| Скачать .docx |
Дипломная работа: Частотно-модульовані сигнали
1. ХАРАКТЕРИСТИКА ЧАСТОТНО МОДУЛЬОВАНИХ СИГНАЛІВ
1.1 Параметри частотно модульованих сигналів (девіація, коефіцієнт модуляції)
Загальний принцип частотної і фазової модуляції
Несуче коливання ![]() характеризується значенням своїх параметрів – амплітуди, кругової частоти
характеризується значенням своїх параметрів – амплітуди, кругової частоти ![]() і початкової фази
і початкової фази ![]() . Модуляція виражається в зміні за законом первинного сигналу с
(t
) значень одного чи декількох параметрів коливання
. Модуляція виражається в зміні за законом первинного сигналу с
(t
) значень одного чи декількох параметрів коливання ![]() , що перепишемо у вигляді [1]:
, що перепишемо у вигляді [1]:
![]() ,(1.1)
,(1.1)
де ![]() – повна фаза гармонійного коливання.
– повна фаза гармонійного коливання.
Зміна кругової частоти чи початкової фази приводиться в остаточному підсумку до зміни повної фази (миттєвого кута) коливання (1.1). На цій підставі спосіб, заснований на зміні під впливом первинного сигналу с
(t
) чи частоти, чи початкової фази коливання носить назву кутова модуляція. З цього також випливає, що кутова модуляція, по-своєму способу здійснення, поділяється на частотну і фазову. Структурна схема каналів зв’язку з частотною модуляцією (ЧМ) зображена рис. 1.1 [1], де ![]() та сигнали з частотною модуляцією відповідно.
та сигнали з частотною модуляцією відповідно.

Рисунок 1.1 – Структурна схема каналу зв’язку з ЧМ
Одержимо аналітичні вирази для сигналів з ЧМ.
Загальне вираження сигналу з кутовою модуляцією має вигляд [1]:
![]() ,(1.2)
,(1.2)
де повна фаза ![]() .
.
При частотній модуляції змінюється частота модульованого коливання за законом [5]:
![]()
![]() ,(1.3)
,(1.3)
де ![]() – максимальне відхилення частоти від номінального значення частоти, що називається девіацією частоти; значення 2
– максимальне відхилення частоти від номінального значення частоти, що називається девіацією частоти; значення 2![]() іноді називають смугою коливання частоти.
іноді називають смугою коливання частоти.
Як відомо, зміна частоти ![]() викликає зміну початкової фази, пропорційної інтегралу від
викликає зміну початкової фази, пропорційної інтегралу від ![]() [1]:
[1]:
![]() .(1.4)
.(1.4)
У свою чергу миттєва частота коливання змінюється за законом похідної від зміни фази [1]:
 .(1.5)
.(1.5)
Таким чином, при зміні частоти за законом (1.3) повна фаза модульованого коливання дорівнює [1]:
![]() .(1.6)
.(1.6)
І модульоване по частоті коливання одержує вид [1]:
![]() .(1.7)
.(1.7)
Коливання частотною модуляцією можна представити загальною формулою коливань з кутовою модуляцією [1]:
![]() ,(1.8)
,(1.8)
де ![]() – при частотній модуляції.(1.9)
– при частотній модуляції.(1.9)
Частотна модуляція
Сигнал з частотною модуляцією відноситься до інтегрованих систем модуляції і виражається [1]
![]()
![]() .(1.10)
.(1.10)
Шляхом звичайних перетворень отримаємо [1]:
![]() ;(1.11)
;(1.11)
![]() ;
;
![]() .(1.12)
.(1.12)
Спектральна щільність і середня потужність перешкоди на виході ідеального приймача сигналів ЧМ виражаються, таким чином [1]:
![]() ;(1.13)
;(1.13)
ε2
=![]() ;(1.14)
;(1.14)
Отже, перевищення сигналу над перешкодою на виході ідеального приймача сигналів ЧМ дорівнює [1]:
![]() .(1.15)
.(1.15)
Середня потужність сигналу ЧМ дорівнює ![]() .
.
При цьому узагальнений виграш дорівнює [1]
![]()
(1.16)
![]() (1.17)
(1.17)
1.2 Ширина спектру частотно модульованого коливання в залежності від коефіцієнта модуляції
Перепишемо коливання у вигляді [5]:
![]() ,(1.18)
,(1.18)
при цьому прийнято φ0 =0, від значення якої форма енергетичного спектру не залежить.
Функція автокореляції коливання з кутовою модуляцією дорівнює [5]:
 (1.19)
(1.19)
Позначивши ![]()
Отримаємо [1]:
![]() ,(1.20)
,(1.20)
де ![]() – нормована функції автокореляції
– нормована функції автокореляції ![]() .
.
Таким чином, енергетичний спектр коливання з кутовою модуляцією[5]:
![]() (1.21)
(1.21)
чи
![]() , (1.22)
, (1.22)
де ![]() – енергетичний спектр, що відповідає функції автокореляції
– енергетичний спектр, що відповідає функції автокореляції ![]() .
.
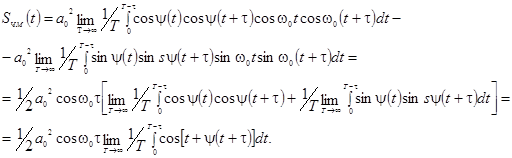
Аналізуючи отримані вирази, легко прийти до висновку про те, що спектр коливання з кутовою модуляцією, так само як спектр сигналу АМ, має дві симетричні щодо середньої частоти ω0 бічні смуги частот (рис. 1.2) [1].
