
Блок приборный 12 предназначен для отслеживания давления в дыхательном контуре и объема минутной вентиляции, в дыхательный контур включен предохранительный клапан 4, ограничивающий давление на уровне 3 кПа; 6 кПа; 10 кПа.
Для увлажнения дыхательной смеси служит увлажнитель 5. Последовательно с ним устанавливается распылитель дыхательной смеси 6.
Отстойники 8 и 13, установленные в линиях вдоха и выдоха соответственно, служат для сбора влаги, осаждающейся на внутренней поверхности воздуховодов.
Тройник пациента 10 подсоединен к линиям при помощи гофрированных шлангов 9 и 11, обеспечивающих подвижность пациента в ограниченных пределах.
Сигнализатор 18 подключается к тройнику пациента и вырабатывает аварийный сигнал при отсутствии избыточного давления на выходе тройника пациента. Подробнее эта схема изображена на рис. 1.2.2.
Блок подачи кислорода 1 содержит ротаметр 1.2 и вентиль 1.1 для дозировки подачи кислорода, самодействующий клапан 1.4 для забора воздуха из атмосферы через фильтр 1.6. Кроме того, блок подачи кислорода 1 снабжен резиновым мешком 1.5 и предохранительным клапаном 1.3, предотвращающим чрезмерное раздувание мешка.
Генератор вдоха 2 обеспечивает подачу пациенту дыхательной смеси во время вдоха. Он состоит из воздуходувки 2.2. приводимой в действие от электродвигателя 2.3 и стабилизатора 2.1.
Стабилизатор 271 поддерживает постоянный перепад давления на дросселе 3.3, регулирующем минутную вентиляцию, благодаря чему обеспечивается независимость минутной вентиляции от давления в дыхательном контуре, кроме того, во время выдоха стабилизатор 2.1 соединяет между собой линии нагнетания и всасывания, снижая нагрузку на воздуходувку 2.2. Дроссель 2.4 служит для снижения уровня пульсаций в линии обратной связи. Клапан 2.5 служит для снижения уровня пульсаций в линии всасывания.
Блок пациента 3 содержит дроссель-регулятор вентиляции 3.3, управляемый шаговым двигателем (ШД) 3.2, электромагнитные клапаны (ЭМК) 3.4, 3.7, 3.10, самодействующие клапаны 3.6, 3.9, 3.17, электромагнитные распределители (ЭР) 3.11, 3.13, 3.14, 3.22, фильтры 3.1, 3.5, 3.16, предохранительный клапан 3.8, регулятор 3.21, обратные клапаны 3.18, 3.19, 3.20, 3.23. ЭМК 3.4 в открытом положении сообщает при выдохе легкие пациента с атмосферой. Самодействующий клапан 3.6 предотвращает выдыхание газа, а из легких в линию вдоха, а клапан 3.9 – вдыхание газа из линии выдоха. При самостоятельной вентиляции клапан 3.17 обеспечивает при ИВЛ вручную мешком 17 заполнение мешка при его расправлении свежей смесью из блока подачи кислорода 1 и предотвращает обратный заброс смеси в блок подачи кислорода 1 при сжатии мешка. Клапан УВД 3.12 мембранный, управляется пневматически от мешка 17 и обеспечивает при ИВЛ вручную мешком 17 перекрытие линии выдоха при сжатии мешка, то есть во время вдоха, и сообщение легких пациента с атмосферой при расправлении мешка во время выдоха. ЭР 3.13 в режиме ИВЛ вручную сообщает надмембранное пространство клапана УДВ 3.12 с мешком 17 через бактериальный фильтр 3.16, что предотвращает инфицирование ЭР 3.13. В других режимах ЭР 3.13 включен и сообщает надмембранное пространство клапана УДВ 3.12 с ЭР 3.14 и ЭР 3.11. ЭР 3.14 служит для соединения камеры управления клапана УДВ 3.12 через ЭР 3.13 в одном положении с линией нагнетенная генератора вдоха 2, в другом – через клапан 16.3 с атмосферой либо с линией разрежения блока активного выдоха. Фильтр 3.1 предотвращает инфицирование ЭР 3.14, ЭР 3.11 служит для подключения к камере управления клапана УДВ 3.12 через ЭР 3.13 устройств регулирования давления в указанное камере. Постоянный дроссель 3.15 на входе ЭР 3.14 обеспечивает поступление в линию управления клапана УДВ 3.12 заданного расхода газа из линии нагнетения генератора вдоха 2. Клапан предохранительный 3.8 служит для ограничения максимально положительного допустимого давления в режиме СДПД. Клапан содержит две мембранные камеры: глухую, соединенную с дыхательным контуром, и проточную, подключенную к линии управления клапана УДВ 3.12. Глухая камера образована двумя мембранами: большой и малой, жестко связанных между собой. Мембраны нагружены регулируемой пружиной. В проточной камере расположено сопло, перекрываемое малой мембраной. Штуцер с клапанами 3.19 служит для подвода питающего газа под давлением 400 кПа (4 кгс/1см2 ) к блоку подачи кислорода 1 и сигнализатору 18. Штуцер с клапаном 3.20 – для подвода питающего газа под давлением 400 кПа (4 кгс/см2 ) к отсасывателю 14. Штуцер с клапаном 3.16 – для подвода питающего газа под давлением 400 кПа (4 кгс/см2 ) к аппарату, а также на вход регулятора 3.21, с выхода которого питавший газ под давлением 140 кПа (1,4 кгс/см2 ) через ЭР 3.22 поступает на вход распылителя 6. Штуцер с клапаном 3.23 служит для подвода питающего газа под давлением 400 кПа (4 кгс/см2 ) через ЭР 16.4 на эжектор 16.2 блока активного выдоха 16. Дроссель 3.24 служит для снижения уровня пульсаций в преобразователе давления 7.3.
Блок управления 7 служит для управления всеми ЭМК и ЭВ. Он содержит регулятор положительного давления в режиме СДПД 7.1, обеспечивающий изменения давления в линии управления клапана УДВ 3.12 блока пациента 3; электропреобразователь 7.2, служащий для периодического соединения преобразователя 7.3 с атмосферой, что позволяет существенно снизить ошибку преобразователя 7.3 вследствие дрейфа нуля, поскольку отсчет измеряемых значений в дальнейшем ведется от уровня, измеренного в момент сообщения с атмосферой и принимаемого за нулевой.
Блок приборный 12 содержит указатель давления 12.1 с краном 12.2 включения, вольтметр 12.3 и фильтр 12.4, предотвращающий инфицирование блока приборного. Отсасыватель 14 создает разрежение, необходимое для отсоса секрета из дыхательных путей пациента, он содержит эжектор 14.2 и вентиль 14.1, регулирующий величину разрежения. Сборник секрета 15 служит для накопления секрета, поступающего через аспирационный наконечник 15.2 и шланг отсоса 15.1.
Блок активного выдоха 16 содержит регулятор разрежения 16.1, эжектор 16.2 и клапан самодействующий 16.3, электромагнитный распределитель (ЭР) 16.4.
Эжектор 16.2 служит для создания разрежения в дыхательном контуре при активном выдохе. ЭР 16.4 служит для подачи сжатого газа в эжектор 16.2 во время выдоха. Регулятор разрежения 16.1 представляет собой мембранный клапан, нагруженный регулируемой пружиной. Глухая мембранная камера соединена обратной связью с линией разрежения эжектора 16.2, что предотвращает полное перекрытие седла клапана 16.1 мембраной под действием разрежения. Клапан самодействующий 16.3 служит для быстрого сброса давления в дыхательном контуре в начале выдоха.
1 Работа аппарата в режиме УИВЛ
1.1 Работа аппарата в режиме УИВЛ с нулевым давлением конца выдоха.
ЭМК 3.7 открыт постоянно. ЭМК 3.4 в открытом положении сообщает при вдохе легкие пациента с генератором вдоха 2. ЭМК 3.10 в открытом положении сообщает при выдохе легкие пациента с атмосферой. ЭМК 3.7 и самодействующий клапан 3.6 обеспечивает возможность дополнительного вдоха пациента непосредственно из блока подачи кислорода 1, минуя генератор вдоха 2. Во время вдоха газовая дыхательная смесь из мешка 1.5 блока подачи кислорода 1 засасывается воздуходувкой 2.2 генератора вдоха 2, нагнетается в линию вдоха блока пациента и через дроссель-регулятор 3.3, открытый ЭМК 3.4, увлажнитель 5, отстойник 8. шланг вдоха 9 и тройник пациента 10 вдувается в легкие пациента. Избыток газовой смеси из линии нагнетения воздуходувки 2. 2 сбрасывается через стабилизатор 2.1 в линию всасывания. Переключение аппарата с вдоха на выдох происходит по времени (по частоте). При этом ЭМК 3.4 закрывается, ЭМК 3.10 открывается, происходит выдох. Пациент через тройник 10, шланг выдоха 11, отстойник 13, самодействующий клапан 3.9, ЭМК 3.10, клапан УДВ 3.12 и клапан 16.3 выдыхает в атмосферу.
2. Работа аппарата в режиме УИВЛ с ПДКВ.
В момент выдоха, когда давление в дыхательном контуре равно установленному ПДКВ; ЭР 3.14 соединяет мембранную камеру управления клапана УДВ 3.12 через ЭР 3.13 и фильтр 3.1 с линией нагнетания генератора вдоха 2. Постоянный дроссель 3.15 на входе ЭР 3.14 обеспечивает поступление в линию управления клапана УДВ 3.12 заданного расхода газа из линии нагнетания генератора вдоха 2 и клапан УДВ 3.12 закрывается. Выдох прекращается,
3. Работа аппарата в режиме УИВЛ с паузой вдоха.
В момент вдоха, когда оставшееся до конца вдоха время равно установленной паузе, ЭМК 3.4 закрывается, и вдувание прекращается. ЭНК 3.4 остается также закрытым до истечения времени вдоха, определяемого установленной частотой вентиляции и долей вдоха от времени цикла. По истечении времени вдоха ЭМК 3.10 открывается и происходит выдох.
4. Работа аппарата в режиме УИВЛ с АВ.
В фазе выдоха ЭМК 3.7 закрыт, сжатый газ от внешнего источника питания под давлением 400 кПа (4 кгс/см2 ) через обратный клапан 3.18, ЭР 16.4 и эжектор 16.2 истекает в атмосферу. При этом создается разрежение в линии выдоха, под действием которого газ отсасывается из дыхательных путей пациента, одновременно разрежение через ЭР 3.14 и 3.13 поступает в камеру управления клапана УДВ 3.12 и поддерживает его в открытом состоянии. Изменение значения разрежения осуществляется поворотом рукоятки регулятора 16.1. Обратный клапан 16.3 осуществляет быстрый сброс давления в дыхательном контуре в начале фазы выдоха.
5. Работа аппарата в режиме УИВЛ с ограничением максимального давления конца вдоха.
В момент вдоха, когда давление в дыхательном контуре становится равным заданному значению Рмакс. ЭМК 3.4 закрывается. ЭМК 3.10 продолжает быть закрытым, и вдувание прекращается до истечения заданного времени вдоха, определяемого установленной частотой вентиляции и долей длительности вдоха в дыхательном цикле.
6. Работа аппарата в режиме УИВЛ с помощью пульта дистанционного управления (ПДУ).
При проведении ИВЛ с помощью ПДУ нажатие и удержание клавиши ПДУ переводит аппарат в состояние выдоха. ЭМК 3.4 закрыт, ЭМК 3.10 открыт. Дополнительное нажатие кнопки ПДУ вызывает на время ее нажатия переключение аппарата в фазу вдоха; ЭМК 3.4 открыт, ЭМК 3.10 закрыт. Как только оператор выпускает ПДУ из рук (отпуская тем самым клавишу), аппарат включается в автоматический режим.
7. Работа аппарата в режиме УИВЛ с распылением аэрозоле лекарственных средств. В фазе выдоха сжатый газ под давлением 40 кПа (4 кгс/см2 ) поступает на вход регулятора 3.21, с выхода которого сжатый газ под давлением 140 кПа (1,4 кгс/см2 ) через ЭР 3.22 поступает на вход распылителя 6. Аэрозоль распыляется со шланга вдоха 9. В фазе вдоха аэрозоль из шланга вдоха 9 выносится потоком дыхательного газа в легкие пациента через тройник 10.
Работа аппарата в режиме ВИВЛ
ЭМК 3.7 закрыт постоянно. В момент конца выдоха ЭМК 3.4 закрыт, ЭМК 3.10 открыт. При попытке вдоха пациент создает разрежение в линии, ограниченной с одной стороны клапаном 3.9, а с другой – закрытыми ЭМК 3.4 и 3.7. Созданное разрежение через фильтр 3.5 поступает в электропневмопреобразователь 7.2 блока управления 7 и далее на преобразователь деления 7.3. В блоке управления 7 происходит сравнение создаваемого пациентом разрежения с заданным. Когда разрежение в линии становится равным заданному, происходит переключение аппарата в положение вдоха. При этом ЭМК 3.4 открывается, ЭМК 3.10 закрывается. Переключение с вдоха на выдох происходит по давлению. Когда давление в легких достигает заданного значения (сравнение производится в блоке управления 7), ЭМК 3.4 закрывается, ЭМК 3.10 открывается, происходит выдох и аппарат остается в положении выдоха до поступления попытки вдоха или до окончания установленного времени ожидания попытки. Если в течение 3 сек давление конца вдоха не станет равным заданному, переключение на выдох произойдет автоматически по времени. Такое явление может произойти при неправильном назначении скорости вдувания Q (недостаточном) или при разгерметизации линии пациента. При ВИВЛ также возможно осуществить режим дыхания с ПДКВ. При этом коммутация линии выдоха осуществляется так же, как и при УИВЛ. А разрежение попытки вдоха отсчитывается от уровня давления конца выдоха. При ВИВЛ также возможно распыление аэрозоля лекарственных средств. Оно осуществляется в шланг вдоха 9 во время фазы вдоха.
Работа аппарата в режиме СППВ
При СППВ периодически перемежаются два режима вентиляции: самостоятельное дыхание и один цикл ВИВЛ. Генератор вдоха 2 работает. В фазе самостоятельного дыхания ЭМК 3.4, 3.7 и 3.10 открыты. Если самостоятельное дыхание проводится без повышения уровня давления выше атмосферного, то УР 3.13 и 3.14 соединяют камеру управления клапана УДВ 3.12 через клапан 16.3 с атмосферой. Дроссель-регулятор вентиляции 3.3 перекрыт ИД 3.12. Поток из линии нагнетания генератора вдоха 2 через стабилизатор 2.1 сбрасывается в линию всасывания генератора вдоха 2. Пациент через клапан 3.6, ЭМК 3.7 и клапан 3.17 делает вдох из мешка 1.5 блока додачи кислорода 1 и выдыхает через клапан 3.9, ЭМК 3.10, клапан УДВ 5.12 и клапан 16.3 в атмосферу. Если самостоятельное дыхание ведется под постоянным положительным давлением, то нажатием кнопки «Установка величины потока G» воздействуют на ШД 3.2, и он открывает дроссель-регулятор вентиляции 3.3. В дыхательный контур поступает постоянный поток газа с генератора вдоха 2, камера управляющего клапана УДВ 3.12 через 3.13, 3.14. Фильтр 3.1 соединяется с линией нагнетания генератора вдоха 2, а через ЭР 3.11 с предохранительным клапаном 3.6 и регулятором давления 7.1, поворотом рукоятки регулятора 7.1 на его мембране формируется усилие, обеспечивающее большую или меньшую степень стравливания газа из камеры управления клапана УДВ 3.12 и соответственно уровень давления в ней. Это давление определяет уровень ПДКВ, который составляет при СДПД амплитуду колебаний давления. Средний уровень давления зависит от значения скорости потока 9. Предохранительный клапан 3.8 срабатывает в случае, если уровень давления в дыхательной контуре превышает 4 кПа (400 мм вод. ст). Таким образом, даже при установке (ошибочно) чрезмерных значений G, при которых уровень давления может стать опасным, обеспечивается безопасность пациента. По истечении заданного времени L, в течение которого пациент дышит самостоятельно, аппарат переключается, в положение ожидания попытки вдоха. При этом ЭМК 3.4 и 3.7 закрываются, ЭМК 3.10 остаются открытыми. ШД 3.2 переводит дроссель-регулятор 3.3 в положение, соответствующее установленной скорости вдувания Q. Переключение на выдох происходит либо по достижении заданного давления, либо по истечении 3 сек. При этом ЭНК 3.4 закрывается, ЭНК 3.10 открывается. Если в интервале L было установлено G=0, то ЭР 3.13 остается в положении УИВЛ. ЭР 3.11 закрывается, а ЭР 3.14 в конце вдоха соединяет камеру управления клапана УДВ 3.12 с линией нагнетания генератора вдоха 2, так что в цикле ВИВЛ сохраняется ПДКВ, заданное при самостоятельном дыхании. Если же в L интервале имело место G=0, то ЭР 3.11 остается закрытым, ЭР 3.14 перекрывает линию из генератора вдоха 3 и соединяет камеру управления клапана УДВ 3.12 через клапан 16.3 с атмосферой. Переключение на самостоятельное дыхание после цикла ВИВЛ происходит через 2 с после окончания вдоха. При этом ЭМК открываются, а ЭР переходит в положение, соответствующее выбранному уровню давления, как описано выше. В режиме СППВ возможно распыление аэрозоля лекарственных средств. При этом ЭР 3.22 соединяет распылитель с источником питания на все время самостоятельного дыхания и в фазе вдоха цикла ВИВЛ.
Работа аппарата в режиме СДПД
В режиме СДПД схема работает так же, как в фазе СДПД в режиме СППВ. Возможно одновременное проведение распыления лекарственных средств, которое производится в этом режиме непрерывно.
Работа аппарата в режиме САМД
При самостоятельном дыхании САДМ генератор вдоха 2 не работает, ЭМК 3.4, 3,7, 3.10 открыты. Па циент вдыхает свежую смесь из мешка 1.5 блока подачи кислорода 1 через самодействующие клапаны 3.17, 3.6 и ЭМК 3.7. Коммутация пациента с линиями вдоха и выдоха в соответствующих фазах дыхательного цикла происходит с помощью самодействующих клапанов 3.6 и 3.9.
При ИВЛ вручную (ВР) (мешком 17) клапан 3.17 обеспечивает заполнение мешка свежей смесью из блока подачи кислорода 1 при его расправлении и предотврашает обратный сброс смеси в блок подачи кислорода 1 при сжатии мешка. Клапан УДВ 3.12 управляется пневматически от мешка 17 и обеспечивает перекрытие линии выдоха при сжатии мешка 17, то есть во время вдоха, и сообщение легких пациента с атмосферой при расправлении мешка 17 во время выдоха. ЭР 3.13 сообщает камеру управление клапана УДВ 3.12 с мешком 17 через бактериальный фильтр 3.16, что предотвращает инфицирование ЭР 3.13.