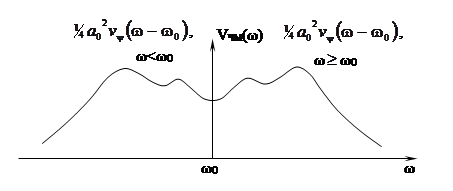
Рисунок 1.2 – Енергетичний спектр сигналу з кутовою модуляцією
Як видно, функція ![]() зв’язана складною залежністю з моделюючою функцією с
(t
). Тому що обчислення спектру коливання з кутовою модуляцією для випадкової моделюючої функції с
(t
) сполучено зі значними математичними труднощами, тому обмежимося дослідженням спектрів сигналів з частотною модуляцією для найпростішої форми первинного сигналу с
(t
)=cosΩt
у вигляді гармонійного низькочастотного коливання (модуляція одним тоном).
зв’язана складною залежністю з моделюючою функцією с
(t
). Тому що обчислення спектру коливання з кутовою модуляцією для випадкової моделюючої функції с
(t
) сполучено зі значними математичними труднощами, тому обмежимося дослідженням спектрів сигналів з частотною модуляцією для найпростішої форми первинного сигналу с
(t
)=cosΩt
у вигляді гармонійного низькочастотного коливання (модуляція одним тоном).
Сигнали з частотною модуляцією одним тоном виражаються формулами [2]:
![]() ,(1.23)
,(1.23)
де ![]() – індекс частотної модуляції.
– індекс частотної модуляції.
Індекс модуляції ![]() має фізичний сенс максимального збільшення початкової фази модульованого коливання. Користуючись співвідношенням з тригонометрії, отримаємо для частотної модуляції [1]:
має фізичний сенс максимального збільшення початкової фази модульованого коливання. Користуючись співвідношенням з тригонометрії, отримаємо для частотної модуляції [1]:
![]() .(1.24)
.(1.24)
Скористаємося співвідношеннями з теорії Бесселевих функцій [1]:
![]() ,(1.25)
,(1.25)
![]() ,(1.26)
,(1.26)
де ![]() – функція Бесселя першого роду n-го порядку від аргументу
– функція Бесселя першого роду n-го порядку від аргументу ![]() .
.
Після підстановки і відповідних елементарних перетворень одержуємо:
![]()
чи
 (1.27)
(1.27)
Тому що
![]() , (1.28)
, (1.28)
де ![]() =3π/2 – постійна початкова фаза.
=3π/2 – постійна початкова фаза.
Для ψm =5 амплітудний спектр сигналу з кутовою модуляцією показаний на рис. 1.3 [1]. Форма спектру коливання з кутовою модуляцією істотно залежить від індексу модуляції ψm .
У загальному випадку спектр коливання з кутовою модуляцією є більш складним, ніж спектр коливання з амплітудною модуляцією, зокрема, теоретично він є необмежено широким.
Рисунок 1.3 – Спектр сигналу з кутовою модуляцією
Однак можна помітити, що складовими спектру з номерами n > ψm через малу їхню інтенсивність можна зневажити. У цьому випадку ширина спектру сигналу з кутовою модуляцією визначається співвідношенням [1]:
![]() ,(1.29)
,(1.29)
де ![]() – частота моделюючого коливання.
– частота моделюючого коливання.
Більш строго ширину спектру коливання з кутовою модуляцією вимірюють (і практично обмежують у каналах зв’язку) як інтервал між верхньою і нижньою бічними частотами (розташованими симетрично щодо середньої частоти ω0 ), амплітуди яких складають визначену частину від максимальної амплітуди коливання на деякій бічній частоті. Номер n бічних граничних частот при цьому визначається з рівності [2]:
![]() .(1.30)
.(1.30)
Оцінкою ширини спектру сигналів з кутовою модуляцією формулою (1.19) можна користуватися при досить великих значеннях індексу модуляції (![]() ).
).
Відповідно до формули (1.19) для сигналів з частотною модуляцією маємо [2]:
![]() ,(1.31)
,(1.31)
де ![]() – максимальне відхилення (девіація) частоти, так як [6]
– максимальне відхилення (девіація) частоти, так як [6]
![]() .(1.32)
.(1.32)
Таким чином, при великих індексах модуляції ширина спектру сигналів із ЧМ дорівнює приблизно подвоєному значенню девіації частоти.
Кутова модуляція з великими індексами (![]() ) називається широкосмуговою.
) називається широкосмуговою.
При малих значеннях індексу модуляції (![]() ) можна скористатися наближеними значеннями тригонометричних функцій:
) можна скористатися наближеними значеннями тригонометричних функцій:
![]() ,
,
![]()
У цьому випадку відповідно до формули (1.17) [1]
![]() . (1.33)
. (1.33)
У розглянутому випадку спектр сигналів з кутовою модуляцією збігається зі спектром сигналу з амплітудною модуляцією. Дійсно, вираз можна привести до вигляду [1]:
![]() .(1.34)
.(1.34)
Якщо прийняти ![]() = m, то
= m, то ![]() .
.
Кутова модуляція з малим індексом модуляції (![]() ) може бути названа вузькосмуговою. Ширина спектру вузько смугових сигналів з кутовою модуляцією визначається наступною наближеною формулою (як і при амплітудній модуляції) [2]:
) може бути названа вузькосмуговою. Ширина спектру вузько смугових сигналів з кутовою модуляцією визначається наступною наближеною формулою (як і при амплітудній модуляції) [2]:
![]() ,(1.35)
,(1.35)
де ![]() – максимальна частота модулюючого сигналу с
(t
).
– максимальна частота модулюючого сигналу с
(t
).
Загальна оцінка методу частотної модуляції
Однією з основних особливостей методу частотної модуляції (у порівнянні з амплітудною) є певне використання потужності передавача, не залежне від структури повідомлення, яке передається (від значення його пік-фактора). У цілому, метод частотної модуляції є більш завадостійким, ніж метод амплітудної модуляції. При достатньому перевищенні сигналу над перешкодою в каналі зв’язку завадостійкість методу частотної модуляції зростає зі збільшенням індексу ![]() частотної модуляції. Ця властивість знаходить безпосередню реалізацію в широкосмугових системах зв’язку з частотною модуляцією.
частотної модуляції. Ця властивість знаходить безпосередню реалізацію в широкосмугових системах зв’язку з частотною модуляцією.
2. ПОРІВНЯЛЬНА ОЦІНКА ЗАВАДОСТІЙКОСТІ ЧМ СИГНАЛІВ ПРИ РІЗНИХ КОЄФІЦІЄНТАХ МОДУЛЯЦІЇ
Мінімально потенційною завадостійкістю володіє метод амплітудної модуляції. Методи балансної й односмугової модуляції забезпечують однаковий узагальнений виграш.
Виграш від застосування методу частотної модуляції пропорційний квадрату індексу (![]() ) частотної модуляції. Але зі збільшенням індексу частотної модуляції росте ширина спектру модульованих сигналів. Отже, підвищення завадостійкості в системах з кутовою (частотною) модуляцією досягається завдяки розширенню їхнього спектру і збільшення, відповідно, смуги частот, яку займає канал зв’язку з розглянутими видами модуляції.
) частотної модуляції. Але зі збільшенням індексу частотної модуляції росте ширина спектру модульованих сигналів. Отже, підвищення завадостійкості в системах з кутовою (частотною) модуляцією досягається завдяки розширенню їхнього спектру і збільшення, відповідно, смуги частот, яку займає канал зв’язку з розглянутими видами модуляції.
Варто звернути увагу також на те, що приведені вище значення узагальнених виграшів, що визначають потенційну завадостійкість каналів зв’язку з розглянутими видами модуляції, є справедливими лише для відносно слабких перешкод, для яких виконується нерівність h 2 >1.
У каналах зв’язку з кутовою модуляцією приведена нерівність може виконуватися лише для визначеної області значень індексів модуляції ![]() <
<![]() , менших деяких критичних значень. При збільшенні значень індексів кутової модуляції і зв’язаним з цим збільшенням ширини спектрів сигналів зменшується перевищення сигналу над перешкодою
, менших деяких критичних значень. При збільшенні значень індексів кутової модуляції і зв’язаним з цим збільшенням ширини спектрів сигналів зменшується перевищення сигналу над перешкодою ![]() на вході демодулятора (детектора), що приводить до придушення сигналу перешкодою і зменшенню відношення сигналу до перешкоди на його виході.
на вході демодулятора (детектора), що приводить до придушення сигналу перешкодою і зменшенню відношення сигналу до перешкоди на його виході.
Сказане ілюструється залежностями, зображеними в дод.Б. При зменшенні відношення потужності сигналу до питомої інтенсивності перешкоди ![]() менше деякого граничного (
менше деякого граничного (![]() )пор
перевищення сигналу над перешкодою на виході приймача сигналів ЧМ (а отже, і його завадостійкості) різко зменшується. Граничне значення відношення (
)пор
перевищення сигналу над перешкодою на виході приймача сигналів ЧМ (а отже, і його завадостійкості) різко зменшується. Граничне значення відношення (![]() )пор
збільшується зі збільшенням індексу модуляції, тому що при великому значенні індексу модуляції (більш широкій смузі частот) перевищення сигналу над перешкодою на вході демодулятора зменшується.
)пор
збільшується зі збільшенням індексу модуляції, тому що при великому значенні індексу модуляції (більш широкій смузі частот) перевищення сигналу над перешкодою на вході демодулятора зменшується.
Наближено граничне значення відношення ![]() можна визначити з умови
можна визначити з умови ![]() , звідки [4]:
, звідки [4]:
![]() ,(2.1)
,(2.1)
де FS – пропорційна індексу модуляції.
З рівності (2.1) можна перейти до безрозмірної величини [4]:
![]() .(2.2)
.(2.2)
Серед розглянутих видів модуляції найбільш широке застосування в практиці радіозв’язку одержали методи амплітудної модуляції (як технічно найбільш прості), одно смугової модуляції (через високу завадостійкість та мінімальну смугу частот, яку займає канал зв’язку) і частотної модуляції з відносно малим індексом модуляції (порядку одиниць), при якому потрібна менша потужність сигналу на вході приймача для забезпечення умови ![]() .
.
Прийом сигналів ЧМ. Структурна схема приймача з частотною модуляцією зображена на рис. 2.1. [1]. Обмежувач призначений для усунення паразитної амплітудної модуляції, викликаною перешкодою.

Рисунок 2.1 – Структурна схема приймача з ЧМ
Запишемо сигнал ЧМ [1]:
![]() ,(2.3)
,(2.3)
де кругова частота ![]() змінюється відповідно до закону модуляції її сигналом х
(t
), і перешкоду [1]:
змінюється відповідно до закону модуляції її сигналом х
(t
), і перешкоду [1]:
![]() .(2.4)
.(2.4)
Для деякого фіксованого моменту часу сигнал і перешкода зображені векторною діаграмою на рис. 2.2 [1]. Як видно, перешкода викликає випадкові зміни як амплітуди, так і початкової фази прийнятого сигналу.
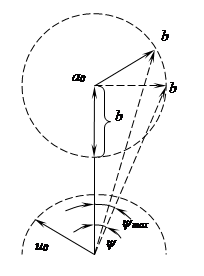
Рисунок 2.2 – Векторна діаграма сигналу ЧМ та перешкоди
Якщо обмежувач має поріг ![]() , то паразитні зміни амплітуди прийнятого коливання Z
(t
) будуть усунуті. Однак викликані перешкодою випадкові відхилення початкової фази сигналу приводять до його перекручувань. Вони створюють так звану паразитну частотну (кутову) модуляцію прийнятого сигналу і відповідний їй шум (перешкоду) на виході частотного детектора.
, то паразитні зміни амплітуди прийнятого коливання Z
(t
) будуть усунуті. Однак викликані перешкодою випадкові відхилення початкової фази сигналу приводять до його перекручувань. Вони створюють так звану паразитну частотну (кутову) модуляцію прийнятого сигналу і відповідний їй шум (перешкоду) на виході частотного детектора.