Описание структурной схемы (рис. 1.2.3) системы управления
Все функции управления аппаратом осуществляет ОМК. Сопроцессор ОМК обеспечивает постоянное сканирование клавиатуры и через основной процессор производит настройку на режимы, задаваемые оператором. Типы режимов, задаваемые параметры и информация о давлении в дыхательном контуре отображаются на двух газоразрядных индикаторах также через сопроцессор ОМК. На один из индикаторов выводятся цифровые значения, задаваемые или вычисленные, на другой – в виде столбиков переменной длины выводится текущее давление в дыхательном контуре и его различные установки. Для быстрой визуализации изменяющегося давления основной процессор ОМК через БИС параллельного ввода / вывода с частотой порядка 100 Гц запускает АЦП, считывает и обрабатывает результаты замера и передает информацию сопроцессору. Через эту же БИС осуществляется управление ЭМК и ЩД 6 в блоке пациента. Системное время ОМК (порядка 10 м с) задается таймером через один из входов контролера прерываний. Другой вход внешнего прерывания используется для дистанционного управления ЭМК вдоха и выдоха вручную. Микроконтроллер (рис. 4) (ОМК) представляет собой плату, на которой размещены два микропроцессора: основной типа КР5800ВМ30Л и сопроцессор типа КР1816ВЕ35 и ряд других БИС. Основной процессор обеспечивает основные функции вычисления и управления, а сопроцессор – обслуживание дисплея и клавиатуры. Память основного процессора составляет 16 кбайт, а сопроцессора – 2 кбайта, основной процессор дополнен двумя БИС параллельного ввода / вывода (частично одно из них используется для связи двух процессоров), БИС последовательного интерфейса контроллера прерываний, двумя программируемыми таймерами, а также оперативной памятью 2 кбайта и схемами интерфейсов системной шины И 4.1. Сопроцессор дополнен экспандером параллельного интерфейса.
1.3 Медико-биологические аспекты
1.3.1 Влияние ИВЛ на некоторые функции организма
Искусственной вентиляцией легких называют обеспечение газообмена между окружающим воздухом (или специально подобранной смесью газов) и альвеолярным пространством легких искусственным способом.
Основным и, пожалуй, единственным методом ИВЛ в настоящее время является метод вдувания газа в дыхательные пути. При этом либо в последние вводится определенный объем газовой смеси, либо она вдувается в легкие в течение определенного времени с заданной скоростью, либо подается до тех пор, пока давление в системе больной – респиратор не повысится до определенного уровня. В любом случае ИВЛ заменяет (протезирует) естественный акт внешнего дыхания путем создания положительного давления в начале дыхательных путей.
В комплексе интенсивной терапии основными задачами ИВЛ являются обеспечение адекватного газообмена в легких и освобождение больного от работы дыхания. Ликвидируя гипоксемию, а иногда и гиперкапнию, искусственное дыхание предотвращает развитие в органах необратимых изменений. Вторая задача не менее важна, чем первая, хотя не всегда учитывается в клинической практике. При ряде патологических процессов, особенно при нарушении проходимости дыхательных путей, резко возрастает «энергетическая цена» дыхания. Здоровый организм расходует на работу дыхательных мышц 1 –3% потребляемого кислорода. Включение ряда компенсаторных механизмов может увеличивать этот расход до 35 –50% от Vо2 [Долина О.А., 1975; Bjork V. О. et al» 1964; Marini J.J. et al., 1985]. ИВЛ, снимая нагрузку с дыхательной мускулатуры, освобождает больного от непосильной для него в данный момент работы и способствует перераспределению кислорода в организме, улучшает оксигенацию жизненно важных органов [Неговский В.А., 1971].
Однако наряду с несомненным благоприятным влиянием на жизнедеятельность организма ИВЛ может оказать побочное отрицательное действие. Начиная с конца 40-х годов изучению этих вредных эффектов посвящаются многочисленные исследования. Все же многие вопросы остаются спорными и не до конца решенными.
1.3.2 Влияние ИВЛ на гемодинамику
Лучше всего изучены гемодинамические эффекты ИВЛ. Известно, что внутригрудная гемодинамика во многом зависит от дыхательного цикла. При спонтанном дыхании во время вдоха давление в плевральных полостях снижается до –10 см вод. ст. При этом происходит «присасывание» крови к правому предсердию из полых вен, а также снижается давление в легочных капиллярах, что облегчает приток крови в систему малого круга кровообращения (рис. 1.3.1, а). В норме кровоток в легком во время выдоха составляет 6%, а во время вдоха – 9% от объема циркулирующей крови [Watrous W.G. et al., 1950]. В результате во время вдоха увеличивается систолический выброс (ударный объем) сердца (УОС).
При ИВЛ во время вдувания газовой смеси в трахею внутрилегочное давление повышается до 15 –20 см вод. ст. (иногда выше), а внутриплевральное до 5 –10 см вод. ст. Это приводит к уменьшению притока крови к правому предсердию (рис. 1.3.1, б). Раздуваемые изнутри альвеолы передавливают легочные капилляры, повышается давление в артериях малого круга кровообращения и ухудшается приток крови к легким из правого желудочка. Вследствие этого во время искусственного вдоха снижается УОС [Дворецкий Д.П. и др., 1984, и др.].
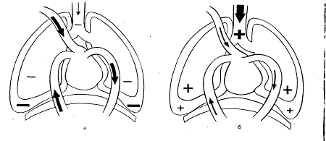
Рис. 1.3.1 Давление в дыхательных путях, альвеолах и плевральных полостях во время спонтанного (а) и искусственного (б) вдоха.
Компенсация снижения венозного притока к сердцу осуществляется за счет повышения периферического венозного давления, что приводит к уменьшению физиологического градиента давлений между артериолами и венулами [Astrup P ., Neykirch A ., 1959]. В результате в паренхиматозных органах может наступить уравновешивание этих давлений, ведущее к капиллягжому стазу и снижению продукции альбуминов в печени. Это в свою очередь вызывает падение онкотического давления плазмы, выход жидкости из капилляров в ткани, сгущение и увеличение вязкости крови, отечность тканей и азотемию.
Многими авторами показано, что отрицательное влияние ИВЛ на внутригрудную гемодинамику зависит от объема циркулирующей крови. При гиповолемии оно проявляется намного сильнее. Большое значение имеет также максимальное и среднее давление в трахее, создающееся при искусственном дыхании. С. A. Hubay (1955), J. С, Рагker и соавт. (1984) в эксперименте показали, что при максимальном давлении 50 см вод. ст. и среднем давлении 6,5 мм вод. ст. блокируется легочное кровообращение и резко повышается проницаемость капиллярной стенки.
Средним давлением называют отношение интегралов кривой давления вдоха и кривой давления выдоха в пределах дыхательного цикла. Среднее давление может быть определено и без графической регистрации – по показаниям сильно демпфированного манометра.
Общепринятым является мнение, что уменьшение вредного влияния ИВЛ на гемодинамику может быть достигнуто путем снижения среднего давления, для чего предложен ряд методов. В первую очередь это укорочение, фазы вдоха [Максимов Б.П., 1978; Berneus В., Carlston A., 1955, и др.]. Рекомендуется проводить ИВЛ при соотношении вдох: выдох не более 1: 1,5. Другим методом является активный выдох [Maloney J.V., Handford S.W., 1954, и др,]. Считается, что включение субатмосферного давления увеличивает венозный возврат к сердцу на 33% (а при сниженном объеме циркулирующей крови – на 100%), уменьшает отек мозга при его травмах и заболеваниях. По мнению ряда авторов, активный выдох особенно необходим у больных с гиповолемией и сердечной недостаточностью, у детей и при хронических заболеваниях легких, сопровождающихся снижением бронхиальной проходимости. В противовес этим представлениям многие исследователи показали, что отрицательное давление во время выдоха не улучшает гемодинамику и отрицательно сказывается на газообмене в легких и их механических свойствах.
С целью снижения среднего давления С.Т. Gray (I960) предложил проводить ИВЛ малыми дыхательными объемами, но с большей частотой (40–60 циклов в минуту). Этот метод нашел сторонников [Малышев В.Д., 1967, и др.], но в настоящее, время применяется крайне редко. В.С. Гигаури (1966) и Т.М. Дарбиняном (1966) предложен метод асинхронного дыхания, т.е. попеременного вдувания воздуха в левое и правое легкое для снижения среднего давления. Указанный метод не нашел распространения, хотя отечественной промышленностью некоторое время выпускался специально предназначенный для этой цели респиратор.
Остановимся на принципиальном отношении к вопросу о влиянии ИВЛ на гемодинамику. Хотя, как сказано выше, практически все авторы находили ту или иную, степень вредного воздействия искусственного дыхания на внутри грудное кровообращение, заметим, что подавляющее большинство исследовании сделано в эксперименте или во время общей анестезии у больных с нормальными легкими. С другой стороны, многолетний клинический опыт показывает, что на практике вредное влияние ИВЛ можно обнаружить и крайне редко. Более того, применение ИВЛ в режиме ПДКВ, при котором внутрилегочное давление повышается до значительного уровня, у большинства больных с острой дыхательной недостаточностью приводит не к снижению, а к увеличению сердечного выброса.
По нашим наблюдениям, даже очень высокое давление в трахее (60–70 см вод. ст.) во время искусственного вдоха у больных со сниженной бронхиальной проходимостью не оказывало сколько-нибудь заметного влияния на, гемодинамику [Кассиль В.Л., 1974, и др.]. Как было показано ранее [Кассиль В.Л., Рябова Н.М., 1977], при высоком сопротивлении дыхательных путей градиент давлений между трахеей и альвеолами (рис. 5) значительно увеличивается. Причина этого явления – увеличение постоянной времени (τ), которая равна произведению растяжимости легких на сопротивление дыхательных путей (С • R). Примерно 95% от давления, создаваемого в трахее, передается в альвеолы за время, равное Зτ [Nor-lander О. R., 1964, и др.]. При увеличении постоянной времени за счет возрастания R выравнивание давления между трахеей и альвеолами происходит гораздо медленней, чем у здорового человека.
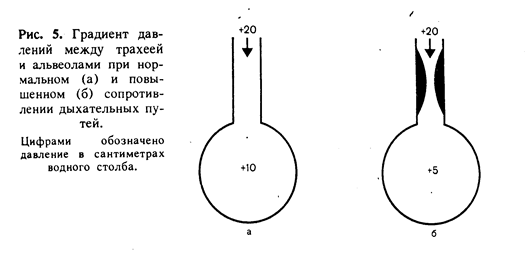
Пример. Если С = 0,25 л/см вод. ст., а R = 5 см вод. ст./ (л • с-1 ), то τ = 0,25 • 5 = 1,25 с. При частоте дыхания 18 в минуту и соотношении вдох: выдох 1:2 продолжительностью вдоха (Твд ) равна 1,1 с. Тогда в конце фазы вдоха давление в альвеолах:
Ра = (95%·Твд (с)) /Зτ (с) = (95·1,1) /3,75 = 27,9% от давления, созданного в конце вдоха в трахее.
Если же R возрастает вдвое, то постоянная времени соответственно увеличивается до 2,5 с. Тогда при тех же условиях:
Р А1 = (95·1,1) /7,5=13,9% от давления, созданного в трахее.
В этих условиях даже существенное повышение трахеального давления не сопровождается выраженным нарастанием давления в альвеолах. Этим можно объяснить крайне редкое проявление вредного влияния ИВЛ на кровообращение при острой дыхательной недостаточности, которая почти всегда сопровождается нарушением бронхиальной проходимости.
В связи с изложенным широко распространенное в литературе мнение относительно существенного вредного воздействия повышенного трахеального давления при ИВЛ на гемодинамику представляется нам обоснованным главным образом для анестезиологической практики, где у большинства больных нет выраженных острых изменений в легких. При интенсивной терапии тяжелобольных со значительными изменениями механических свойств легких эти опасения, на наш взгляд, во многом преувеличены. По нашему мнению, стремление к обязательному снижению среднего давления в течение дыхательного цикла, которое считается более физиологичным, далеко не всегда целесообразно. Исключение составляют больные с выраженной гиповолемией.
1.3.3 Влияние ИВЛ на функции легких
Многими авторами показано, что при ИВЛ появляется несоответствие между распределением воздуха и кровотока в легких [Зильбер А.П., 1971, 1978; Дворецкий Д.П., 1984; Rehder К. et al., 1972, и др.]. В результате этого увеличивается физиологическое мертвое пространство и шунтирование крови справа налево, повышается альвеолоартериальный градиент по кислороду. Нарушения вентиляционно-перфузионных отношений усиливаются с увеличением скорости газового потока (более 0,4 л/с) и частоты дыхания. Монотонный дыхательный объем способствует поступлению воздуха в одни и те же наиболее растяжимые участки легких. Возрастает опасность баротравмы альвеол. В менее растяжимых, участках отмечается склонность к ателектазированию.
По-видимому, ИВЛ значительно изменяет нормальное движение воздуха в легких. Согласно математической модели Шика–Сидоренко (рис. 1.3.3, а), при спокойном вдохе конвекционное движение воздуха по дыхательным путям замедляется по мере разветвления бронхиального дерева и на уровне кондуктивной зоны прекращается. В бронхиолах и альвеолах перемешивание воздуха осуществляется только за счет диффузии газов – броуновского движения молекул. В связи с большей скоростью газового потока при ИВЛ должны происходить смещение зоны конвекционного движения в сторону альвеол и уменьшение зоны диффузионного газообмена (рис. 1.3.3, б). Кроме того, при самостоятельном дыхании в большей степени вентилируются периферические участки легких, которые прилегают к движущейся диафрагме и грудной стенке. При ИВЛ, наоборот, наибольшая вентиляция происходит в перибронхиальных и медиастинальных участках, где в первую очередь создается положительное давление во время искусственного вдоха.
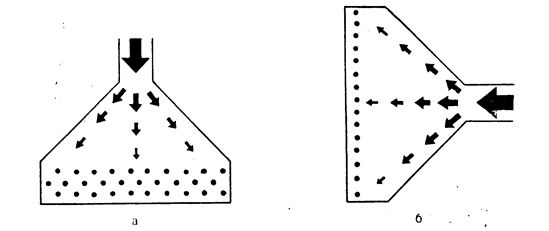
Рис. 1.3.3
С конца 40-х годов в литературе дискутируется вопрос: влияет ли на газообмен и гемодинамику форма кривых давления и газового потока? В 1947 г. A. Cournand и соавт. предложили свою «идеальную кривую давления», a J. Stoffregen (1956) – «улучшенную идеальную кривую
Для обеих характерно быстрое снижение давления в дыхательных путях после конца вдоха. А.С. Сметнев и В.М. Юревич (1984) также считают, что выдох должен начинаться немедленно после конца вдоха и положительное давление в легкие необходимо поддерживать только во время введения в легкие требуемого дыхательного объема. Считается, что это уменьшает вредное влияние ИВЛ на гемодинамику.
С. G. Engstrom и О.Р. Norlander (1962) теоретически обосновали другую форму кривой, на которой имеется плато – статическая фаза после окончания вдоха и перед началом выдоха. По их мнению, такая инспираторная пауза способствует наилучшему распределению воздуха внутри легких.
Ряд авторов считают, что вентиляционно-перфузионные отношения в легких улучшаются, если скорость газового потока нарастает к концу вдоха [Гейронимус Т.В., 1975; Максимов Б.П., 1978; Engstrom С. G., 1963; Johansson N., 1975, и др.]. С другой стороны имеются данные, говорящие в пользу постоянной [Гальперин Ю.С., 1972; Burchardi H., 1974] или даже снижающейся [Baker A.A. et al., 1977; Brychta О. et al., 1980; Danzmann E. et al., 1980; Al-Saady N., Bennett E ., 1985; Felton C.R. et al., 1984] скорости потока во время вдоха. Наконец, имеются серьезные сомнения в том, что форма кривых давления и скорости в дыхательных путях оказывает существенное влияние на газообмен в легких [Кассиль В.Л., 1981; Fuleihan S.F. et al., 1976, и др.].
Существуют также разногласия по вопросу о воздействии различных соотношений времени вдоха и выдоха на распределение воздуха в легких и отношение мертвого пространства к дыхательному объему.
Большинство исследователей считают, что ИВЛ значительно ухудшает механические свойства легких: их эластическое и аэродинамическое сопротивление вдоху возрастает. Увеличению последнего способствует турбулентность газового потока при ИВЛ. Что касается снижения растяжимости легких, то механизм его не совсем ясен, так как показано, что оно наступает буквально через несколько минут после начала ИВЛ [Mundeleer P., 1978].
Все же нам кажется, что влияние ИВЛ на газообмен и механику дыхания зависит прежде всего от исходного состояния легких и всего аппарата внешнего дыхания. Если вентиляционно-перфузионные отношения в легких до ИВЛ не были нарушены, то искусственное дыхание может существенно изменять их в отрицательную сторону. Но если ИВЛ начинают при острой дыхательной недостаточности, при которой обязательно нарушается отношение Уа /Qт , то результат скорее всего оказывается обратным. Увеличивая число вентилируемых альвеол, ИВЛ способствует уменьшению шунтирования крови в легких, снижая тем самым D (А-а) о2 . В том, что это происходит, сомнений нет, так как нередко ИВЛ начинают при D (А-а) о2 более 450 мм рт. ст. в условиях самостоятельного дыхания 100% кислородом (FI О2 =1,0). При этом PaО2 после начала ИВЛ, как правило, увеличивается, т.е. альвеолярно-артериальный градиент по кислороду значительно снижается. При этом сдвиг вентиляционно-перфузионных отношений в сторону увеличения Vа происходит не за счет дополнительных энергозатрат больного; наоборот, работа дыхания у него практически сводится к нулю.
То же можно сказать об увеличении отношения VD /Vт. В условиях самостоятельного дыхания увеличение физиологического мертвого пространства снижает эффективность вентиляции легких и требует от больного дополнительных затрат энергии на работу дыхания. При ИВЛ эту работу выполняет респиратор, а увеличивая дыхательный объем, легко можно уменьшить VD /VT до нормальной величины, т.е. обеспечить необходимый уровень альвеолярной вентиляции.
Более существенное значение, на наш взгляд, имеет неравномерность вентиляции в плане опасности баротравмы и ателектазирования отдельных участков легких. Этот неблагоприятный эффект ИВЛ должен быть по мере возможности устранен.
В последние годы большое внимание уделяется влиянию ИВЛ на недыхательные функции легких. Установлено, что искусственное дыхание неблагоприятно сказывается на дренажной функции трахеобронхиального дерева. В связи с выключением нормального кашлевого механизма после интубации трахеи или трахеостомии кашель либо отсутствует, либо становится неэффективным даже при хорошей функции экспираторных мышц и достаточном резервном объеме вдоха. Поступление в дыхательные, пути недостаточно согретого и увлажненного воздуха, повышенное содержание кислорода в газовой смеси нарушают работу ресничек бронхиального эпителия и местный иммунитет дыхательной системы [Можаев Г.А., Носов В.В., 1985; Bilnenstock J., 1980, и др.]. Задержка, бронхиального секрета, изменение его реологических свойств вызывают резкое падение коллатеральной вентиляции – закрываются поры Кона. Вследствие лимфостаза происходит сужение мелких бронхов и бронхиол. Указанные изменения приводят к нарушению механических свойств легких, в первую очередь – к повышению сопротивления дыхательных путей. Обеспечение полноценного дренирования трахеобронхиального дерева – одна из первоочередных задач при проведении длительной ИВЛ.
Большое значение имеет влияние ИВЛ на распределение воды в легких. Необходимо напомнить некоторые сведения из физиологии.
Согласно современным представлениям, перемещение воды из внутрисосудистого в интерстициальное пространство и обратно зависит от перепада между гидродинамическим давлением внутри капилляра и гидростатическим вне его, а также от градиента коллоидно-осмотических давлений между плазмой и интерстициальной жидкостью. По закону Старлинга поток жидкости (Q) выражается следующим уравнением:
Q = Кф [(Рвс – Рпв ) –σ (Пвс -Ппв )],
где Кф – коэффициент фильтрации; σ – коэффициент отражения для белков; Рвс – внутрисосудистое гидродинамическое давление; Рпв – периваскулярное гидростатическое давление; Пвс – коллоидно-осмотическое давление плазмы (внутрисосудистое); Ппв – коллоидно-осмотическое давление интерстициальной жидкости (периваскулярное).
В легких Рпв соответствует альвеолярному давлению (РА ) и, так же как Рвс , меняется в течение дыхательного цикла.
В артериальной части капилляра, где гидродинамическое давление преобладает над периваскулярным гидростатическим и коллоидно-осмотическим, жидкость фильтруется в интерстиций (рис. 1.3.4). В венозной части, где периваскулярное коллоидно-осмотическое давление выше гидродинамического, происходит резорбция жидкости. Та часть жидкости, которая не подверглась резорбции, удаляется с лимфой.
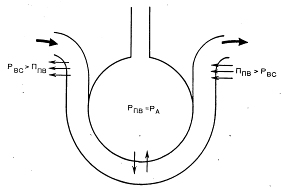
Рис. 1.3.4
Однако взаимоотношения между РА , давлением в артериальном (Ра ) и венозном (Pv ) участках капилляра зависят от положения различных участков легкого по, отношению к сердцу. Согласно J. В. West (1974) и G.Y. Gibson (1984), при вертикальном положении тела в легких можно различать четыре зоны, определяемые гравитационным фактором (рис. 1.3.5).
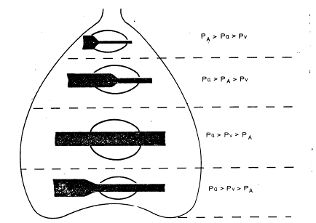
В верхней зоне (верхушки легких) среднее альвеолярное давление во время дыхательного цикла преобладает над артериальным, которое в свою очередь выше венозного:
РА > Ра > Pv .
Здесь в норме легочный кровоток осуществляется только во время вдоха, когда РА становится ниже атмосферного.
В средней зоне артериальное давление становится выше альвеолярного, но последнее преобладает над венозным или равно ему:
Pa > РА > Pv .
Здесь легочный кровоток осуществляется не за счет разницы (Ра – Pv ), а благодаря градиенту (Ра – Рд).
В третьей зоне среднее альвеолярное давление в течение дыхательного цикла ниже артериального и венозного:
Ра > Pv > РА .
Именно здесь легочное кровообращение осуществляется с наибольшей интенсивностью.
Наконец, в четвертой зоне (базальные отделы легких) существуют те же отношения:
Ра > Pv >РА ,
но перфузия снова снижается из-за местного увеличения интерстициального давления на прекапиллярные сосуды.
Следовательно, в нижних зонах легких Рвс всегда выше Рпв (поскольку Рпв = РА ) и фильтрация жидкости происходит наиболее интенсивно. Нижние отделы легких, составляющие всего 25 –30% их общей массы, продуцируют около 50% лимфы, оттекающей по правому лимфатическому протоку [Dembling R.N., 1975].
ИВЛ, существенно изменяя регионарные взаимоотношения между альвеолярным, артериальным и венозным давлением [Зильбер А.П., 1978] (рис. 1.3.6), в значительной степени нарушает процесс обмена воды в легких. А.В. Бобриков и соавт. (1981) показали в эксперименте, что постоянное повышение внутрилегочного давления уже через 3 ч вызывает накопление жидкости в легких. При ИВЛ лимфоток из легких снижается [Caldini P., Leitz DJ., 1975; Schad H. et al., 1978, и др.].
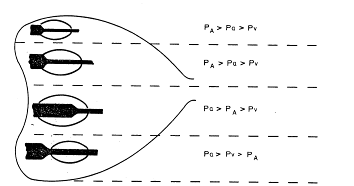
Рис. 1.3.6
Повышенное внутригрудное давление сдавливает правый лимфатический проток, затрудняя отток лимфы из легких. Кроме того, при высоком альвеолярном давлении во время искусственного выдоха может наступить сдавление легочных капилляров. Это значительно усиливает процесс фильтрации воды из артериальной части капилляра в интерстиций, особенно из экстраальвеолярных сосудов, где давление выше, чем в легочных капиллярах. Указанные процессы могут привести к образованию периваскулярных скоплений жидкости в виде муфт, окружающих капилляры. Задержка воды в легких особенно выражена при увеличении РАсо . Гипокапния несколько уменьшает опасность развития интерстициального отека [Schad H. et al., 1978, и др.]. Наконец, в условиях длительной ИВЛ может возникать гипопротеинемия из-за недостаточного снабжения организма энергией и пластическим материалом (азот). Это приводит к снижению коллоидно-осмотического давления плазмы, в результате чего могут развиваться отеки как в ткани легких, так и на периферии.
Приведенные выше данные показывают значение своевременного устранения метаболических нарушений у тяжелобольного в процессе ИВЛ. Сегодня чаще всего бывает трудно диагностировать и устранить задержку воды в легких, но несомненно, что работа в этом направлении должна быть продолжена.
Неблагоприятное влияние длительной ИВЛ на легочное кровообращение и метаболизм может привести к снижению активности и продукции сурфактанта, чему способствуют еще два фактора: высокое FiО2 , и увеличение продукции антиальвеол при их растяжении большими дыхательными объемами. При повышении поверхностного натяжения в альвеолах возрастает эластическое сопротивление дыханию [Зильбер А.П., 1978, и др.].
Однако нельзя согласиться с тем, что длительная ИВЛ всегда вызывает снижение растяжимости легких. Как было показано ранее [Кассиль В.Л., 1974], этот процесс зависит не столько от самой ИВЛ, сколько от состояния легких в процессе искусственного дыхания. При развитии бронхолегочных осложнений (трахеобронхит; пневмония, ателектазы и др.) растяжимость легких прогрессивно снижается. По мере улучшения состояния больного растяжимость, как правило, постепенно увеличивается, становясь выше, чем до начала ИВЛ [Кассиль В.Л., Рябова Н.М., 1977].
1.3.4 Влияние на некоторые другие функции организма
В литературе описаны и другие неблагоприятные эффекты ИВЛ, в частности увеличение продукции антидиуретического гормона гипофизом, что приводит к повышению реабсорбции воды в канальцах почек и олигурии. Однако на практике мы никогда не наблюдали существенного отрицательного влияния ИВЛ на функцию почек. Наоборот, у больных с начинающейся почечной недостаточностью в результате длительной гипоксии, например при массивной кровопотере, экламптической коме, на фоне ИВЛ часто развивалась полиурия как фаза выхода из состояния почечной недостаточности. Факторами, способствующими восстановлению функции почек, являются устранение гипоксии, повышенного содержания катехол-аминов в крови и спазма артериол. Если у тяжелобольного возникла олигурия, то, как правило, это было вызвано какой-то другой причиной (интоксикация при перитоните, длительная гипотензия при травматическом шоке и т.д.).
Считается, что гипервентиляционный режим ИВЛ нарушает микроциркуляцию, вызывает сдвиг кривой диссоциации оксигемоглобина влево, что приводит к гипоксии тканей. Но это предположение также противоречит клинической практике. Применение ИВЛ у больных с острой дыхательной недостаточностью в значительной степени улучшает функцию паренхиматозных органов.
Проведение длительной ИВЛ может сопровождаться развитием ряда осложнений. Однако эти осложнения гораздо чаще возникают у больных, которым искусственное дыхание начинают слишком поздно, когда длительная гипоксия вызвала тяжелые, подчас неустранимые изменения в органах и тканях, а также при неправильном выборе параметров ИВЛ и плохом уходе за больным. Кроме того, ИВЛ является очень важным, но далеко не единственным методом лечения в системе интенсивной терапии. Нередко осложнения могут развиться из-за недостаточного питания больного, неправильного подбора антибактериальной терапии, несвоевременного устранения волемических и метаболических нарушений.
В табл. 1.3.1 представлены сводные данные о влиянии ИВЛ на некоторые функции организма в зависимости от условий, в которых она применяется.
| Функция организма |
При кратковремен – ной ИВЛ и здоровых легких в условиях наркоза |
При длительной ИВЛ в условиях острой дыхательной недостаточности |
| Сердечный выброс |
Может уменьшать- ся, особенно при гиповолемии |
Не изменяется или увеличивается |
| Равномерность вентиляции легких |
Ухудшается |
Улучшается |
| Внутри легочный шнур справа на лево |
Увеличивается |
Уменьшается |
| D (А-а)О2 |
Увеличивается |
Уменьшается |
| VD / VТ |
Увеличивается, но это не имеет большого значения |
|
| Механические свойства легких |
Ухудшаются |
Могут улучшаться по мере ликвидации патологических процессов в легких |
| Дренажная функция дыхательных путей |
Существенно не нарушается |
Нарушается |
| Распределение воды в легких |
Не нарушается (не успевает) |
Нарушается |
| Периферическая микро циркуляция |
Может ухудшаться |
Улучшается |
ИВЛ не является полноценной заменой нормального самостоятельного дыхания. С точки зрения физиологии последнее всегда лучше. Однако возникает вопрос: нормальное или нарушенное самостоятельное дыхание? Если оно нормальное и не требует от больного чрезмерных энергозатрат, тогда это положение вполне справедливо. Другое дело, когда собственное дыхание больного нарушено, когда оно не способно обеспечить организм необходимым ему в данный момент количеством кислорода, поддержать Расо2 , на оптимальном в данный момент уровне, осуществляется с большим расходом энергии. При таких обстоятельствах ИВЛ становится абсолютно необходимой и польза от нее значительно превышает вредные эффекты.
Общепринято мнение, что следует выбирать наиболее «физиологичные» параметры искусственного дыхания, т.е. наиболее приближающиеся к параметрам спонтанного дыхания у здорового человека. Последняя рекомендация, может быть и справедливая для условий анестезии, когда ИВЛ чаще всего проводят человеку без дыхательных нарушений, на наш взгляд, не подходит к условиям интенсивной терапии. Мы уже упоминали, что большая часть данных о вредных эффектах ИВЛ получена в эксперименте или в наблюдениях за людьми со здоровыми легкими. Однако то, что плохо для здорового организма, может оказаться весьма полезным для больного. Как показано ниже, некоторые неблагоприятные эффекты ИВЛ, например повышенное внутри легочное давление, с успехом используются в лечебных целях. Некоторые «антифизиологичные» режимы ИВЛ оказывают благоприятное воздействие на гемодинамику и вентиляционно-перфузорные отношения в легких, если в результате тяжелого заболевания или травмы эти процессы оказались грубо нарушенными. На наш взгляд, следует стремиться не к «физиологичности» ИВЛ, ориентируясь при этом на нормальные константы здорового человека, а к соответствию параметров искусственного дыхания потребностям больного в каждый момент.
Однако в намерения автора вовсе не входит убеждать читателя, что неблагоприятными эффектами ИВЛ можно пренебрегать. Наоборот, как показано выше, надо не только помнить о них, но и применять ряд профилактических мероприятий, способствующих устранению их опасных последствий. Четкое представление о патофизиологии ИВЛ наряду со строгим учетом клинических данных позволяет значительно повысить эффективность искусственного дыхания и избежать тяжелых осложнений.
1.3.5 Общие показания к ИВЛ
Несмотря на многочисленные работы, посвященные показаниям к ИВЛ при интенсивной терапии и многолетнее изучение вопроса, его нельзя признать окончательно решенным. Этот вопрос первостепенной важности, так как от своевременности начала во многом зависит эффективность искусственного дыхания. Одна из самых частых ошибок при лечении больных с острой дыхательной недостаточностью – позднее начало ИВЛ.
Ретроспективный анализ показывает, что среди наиболее тяжелого контингента больных с острой дыхательной недостаточностью (массивная кровопотеря, разлитой перитонит, послеродовая эклампсическая кома, критическая черепно-мозговая травма, тяжелая множественная травма, множественный перелом ребер, механическая асфиксия), которым потребовалось длительное проведение ИВЛ, летальность составляла в среднем 55,2%. Но если ИВЛ начинали в пределах первых 3 ч от момента появления дыхательной недостаточности, то летальность равнялась 37,1%, в промежутке от 3 до б ч – 52,5%, позже 6 ч – 80,6% [Кассиль В.Л., 1981]. Однако общеизвестно, что далеко не каждый больной с признаками дыхательной недостаточности нуждается в ИВЛ. Установление точных критериев, позволяющих начать искусственное дыхание своевременно, когда оно становится действительно необходимым, имеет большое практическое значение. Это позволит избежать фатальной потери времени, когда все лечебные мероприятия делаются малоэффективными или бесполезными из-за развития необратимых процессов в органах и тканях вследствие длительной гипоксии.
Показания к ИВЛ следует устанавливать с учетом характера основного патологического процесса, вызвавшего дыхательную недостаточность, патогенеза последней и индивидуальных особенностей больного. Больные различного возраста, с разными заболеваниями и травмами неодинаково переносят гипоксию (и гиперкапнию), по-разному реагируют на нее и имеют неодинаковые компенсаторные возможности. Так, сопротивление дыхательных путей может быть значительно увеличено у больных с хроническими обструктивными заболеваниями легких, но им далеко не всегда показана ИВЛ. У ряда больных с преобладанием рестриктивных процессов и хронически сниженной растяжимостью легких, уменьшенной альвеолярном вентиляцией, постоянно сохраняется гиперкапния. Это само по себе тоже не свидетельствует о необходимости применять ИВЛ во всех случаях. Следовательно, существуют частные показания к искусственному дыханию.
Здесь мы остановимся на общих показаниях к ИВЛ, которые можно условно разделить на две группы: чисто клинические и выявляемые инструментальными методами исследования.
1.3.6 Клинические показания к ИВЛ
В экстренных ситуациях, когда тяжесть состояния больного или отсутствие необходимого оснащения делают невозможным его детальное обследование, показаниями к ИВЛ являются:
1) отсутствие самостоятельного дыхания (апноэ);
2) остро развившиеся нарушения ритма дыхания, патологические ритмы, дыхание агонального типа;
3) учащение дыхания более 40 в минуту, если это не связано с гипертермией (температура тела выше 38,5 °С) или выраженной не устраненной гиповолемией;
4) клинические проявления нарастающей гипоксемии и (или) гиперкапнии, если они не исчезают после проведения консервативных мероприятий: обезболивания, восстановления проходимости дыхательных путей, кислородной терапии, ликвидации опасного для жизни уровня гиповолемии и грубых нарушений метаболизма.
Первые два пункта представляют собой абсолютные показания к ИВЛ (естественно, речь не идет о больных с инкурабельными злокачественными процессами). Остро возникшие нарушения ритма дыхания – свидетельство глубоких нарушений центральной регуляции дыхания. Исключение составляют больные с диффузным атеросклеротическим поражением головного мозга и сердечной недостаточностью. У них нередко возникает дыхание типа Чейна – Стокса, которые удается ликвидировать фармакологическими препаратами.
Учащение дыхания – показание относительное. Цифра 40 является условной, но все же ее можно считать рубежом, после которого может легко наступить декомпенсация самостоятельного дыхания. Тахипноэ приводит к нарушению распределения воздуха в легких и значительному возрастанию отношения VD /VТ , требует большого расхода энергии, истощает силы больного. Если после снижения температуры тела, восстановления объема Циркулирующей крови, устранения грубых нарушений метаболизма тахипноэ сохраняется, а тем более имеет место тенденция к его нарастанию, то необходима ИВЛ, тем более что произвести коррекцию метаболических нарушений в условиях сохраняющейся или углубляющейся гипоксии чаще всего не удается.
Наконец, клинические признаки нарастающей дыхательной недостаточности мы считаем одним из наиболее важных критериев. Динамическое наблюдение позволяет выявить и оценить степень выраженности основных симптомов. Особое значение мы придаем нарушениям психики и сознания, которые свидетельствуют о гипоксической энцефалопатии.
В некоторых наблюдениях эти симптомы могут регрессировать после проведения полноценного обезболивания, восстановления проходимости дыхательных путей, ингаляций кислорода. Но если клиника гипоксии быстро нарастает, то ждать эффекта от консервативных мероприятий не следует, показана ИВЛ.
1.3.7 Показания к ИВЛ на основании данных инструментального исследования
Некоторые авторы считают основным для установления показаний к ИВЛ изучение КОС и газов крови. При этом приводятся величины параметров в весьма широком диапазоне. Так, считается необходимым начинать ИВЛ, если РаО2 , снижается до 70–60 мм рт. ст., а РаО2 повышается до 55 –80 мм рт. ст. [Гологорский В.А., 1972; Гейро-нимус Т.В., 1975; Зильбер А.П., 1978; Глумчер Ф. С» 1985; Norlander О., 1968, и др.]. Расхождение в цифрах объясняется разным контингентом больных, находившихся под наблюдением различных исследователей, и неодинаковыми условиями обследования (в первую очередь – при каком FiО2 , определяли РаО2 ). Отметим также, что гиперкапния при острой дыхательной недостаточности развивается достаточно редко, в основном при выраженной обструкции дыхательных путей, сдавлении легкого, нарушениях функций дыхательных мышц. Кроме того, присоединение к гипоксии гиперкапнии свидетельствует о далеко зашедшей дыхательной недостаточности.
По нашему мнению, однократное исследование газов крови вообще мало информативно, если результаты его не сопоставляются с клиническими данными. Кроме того, выраженное снижение Рао, особенно в условиях оксигенотерапии, – поздний признак, свидетельствующий о наступившей декомпенсации. Мы полностью согласны с Н.М. Рябовой (1974), что начинать ИВЛ надо в стадии максимального напряжения компенсаторных механизмов, когда Рао, остается на достаточно высоком уровне и отмечается нарастающая гипокапния или нормокапния на фоне резкого увеличения МОД. Мы не можем согласиться с мнением А.С. Сметнева и В.М. Юревича (1984), что главным (если не единственным) показанием к ИВЛ является «абсолютная» гиповентиляция с повышением РаСО2 .
Ряд исследователей справедливо полагает, что показания к ИВЛ должны быть основаны в первую очередь на изучении функционального состояния аппарата внешнего дыхания и его резервных возможностей. Большое значение имеет также энергетическая цена дыхания, т.е. то, какую работу затрачивает организм больного для обеспечения адекватной альвеолярной вентиляции. Считается, что работа дыхания более 1,8 кгм/мин [Peters R. М. et al., 1972] или 3 кгм/мин [Зильбер А.П., 1984] быстро приводит к декомпенсации вентиляторного аппарата. Как видит читатель, здесь также имеется значительное расхождение в цифрах. Кроме того, определение величины работы дыхания является сложной и не всегда доступной задачей. Более просто определить максимальное разрежение, которое способен создать больной при попытке вдоха из замкнутой маски. Если разрежение меньше –25 см вод. ст., то показана ИВЛ. [Гёйронимус Т.В., 1975].
При исследовании функции и механики дыхания информативными тестами являются ЖЕЛ (менее 10 – 15 см3 / кг) и объем форсированного выдоха (менее 10 см3 /кг). ИВЛ считается также показанной при снижении растяжимости легких ниже 0,06 л/см вод. ст., сопротивлении дыхательных путей выше 13 –14 см вод. ст./ / (л* с-1 ) и отношении VD /VТ более 0,6.
Исключительно большое значение придают альвеолярно-артериальному градиенту по кислороду в условиях дыхания 100% кислородом. Увеличение D (А – а)О2 , более чем до 350 –450 мм рт. ст. (снова расхождение в цифрах!) является показанием к ИВЛ.