Максимальне відхилення ![]() початкової фази називають індексом частотної модуляції
початкової фази називають індексом частотної модуляції ![]() , що визначається зі співвідношення [1]:
, що визначається зі співвідношення [1]:
![]() .(2.5)
.(2.5)
При ![]() (слабкі перешкоди) значення синуса можна замінити значенням його аргументу і тоді
(слабкі перешкоди) значення синуса можна замінити значенням його аргументу і тоді ![]() ≈
≈ ![]() .
.
Виділимо (рис. 2.3) [1] елементарну ділянку ![]() у смузі частот ΔF
приймача, що дорівнює ширині спектру прийнятого ЧМ сигналу. Перешкода, діючи в цій смузі частот, викликає максимальне відхилення (девіацію) частоти.
у смузі частот ΔF
приймача, що дорівнює ширині спектру прийнятого ЧМ сигналу. Перешкода, діючи в цій смузі частот, викликає максимальне відхилення (девіацію) частоти.
![]() ,(2.6)
,(2.6)
де ![]() .
.
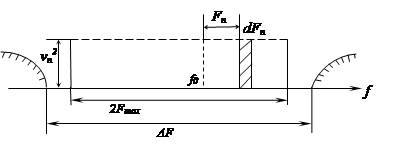
Рисунок 2.3 – Графічне пояснення методу визначення потужності перешкоди на виході ЧМ детектора
Потужність шуму, викликаного елементарною перешкодою на виході частотного детектора, пропорційна квадрату девіації частоти [1]:
![]() (2.7)
(2.7)
(коефіцієнт пропорційності прийнятий рівним одиниці).
Повна потужність перешкоди, що створюється всіма елементарними перешкодами на виході детектора в смузі частот ![]() , дорівнює [4]:
, дорівнює [4]:
![]() .(2.8)
.(2.8)
Потужність сигналу на виході приймача пропорційна квадрату девіації частоти сигналу ЧМ [4]:
![]() .(2.9)
.(2.9)
Таким чином, перевищення сигналу над перешкодою на загальному виході схеми (рис. 2.1) дорівнює [4]:
![]() ,(2.10)
,(2.10)
де ![]() .
.
Зіставляючи отриманий результат з перевищенням сигналу над перешкодою на виході ідеального приймача, переконуємося, що вони збігаються.
Таким чином, при відносно малому рівні перешкод (![]() ) на вході обмежувача і прямокутній формі частотних характеристик ВЧ і НЧ приймач за схемою рис. 2.1 практично цілком реалізує потенційну завадостійкість.
) на вході обмежувача і прямокутній формі частотних характеристик ВЧ і НЧ приймач за схемою рис. 2.1 практично цілком реалізує потенційну завадостійкість.
Однією з найбільш актуальних задач у техніці радіоприйому сигналів ЧМ є боротьба з граничним явищем, що обмежує максимальне значення індексу частотної модуляції.
Рішення цієї задачі повинне зводитися в остаточному підсумку до забезпечення перевищення сигналу над перешкодою на вході частотного детектора вище граничного.
Один із технічних способів рішення цієї задачі полягає в застосування фільтра, що стежить. Схема приймача сигналів ЧМ із застосуванням такого фільтру зображена на рис. 2.4 [1].
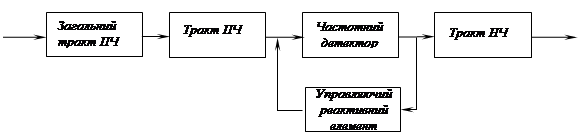
Рисунок 2.4 – Структурна схема приймача із фільтром, що стежить
Миттєві зміни частоти прийнятого ЧМ сигналу викликають пропорційні збільшення напруги на виході частотного детектора. За допомогою реактивного елемента, на який через ланцюг зворотного зв’язку подається напруга з виходу частотного детектора, змінюється настроювання підсилювачів тракту ПЧ відповідно до прийнятого коливання.
Точність спостереження, а отже, і досяжне зменшення смуги пропускання приймача обмежуються наявністю факторів технічного характеру, а також впливом перешкод. При практично реалізованій точності спостереження вдається отримати значення смуги пропускання фільтра, що стежить, ![]() , тобто практично рівне смузі, необхідної для прийому АМ сигналів.
, тобто практично рівне смузі, необхідної для прийому АМ сигналів.
Тому що при ![]() смуга пропускання звичайного приймача
смуга пропускання звичайного приймача ![]() , то можливість звуження смуги пропускання й зменшення граничного перевищення сигналу над перешкодою оцінюється співвідношенням [2]:
, то можливість звуження смуги пропускання й зменшення граничного перевищення сигналу над перешкодою оцінюється співвідношенням [2]:
![]() .(2.11)
.(2.11)
Аналогічній схемі з фільтром, що стежить, є схема, зображена на рис. 2.5 [1], що реалізує метод зворотного зв’язку по частоті.
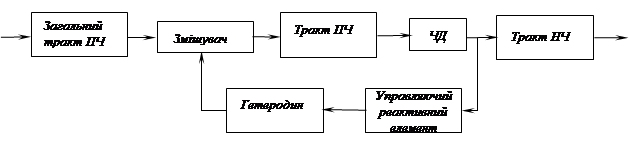
Рисунок 2.5 – Схема прийому сигналів ЧМ зі зворотним зв’язком
На схемі напруга з ЧД через реактивний елемент впливає на частоту приймача і змінює її в тому ж напрямку, в якому змінюється і частота сигналу, чим забезпечується можливість, як і в схемі з фільтром, що стежить, зменшити смугу пропускання тракту ПЧ. Ясно, що застосування фільтра, що стежить, чи методу зворотного зв’язку по частоті може лише наблизити завадостійкість реальних приймачів до потенційного, обумовленого сигналу над перешкодою (1.16), що неможливо перевершити.