Необходимо еще раз подчеркнуть, что, на наш взгляд, первостепенное значение имеют клинические данные. Если состояние больного позволяет выжидать, а не требует экстренных мероприятий, то ориентироваться следует не столько на абсолютные величины результатов инструментального обследования больного, сколько на их динамику, сопоставляя ее с развитием клиники. Ниже мы приводим общие показания к ИВЛ на основании различных источников и результатов собственных наблюдений.
| Характер дыхания |
Апноэ, нарушения ритма дыхания |
| Частота дыхания |
Более 40 в минуту |
| Другие клинические признаки |
Спутанность сознания, повышенная влажность кожных покровов, цианоз, стойкая тахикардия |
| МОД |
Прогрессирующее увеличение |
| ЖЕЛ |
Прогрессирующее снижение до 12см3 /кг |
| Объем форсированного выдоха |
Ниже 10 см3 /кг |
| Разрешение при вдохе из замкнутой маски |
Менее – 25 см вод. ст. |
| Растяжимость легких |
Менее 0,06 л/см вод. ст. |
| Сопротивление дыхательных путей |
Более 13 см вод. ст./(л*с-1 ) |
| VD /VТ |
Более 0,6 |
| РаО2 |
Прогрессирующее снижение ниже 70 мм рт. ст., если это сочетается с клиническим проявлением гипоксии |
| РаСО2 |
Прогрессирующее снижение ниже 25 мм рт. ст. |
| D (A – а) О2 |
Более 400 мм рт. ст. |
Показания к ИВЛ могут возникнуть как при постепенном нарастании, так и при быстром развитии дыхательной недостаточности. В первом случае вопрос о применении респиратора решается на основании совокупности данных, в том числе ряде объективных тестов. Последние играют очень важную роль и позволяют судить, продолжать ли консервативную терапию, или начинать ИВЛ. Однако переоценивать их значение не следует.
Мы не можем согласиться с категорическим утверждением Т.С. Гейронимуса (1975), что, не зная газов крови, ни начинать, ни проводить ИВЛ невозможно. Ситуации, в которых приходится лечить больного с острой дыхательной недостаточностью, весьма различны. Очень многое зависит от опыта и знаний врача, его умения правильно оценивать состояние больного, вовремя распознать и интерпретировать клинические симптомы. Но даже если врач и считает, что ИВЛ показана, он должен реально оценить возможность обеспечить наблюдение и уход за больным. После интубации трахеи или трахеостомии судьба больного во многом зависит от квалификации и добросовестности всего персонала. Если он не имеет достаточного опыта, а показания к ИВЛ относительны, то лучше усилить консервативную терапию. Если же ИВЛ безусловно необходима, следует подумать, не целесообразнее ли перевести больного в другое лечебное учреждение.
Необходимо сделать одно замечание. Нам не раз приходилось присутствовать при весьма эмоциональных спорах (и принимать участие в них) о том, надо ли начинать ИВЛ? Обычно эти дискуссии возникают между реанима-тологами и врачами других специальностей (хирурги, терапевты, инфекционисты и др.), но нередко и среди специалистов в области интенсивной терапии. Считаем, что последнее слово всегда должно оставаться за реаниматологом, если он обладает достаточной квалификацией и способен взять на себя ответственность за принятие решения. Какими бы высокими званиями ни обладали представители других специальностей и администрации лечебных учреждений, они не должны считать себя компетентными в таком сложном вопросе, как проведение ИВЛ.
1.4 Вывод уравнения движения следящей системы
В данном разделе проводится вывод уравнения движения электропривода асинхронного электродвигателя, находящегося в генераторе вдоха. Для более точной работы двигателя, на его выходном валу был установлен тахогенератор, в результате чего получилась следящая система.
Дифференциальное уравнение системы может быть найдено из уравнений ее элементов путем их совместного решения.
Прежде всего запишем уравнения отдельных элементов системы. Для элемента сравнения справедливо соотношение
q = a вх – a вых , (1.4.1)
где q – рассогласование, снимаемое с элемента сравнения;
a вх и a вых – соответственно углы поворота входного и выходного валов системы.
Для преобразователя запишем уравнение
U q = kn q , (1.4.2)
где U q – измеритель рассогласования (потенциометры);
kn – коэффициент пропорциональности, характеризующий крутизну характеристики U q = f ( q ) преобразователя.
Коэффициент пропорциональности можно выразить как kn =Uq /q и измерять в вольтах на градус. Таким образом, этот коэффициент показывает, какое напряжение сигнала ошибки приходится на единицу угла рассогласования.
Для тахогенератора
Um
=
km![]() ;
(1.4.3)
;
(1.4.3)
Для усилителя
Ua = ky U вх , (1.4.4)
где U а – выходное напряжение усилителя, поступающее в цепь якоря исполнительного двигателя;
ky – коэффициент усиления усилителя по напряжению;
U вх = U q – Um ; (1.4.5)
Для того чтобы вывести дифференциальное уравнение двигателя, рассмотрим протекающие в нем процессы, принимая следующие допущения:
- внутреннее сопротивление выходного каскада усилителя равно нулю;
- коэффициент самоиндукции цепи равен нулю;
- Реакция якоря отсутствует.
Уравнение равновесия э.д.с. для цепи якоря двигателя имеет следующий вид:
Ua = Ia Ra + Ea , (1.4.6)
где Ua – приложенное к цепи якоря напряжение;
Ia – ток якоря;
Ra – сопротивление якоря;
Ea – противо-э.д.с., возникающая в обмотке якоря при вращении.
На основании закона Фарадея получим
Ea = ke Ф W , (1.4.7)
где ke – коэффициент пропорциональности, характеризующий конструкцию электродвигателя;
Ф – поток возбуждения;
W – скорость вращения ротора.
Подставив (2.4.7) в (2.4.6), получим
Ua = Ia Ra + ke Ф W , (1.4.8)
Запишем уравнение равновесия моментов электродвигателя
Мвр =Мст +Мдин , (1.49)
Электромагнитный вращающий момент двигателя Мвр может быть выражен как
Мвр = k м Ф Ia , (1.4.10)
где k м – коэффициент пропорциональности, характеризующий магнитную проводимость магнитопровода электродвигателя.
Статический момент Мст , действующий на валу двигателя, можно представить как
Мст =Мхх +Мн , (1.4.11)
где Мхх – момент холостого хода;
Мн – момент создаваемый нагрузкой.
Динамический момент на валу двигателя Мдин имеет место при изменении скорости вращения и может быть выражен как
Мдин
=
J![]() ,
(1.4.12)
,
(1.4.12)
где J – момент инерции вращающихся частей;
![]() – ускорение вращения.
– ускорение вращения.
Решим уравнение (2.4.8) относительно тока якоря Ia :
Ia
=
 ,
(1.4.13)
,
(1.4.13)
Подставив (2.4.13) в (2.4.10) получим:
Мвр
=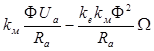 ,
(1.4.14)
,
(1.4.14)
Полученное уравнение (2.4.14) называется уравнением механической характеристики электродвигателя, которая представляет собой зависимость W = f (М) между моментом на валу двигателя и скоростью его вращения.
Для построения механической характеристики найдем точки ее пересечения с осями координат. Если по оси абсцисс откладывать момент Мвр , а по оси ординат – скорость вращения W , то, учитывая, что уравнение (2.4.14) относительно интересующих нас значений Мвр и W является уравнением первой степени, можно представить механическую характеристику двигателя в виде прямой, пересекающей оси координат в двух точках.
Для нахождения точки пересечения характеристики с осью абсцисс положим
W =0 . С учетом этого условия из уравнения (2.4.14) получим
Мвр
=М
n
=
![]() ,
(1.4.15)
,
(1.4.15)
где М n – пусковой момент двигателя, т.е. момент вращения, развиваемый двигателем при пуске, когда W =0.
Для определения точки пересечения характеристики с осью ординат положим Мвр =0 и подставив это условие в уравнение (2.4.14), получим
0=
 -
-  (1.4.16)
(1.4.16)
где W хх – скорость холостого хода двигателя (при отсутствии нагрузки на его валу).
Решим уравнение (2.4.16) относительно скорости. Получим
 . (1.4.17)
. (1.4.17)
Построим по полученным точкам механическую характеристику двигателя.
Из приведенного графика, а также уравнений (2.4.14) и (2.4.15) вытекает следующее соотношение:
Мвр =М n - F W , (1.4.18)
где F
=
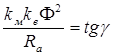 называется коэффициентом вязкого трения двигателя и характеризует жесткость его механической характеристики.
называется коэффициентом вязкого трения двигателя и характеризует жесткость его механической характеристики.
Из выражения (2.4.15) можно получить следующее соотношение
![]() ,
(1.4.19)
,
(1.4.19)
где  – коэффициент пропорциональности между пусковым моментом двигателя и приложенным к его якорю напряжением.
– коэффициент пропорциональности между пусковым моментом двигателя и приложенным к его якорю напряжением.
Из уравнений (2.4.4), (2.4.3) и (2.4.5) выразим входное напряжение усилителя следующим образом:
U
вх
=
kn
q
-
km![]() ,
(1.4.20)
,
(1.4.20)
тогда выходное напряжение усилителя
Ua
=
kn
ky
q
-
km
ky
![]() ,
(1.4.21)
,
(1.4.21)
при этом пусковой момент двигателя
М
n
=
kn
ky
kdU
q
–
km
ky
kdU![]() ,
(1.4.22)
,
(1.4.22)
где К0 = kn ky kdU – передаточный коэффициент системы;
F 1 = km ky kdU – коэффициент успокоения, вносимого тахогенератором.
Получим
М
n
=
K
0
q
–
F
1
 .
(1.4.23)
.
(1.4.23)
Подставив (2.4.24) в (2.4.18), получим
Мвр
=К0
q
–
F
1
 -
F
-
F
или
Мвр
=К0
q
– (
F
+
F
1
)
 .
(1.4.24)
.
(1.4.24)
Уравнение равновесия моментов двигателя запишется в следующем виде:
К0
q – (F+F1
) =
=  +Мст
(1.4.25)
+Мст
(1.4.25)
Производя замену aвых =aвх – q, получим

Это выражение представляет собой дифференциальное уравнение движения следящей системы с принимающим тахогенератором.
Важнейшим показателем, характеризующими поведение система, является ошибка слежения q. Получим выражения для статической и динамической установившихся ошибок.
Так как статическая ошибка qст
оценивается по окончании движения, т.е. при неподвижных входном и выходном валах, примем ![]() . Из этого следует, что
. Из этого следует, что ![]() . А так как в состоянии покоя системы ее ошибка должна быть постоянна, то
. А так как в состоянии покоя системы ее ошибка должна быть постоянна, то![]() и
и ![]() .
.
Отсюда получим
К0 q ст =Мст (1.4.26)
откуда
q
ст
=![]() .
(1.4.27)
.
(1.4.27)
Полагая, что входной и выходной валы движутся с одинаковой постоянной скоростью W
=
W
уст
=
const
, примем  . А так как в установившемся режиме ошибка слежения постоянна, то
. А так как в установившемся режиме ошибка слежения постоянна, то ![]() и
и ![]() . Отсюда получим
. Отсюда получим
К0 q =( F + F 1 ) W уст +Мст , (1.4.28)
но q = q ст + q dy . (1.4.29)
Следовательно,
К0 ( q ст + q dy )=( F + F 1 ) W уст +Мст, (1.4.30)
отсюда
q
ст
+
q
dy
= (1.4.31)
(1.4.31)
или, учитывая формулу (2.4.27),
q
dy
= (1.4.32)
(1.4.32)
2. Расчетно-конструкторская часть
2.1 Расчет и выбор элементов электрической схемы
Аппараты искусственной вентиляции легких по классификации медицинских аппаратов ГОСТ Р50444 – 92 относятся к изделиям класса А, вероятность безотказной работы которых задается равной 0,99 в течение заданной наработки.
Целью данного расчета является анализ данных по надежности микроконтроллера, входящего в состав блока управления аппаратом искусственной вентиляции легких «Спирон – 201», а так же подбор надежных элементов для управления аппаратом.
Значения интенсивностей отказов, режимы работы и поправочные коэффициенты по справочникам [2,3,4] элементов схемы КФБН.941200.731 Э3 приведены в таблице 2.1.1.
Так как было применено дублирование соединителей и дорожек монтажных их вероятность безотказной работы рассчитывается по формулам:
P с ( t ) = 1 – (1 – e - λ с t )2 (2.1.1)
![]() P
Д
(
t
) =1 – (1 –
e
-
λ
Д
t
)2
(2.1.2)
P
Д
(
t
) =1 – (1 –
e
-
λ
Д
t
)2
(2.1.2)
Вероятность безотказной работы остальных элементов микроконтроллера определяется уточненным средне – групповым методом по формуле:
![]() , (2.1.3)
, (2.1.3)
где li - интенсивность отказов элемента.
Вероятность безотказной работы всего микроконтроллера будет рассчитываться по формуле (2.1.4).
Pобщ (t) = Pc (t)· Pд (t)·P(t) (2.1.4)
1. Рассчитаем вероятность безотказной работы в течение заданной наработки.
| Коэф-т нагрузки Кн |
Температура рабочая Т,о С |
|||||||
| Микросхемы: КР580ВВ55А КР580ВИ53 К555ЛА3 К580ГО324 К555ИД7 К580ВМ80А КР580ВВ51А КР580ВИ53 КР580ВМ52 К580ВК28 К170АР2 К170УР2 К555АР3 К555ИД7 К555ЛЕ1 КР537РУ8А К555ИР22 КР580В555А КР580ВА87 К1816ВЕ35 К580ВР43 |
D1 D2 D3 D4 D6 D7 D8 D9 D10 D11 D12, D13 D14 D15 D16 D17 D18 D26 D21 D24 D25 D28 |
1 1 1 1 1 1 1 1 1 1 2 1 1 1 1 1 1 1 1 1 1 |
0,1 |
0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 |
40 |
1 |
0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 |
0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,2 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 |
| Кварц: 18 мГц 6 кГц |
B1 B2 |
1 1 |
0,07 0,07 |
0,5 0,5 |
40 |
1,5 |
0,105 0,105 |
0,105 0,105 |
| Резисторы: Млт – 0,25 |
R1 -R17 |
17 |
0,04 |
0,5 |
40 |
2,5 |
0,1 |
1,7 |
| Диоды: КД 522 Б |
V1 – V2 |
2 |
0,2 |
0,8 |
40 |
1,19 |
0,238 |
0,476 |
| Конденсаторы: К50–35 К10–7В |
С2 , С3 , С8 , С28 С21 С1 , С4 , С5 , С9 -С27 , С29 , С30 |
5 24 |
0,135 0,035 |
0,56 0,56 |
40 |
2 |
0,27 0,07 |
0,35 6,48 |
| Соединители: |
Х1 -Х10 |
10 |
0,05 |
0,4 |
10 |
0,5 |
5 |
|
| Выводы: Пайка |
507 |
0,004 |
1 |
1 |
0,045 |
2,028 |
||
| Провода: Дорожки монтажные |
439 |
0,015 |
1 |
1 |
0,015 |
6,585 |
Pc (2000) = 1 – (1-е-0,000005·2000 )2 = 0,9999
Рд (2000) = 0,9998
Р(2000) = е-Λ·2000 = 0,977, где Λ = ∑λi = 16,4· 10-6
Робщ (2000) = 0,9999·0,9998·0,967 = 0,967
2. Рассчитаем вероятность безотказной работы за время средней интенсивности эксплуатации.
Pc (8) = 1 – (1-е-0,000005·8 )2 = 0,99999999
Рд (8) = 0,99999999
Р(8) = е-Λ·8 = 0,999, где Λ = ∑λi = 16,4· 10-6
Робщ (8) = 0,99999999·0,99999999·0,999 = 0,9989
Доза отказа ИЭТ существенно зависит от интенсивности излучения ИИ, а ресурс изделий в радиационных полях в 2 –5 раз ниже показателей приводимых в ТУ на ИЭТ. [2]. При этом интенсивность отказов увеличивается в 2 – 5 раз, т.е.
Λ= 0,000049;
λс = 0,000015;
λд = 0,00002.
Получим
Рс и (8) = 0,9999999;
Рд и (8) = 0,9999999;
Ри (8) = 0,999;
Робщ (8) = 0,99899.
Рс и (2000) = 0,999;
Рд и (2000) = 0,998;
Ри (2000) = 0,906;
Робщ (2000) = 0,904.
Следовательно, в условиях действия ИИ от дефибриллятора и рентгеновского аппарата, вероятность безотказной работы по ГОСТу Р50444–92 не достаточна.
Для повышения надежности микроконтроллера необходимо:
1. Для эффективного уменьшения воздействий электромагнитных излучений рекомендуется экранирование микроконтроллера.
2. Заменить некоторые элементы на зарубежные аналоги:
КР580ВИ53 – времязадающее устройство на I8253;
К580ВК28 – комбинированное устройство на I8228;
К580ВМ80А – микропроцессор на I8080;
КР580ВВ51А – устройство управления вводом – выводом на I8251;
К1816ВЕ35 – микро – ЭВМ на I8025;
К555АП3 – формирователь разрядных токов на I4240;
КР580ВВ55А – I8255A;
К555ИД7 – SN74LS138N;
КР580ВН59 – I8259;
К555ЛЕ1 – SN74LS02N;
КР537РУ8А – HM6516;
КР580ВА87 – I8257;
К555ИР22 – SN74LS373N;
К580ВР43 – I8243.
Расчет интенсивности отказов зарубежных микропроцессоров производится по справочнику [6].
λ = (С1 · πт + С2 · πЕ )·πQ ·πL ·10-6 1/час,
где С1 – коэффициент, учитывающий количество элементов в кристалле микросхемы,
С2 – коэффициент, учитывающий количество ножек микросхемы, коэффициент, учитывающий
πт – коэффициент, учитывающий рабочую температуру микросхемы,
πЕ – коэффициент, учитывающий условия эксплуатации элемента (в данном случае на земле),
πQ – коэффициент, учитывающий качество изготовления,
πL – коэффициент, учитывающий время выращивания кристалла.
λ = (0,08·0,03+0,015·0,4)·0,9·1·10-6 = 0,0076·10-6
Заменив, отечественные микросхемы на их зарубежные аналоги, рассчитаем вероятность безотказной работы микроконтроллера.
Рз (8) = е-Λ·8 = 0,9998,
Рзобщ (8) = 0,99999999·0,99999999·0,9998 = 0,9998
Рз (2000) = е-Λ·2000 = 0,989, где Λз = 14,36
Робщ (2000) = 0,9999·0,9998·0,989 = 0,989
Такая вероятность безотказной работы соответствует ГОСТу Р50444–92 для изделий класса А.
2.2 Расчет экрана блока управления
Для повышения надежности необходимо экранировать блок печатных плат, находящихся в блоке управления, от внешних источников помех.
Экран представляет собой металлический параллелепипед, разделяющий две области пространства, и предназначен для регулирования распространения электромагнитных полей от одной из этих областей к другой.
Степень экранирования оценивается величиной коэффициента экранирования
К Э
=![]() ,
,
где Нн – напряженность наружного поля;
Нв – напряженность того же поля внутри экрана.
Предельно допустимый уровень воздействия магнитного поля для человека при длительном воздействии равен Нв =0,8 А/м. (Инструкция главного Государственного санитарного врача от 16.8.1977 №1742). Уровень магнитного поля от медицинской установки УМ-8 составляет 40А/м
КЭ
=![]()
Коэффициент экранирования материала рассчитывается по формуле [7,9]
КЭ
= .
, (2.2.1)
.
, (2.2.1)
где m – магнитная проницаемость материала;
Rв – среднее арифметическое внутренних размеров экрана по трем его главным осям;
Rн – среднее арифметическое наружных размеров экрана.
Толщина экрана
D=Rн -Rв (2.2.2)
Выведем формулу для расчета Rн
 , (2.2.3)
, (2.2.3)
Rв
=![]() мм
мм
Для экранирования электромагнитных полей используют материалы с высокой магнитной проницаемостью. В качестве такого материала подходит пермаллой [8].
Для пермаллоя марки 79 НМ m =20×103
Rн
= =228 мм
=228 мм
D=228–227,7=0,3 мм
Вывод: блок плат, находящихся в блоке управления необходимо экранировать пермоллоем марки 79НМ толщиной 0,3 мм. На чертеже КФБН941400.731 СБ представлен экран с размерами и полученной толщиной. Экран понижает интенсивность отказов элементов печатных плат в 2 – 3 раза, в результате чего повышается надежность блока управления, а так же и всего аппарата.
2.3 Расчет основных параметров следящей системы
Рассчитаем момент инерции всей системы. Он равен суммарному моменту ее составляющих.
J=Jпр +Jдв. +Jтг , (2.3.1)
где Jпр – момент инерции системы,
Jдв – момент инерции двигателя,
Jтг – момент инерции тахогенератора.
Jдв =1,2×10-4 кг×м2 ,
Jтг =0,5×10-4 кг×м2 [11].
На валу расположены цилиндрические кулачки с радиусом 0,02 м и длиной 0,01 м. Момент инерции одного кулачка равен
![]() , (2.3.2)
, (2.3.2)
где m – масса кулачка,
R – радиус кулачка.
![]() , (2.3.3)
, (2.3.3)
где Р=7,7×103 кг/м3 ,
V=p×R2 ×L=3,14×0,004×0,01=1,256×10-5 м3 .
![]() кг.
кг.
![]() кг×м2
кг×м2
Так как на валу стоит три кулачка, то Jпр =5,7×10-6 кг×м2 .
Момент инерции всей системы
J= 1,2×10-4 +0,5×10-4 +0,057×10-4 =1,757×10-4 кг×м2
Рассчитаем коэффициент вязкого трения двигателя
F
=
 ,
(2.3.4)
,
(2.3.4)
где kм = 7,19 – коэффициент характеризующий магнитную проводимость магнитопровода электродвигателя,
kе =1,2 – коэффициент прпорциональности характеризующий конструкцию электродвигателя,
Ф=6×10-4 Вб,
Rа =180 Ом – сопротивление ротора.
![]() .
.
Рассчитаем коэффициент успокоения, вносимого тахогенератором
![]() , (2.3.5)
, (2.3.5)
где km – передаточный коэффициент тахогенератора,
kу =20 – коэффициент усиления усилителя по напряжению,
kdU – коэффициент пропорциональности между пусковым моментом двигателя и приложенным к его якорю напряжением.
![]() , (2.3.6)
, (2.3.6)
![]() , (2.3.7)
, (2.3.7)
где W= 141,4 – скорость вращения тахогенератора,
Uвых =11В – выходное напряжение тахогенератора,
Мп – пусковой момент двигателя.
![]() , (2.3.8)
, (2.3.8)
![]()
где Мном – номинальный момент двигателя.
![]() , (2.3.9)
, (2.3.9)
где Р=50В=510 кг×см/сек
![]() кг×см,
кг×см,
![]() кг×см.
кг×см.
![]() ,
,
![]()
Получим
![]() .
.
Рассчитаем передаточный коэффициент ситемы
![]() (2.3.10)
(2.3.10)
где kп =0,08 В/рад – коэффициент показывающий, какое напряжение сигнала ошибки приходится на единицу угла рассогласования.
![]()
2.4 Моделирование работы электропривода
В данном разделе проводится моделирование следящей системы, дифференциальное уравнение движение которой было получено в пункте (1.4) и имеет вид
![]()
Рассмотрим, как ведет себя следящая система в переходном процессе. Для этого следует задаться определенным законом движения входного вала системы.
Пусть до момента t=0 система находится в покое и ее выходной вал неподвижен. В
момент t=0 входной вал начинает вращаться с постоянной скоростью.
Для этих условий уравнение движения следящей системы примет вид:
![]() (2.4.1)
(2.4.1)
для следящих систем в переходных процессах можно пренебречь влиянием статического момента нагрузки Мст по сравнению с динамическим моментом Мдин . Это значительно облегчает анализ системы, так как упрщается ее дифференциальное уравнение.
Итак, пренебрегая статическим моментом нагрузки, получим
![]() (2.4.2)
(2.4.2)
Передаточная функция будет иметь вид
![]() (2.4.3)
(2.4.3)
![]()
График переходного процесса представлен на рисунке (2.4.1.)
Время переходного процесса tп.п. = 0,12 сек
Перерегулирование s=![]() 42,87%.
42,87%.
Для сравнения приведем график переходного процесса для системы без тахогенератора.
Передаточная функция в этом случае будет иметь вид
![]() (2.4.4)
(2.4.4)
![]()
График переходного процесса представлен на рисунке (2.4.2)
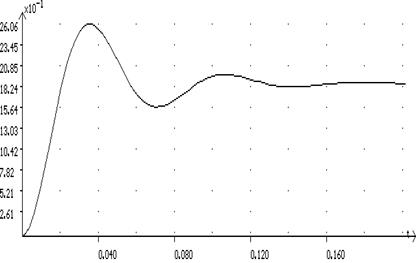
Рисунок 2.4.1 График переходного процесса следящей системы
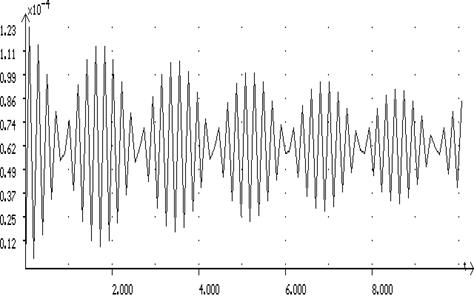
Рисунок 2.4.2 График переходного процесса системы без тахогенератора
Переходный процесс для двигателя получился колебательный, поэтому на выходе воздуходувки воздух выходит не равномерно. Для того, чтобы сгладить неравномерность в АИВЛ «Спирон-210» перед и после воздуходувки были установлены ресиверы. После того как установили тахогенератор, колебания уменьшились и на много раньше установился установившийся режим.
2.5 Расчет основных параметров электродвигателя
Тип двигателя АВЕ-052–4
Технические данные: [11]
Полезная мощность на валу P2 =50 Вт
Скорость вращения ротора n =1350 об/мин.
Частота сети f=50 Гц
Напряжение питательной сети U1 =220 В
Напряжение на зажимах управляющей обмотки U3 =220 В
Число фаз статора m1 =2
Момент инерции ротора 1,2 кг×см2
Кратность пускового момента mp =0,5
Электоромеханическая постоянная времени ТМ =0,2 сек
Cos φ = 0,95
КПД = 50%.
Весь расчет ведется по справочникам [10, 11].
Основные размеры двигателя
1. Расчетная мощность:
![]() Вт. (2.5.1.)
Вт. (2.5.1.)
где ξ=0,8÷0,94
2. Машинная постоянная:
![]() (2.5.2.)
(2.5.2.)
где: Kω=0,86÷0,96 – обмоточный коэффициент
α=0,64
Bδ=0,25÷0,6 Тл – амплитуда индукции в воздушном зазоре
AS=60÷240 А/см – линейная нагрузка статора.
3. Диаметр расточки и расчетная длина пакета статора
 мм (2.5.3.)
мм (2.5.3.)
l 0 = ξ · Da = 36,5 мм. (2.5.4.)
По ГОСТ 6636–60 Da =42 мм; l 0 =36 мм.
Материал – листовая электротехническая сталь марки Э12, толщиной 0,5 мм. (ГОСТ 802–58).
4. Полюсной шаг
![]() мм (2.5.5.)
мм (2.5.5.)
где 2p=4
Обмотки статора
5. Тип обмотки. Принимаем двухслойную обмотку с целым числом пазов, приходящихся на один полюс и фазу и сокращенным шагом.
6. Число пазов статора
![]() (2.5.6.)
(2.5.6.)
где q1 =2 – число пазов, приходящихся на полюс и фазу
7. Шаг обмотки статора по пазам
![]() – полюсной шаг по пазам (2.5.7.)
– полюсной шаг по пазам (2.5.7.)
![]() (2.5.8.)
(2.5.8.)
где λ=0,8÷0,85
8. Обмоточный коэффициент обмотки статора
![]() (2.5.9.)
(2.5.9.)
где:
 – коэффициент распределения обмотки
– коэффициент распределения обмотки
![]() – коэффициент сокращения шага обмотки
– коэффициент сокращения шага обмотки
1. Выбор отношения потребляемой мощности управляющей обмоткой из сети Рз [Вт] к потребляемой мощности главной обмотки Р1 :
![]() (2.5.10.)
(2.5.10.)
примем ![]()
2. Выбор индукции в воздушном зазоре и линейной нагрузки статора для управляющей обмотки.
![]() (2.5.11)
(2.5.11)
где: ![]() – амплитуда индукции в воздушном зазоре, создаваемая магнитодвижущей силой управляющей обмотки статора, Тл.
– амплитуда индукции в воздушном зазоре, создаваемая магнитодвижущей силой управляющей обмотки статора, Тл.
![]() - действительная линейная нагрузка статора для управляющей обмотки, а/см.
- действительная линейная нагрузка статора для управляющей обмотки, а/см.
3. Амплитуды полезных магнитных потоков в воздушном зазоре, создаваемые магнитодвижущей силой главной и управляющей обмоток статора
![]() Вб (2.5.12)
Вб (2.5.12)
![]() Вб (2.5.13)
Вб (2.5.13)
4. Число витков главной и управляющей обмоток статора.
![]() (2.5.14)
(2.5.14)
где:![]() В (2.5.15)
В (2.5.15)
![]() (2.5.16)
(2.5.16)
![]() В (2.5.17)
В (2.5.17)
13. Число проводников в пазах статора
![]()
![]() ;
;![]() (2.5.18)
(2.5.18)
14. Предварительные значения потребляемых токов главной и управляющей обмоток статора при номинальной нагрузке двигателя.
![]() А (2.5.19)
А (2.5.19)
![]() А (2.5.20)
А (2.5.20)
15. Сечение и диаметр проводов обмоток статора
![]() мм2
(2.5.21)
мм2
(2.5.21)
![]() - плотность тока = 3¸5 а/мм2
- плотность тока = 3¸5 а/мм2
![]() мм2
мм2
По ГОСТ 2773–51 ![]() = 0,066 мм2
= 0,066 мм2
![]() марка провода ПЭЛ
марка провода ПЭЛ
![]() мм2
;
мм2
; ![]() марка провода ПЭЛ
марка провода ПЭЛ
16. Площадь сечения паза статора.
![]() мм2
(2.5.22)
мм2
(2.5.22)
где ![]() =0,32¸0,44 – коэффициент заполнения паза статора изолированным проводом.
=0,32¸0,44 – коэффициент заполнения паза статора изолированным проводом.
17. Размеры пазов и зубцов статора.
Примем полузакрытые пазы трапециидальной формы с одинаковой толщиной зубца по высоте.
Минимальная допустимая толщина зубца статора:
![]() мм. (2.5.23)
мм. (2.5.23)
где ![]() – максимальная индукция в зубцах статора, может допускаться до 1,2 Тл.
– максимальная индукция в зубцах статора, может допускаться до 1,2 Тл.
t1 – зубцовой шаг по окружности расточки статора
![]() мм. (2.5.24)
мм. (2.5.24)
Прорезь паза статора
![]() *
*![]() мм. (2.5.25)
мм. (2.5.25)
![]() мм;
мм; ![]() мм;
мм; ![]()
18. Площадь, занимаемая пазовой изоляцией.
![]() мм2
(2.5.26)
мм2
(2.5.26)
где ![]() – 0,3¸0,5 мм – толщина пазовой изоляции из лакоткани МИС – 0,1 мм (ГОСТ 2214–46) и электрокартона ЭВ – 0,25 мм (ГОСТ 2824–56).
– 0,3¸0,5 мм – толщина пазовой изоляции из лакоткани МИС – 0,1 мм (ГОСТ 2214–46) и электрокартона ЭВ – 0,25 мм (ГОСТ 2824–56).
П – периметр паза, П=44 мм.
Площадь, занимаемая клином
![]() мм2
мм2
Проверка технологического коэффициента заполнения части паза статора, занимаемой изолированным проводом.
![]() , что вполне допустимо. (2.5.27)
, что вполне допустимо. (2.5.27)
19. Средняя длина проводника обмотки статора
![]() мм (2.5.28)
мм (2.5.28)
для обмотки с сокращенным статором k=1,5.
20. Активные сопротивления главной и вспомогательной обмоток статора при 20о С
![]() ом (2.5.29)
ом (2.5.29)
![]() ом. (2.5.30)
ом. (2.5.30)
21. Активное сопротивление этих обмоток в нагретом состоянии при Jo C
![]() ом; (2.5.31)
ом; (2.5.31)
![]() ом. (2.5.32)
ом. (2.5.32)
где ![]() – температура нагрева обмотки статора, о
С (2.5.33)
– температура нагрева обмотки статора, о
С (2.5.33)
![]() температура окружающей среды, о
С
температура окружающей среды, о
С
![]() – превышение температуры обмотки статора над температурой окружающей среды, о
С.
– превышение температуры обмотки статора над температурой окружающей среды, о
С.
 ом. (2.5.34)
ом. (2.5.34)
22. Удельная магнитная проводимость для потоков рассеяния обмотки статора:
а) для пазового потока рассеяния
 Гн/см.
Гн/см.
где ![]() 0 мм (2.5.35)
0 мм (2.5.35)
![]() мм;
мм; ![]() 0 мм (2.5.36)
0 мм (2.5.36)
![]() (2.5.37)
(2.5.37)
б) для потоков рассеяния вокруг лобовых частей обмотки статора
![]() Гн/см. (2.5.38)
Гн/см. (2.5.38)
где ![]() мм. (2.5.39)
мм. (2.5.39)
в) удельная магнитная проводимость для потоков рассеяния между вершинами зубцов статора
![]() Гн/см (2.5.40)
Гн/см (2.5.40)
Полная удельная магнитная проводимость для потоков рассеяния обмотки статора
![]() Гн/см (2.5.41)
Гн/см (2.5.41)
23. Индуктивное сопротивление цепи намагничивания, приведенное к числу витков главной обмотки статора
![]() ом (2.5.42)
ом (2.5.42)
где ![]() - коэффициент воздушного зазора
- коэффициент воздушного зазора
![]() – коэффициент насыщения магнитной цепи двигателя
– коэффициент насыщения магнитной цепи двигателя
![]() – длина одностороннего воздушного зазора между расточкой статора и ротором.
– длина одностороннего воздушного зазора между расточкой статора и ротором.
Обмотки ротора
24. Диаметр ротора
![]() мм (2.5.43)
мм (2.5.43)
Материал – листовая электротехническая сталь марки Э44 толщиной 0,35 мм (ГОСТ 802–58).
25. Число пазов ротора с беличьей клеткой.
При выборе числа пазов ротора необходимо соблюдать следующие условия:
а) для уменьшения влияния тормозящих асинхронных моментов от зубцовых гармоник при вращении ротора.
![]()
б) для снижения влияния синхронных моментов от высших гармоник при пуске двигателя
![]() , где g=1, 2, 3…
, где g=1, 2, 3…
![]()
в) во избежание тормозящих синхронных моментов от высших гармоник при вращении ротора
![]()
![]()
г) для уменьшения одностороннего притяжения ротора к расточке статора и радиальных вибрационных сил
![]()
![]()
В итоге принимаем Z2 =14.
26. Токи стержня и короткозамыкающих колец ротора
![]() А (2.5.44.)
А (2.5.44.)
где k=0,3¸0,6; m1 =1.
 А. (2.5.45.)
А. (2.5.45.)
27. Сопротивление беличьей клетки ротора.
Активное сопротивление ротора, приведенное к главной обмотке статора, при рабочей температуре двигателе должно быть ![]() ; примем
; примем ![]() ом (при
ом (при ![]() ом).
ом).
Материал для стержней – никелин, электропроводность ![]() м/ом×мм2
при 20о
С.
м/ом×мм2
при 20о
С.
Короткозамыкающие кольца выпускаются из красной меди с ![]() м/ом×мм2
при 20о
С.
м/ом×мм2
при 20о
С.
Коэффициенты увеличения сопротивлений никелина и меди при повышении температуры нагрева ротора до ![]() о
С соответственно будут:
о
С соответственно будут: ![]() .
.
Приведенное активное сопротивление ротора
 (2.5.46)
(2.5.46)
следовательно: ![]() ом (2.5.47)
ом (2.5.47)
Размеры беличьей клетки ротора.
Поперечное сечение короткозамкнутого кольца
![]() мм2
, где
мм2
, где ![]() А/мм2
– плотность тока (2.5.48)
А/мм2
– плотность тока (2.5.48)
Ширина кольца принята ![]() мм, тогда толщина кольца
мм, тогда толщина кольца
![]() мм (2.5.49)
мм (2.5.49)
Активное сопротивление сегмента короткозамкнутого кольца между двумя стержнями:
![]() (2.5.50)
(2.5.50)
где ![]() мм. (2.5.51)
мм. (2.5.51)
Активное сопротивление стержня.
![]() ом. (2.5.52)
ом. (2.5.52)
Поперечное сечение стержня.
![]() мм2
. (2.4.53)
мм2
. (2.4.53)
Диаметр стержня ротора
![]() мм. (2.5.54)
мм. (2.5.54)
Плотность тока в стержне
![]() А/мм2
, что вполне допустимо, т. к.
А/мм2
, что вполне допустимо, т. к. ![]() А/мм2
А/мм2
(2.5.55)
28. Размеры пазов и зубцов ротора.
![]() мм (2.5.56)
мм (2.5.56)
Проверка максимальной индукции в узком сечении зубца ротора.
![]() Тл (2.5.57)
Тл (2.5.57)
29. Удельная магнитная проводимость для потоков рассеяния беличьей клетки ротора.
а) для пазового потока рассеяния
 Гн/см (2.5.58)
Гн/см (2.5.58)
б) для потоков рассеяния между вершинами зубцов ротора
![]() Гн/см (2.5.59)
Гн/см (2.5.59)
в) для потоков рассеяния вокруг короткозамкнутых колец
 Гн/см (2.5.60)
Гн/см (2.5.60)
Тогда полная удельная магнитная проводимость для потоков рассеяния беличьей клетки ротора.
![]() Гн/см. (2.5.61)
Гн/см. (2.5.61)
30. Индуктивное сопротивление беличьей клетки ротора, приведенное к числу витков главной обмотки статора.
![]() ом. (2.5.62)
ом. (2.5.62)
Магнитная система электродвигателя
31. Величина наружной поверхности корпуса двигателя, включая два подшипниковых щита.
 мм2
(2.5.63)
мм2
(2.5.63)
где ![]() Вт/см2
– удельная тепловая нагрузка при превышении температуры поверхности корпуса над температурой окружающей среды.
Вт/см2
– удельная тепловая нагрузка при превышении температуры поверхности корпуса над температурой окружающей среды.
32. Наружный диаметр корпуса двигателя.
![]() мм, (2.5.64)
мм, (2.5.64)
где ![]() 0 мм – длина корпуса. (2.5.65)
0 мм – длина корпуса. (2.5.65)
По ГОСТ 6636–60 ![]() 0 мм;
0 мм; ![]() мм.
мм.
33. Наружный диаметр пакета стали статора.
![]() мм, (2.5.66)
мм, (2.5.66)
где ![]() - толщина корпуса двигателя.
- толщина корпуса двигателя.
34. Высота сердечника пакета статора.
![]() мм. (2.5.67)
мм. (2.5.67)
Проверка индукции в сердечнике статора
![]() Тл, что вполне допустимо т. к.
Тл, что вполне допустимо т. к. ![]() Тл.
Тл.
35. Магнитодвижущая сила для воздушного зазора:
коэффициент воздушного зазора
![]() , (2.5.68)
, (2.5.68)
тогда магнитодвижущая сила для воздушного зазора
![]() (2.5.69)
(2.5.69)
36. Магнитодвижущая сила для зубцов статора.
![]() Тл, тогда (2.5.70)
Тл, тогда (2.5.70)
магнитодвижущая сила для зубцов статора
![]() , (2.5.71)
, (2.5.71)
где ![]() для стали марки Э12.
для стали марки Э12.
37. Магнитодвижущая сила для сердечника статора:
индукция в сердечнике статора.