2.1 Схеми демодуляторів ЧМ сигналів
Задача частотного детектора (ЧД) складається з того, щоб виробляти напругу, величина якої була б пропорційна зміні частоти модульованого коливання. Безпосереднє здійснення такої операції складне, тому найбільш розповсюджений наступний варіант. Спочатку частотно-модульовані коливання (ЧМ) перетворюються в амплітудно-частотно модульоване коливання (АЧМ), амплітуда якого змінюється пропорційно зміні частот. Потім амплітудно-частотно модульовані коливання піддають детектуванню.
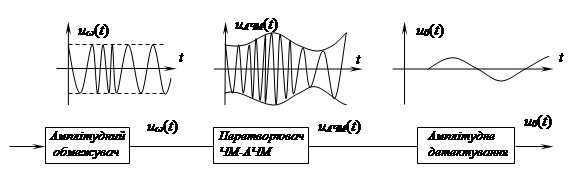
Рисунок 2.6 – Узагальнена структура тракту ЧМ сигналу
Для того, щоб на виході детектора не виникали перекручення за рахунок можливих змін амплітуди вхідної напруги, перед детектуванням проводять обмеження амплітуд. Операції, які виконують при детектування ЧМ коливань, зображені на рис. 2.6 [3].
Залежність напруги на виході детектора u
0
від відхилення частоти вхідного коливання Δf
по відношенню до частоти настройки детектора f
d
називають характеристикою частотного детектора (рис. 2.7) [3]. Частота настройки детектора f
d
повинна бути рівна мінімальному значенню частоти несучого коливання вхідного сигналу f
н
. тоді при подачі на вхід детектора не модульованого сигналу з номінальним значенням частоти напруги на виході детектора буде рівна нулю. Характеристику детектора можна записати також у вигляді ![]() .
.
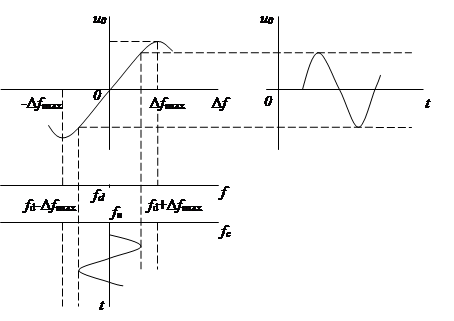
Рисунок 2.7 – Характеристика частотного детектора
Частотний детектор не буде вносити перекручення, якщо його характеристика лінійна в робочому інтервалі частот ![]() . Параметром, який визначає ефективність частотного детектора, є крутизна характеристики
. Параметром, який визначає ефективність частотного детектора, є крутизна характеристики ![]() в межах цього інтервалу [3]:
в межах цього інтервалу [3]:
![]() .(2.12)
.(2.12)
Технічна реалізація частотних детекторів може бути різною.
З одним розстроєним коливальним контуром
У тих випадках, коли не вдається задовольнити умові детектування без обмежень вихідного коливання ![]() , роблять часткове включення навантаження за допомогою дільника (рис. 2.8) [3]. Зі схеми випливають співвідношення:
, роблять часткове включення навантаження за допомогою дільника (рис. 2.8) [3]. Зі схеми випливають співвідношення:
![]()
(2.13)
![]() . (2.14)
. (2.14)
Коефіцієнт включення навантаження р
, записаний без обліку СН
, тому що в більшості випадків ![]() .
.
Якщо величина R
вибрана, а значення m
та R
відомі, можливо за формулою (2.13, 2.14) та граничній умові ![]() визначити k
дел
та р
2
.
визначити k
дел
та р
2
.
Схема з дільником на виході зменшує також проникання високочастотних коливань в навантаженні детектора. Для підсилення цього ефекту паралельно резистору R 2 вмикають додаткову ємність.
Узгодження з попереднім каскадом здійснюється таким чином, щоб детектор не шунтував коливальний контур джерела сигналу. Практично з урахуванням коефіцієнта включення р 1 (рис. 2.7) це означає, що потрібно забезпечити [3]:
![]() ,(2.15)
,(2.15)
де ![]() – резонансний опір коливального контуру при повному включенні.
– резонансний опір коливального контуру при повному включенні.
Вплив шунтуючої дії детектора особливо позначається при детектуванні радіоімпульсів. Перекручування, внесені детектором у цьому випадку, оцінюють тривалістю фронту імпульсу t ф , часом спаду t с і завалом вершини імпульсу ΔU 0 (рис. Д.В.1).
При детектуванні імпульсних коливань звичайно використовують схеми діод них детекторів. Для прискорення перехідних процесів постійна часу інерційного ланцюга RC повинна бути по можливості малою. Тому часто обходяться без спеціального конденсатора С , обмежуючись використанням ємностей монтажу і навантаження.
Однак зменшення ємності С в послідовній схемі діодного детектора приводить до збільшення рівня високочастотних пульсацій. При зменшенні опору R сильніше шунтується коливальний контур попереднього каскаду.
Характер процесу встановлення (попереднього фронту імпульсу) визначається взаємозв’язком параметрів детектора і коливального контуру. На самому початку перехідного процесу напруга на затисках ланцюга RC
близька до нуля, зміщення на діоді практично відсутнє, кут відсікання θ=π/2 та R
вх
d
![]() 2/S. При настільки малому вхідному опорі детектора коливальний контур буде сильно шунтований, добротність його різко погіршена і амплітуда напруги на ньому мала.
2/S. При настільки малому вхідному опорі детектора коливальний контур буде сильно шунтований, добротність його різко погіршена і амплітуда напруги на ньому мала.
В міру наростання негативного зсуву на діоді кут відсічення зменшується, вхідний опір детектора зростає й амплітуда коливань на контурі збільшується. Таким чином, швидкість наростання коливань на контурі (і напруги на виході детектора) залежить одночасно від параметрів контуру і детектора. Детальний аналіз процесу приводить до наступного виразу для розрахунків тривалості фронту імпульсу [3]:
![]() .(2.16)
.(2.16)
Усі величини, що входять до даного виразу, обчислюються стосовно сталого режиму.
Час спаду tc визначається протяжністю розряду конденсатора С через резистор R , тобто постійна часу інерційного кола. При відліку на рівні 0,05U 0 [3]:
![]() .(2.17)
.(2.17)
Завал вершини імпульсу ΔU 0 розраховується таким чином, як у відео підсилювачах [3]:
![]() .(2.18)
.(2.18)
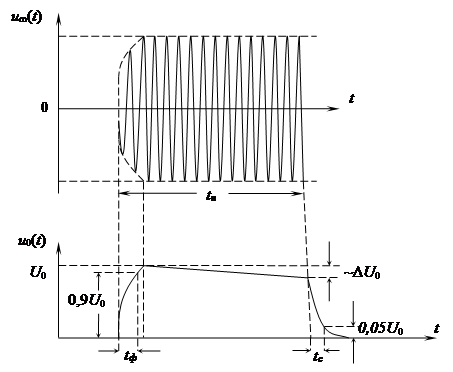
Рисунок 2.8 – Викривлення при детектуванні імпульсних сигналів
Простіший спосіб перетворення частотно-модульованого коливання в амплітудно-частотне модульоване коливання полягає в наступному. Частотно-модульоване коливання приводиться до паралельного коливального контуру, який налаштований на таку частоту f 0 > f н , щоб значення f н приходилося приблизно на середину крутої частини схилу резонансної характеристики контуру (рис. 2.9) [3].
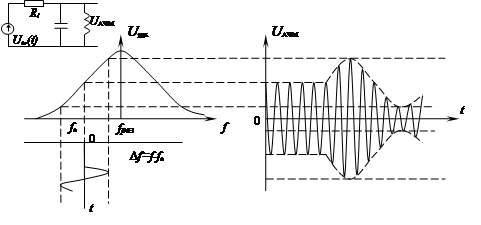
Рисунок 2.9 – Принцип роботи паралельного коливального контуру
Якщо до такого контуру під’єднати амплітудний детектор, то напруга на виході детектора буде відновлювати огинаючу АЧМ коливання. На зміну частоти високочастотного заповнення АЧМ коливання амплітудний детектор не реагує.
Основний недолік одиночного коливального контуру як перетворювача ЧМ-АЧМ складається, у тому що робочий інтервал частот, що відповідає лінійному перетворенню, дуже малий. Значно кращі результати дає використання системи з двох контурів, симетрично розстроєних щодо частоти настроювання детектора.
З двома розстроєними коливальними контурами
На рис. Д.В.2 [3] зображена схема частотного детектора з двома розстроєними контурами. Частотний детектор має два плеча, кожне з яких містить у собі коливальний контур і амплітудний детектор. Коливальні контури налаштовані на частоти f 01 та f 02 , які рівно відстають від частоти настроювання детектора fd на величину Δf 0 (рис. 2.10а) [3].
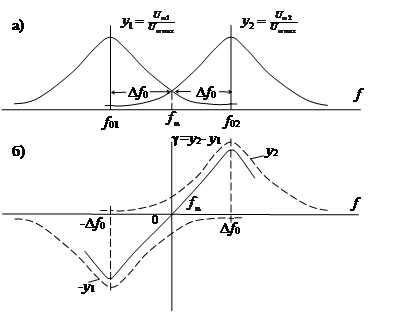
Рисунок 2.10 – Узагальнена характеристика детектрора
Розглянута схема являється балансною – при рівності амплітуд напруг на коливальних контурах, напруга на виході частотного детектора дорівнює нулю. В загальному випадку ![]() , що дозволяє виразити характеристику частотного детектора через різницю резонансних характеристик коливальних контурів
, що дозволяє виразити характеристику частотного детектора через різницю резонансних характеристик коливальних контурів ![]() . Функцію
. Функцію ![]() називають узагальненою характеристикою, побудова її графіка показана на рис. 2.10б [3].
називають узагальненою характеристикою, побудова її графіка показана на рис. 2.10б [3].
Як видно зі схеми та графіків (рис. Д.В.2, 2.10):
![]() ,(2.19)
,(2.19)
![]()
![]() (2.20)
(2.20)
де К d – коефіцієнт детектування амплітудних детекторів;
Um max – амплітуда напруги на контурі при резонансі.
Отже,
![]() .(2.21)
.(2.21)
Таким чином, характеристика частотного детектора (рис. 2.7) відрізняється від узагальненої характеристики (рис. 2.10б) тільки постійним множником К d Um max .
Щоб мати одиничні графіки для розрахунку частотних детекторів у різних діапазонах частот, користуються не абсолютною, а відносно-поточною розстройкою сигналу ![]() . Крім того, враховують параметри конкретних коливальних контурів – еквівалентну добротність QЄ
і відносну фіксовану розстройку
. Крім того, враховують параметри конкретних коливальних контурів – еквівалентну добротність QЄ
і відносну фіксовану розстройку ![]() , що визначає форму резонансних характеристик і їхню прив’язку до початку координат. Об’єднати усі ці параметри і виразити через них узагальнену характеристику зручно за допомогою узагальнених розстройок: поточної узагальненої розстройки сигналу σ і фіксованої узагальненої розстройки контурів σ0
[3]:
, що визначає форму резонансних характеристик і їхню прив’язку до початку координат. Об’єднати усі ці параметри і виразити через них узагальнену характеристику зручно за допомогою узагальнених розстройок: поточної узагальненої розстройки сигналу σ і фіксованої узагальненої розстройки контурів σ0
[3]:
![]() ,(2.22)
,(2.22)
![]() .(2.23)
.(2.23)
Для запису узагальненої характеристики γ, як функції узагальнених розстройок σ та σ0 , скористаємося рівнянням резонансної характеристики одиночного рівнобіжного коливального контуру [3]:
![]() ,(2.24)
,(2.24)
де ![]() – поточна узагальнена розстройка;
– поточна узагальнена розстройка;
![]() – поточна абсолютна розстройка;
– поточна абсолютна розстройка;
f 0 – резонансна частота контуру.