![]() Тл; (2.5.72)
Тл; (2.5.72)
Средняя длина пути магнитного потока в сердечнике
![]() мм, тогда (2.5.73)
мм, тогда (2.5.73)
магнитодвижущая сила для сердечника статора
![]() , (2.5.74)
, (2.5.74)
где ![]() для стали марки Э12.
для стали марки Э12.
38. Магнитодвижущая сила для зубцов ротора:
индукция по минимальному сечению зуба
![]() Тл, тогда (2.5.75)
Тл, тогда (2.5.75)
магнитодвижущая сила для зубцов ротора
![]() , (2.5.76)
, (2.5.76)
где ![]() для стали марки Э12.
для стали марки Э12.
39. Магнитодвижущая сила для сердечника ротора:
индукция в сердечнике ротора
![]() Тл, (2.5.77)
Тл, (2.5.77)
где ![]() мм – высота сердечника ротора (2.5.78.)
мм – высота сердечника ротора (2.5.78.)
![]() мм – диаметр вала. (2.5.79)
мм – диаметр вала. (2.5.79)
Средняя длина пути магнитного потока в роторе:
![]() мм, тогда (2.5.80)
мм, тогда (2.5.80)
магнитодвижущая сила для сердечника ротора:
![]() , (2.5.81)
, (2.5.81)
где ![]() для стали марки Э12.
для стали марки Э12.
40. Общая магнитодвижущая сила холостого хода главной обмотки статора.
![]() (2.5.82)
(2.5.82)
Коэффициент насыщения магнитной системы двигателя
![]() (2.5.83)
(2.5.83)
Ток холостого хода электродвигателя
41. Реактивная составляющая тока холостого хода двигателя.
![]() А. (2.5.84)
А. (2.5.84)
42. Масса стали статора асинхронного двигателя.
а) масса зубцов статора
![]() кг; (2.5.85)
кг; (2.5.85)
б) масса сердечника статора
![]() кг, (2.5.86)
кг, (2.5.86)
где ![]() мм – диаметр окружности основания пазов статора.
мм – диаметр окружности основания пазов статора.
43. Магнитные потери в активной стали.
Магнитные потери в зубцах статора
 Вт (2.5.87)
Вт (2.5.87)
Магнитные потери в сердечнике статора
 Вт, (2.5.88)
Вт, (2.5.88)
где ![]() Вт/кг – удельные потери в стали марки Э12 – 0,5 мм при индуктивности 1 Тл и частоте 50 Гц по ГОСТ 802–58.
Вт/кг – удельные потери в стали марки Э12 – 0,5 мм при индуктивности 1 Тл и частоте 50 Гц по ГОСТ 802–58.
Общие магнитные потери в стали статора
![]() Вт. (2.5.89)
Вт. (2.5.89)
44. Потери в меди обмотки статора при холостом ходе приближенно равны:
![]() Вт. (2.5.90)
Вт. (2.5.90)
45. Электрические, магнитные и механические потери холостого хода двигателя
![]() Вт. (2.5.91)
Вт. (2.5.91)
46. Активная составляющая тока холостого хода
![]() А. (2.5.92)
А. (2.5.92)
47. Ток холостого хода двигателя
![]() А. (2.5.93)
А. (2.5.93)
48. Активное сопротивление намагничивающего контура, эквивалентное магнитным потерям в стали статора
![]() (2.5.94)
(2.5.94)
Потери и К.П.Д. двигателя
49. Потери в меди обмоток статора и ротора.
![]() Вт; (2.5.95)
Вт; (2.5.95)
![]() , (2.5.96)
, (2.5.96)
где ![]() Вт.
Вт.
50. Магнитные потери в стали статора.
![]() Вт из пункта 42.
Вт из пункта 42.
51. Механические потери в двигателе:
потери на трение в подшипниках
![]() Вт, (2.5.97)
Вт, (2.5.97)
где ![]() ;
; ![]() - скорость вращения ротора при нагрузке.
- скорость вращения ротора при нагрузке.
Масса ротора с беличьей клеткой
![]() кг (2.5.98)
кг (2.5.98)
Потери на трение ротора в воздухе
![]() Вт. (2.5.99)
Вт. (2.5.99)
Полные механические потери в двигателе
![]() Вт. (2.5.100)
Вт. (2.5.100)
52. Общие потери в двигателе при нагрузке.
![]() Вт, (2.5.101)
Вт, (2.5.101)
где ![]() - коэффициент, учитывающий добавочные потери в двигателе.
- коэффициент, учитывающий добавочные потери в двигателе.
53. Потребляемая асинхронным двигателем активная мощность из сети.
![]() Вт. (2.5.102)
Вт. (2.5.102)
По условию ![]() Вт.
Вт.
Тепловой расчет двигателя.
1. Превышение температуры статора двигателя.
Удельные потери:
В меди обмотки статора: ![]() (2.5.103)
(2.5.103)
В стали статора: ![]() (2.5.104)
(2.5.104)
Трения: ![]() (2.5.105)
(2.5.105)
2. Междувитковая изоляция проводников в пазу:
![]()
![]() мм (2.5.106)
мм (2.5.106)
где 
3. Общая толщина изоляции от меди до стенки паза:
![]() мм, (2.5.107)
мм, (2.5.107)
где dи =0,3 мм.-толщина пазовой изоляции и изоляции одной стороны проводника.
4. Результирующий коэффициент теплоотдачи наружной поверхности статора:
![]() , (2.5.108)
, (2.5.108)
где a – коэффициент теплопроводности междувитковой изоляции проводов в пазу и пазовой изоляции.
![]()
5. Среднее превышение температуры обмотки статора над окружающей средой.
 (2.5.109)
(2.5.109)
2.6 Расчет надежности
Свойство изделия, обеспечивающее его возможность выполнять заданные функции, сохраняя свои эксплуатационные показатели в заданных пределах в течение требуемого промежутка времени или требуемой наработки, называют надежностью системы. Для медицинской промышленности проблема надежности имеет большое значение. Во-первых выход из строя медицинской техники приводит к ее простою, а это ухудшает показатели системы массового обслуживания, в которой эта техника работает; во-вторых, возникает проблема квалифицированного ремонта, которую, учитывая специфику работы учреждений здравоохранения, решить не просто; в-третьих, неисправность медицинской техники может вызвать крайне нежелательные проблемы для пациента: врач может поставить неверный диагноз или нарушить требуемую дозировку терапевтического воздействия. Наконец, в ряде случаев, если устройство входит в систему жизнеобеспечения (например, наркозная или реанимационная техника), отказ в устройстве создает непосредственную угрозу жизни больного. Такой же результат наблюдается и в случае отказа, нарушающего электробезопасность устройства.
Правильный выбор и назначение показателей надежности зависят в основном от той функциональной задачи, которую выполняет изделие в лечебно – диагностическом процессе.
В данном разделе проводится расчет надежности блока управления аппарата искусственной вентиляции легких «Спирон-201».
Блок управления содержит следующие элементы: плата питания ИМ, плата питания ИС, плата ввода – вывода, плата управления индикацией, микроконтроллер, плата питания ВИП.
Коэффициенты нагрузки, интенсивности отказов и поправочные коэффициенты взяты из справочников [2,3,4] и сведены в таблицах 2.6.1, 2.6.2, 2.6.3.2.6.4, 2.6.5. Рабочая температура дается в соответствии с паспортными данными прибора по [1].
Для повышения вероятности безотказной работы соединителей и дорожек монтажных применено их дублирование. Следовательно, вероятность безотказной работы соединителей и дорожек монтажных рассчитывается по формулам:
Pп (t) = 1 – (1 – e- λс t )2 (2.6.1)
![]() PД
(t) =1 – (1 – e-
λД
t
)2
(2.6.2)
PД
(t) =1 – (1 – e-
λД
t
)2
(2.6.2)
Вероятность безотказной работы остальных элементов блока управления определяется уточненным средне – групповым методом по формуле:
![]() , (2.6.3)
, (2.6.3)
где li - интенсивность отказа элемента;
Pобщ i (t) = Pc (t)· Pд (t)·P(t) (2.6.4)
Вероятность безотказной работы всего блока управления рассчитывается по формуле:
P у = å Pобщ i (t) (2.6.5)
Вероятность безотказной работы рассчитывается в течение заданной наработки на отказ и в течении средней интенсивности эксплуатации.
Рассчитаем вероятность безотказной работы платы питания ВИП (таблица 2.6.1)
L=ålI =1,0345*10-6
Pобщ . 1 (2000)= e- L 2000 = e-0,0021 =0,997
Pобщ . 1 (8)= e- L 8 = e-0,00 =0,99997
Рассчитаем вероятность безотказной работы платы ввода – вывода (таблица 2.6.2)
L=ålI =26,51*10-6
P(2000)= e- L 2000 = e-0,053 =0,988
P(8)= e- L 8 = e-0,00021 =0,9997
Pп (2000)= 1 – (1-e- l п 2000 )=1 – (1 – e-0,002 )=0,99999
Pп (8)= 1 – (1-e- l п 8) =1 – (1 – e-0,000008 )=0,999999999
Pп (2000)= 1 – (1-e- l д 2000 )=1 – (1 – e-0,003 )=0,99999
Pд (8)= 1 – (1-e- l д 8) =1 – (1 – e-0,000012 )=0,99999998
Робщ . 2 (2000)= Р(2000)×Рд (2000)×Рп (2000)=0,988×0,99999×0,99999=0,988
Робщ. 2 (8)= Р(8)×Рд (9)×Рп (8)=0,9997×0,999999999×0,99999998=0,9996
2.6.3 Рассчитаем вероятность безотказной работы платы питания ИМ (таблица 2.6.3)
L=ålI =2,773*10-6
P(2000)= e- L 2000 = e-0,00555 =0,9988
P(8)= e- L 8 = e-0,000022 =0,99999
Pп (2000)= 1 – (1-e- l п 2000 )=1 – (1 – e-0,0005 )=0,999999
Pп (8)= 1 – (1-e- l п 8) =1 – (1 – e-0,000002 )=1
Pд (2000)= 1 – (1-e- l д 2000 )=1 – (1 – e-0,00093 )=0,999999
Pд (8)= 1 – (1-e- l д 8) =1 – (1 – e-0,0000037 )=1
Робщ .3 (2000)= Р(2000)×Рд (2000)×Рп (2000)=0,9988×0,999999×0,999999=0,998
Робщ.3 (8)= Р(8)×Рд (8)×Рп (8)=0,99999×1×1=0,99999
Рассчитаем вероятность безотказной работы платы питания МС (таблица 2.6.4)
L=ålI =15,7857*10-6
P(2000)= e- L 2000 = e-0,0318 =0,989
P(8)= e- L 8 = e-0,000127 =0,9998
Pп (2000)= 1 – (1-e- l п 2000 )=1 – (1 – e-0,00074 )=0,999999
Pп (8)= 1 – (1-e- l п 8) =1 – (1 – e-0,0000029 )=1
Pп (2000)= 1 – (1-e- l д 2000 )=1 – (1 – e-0,00138 )=0,99999
Pд (8)= 1 – (1-e- l д 8) =1 – (1 – e-0,0000055 )=1
Робщ .4 (2000)= Р(2000)×Рд (2000)×Рп (2000)=0,989×0,999999×0,99999=0,98899
Робщ.4 (8)= Р(8)×Рд (9)×Рп (8)=0,9998×1×1=0,9998
Рассчитаем вероятность безотказной работы платы управления индикацией (таблица 2.6.5)
L=ålI =28,1*10-6
P(2000)= e- L 2000 = e-0,0562 =0,98
P(8)= e- L 8 = e-0,00022 =0,9997
Pп (2000)= 1 – (1-e- l п 2000 )=1 – (1 – e-0,0014 )=0,999999
Pп (8)= 1 – (1-e- l п 8) =1 – (1 – e-0,0000058 )=1
Pп (2000)= 1 – (1-e- l д 2000 )=1 – (1 – e-0,0039 )=0,99998
Pд (8)= 1 – (1-e- l д 8) =1 – (1 – e-0,00002 )=1
Робщ .5 (2000)= Р(2000)×Рд (2000)×Рп (2000)=0,98×0,999999×0,99998=0,98
Робщ.5 (8)= Р(8)×Рд (9)×Рп (8)=0,9997×1×1=0,9997
Вероятность безотказной работы всего блока управления
Ру. (2000)=Робщ.1 (2000)×Робщ.2 (2000) ×Робщ.3 (2000) ×Робщ.4 (2000)
×Робщ.5 (2000) × Робщ.6 (2000),
Ру. (8)=Робщ.1 (8)×Робщ.2 (8) ×Робщ.3 (8) ×Робщ.4 (8)
×Робщ.5 (8) × Робщ.6 (8),
где Робщ.6 (2000)=0,989 и
Робщ.6 (8)=0,9998 – вероятность безотказной работы микроконтороллера.
Ру (8)= 0,9996×0,99997×0,99999×0,9998×0,9997×0,9998=0,9988
Ру (2000)=0,997×0,988×0,998×0,98899×0,98×0,989=0,968
Полученная вероятность безотказной работы соответствует ГОСТу Р50444–92 для изделий класса А.
Определим среднюю наработку до отказа:
Т=1/Lобщ,
Lобщ. =88,56 – суммарный поток отказов.
Т=1/88,56×103 =11290 часов.
| Наименование и тип элемента |
Обозначение по чертежу |
Количество Ni |
Интенсивность отказа при номинальном режиме l0 i *10-6 1/ч |
Режим работы |
Поправочный Коэффициент Аi |
Интенсивность отказов i-го элемента Аi * loi * 10-6 , 1/ч |
Интенсивность отказа изделия Из-за элементов i-го типа Ni * Ai * loi * 10-6 , 1/ч |
|
| Коэф-т нагрузки Кн |
Температура рабочая Т,о С |
|||||||
| Микросхемы: К142ЕН9Е |
D1 |
1 |
0,1 |
0,5 |
40 |
1 |
0,1 |
0,1 |
| Резисторы: С2 -33Н – 0,5–75 ОМ±5% С2 -33Н – 0,5–3 кОМ±5% Конденсаторы: К50–24–63В-2200 мкФ К73–11–250В – 0,33 мкФ К50–24–63В-100мкФ Прибор выпрямительный КЦ402А Индикатор единичный АЛ307КМ Вилка РШ 2НМ-1–5 Пайка Провода |
R1 …R3 R4 С1 С2 С3 V1 V2 X1 |
3 1 1 1 1 1 1 1 24 18 |
0,04 0,04 0,135 0,035 0,135 0,02 0,2 0,01 0,004 0,015 |
0,5 0,5 0,9 0,9 0,9 0,5 0,8 1 1 1 |
40 40 40 40 40 40 40 40 |
2,5 2,5 0,9 0,9 0,9 0,6 1,19 1 1 1 |
0,1 0,1 0,1215 0,0315 0,1215 0,012 0,238 0,01 0,004 0,015 |
0.3 0,1 0,1215 0,0315 0,1215 0,012 0,238 0,01 0,096 0,27 |
Таблица 2.6.2. Плата ввода – вывода
| Наименование и тип элемента |
Обозначение по чертежу |
Количество Ni |
Интенсивность отказа при номинальном режиме l0 i *10-6 1/ч |
Режим работы |
Поправочный Коэффициент Аi |
Интенсивность отказов i-го элемента Аi * loi * 10-6 , 1/ч |
Интенсивность отказа изделия Из-за элементов i-го типа Ni * Ai * loi * 10-6 , 1/ч |
|
| Коэф-т нагрузки Кн |
Температура рабочая Т,о С |
|||||||
| Микросхемы: КР1006ВИ1 КР544УД1В К555ЛН1 К155ЛП9 КР590КН6 К1113ПВ1А К555ЛН2 К155ЛП10 К155ЛП11 К555ЛАЗ |
D2 D3, D4 , D8 D1, D9 , D10 D5 , D11 D12 D13 D14 , D17 D15 D16 D19… D22 |
1 3 3 2 1 1 2 1 1 4 |
0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 |
0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 |
40 |
1 |
0,1 |
0,1 0,3 0,3 0,2 0,1 0,1 0,2 0,1 0,1 0,4 |
| Резисторы: С2–33Н – 0,125–3 кОм±5%-А-Д С2–33Н – 0,125–820Ом±5%-А-Д С2–33Н – 0,125–3,9кОм±5%-А-Д С2–33Н – 0,125–10кОм±5%-А-Д С2–33Н – 0,125–75кОм±5%-А-Д С2–33Н – 0,125–4,7кОм±5%-А-Д С2–33Н – 0,125- 3,3 кОм±5%-А-Д С2–33Н – 0,125–330Ом±5%-А-Д С2–33Н – 0,25–160 кОм±5%-А-Д С2–33Н – 0,25–8,2 кОм±5%-А-Д С2–33Н – 0,5–510 Ом±5%-А-Д С2–33Н – 0,25–560Ом±5%-А-Д С2–33Н – 0,25–240 кОм±5%-А-Д С2–33Н – 0,5–2 Ом±5%-А-Д СП5–22В-1Вт – 1,5 кОм±10% СП5–22В-1Вт-10 кОм±10% СП5–22В-1Вт – 1,0 кОм±10% Конденсаторы: КМ-5б-Н90–0,033 мкФ КМ-5б-Н90–0,1 мкФ К53–14–32В-15 мкФ±30% К53–14–25В-22 мкФ±30% К50–16–50В-100 мкФ-В Диод полупроводниковый КД521В Транзистор КT1817В Транзистор КТ315В Транзистор КТ819В Индикатор единичный АЛ307Км Вилка СНП58–64/94х9В-23–2–0 Пайка Провода |
R1 , R2 , R9 , R10 R3 , R19 , R29 R31 , R33 , R34 , R36 , R42 , R46 , R53 …R55 R4 , R5 R6 , R8 R11 , R12 R13 ..R15 , R17 , R18 , R28 , R77 …R82 R20 R21 …R26 , R47 …R52 R37 R38 R39 R65 …R70 R89 …R94 R71 …R76, R95 …R100 R82 …R88 R7 R5 , R16 , R35 , R40 , R41 R27 С1 С2 , С3 , С5 , С9 …С20 С4 С21 , С22 С23 V1 , V2 V3 V10 V25 …V30 V4 …V9 V13 …V18 X1 , X2 |
4 13 2 2 2 12 1 12 1 1 1 12 12 7 1 5 1 1 15 1 2 1 2 1 1 6 12 2 260 104 |
0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,053 0,053 0,053 0,6 0,6 0,6 0,6 0,135 0,2 0,5 0,5 0,5 0,2 0,01 0,004 0,015 |
0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,9 0,9 0,5 0,5 0,9 0,8 0,8 0,8 0,8 0,8 1 1 1 |
40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 |
2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 0,3 0,3 0,3 0,7 0,7 2 2 0,9 1,19 0,9 0,9 0,9 1,19 1 1 1 |
0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,0159 0,0159 0,0159 0,42 0,42 1,2 1,2 0,1215 0,238 0,45 0,45 0,45 0,238 0,01 0,004 0,015 |
0,4 0,13 0,2 0,2 0,2 0,12 0,1 0,12 0,1 0,1 0,1 0,12 0,12 0,7 0,0159 0,0795 0,0159 0,42 6,3 1,2 2,4 0,1215 0,476 1 1 6 2,856 0,02 1,04 1,56 |
L=ålI =26,51*10-6
Таблица 2.6.3. Плата питания ИМ
| Наименование и тип элемента |
Обозначение по чертежу |
Количество Ni |
Интенсивность отказа при номинальном режиме l0 i *10-6 1/ч |
Режим работы |
Поправочный Коэффициент Аi |
Интенсивность отказов i-го элемента Аi * loi * 10-6 , 1/ч |
Интенсивность отказа изделия Из-за элементов i-го типа Ni * Ai * loi * 10-6 , 1/ч |
|
| Коэф-т нагрузки Кн |
Температура рабочая Т,о С |
|||||||
| Микросхемы: КР142ЕН9Е КР142ЕН9Д |
D1 D2 |
1 1 |
0,1 0,1 |
0,5 0,5 |
40 40 |
1 1 |
0,1 0,1 |
0,1 0,1 |
| Резисторы: С5–16МВ-5Вт – 5,1 Ом±1% С5–16МВ-2Вт – 0,1 Ом±1% С5–33Н – 0,5–3,0 кОм±5%-А-Д |
R1 , R2 , R3 , R4 R5 , R6 |
2 2 2 |
0,04 0,04 0,04 |
0,5 0,5 0,5 |
40 40 40 |
0,1 0,1 0,1 |
0,004 0,004 0,004 |
0,008 0,008 0,008 |
| Конденсаторы: К50–24–63В-2200 мкФ±80 К73–11–250В – 0,33 мкФ±10% К50–24–63В-100 мкФ |
С1 , С2 С3 , С4 С5 , С6 |
2 2 2 |
0,135 0,035 0,135 |
0,9 0,9 0,9 |
40 40 40 |
0,9 0,9 0,9 |
0,1215 0,0315 0,1215 |
0,243 0,063 0,243 |
| Диод полупроводниковый КД227А Транзистор КТ818В Светодиод АЛ307КМ Вилка СНП58–64/94х-9В-23–2–0 Пайка Провода |
V1 …V8 V9 …V12 V13, V14 X1 , X2 |
8 4 2 2 64 31 |
0,2 0,5 0,2 0.01 0,004 0,015 |
0,8 0,8 0,8 1 1 1 |
40 40 40 40 |
1,19 0,9 1,19 1 1 1 |
0.238 0,45 0,238 0,01 0,004 0,015 |
1,904 1,8 0,476 0,02 0,256 0,465 |
L=ålI =2,773*10-6
Таблица 2.6.4. ПЛАТА ПИТАНИЯ МС
| Наименование и тип элемента |
Обозначение по чертежу |
Количество Ni |
Интенсивность отказа при номинальном режиме l0 i *10-6 1/ч |
Режим работы |
Поправочный Коэффициент Аi |
Интенсивность отказов i-го элемента Аi * loi * 10-6 , 1/ч |
Интенсивность отказа изделия Из-за элементов i-го типа Ni * Ai * loi * 10-6 , 1/ч |
|
| Коэф-т нагрузки Кн |
Температура рабочая Т,о С |
|||||||
| Микросхемы: КР142ЕН8Е КР142ЕН8Д КР142ЕН5А |
D1 , D3 D2 , D5 D4 |
2 1 1 |
0,1 0,1 0,1 |
0,5 0,5 0,5 |
40 |
1 |
0,01 |
0,02 0,01 0,01 |
| Резисторы: С2–33Н – 0,125–3 кОм±5%-А-Д С2–33Н – 0,125–820Ом±5%-А-Д С2–33Н – 0,125–3,9кОм±5%-А-Д С2–33Н – 0,125–10кОм±5%-А-Д С2–33Н – 0,125–75кОм±5%-А-Д С2–33Н – 0,125–4,7кОм±5%-А-Д С2–33Н – 0,125–3,3 кОм±5%-А-Д С2–33Н – 0,125–330Ом±5%-А-Д С2–33Н – 0,25–160 кОм±5%-А-Д С2–33Н – 0,25–8,2 кОм±5%-А-Д С2–33Н – 0,5–510 Ом±5%-А-Д С2–33Н – 0,25–560Ом±5%-А-Д С2–33Н – 0,25–240 кОм±5%-А-Д С2–33Н – 0,5–2 Ом±5%-А-Д СП5–22В-1Вт – 1,5 кОм±10% СП5–22В-1Вт-10 кОм±10% СП5–22В-1Вт – 1,0 кОм±10% Диоды: Полупроводниковый КД227А Полупроводниковый КД209А Транзистор КТ818Б Светодиод АЛ307КМ Пайка Провода |
R1 , R2 , R9 , R10 R3 , R19 , R29 …R31 , R33 , R34 , R36 , R42 , R46 , R53 …R55 R4 , R5 R6 , R8 R11 , R12 R13 ..R15 , R17 , R18 , R28 , R77 …R82 R20 R21 …R26 , R47 …R52 R37 R38 R39 R65 …R70 R71 …R76 R82 …R88 R7 R5 , R16 , R35 , R40 , R41 R27 V1 …V4 V5 …V16 V17 , V18 V19 …V23 |
4 13 2 2 2 12 1 12 1 1 1 5 5 7 1 5 1 4 12 2 5 93 46 |
0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,053 0,053 0,053 0,2 0,2 0,5 0,2 0,004 0,015 |
0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,8 0,8 0,8 0,8 1 1 |
40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 40 |
2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 0,3 0,3 0,3 1,19 1,19 0,9 1,19 1 1 |
0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,0159 0,0159 0,0159 0,238 0,238 0,45 0,238 0,004 0,015 |
0,4 1,3 0,2 0,2 0,2 1,2 0,1 1,2 0,1 0,1 0,1 0,5 0,5 0,7 0,0159 0,0795 0,0159 0,952 2,856 0,9 1,19 0,372 0,69 |
L=ålI =15,7857*10-6
Таблица 2.6.5. Плата управления индикацией
| Наименование и тип элемента |
Обозначение по чертежу |
Количество Ni |
Интенсивность отказа при номинальном режиме l0 i *10-6 1/ч |
Режим работы |
Поправочный Коэффициент Аi |
Интенсивность отказов i-го элемента Аi * loi * 10-6 , 1/ч |
Интенсивность отказа изделия Из-за элементов i-го типа Ni * Ai * loi * 10-6 , 1/ч |
|
| Коэф-т нагрузки Кн |
Температура рабочая Т,о С |
|||||||
| Микросхемы: К555ЛН1 К555ЛН2 К155ИД10 |
D1 , D3, D5 … D7 D2 D4 |
5 1 1 |
0,1 0,1 0,1 |
0,5 0,5 0,5 |
40 |
1 |
0,1 |
0,5 0,1 0,1 |
| Резисторы: С2–33Н – 0,25–1,6 кОм±5%-А-Д С2–33Н – 0,25–2,2 кОм±5%-А-Д С2–33Н – 0,25–1,3 кОм±5%-А-Д С2–33Н – 0,25–560 кОм±5%-А-Д С2–33Н-2–300 Ом±5%-А-Д С2–33Н – 0,25–5,1 кОм±5%-А-Д С2–33Н – 0,25–270 Ом±5%-А-Д С2–33Н – 0,25–470 кОм±5%-А-Д С2–33Н – 0,25–220 кОм±5%-А-Д С2–33Н – 0,25–1,2 кОм±5%-А-Д С2–33Н – 0,25–300Ом±5%-А-Д С2–33Н – 0,25–4,7 кОм±5%-А-Д С2–33Н – 0,25–3,0 кОм±5%-А-Д С2–33Н – 0,25–240 кОм±5%-А-Д |
R1 R2 R3 R4 , R59 R5 , R60 R6 …R13 R14 R15 …R17 R18 …R24 , R39 …R42 , R47 …R50 R43 …R46 R25 …R31 R51 …R54 R32 …R38 R55 …R58 R74 …R84 R61 …R71 R72 , R73 |
1 1 1 2 2 8 1 3 15 4 11 22 11 2 |
0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 0,04 |
0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 0,5 |
40 40 40 40 40 40 40 40 40 40 40 40 40 40 |
2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 2,5 |
0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 |
0,1 0,1 0,1 0,2 0,2 0,8 0,1 0,3 1,5 0,4 1,1 2,2 1,1 0,2 |
| Конденсаторы: К53–14–32В – 15,0 мкФ±30% К73–11а-250В – 10,33 мкФ±10% К73–11а-630В – 0,022 мкФ±10% К73–11а-250В – 1,0 мкФ±10% КМ-5б-Н90–0.1 мкФ±10% |
С1 С2 , С3 С4 , С5 С6 С7 …С13 |
1 2 2 1 7 |
0,6 0,035 0,035 0,035 0,6 |
0,56 0,9 0,9 0,9 0,9 |
40 40 40 40 |
2 0,9 0,9 0,9 0,7 |
1,2 0,0315 0,0315 0,0315 0,42 |
1,2 0,063 0,063 0,0315 2,94 |
| Трансформатор Транзистор КТ819В Транзистор КТ605ЕМ Диод полупроводниковый КД424А Вилка СНП58–64/94х9В-23–2-Вилка Онп-ВС-39–16/40,5х62-В53 Пайка Провода |
T1 V1 , V2 V12 …V37 V4 …V8 X1 , X2 X3 , X4 |
1 2 26 5 2 2 184 130 |
0,025 0,56 0,5 0,2 0,01 0,01 0,004 0,015 |
1 0,8 0,8 0,8 1 1 1 1 |
40 40 40 40 40 40 |
5,2 0,9 0,9 1,19 1 1 1 1 |
0,13 0,504 0.504 0,238 0,01 0,01 0,004 0,015 |
0,13 1,008 13,1 1,19 0,02 0,02 0,736 1,95 |
L=ålI =28,1*10-6
3. Технологическая часть
3.1 Разработка методики испытания микроконтроллера
3.1.1 Назначение и состав устройства для испытания
Устройство предназначено для статической и динамической проверки электрических плат построенных и разработанных для микропроцессорных систем.
Устройство состоит из корпуса, дна и крышки. На крышке расположена панель управления. На панели управления расположены светодиоды и органы управления.
В состав устройства входят три блока: блок ручного управления, блок индикации и блок формирования сигналов.
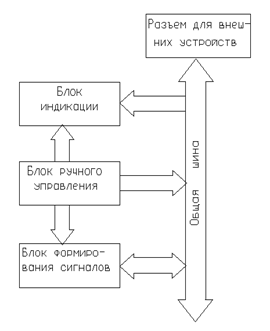
Рисунок 3.1 Блок-схема устройства для испытания
Блок ручного управления состоит из набора переключателей и кнопок, служащих для задачи дискретных сигналов на шине адреса и шине данных для подачи некоторых дискретных сигналов.
Блок индикации и блок формирования сигналов представляют собой печатные платы, которые закреплены на крышке при помощи стоек. На печатных платах установлены электронные компоненты, кнопки, переключатели и соединитель типа СНП 58–84/95x9Р-20–2-В, предназначенный для подключения тестируемых устройств.
Блок индикации представляет собой набор дискретных светодиодов. Он служит для отображения информации на шине адреса, шине данных и для отображения слово состояния микропроцессора.
Блок формирования сигналов служит для формирования сигнала записи и чтения и готовности общей шины.
Технические характеристики:
Среднее потребление находится в пределах 2,5 Вт
Питание блока осуществляется стабилизированным напряжением +5В
Габаритные размеры 182х296х76
3.2 Описание электрической схемы
В состав блока индикации входят регистр защелка и буферное устройство.
Регистр защелка реализован на триггерах D11, D12 и светодиодах VD1-VD8. Он служит для отображения слово состояния основного микропроцессора испытуемой платы.
Буферное устройство реализовано на микропроцессорах D13, D16 и светодиодах VD9-VD32. Оно служит для отображения состояния сигнала, наличия уровня логической «1» или логического «0» на шине адреса и шине данных.
Блок формирования сигналов реализован на триггерах D10, D19, D20, цифровых компараторах D3 – D6 и шинных формирователях D1, D2, D7, D8, D17, D18. Триггеры служат для формирования сигнала записи и чтения и готовности общей шины. Цифровые компараторы служат для сравнения цифровой комбинации заданной ручным управлением и сигналов на шине адреса. Шинные формирователи служат для переключения направления выдачи сигналов от переключателей на шине адреса и шине данных.
Блок ручного управления состоит из набора кнопок и переключателей.
Переключатели S16 – S31 служат для задания адреса на общей шине. Переключатели S8 – S15 служат для задачи данных (логических уровней сигналов данных) на шине данных.
Кнопка S4 служит для формирования сигнала «Cинхронизация».
Тумблеры S5 и S6 предназначены для переключения режимов записи и чтения.
Кнопка S7 служит для формирования импульса для пошагового управления.
Тумблер S3 служит для формирования сигнала готовности
![]()
Распайка соединителей пульта
3.3 Методика испытания устройства для испытания
Данное устройство может работать в двух режимах: статическом и динамическом.
3.3.1 Работа в динамическом режиме:
Для проверки функционирования дискретных выходов на сопроцессоре I8025 соединяем элементы испытания по схеме 3.3.1.
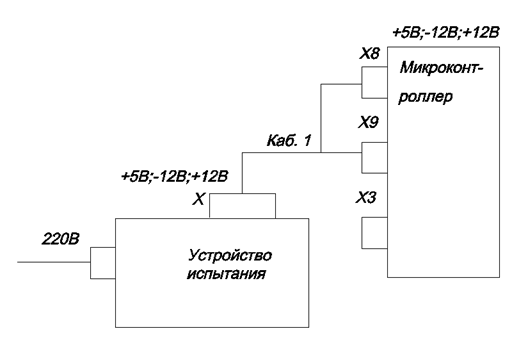
Схема соединения 3.3.1
В разъем Х10 вставляем ПЗУ1 с тестовой программой. Кнопка «Реж.» на устройстве испытания находится в отжатом состоянии. Это означает, что переключатели шины адреса «ПКША» и шины данных «ПКШД» отключены от шины адреса и шины данных соответственно.
После соединения устройства испытания с микроконтроллером по данной схеме включаем устройство в сеть. Затем переключаем тумблер в положение «Вкл.» В результате чего загораются три светодиода «+5В», «+12В», «-12В». Это означает что, стоящий в устройстве испытания блок питания преобразовал питание сети в +5В, +12В и –12В. При подаче напряжения сопроцессор I8025А микроконтроллера начинает работать по тестовой программе записанной в ПЗУ1. На индикаторах «ША» и «ШД», расположенных на устройстве испытания мы видим прохождение теста «Бегущая единица», т.е. последовательное загорание светодиодов от 0 до 15 на «ША», а затем светодиодов от 0 до 7 на «ШД». Следующий тест, который автоматически следует за первым, называется «Бегущий ноль», т.е. все светодиоды «ША» и светодиоды «ШД» горят, а затем поочередно начинают гаснуть. Прохождение тестов «Бегущая единица» и «Бегущий ноль» означает исправную работу сопроцессора I8025А
Для проверки функционирования дискретных выходов на микропроцессоре I8255А и правильности функционирования элементов микроконтроллера: I8080A, I8251A, I8253A соединяем элементы испытания по схеме 3.3.2.
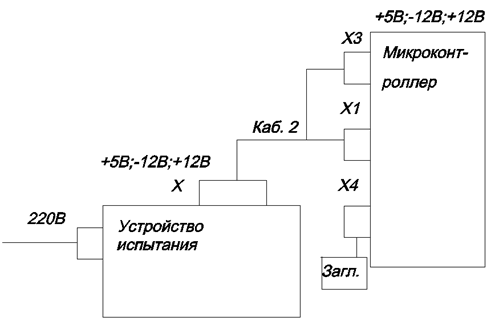
Схема соединения 3.3.2
В разъем Х.5 вставляем постоянное запоминающее устройство ПЗУ1 с тестовой программой. Кнопка «Реж.» на устройстве испытания находится в отжатом состоянии. Далее, после подачи напряжения мы наблюдаем прохождение тестов «Бегущая единица» и «Бегущий ноль», как и в первом случае
Случай, когда эти тесты не прошли, будет рассмотрен в пункте 3.3.2.
Далее идет проверка I8259; I8253A(1); I8251A; I8253A(2).
В случае правильности прохождения теста загораются все светодиоды на «ША», а светодиоды на «ШД» мигают с интервалом 1 с. В случае ошибки, на светодиодах «ША» выставляется адрес элемента (см. табл. 3.3.1), в котором произошла ошибка, а на «ШД» выставляется код ошибки: 1Н – ошибка записи, 2Н – ошибка чтения.
Таблица 3.3.1
| Наименование элемента |
Адрес элемента |
| I8255A |
1Н |
| I8251A |
2Н |
| I8253A(1) |
4Н |
| I8259 |
8Н |
| I8253A(2) |
10Н |
| I8255A |
11Н |
После того, как произошла ошибка, и было определено где, мы собираем схему 3.3.3.
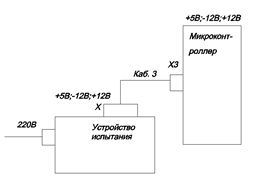
3.3.3 Схема соединения
Кнопка «Реж.» нажата. Это означает, что переключатели «ПКША» и «ПКШД» подключены к шинам. Тумблер «ЗП.» опущен вниз, т.е. установлен режим записи. С помощью переключателей «ПКШД» выставляем слово, которое записывается во внешнее устройство. Далее нажимаем кнопку «Л», которая отключает только переключатели «ПКШД» от шины данных, а тумблер «Чт.» опускаем вниз, т.е. устанавливаем режим чтения. В результате чего на светодиодах «ШД» высвечивается результат чтения.
3.3.2 Статический режим
В том случае если не прошли тесты «Бегущая единица» и «Бегущий ноль» собираем схему 3.3.4.
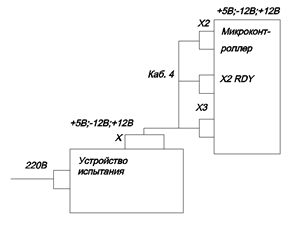
Схема соединения 3.3.4
В этом случае устройство испытания подключается к микропроцессору I8080А микроконтроллера с помощью кабеля с клипсой. При этом нужно отсоединить сигнал RDY (ножка 23) от цепи и присоединить сигнал готовность от устройства испытания через кабель. Переключатели «ПКШД» и «ПКША» нажаты. Тумблеры «Зп.» и «Чт.» подняты, т.е. режимы записи и чтения не используются.
После установки тестового ПЗУ2 и включении питания мы можем контролировать в пошаговом режиме выполнение тестовой программы микропроцессора I8080А. Кнопки «Гт.» и «Синх.» в нажатом положении.
При каждом нажатии кнопки «Ш» (шаг) выполняется один цикл команды. На светодиодах «ША» высвечивается адрес выполняемой команды, а на светодиодах «ШД» высвечивается код выполняемой команды. При этом на светодиодах «СС» (слова состояние) высвечивается код, который соответствует состоянию микропроцессора в данном цикле выполнения команд.
4.1 Экономическое обоснование модернизации блока управления аппарата искусственной вентиляции легких «Спирон – 201)
Целью данного расчета является выявление актуальности и целесообразности изготовления нового вида продукции, расчет выгоды от внедрения его в производство, а также определения преимуществ и возможных недостатков по сравнению с базовым образцом. В задачу расчета входит:
– определение всего объема затрат на изготовление и проектирование нового вида продукции, вычисление ориентировочной цены изделия и сравнение ее с базовой;
– расчет затрат, связанных с эксплуатацией нового оборудования;
– определение условно-годовой экономии.
4.2 Расчет капитальных затрат.
Затраты на разработку и изготовление нового образца изделия и внедрение его в производство определяют по формуле:
Квн =Зпк +Зтех +Зин +Зко +Зис +Зкд, (4.2.1)
где,
Зпк – затраты на проектирование и конструирование нового изделия;
Зин – затраты на изготовление нового изделия;
Зтех – расходы на разработку технологических процессов;
Зко – расходы на конструирование и изготовление техоснастки;
Зис – расходы на испытания;
Зкд – расходы на корректировку технологической документации;
Затраты определим методом прямого счета. Этот метод предполагает подробный расчет всех составляющих затрат на разработку и изготовление нового изделия.