В нашому випадку відлік розстройок ведеться не від резонансних частот контурів f 01 і f 02 , а від частоти настроювання детектора fd . Отже, по відношенню до резонансної частоти першого контуру початок відліку розстройки зміщено на Δf 0 вправо: Δf 1 =Δf к +Δf 0 , а для другого контуру – вліво: Δf 1 =Δf к – Δf 0 .
З врахуванням того, що Δf
0
< fd
, тобто ![]() чи
чи ![]() можна записати [3]:
можна записати [3]:
![]()
![]() (2.25)
(2.25)
(2.26)
Відповідно [3]:
![]()
![]() (2.27)
(2.27)
Графіки залежності ![]() приведені в додатку Г, які побудовані при позитивних значеннях σ. Якщо σ<0, то криві розташовуються в третьому квадранті симетрично відносно початку координат.
приведені в додатку Г, які побудовані при позитивних значеннях σ. Якщо σ<0, то криві розташовуються в третьому квадранті симетрично відносно початку координат.
Від початкової розстройки σ0
залежить яка крутизна узагальнених характеристик, так і довжина їх початкової лінійної ділянки. Тому вибір σ0
слідує здійснювати з обліком конкретних очікуваних значень максимальної розстройки (девіації) Δf
1
max
. Величина σ0
вибирається такою, щоб узагальнена характеристика була лінійною до значення ![]() і при цьому мала можливо велику крутизну.
і при цьому мала можливо велику крутизну.
Крутизна характеристики частотного детектора обчислюється за даними, отриманими із графіка узагальненої характеристики. Для зворотного значення σ0 по величині σmax . Тоді, враховуючи (2.12), (2.21), (2.22), (2.23) вираз для розрахунку S ЧД приймає вигляд [7]:
![]() (2.28)
(2.28)
Далі, якщо відоме максимальне відхилення частоти вхідного сигналу Δf max неважко обчислити межі зміни напруги на виході частотного детектора [3]:
![]() .(2.29)
.(2.29)
На схемі, яка зображена на рис. Д.В.2, коливання на вхід частотного детектора підводяться від транзитного підсилювача, який при необхідності може служити також і обмежувачем амплітуди вхідного сигналу.
З двоконтурним фільтром
Схема детектора зображена на рис. Д.В.3 [3]. Перетворювач ЧМ-АЧМ є двоконтурним, фільтр із зовнішньо-ємкісним зв’язком між контурами (можливий також індуктивний зв’язок). До другого підключені два амплітудні детектори, в загальний ланцюг включається дросель (L ДР ).
Цей ланцюг необхідний для замикання низькочастотних і постійних складових струмів діодів VD 1 і VD 2 . Опір дроселя струмом високої частоти повинен бути великим.
Зі схеми випливає, що контури шунтуються вхідними опорами амплітудних детекторів і притому неоднаково. По відношенню до першого контуру вхідні опори амплітудних детекторів включені паралельно, а по відношенню до другого – послідовно. Тому при розрахунку контурів приймають міри для вирівнювання їх добротностей.
Принцип перетворення ЧМ-АЧМ заснований на зміні фазових співвідношень у контурах. Розглянемо його за допомогою схеми заміщення для коливань високої частоти (рис.2.11) [3] та векторних діаграм (2.12) [3]. При цьому приймемо наступні наближені умови:
![]()
(2.30)
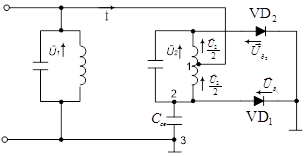
Рисунок 2.11 – Схема заміщення для коливань високої частоти
Крім того, припустимо, що коливальні контури мають однакові резонансні частоти, рівні частоті настройки детектора ![]() . Ємність зв’язку між контурами завжди вибирається малою (Ссв
– одиниці пікофарад), тобто її опір в багато разів більше опору другого контуру. Зробимо спочатку наближений аналіз роботи схеми у випадку, коли модуляція відсутня і на детектор впливає гармонічна напруга з частотою
. Ємність зв’язку між контурами завжди вибирається малою (Ссв
– одиниці пікофарад), тобто її опір в багато разів більше опору другого контуру. Зробимо спочатку наближений аналіз роботи схеми у випадку, коли модуляція відсутня і на детектор впливає гармонічна напруга з частотою ![]() . Розташуємо вертикально вектор
. Розташуємо вертикально вектор ![]() і визначимо положення вектора
і визначимо положення вектора ![]() . Приблизно можна вважати, що струм зв’язку İ
, що протікає по ланцюгу, позначеної 1-2-3, визначається тільки опором конденсатора зв’язку і тому випереджає
. Приблизно можна вважати, що струм зв’язку İ
, що протікає по ланцюгу, позначеної 1-2-3, визначається тільки опором конденсатора зв’язку і тому випереджає ![]() , на π/2.
, на π/2.
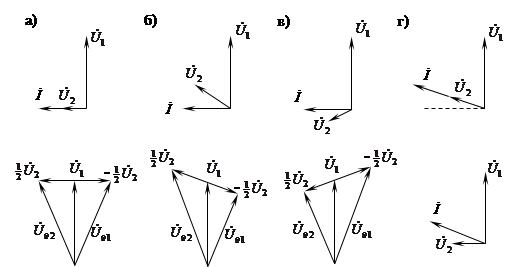
Рисунок 2.12 – Векторні діаграми
Другий контур має активний резонансний опір і, отже, ![]() знаходиться у фазі з İ
(рис. 2.12а). Як видно із схеми включення діодів, напруга на них визначається з рівнянь [3]:
знаходиться у фазі з İ
(рис. 2.12а). Як видно із схеми включення діодів, напруга на них визначається з рівнянь [3]:
![]() (2.31)
(2.31)
Побудувавши векторну діаграму, що відображає дані рівняння, можна зробити висновок, що при ![]() маємо
маємо ![]() , звідси
, звідси ![]() та
та ![]()
При позитивній розстройці ![]() опору контурів набуває активно-ємкісного характеру,
опору контурів набуває активно-ємкісного характеру, ![]() відстає від İ
(рис. 2.12б),
відстає від İ
(рис. 2.12б), ![]() і на виході детектора утворюється напруга
і на виході детектора утворюється напруга ![]() . При негативній роз стойці
. При негативній роз стойці ![]() , опори контурів стають активно-індуктивними,
, опори контурів стають активно-індуктивними, ![]() випереджає İ
(рис. 2.12б) і
випереджає İ
(рис. 2.12б) і ![]() та
та ![]() .