Затраты на конструкторскую разработку. Затраты на проектирование Зпк могут быть определены в соответствии с нормами времени и расценками на все виды проектно-конструкторских работ по формуле:
Зпк =Тк Чс (4.2.2)
где,
Тк – трудоемкость ПКР, чел./ч;
Чс – стоимость одного чел./руб.
Трудоемкость ПКР можно определить по формуле:
Тк =åtk ×A×Kki ×Kri , [чел./ч], (4.2.3)
где,
tk -трудоемкость ПКР на определенный формат чертежа чел./ч
А – число чертежей (листов) соответствующего формата;
Кki, Кri -коэффициенты новизны и сложности.
Таблица 1. Коэффициенты для расчета трудоемкости конструкторских работ
| Формат и характеристика чертежа |
Число Чертежей А |
Трудоемкость tki |
Коэффициент конструктивной сложности Кki |
Коэффициент графической сложности Кri |
||
| А1-микроконтроллер А1 – генератор вдоха |
1 1 |
26,4 33,6 |
1 1,3 |
1,0 1,0 |
||
Тк =26,4×1×1+33,6×1,3×1=70,08 чел./ч
Величина: Чс =125/(24*8)=0,65 руб.
Находим величину затрат на ПКР:
4.2.1 Затраты на материалы и комплектующие изделия
Общая сумма затрат на основные материалы и покупные комплектующие изделия рассчитываются по формуле:
Зм =qзак Цм +Ппи , [руб.] (4.2.4)
где,
qзак - норма расхода соответствующего материала;
Цм – цена 1 кг. данного вида материала, руб.;
Ппи – стоимость покупных изделий, руб.
Расход и стоимость покупных изделий – в таблице 2.
Таблица 2. Расходы на покупные изделия
| № |
Наименование изделия |
Количество |
Цена, руб . |
Общая стоимость, руб. |
Стоимость транспортировки, руб. |
| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 |
Микропроцессоры: I8255A I8253A I8251A I8259 I8080A SN74LS240N SN74LS138N HM6516 I8257 I8243 SN74LS373N I8224 Тахогенератор Скоба Итого |
2 2 1 1 1 1 1 1 1 1 1 1 1 1 |
37 40 120 42 36 25 25 16 36 32 25 34 200 11 |
74 80 120 42 36 25 25 16 36 32 25 34 200 11 756 |
2,22 2,4 3,6 1,26 1,08 0,75 0,75 0,48 1,08 0,96 0,75 1,02 6 0,33 22,68 |
Находим величину затрат на материалы и комплектующие изделия:
Зм =774,68 руб.
Заработная плата основных производственных рабочих
Основная заработная плата рабочих, изготовляющих изделия и узлы, ведущих монтаж и сборку, настройку проектируемого и базового изделий определяется по укрупненным нормативам, исходя из фактических трудовых затрат. Общий размер основной заработной платы определяется по формуле:
Зз =tшт Чс Кт , (5)
где,
tшт - норма времени на операцию;
Чс – часовая ставка первого разряда, руб.;
Кт – тарифный коэффициент соответствующего разряда.
Расчет трудоемкости по деталям приведен в таблице 3.
Таблица 3. Перечень изготавливаемых деталей с операциями обработки
| № |
Изделие и наименование операции |
Разряд работ |
Тарифный коэффициент |
Норма времени |
Заработная плата, руб. |
| 1 |
Общая сборка |
3 |
1,29 |
10 |
17,63 |
| Итого: |
17,63 |
||||
| Цеховые накладные расходы (75%) |
13,22 |
||||
| Общезаводские накладные расходы (150%) |
26,445 |
||||
Себестоимость изделия включает в себя стоимость основного материала и комплектующих изделий, основную заработную плату производственных рабочих и косвенные расходы, приходящиеся на единицу продукции. На основе произведенных выше расчетов составляем калькуляцию себестоимости изделия (Таб. 4)
Таблица 4. Калькуляция затрат на изделие
| Наименование затрат |
Сумма, руб. . |
| ПКР |
45,552 |
| Осн-ые материалы и покупн. идел-ия |
774,68 |
| Основная заработная плата |
17,63 |
| Цеховые расходы |
13,22 |
| Общезаводские расходы |
26,445 |
| Итого: |
877,527 |
| Внепроизводственные расходы составляют 5% от заводской себестоимости изделия: 877,527х 0,05=43,87635 руб.; Полная себестоимость: 877,527+43,87635=921,4 руб. |
|
Плановая прибыль составляет 15% от полной себестоимости проектируемого изделия:
921,4 х 0,15= 138,21 руб.;
Ориентировочная цена проектируемого изделия составляет:
921,4+138,21+108320=109379,61
Полученная цена проектируемой установки К2 = 109379,61 руб. выше стоимости базовой, которая составляет: К1 = 108320 руб. на 1059,61 руб.
Данная модернизация блока управления проводится с целью повышения надежности. В данном случае надежность повысится в 1,5 раза, в результате чего средняя наработка на отказ повышается с 2000 ч. до 3000 ч.
Расчет затрат, связанных с эксплуатацией АИВЛ «Спирон – 201»
Эксплуатационные расходы включают в себя затраты на основные и вспомогательные материалы, заработную плату обслуживающего персонала, затраты на энергию, ремонт изделия, амортизационные отчисления, прочие расходы.
1) Заработная плата дежурного оператора определяется по формуле:
Зп =Зо +Зд +Нч , (6)
где,
Зо – основная зарплата;
Зд – дополнительная зарплата (30% от Зо )
Нч – начисления соцстраху (39% от суммы Зо и Зд ).
а) основная зарплата дежурного оператора определяется по формуле:
Зо =Кт *Чтс *Фдр *Ко *m (7)
где,
Чтс – часовая тарифная ставка первого разряда;
Кт – тарифный коэффициент соответствующего разряда;
Фдр – действительный годовой фонд времени одного рабочего;
Ко – коэффициент учета нормы обслуживания;
m – количество смен;
Фдр =(Дг -Дн )*tс =(260–27)*8=1864 часов
Проектируемое изделие:
Чс =1,367; Фдр =1864;
Ко =0,4; m=3; Кт =1,33;
Зо =1,367*1,33*1864*0,4*3*1=4066,74 руб.
б) находим величину дополнительной зарплаты:
Зд =4066,74*30%=1220,02 руб.
в) находим величину начислений соцстраху:
Нч =(4066,74+1220,02)*39%=2060,83 руб.
Находим величину заработной платы дежурного оператора:
Зп =4066,74+1220,02+2061,83=7348,59 руб.
2) Затраты на энергию определяются по формуле:
Зэ =(Nq Кw Сэ /60К) Фдо , (8)
где,
Nq – установленная мощность, кВт;
К – коэффициент использования по времени;
Сэ – стоимость 1 кВт/ч;
Фдо – действительный фонд времени работы техники;
Кw – коэффициент использования мощности;
Фдо =Дг * m * tс * r =260 * 3*8*0,95=5928 час
где
r=0,95 – коэффициент учитывающий время пребывания оборудования в ремонте;
Зэ =(5×0,9×0,3/60×1) 5928=133,38 руб.
3) Затраты на ремонт составляют 5% от цены изделия:
Проектируемой – 109379,61×5%=5469 руб.,
базовой – 108320×5%=5416 руб.
4) Величина амортизационных отчислений составляет 15% от стоимости изделия:
Проектируемая – За =109379,61×15%=16407 руб.
Базовая – Заб =108320×15%=16248 руб.
5) Прочие расходы определяются по формуле:
Зпр =Зозп *(d/100), (9)
где,
Зозп - размер основной зарплаты;
d-процент прочих расходов.
Зпр =4066,82*(10/100)=406,68 руб.
Результаты, приведенных выше расчетов эксплутационных расходов по базовой и новой установкам, занесены в таблицу 7.
Таблица 7. Калькуляция затрат, связанных с эксплуатацией
| Наименование затрат |
Сумма, руб. Базовое Проектируемое |
|
| З/п дежурного оператора |
7348,59 |
7348,59 |
| Затраты на энергию |
133,38 |
133,38 |
| Затраты на ремонт |
5416 |
5469 |
| Величина амортизационных отчислений |
16248 |
16407 |
| Прочие расходы |
406,68 |
406,68 |
| ИТОГО |
29552,65 |
29764,65 |
4.3.2 Расчет экономической эффективности АИВЛ «Спирон – 201»
Т.к. в данной модернизации имеются дополнительный капитальные затраты, определяется срок окупаемости их по следующей формуле.
Ток =(К2 -К1 )/(С1 -С2 ),
Где К1 и К2 – соответственно капитальные вложения до и после внедрения новой техники
С1 и С2 - годовая себестоимость работы, до и после внедрения новой техники.
Ток =1,2 года
Расчет прибыли от производства модернизированной продукции
![]()
5. Безопасность разрабатываемого устройства
5.1 Анализ опасных вредных факторов АИВЛ (Спирон – 201)
Современная передовая техника неразрывно связана с электричеством. В последние годы созданы новые электроаппараты для медицины, целые диагностические и терапевтические комплексы, различные терапевтические материалы. Нарушение правил техники безопасности, недостаточная культура обслуживания могут вызвать поражение людей электрическим током.
Важным фактором безопасности в аппарате ИВЛ «Спирон-201», на который необходимо обратить внимание, является электробезопасность. Напряжения, применяемые в аппарате составляют от 10 до 220 В, поэтому есть реальная угроза получения электротравмы. Электротравмы возникают при прохождении электрического тока через тело человека или попадении последнего в сферу электрической дуги.
Практически условиями возникновения электротравм являются: прикосновение к токоведущим частям, находящимся под напряжением (например, случайное или намеренное прикосновение к оголенным проводам, зажимам, токоведущим частям электромашин, ламповых патронов); прикосновение к конструктивным частям электросети и оборудования, оказавшимся под напряжением при повреждении изоляции (например, прикосновение к корпусу электродвигателя, имеющего замыкание на корпус); нахождение вблизи места замыкания на землю; прикосновение к металлическим частям аппарата, случайно оказавшимся под напряжением; короткое замыкание.
Степень опасности и возможность поражения электрическим током при соприкосновении с токоведущими частями, находящимися под напряжением, зависят от того, каким образом произошло включение человека под напряжение. Необходимо заметить, что даже напряжения в 36 В и менее могут вызвать смертельный исход в особых ситуациях. Причиной поражения в данном случае – возникновение электрической цепи через акупунктурные зоны. Известно, что акупунктурные точки являются своеобразной системой автоматического регулирования человека. Каждая отвечает за определенный физиологический процесс.
Акупунктурная зона на ладонях воздействует на функции дыхания, поэтому при поражении этой зоны у медсестры даже при небольшом напряжении возможна остановка дыхания.
5.2 Последствия воздействия вредных факторов на человека и окружающую среду
Действие электрического тока на человека сложно и многообразно: оно может быть термическим (ожог), механическим (разрыв тканей и костей), химическим (электролиз). Но самое главное – ток действует биологически, нарушая те процессы, с которыми связана жизнеспособность живой материи. В мышечной ткани, особенно при сокращении сердечной мышцы, в тканях центральной и периферической нервной системы и в других тканях возникают биотоки. При электропоражениях, когда электрические токи из приборов проникают в организм, нарушается биологическое равновесие и возникают патологические явления, приводящие к различным исходам.
Прохождение электрического тока через биологические ткани вызывает ионизацию их атомов, изменяет мембранный потенциал клеток и самих тканей. Это приводит к изменениям в силе и напряжении биотоков; нарушается нормальное функционирование тканей, возникает либо возбуждение, либо торможение центральной нервной системы.
Таким образом, развитие электротравмы возможно не только по причине ионизации атомов и молекул тканей от прохождения электрических токов, но и от изменения потенциалов клеток тканей органов. Биологическим следствием этого являются нарушения в обмене веществ, могущие привести к летальному исходу.
Помимо этого, в результате теплового, химического и физического действия тока в организме происходят одновременно физико-химические процессы, например, образование «костных буч», разрыва тканей, костей, электролиз и т.д. При контактных электротравмах поражается весь организм.
В зависимости от патологических процессов, возникающих при поражениях электрическим током, согласно предположению академика Г.А. Френкеля, принята следующая классификация электротравм по степени их тяжести: элетротравмы I степени – наличие судорожного сокращения мышц без потери сознания; электротравмы II степени – судорожное сокращение мышц и потеря сознания; электротравмы III степени – потеря сознания и нарушение функций сердечной деятельности или дыхания (возможно и то и другое); электротравмы IV степени – клиническая смерть.
Контактные ожоги развиваются в результате комплексного электрического и термического воздействия тока и вызывают глубокие патологические изменения в сосудах, нервах, ионизированных тканях.
Различают четыре степени электрических ожогов: I степень – покраснение кожи; II степень – образование пузырей; III степень – обугливание кожи; IV степень – обугливание подкожной клетчатки, мышц, сосудов, нервов.
Безболезненность контактных ожогов обусловлена поражением самих нервов. Контактные ожоги при напряжении выше 1000 В обычно бывают III и IV степени. При напряжении 127 В ожоги отмечаются у 45% пострадавших; при 65 В ожогов не наблюдается.
Также проявляются так называемые «местные травмы», к которым обычно относят знаки тока, металлизацию и некоторые другие травмы неэлектрического происхождения. Под знаком тока понимают такие ожоги, которые локализуются в поверхностных слоях кожи (эпидермиса). Однако, эти ожоги нельзя отождествлять с термическими ожогами I и II степени, так как при электрических ожогах образование тепла происходит в самих тканях, а при термических – тепло действует извне.
Электрические знаки возникают при хорошем контакте. По внешнему виду они являются поражением круглой или эллиптической формы серого или бело-желтоватого цвета с резко очерченными краями. Размеры их не более 5 мм. В некоторых случаях электрические знаки, имеющие значительные размеры, представляют собой форму или отпечаток той части установки, с которой произошло соприкосновение. Иногда эти знаки появляются спустя некоторое время. Как характерную особенность следует отметить их безболезненность и отсутствие вокруг них воспалительных процессов и нагноения.
Специфическим видом электротравм является металлизация кожи, – так называемое пропитывание кожи мельчайшими частицами металла, разрушающегося и проникающего в кожу на месте контакта под влиянием механического или химического воздействия тока. При возникновении дуги металл токоведущей части, где возникла дуга, испаряясь, механически заносится в глубь кожи и осаждается в ней, придавая коже своеобразную окраску. Металлизация возможна также и при плотном соприкосновении кожи к токоведущей части без образования электрической дуги вследствие электролитического действия тока, когда последний, разлагая жидкость органических тканей, создает в ней основные и кислотные ионы. В большинстве случаев металлизированная кожа сходит, и не остается никаких следов.
Поражающее действие электрического тока зависит от следующих факторов: значения и длительности протекания тока через тело человека, рода и частоты тока, индивидуальных свойств человека.
Сопротивление тела человека принимается равным 1000 Ом. Человек начинает ощущать ток величиной 0,6–1,5 мА. Сопротивление тела человека резко падает в зависимости от времени воздействия. Наиболее опасным является переменный ток с частотой 20–100 Гц.
5.3 Разработка мероприятий, направленных на уменьшение воздействия опасных факторов
Основные мероприятия, обеспечивающие электробезопасность, могут быть следующими.
Электрические сети, установки, оборудование должны быть выполнены так, чтобы токоведущие части их, находящиеся под напряжением, были недоступны для случайного прикосновения.
Недоступность токоведущих частей достигается или надлежащей их изоляцией, применением различных защитных кожухов; или расположение токоведущей части на недоступной высоте в тех случаях, когда нельзя использовать изоляцию.
Выбор средств для предупреждения случайного прикосновения к токоведущим частям производится с учетом местных условий.
Для защиты от опасности поражения электрическим током в случае перехода напряжения на металлические конструктивные части электрических частей, установок и оборудования используют специальные устройства – защитное заземление и защитное отключение. При помощи этих устройств возникающие на конструктивных частях напряжения снижаются до безопасной для человека величины или автоматически отключается оборудование.
Звуковая и световая сигнализация, применяемая во многих случаях одновременно, служит эффективным средством предотвращения электротравматизма.
Степень опасности и вероятность поражения электрическим током в значительной мере зависят также от режима нейтрали сети. Двухфазное включение человека в 3-х фазную сеть представляет опасность с летальным исходом независимо от режима нейтрали. А при однофазном включении человека в сеть нейтраль играет решающее значение.
Исключительно важное значение для безопасной, безаварийной и экономичной работы электрооборудования имеет исправное состояние изоляции. Только исправная изоляция выполняет свою защитную функцию от чрезмерных токов утечки, от возможности поражения током, от коротких замыканий и связанных с ним пожаров.
Заключение
В данном дипломном проекте была проведена модернизация блока управления аппарата искусственной вентиляции легких «Спирон-201» с целью повышения надежности. Для этого отечественные микросхемы, входящие в состав микроконтроллера были заменены на их зарубежные аналоги. В результате этого повысилась вероятность безотказной работы блока управления, а так же повысилась средняя наработка на отказ в 5 раз. Так же для повышения надежности был экранирован блок печатных плат, входящий в блок управления. А в расчетно–конструкторской части была рассчитана толщина экрана D=0,3 мм.
В блоке генератора вдоха на выходном валу асинхронного двигателя был установлен тахогенератор и в расчетно-конструкторской части было проведено моделирование полученной следящей системы. В результате моделирования было установлено, что тахогенератора устраняет колебания и улучшает параметры переходного процесса.
Так же в расчетно-конструкторской части дипломного проекта был проведен расчет основных параметров следящей системы и расчет основных параметров электродвигателя.
Список используемой литературы
1. Паспорт на аппарат искусственной вентиляции легких «Спирон – 201» №-706 Т А2.832.040 ПС.КХ 1992 г.
2. Половко А.М., Маликов И.М. «Сборник задач по теории надежности»; М:1974
3. Голинкевич Т.А. «Прикладная теория надежности», М: 1980
4. Никулин С.М. «Надежность элементов РЭА», М: 1979
5. http:www.elstandart. spb.ru (rus/dest/dest_3_1_4_1.html).
6. MIL – HDBK – 217 F
7. «Несущие конструкции РЭА»/Под ред. Овсищер П.И., Голованов Ю.В., Ковешников В.П. и др. – М.:Радио и свяхь, 1988
8. «Конструирование приборов» /Под ред. В. Краузе. Пер. с нем. В.Н. Пальянова; – Кн.1 – М.:Машиностроение, 1987
9. Буловский П.И., Зайндберг М.Г. «Надежность приборов систем управления». Справочное пособие. Л., «Машиностроение», 1975
10. Н.П. Ермолин «Электрические машины малой мощности», издательство «Высшая школа», М, 1967
11. Справочник по электрическим машинам. В двух томах./ Под общей редакцией И.П. Копылова, Б.К. Клокова – М., Энергоатомиздат, 1989
12. К.Я. Стародуб, Н.Н. Михайлов «Синхронные передачи и следящие системы», М., «Машиностроение», 1971
13. Н.Н. Щелкунов, А.П. Дианов «Микропроцессорные средства и системы», М.: Радио и связь, 1989
14. ГОСТ Р 50444–92 «Приборы, аппараты и оборудования медицинские».
15. ГОСТ Р 50267.04–99. «Изделия медицинские электрические ч. 1. Общие требования безопасности. Требования к программируемым медиинским электронным системам.
16. Коршунов Ф.П., Богатырев Ю.А., Вавилов В.Л. Воздействия радиации на интегральные микросхемы. – М., наука и техника, 1986
17. Гальперин Ю.С. О применении международных стандартов в практике разработки АИВЛ. // Мед. Техника. – .М. Медицина –1000 – №3. - с. 8–10.
18. Всеволод Бурцев Возможности использования зарубежной элементной базы. // Живая электроника России 2002. – М., 2002 – №4 – с. 33 – 36.