.
Тепер врахуємо активний опір другого контуру, який виявляється все таки відчутним у порівнянні з ємнісним опором конденсатора зв’язку. У цьому випадку при ![]() струм İ
випереджає напругу
струм İ
випереджає напругу ![]() на кут менший π/2 (рис. 2.12г), що викликає розбалансування детектора і появу на виході напруги
на кут менший π/2 (рис. 2.12г), що викликає розбалансування детектора і появу на виході напруги ![]() . Для усунення цього другий контур налаштовують на частоту, трохи більшу частоти налаштування детектора
. Для усунення цього другий контур налаштовують на частоту, трохи більшу частоти налаштування детектора![]() . Тоді опір другого контуру стає активно-індуктивним і напруга
. Тоді опір другого контуру стає активно-індуктивним і напруга ![]() випереджає струм İ
(рис. 2.12г). Регулюванням резонансної частоти другого контуру добиваються зрушення по фазі між
випереджає струм İ
(рис. 2.12г). Регулюванням резонансної частоти другого контуру добиваються зрушення по фазі між ![]() і
і ![]() рівного π/2. Детектор буде збалансований (при
рівного π/2. Детектор буде збалансований (при ![]() напруга
напруга ![]() ).
).
В режимі модуляції, коли розстройка Δf
визначається первинним сигналом, у схемі частотного детектора відбуваються відповідні зміни ![]() . При цьому напруга на виході детектора
. При цьому напруга на виході детектора ![]() на деякому інтервалі змінюється пропорційно величині і відповідно знаку розстройки Δf
також за законом первинного сигналу.
на деякому інтервалі змінюється пропорційно величині і відповідно знаку розстройки Δf
також за законом первинного сигналу.
Ефект перетворення ЧМ-АЧМ зручно враховувати, у попередній схемі, за допомогою узагальненої характеристики γ. В даному випадку замість σ0 роль постійного параметру виконує η – параметр зв’язку між контурами. Графіки залежності γ(σ0 , η) наведені на рис. 2.13 [3].
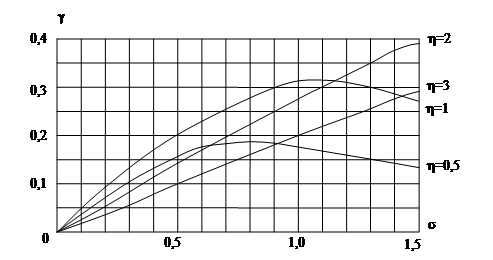
Рисунок 2.13 – Графіки залежності γ(σ0 , η)
Узагальнена характеристика обчислюється виходячи з того, що напруга на виході детектора визначається різницею амплітуд напруги на діодах [3]:
![]() .(2.32)
.(2.32)
Розрахунок кривих γ(σ0 , η) виконують за формулою [7]:
![]() (2.33)
(2.33)
Параметр зв’язку η розраховується з урахуванням того, що коефіцієнт включення р другого контуру рівний 0,5.
![]() .
.
Вибір кривої (η=const) за очікуваним значенням σmax
, а також оцінка перекручувань аналогічні тому, як і для частотного детектора з двома взаємно розстроєними контурами. Крутизна характеристики частотного детектора обчислюється за формулою (2.28), але з підстановкою амплітуди напруги на першому контурі ![]() .
.
При порівнянні графіків узагальнених характеристик (додатку Г і рис. 2.13) випливає, що частотний детектор із двома розстроєними контурами за інших рівних умов має більшу крутизну характеристики, ніж детектор із двоконтурним фільтром. У деяких випадках ця обставина може і визначати вибір схеми детектора.
Проведений аналіз різних схем ЧМ-демодуляторів показує, що необхідне відношення ![]() може бути забезпечено тільки при відносно невеликій девіації частоти ЧМ сигналу. Тому що потужність корисного сигналу на виході демодулятора визначається крутизною детекторної характеристики, що в свою чергу прямо пропорційна добротності контурів перетворювача виду модуляції ЧМ в АЧМ (Qреалізоване
не перевищує 100-200). При збільшенні девіації частоти демодулюючого сигналу добротність контурів зменшується пропорційно збільшенню девіації частоти. Тому спроби демодуляції сигналу з великою девіацією частоти автоматично приводять до погіршення
може бути забезпечено тільки при відносно невеликій девіації частоти ЧМ сигналу. Тому що потужність корисного сигналу на виході демодулятора визначається крутизною детекторної характеристики, що в свою чергу прямо пропорційна добротності контурів перетворювача виду модуляції ЧМ в АЧМ (Qреалізоване
не перевищує 100-200). При збільшенні девіації частоти демодулюючого сигналу добротність контурів зменшується пропорційно збільшенню девіації частоти. Тому спроби демодуляції сигналу з великою девіацією частоти автоматично приводять до погіршення ![]() на виході демодулятора.
на виході демодулятора.
У такий спосіб в існуючих схемах ЧМ демодуляторів мають місце протиріччя між відношенням ![]() та величиною девіації частоти, а отже і смугою частот, яку займає сигнал. З ростом ширини спектру демодулюючого сигналу пропорційно зростає потужність шумів, а потужність корисного сигналу зменшується через зменшення крутизни характеристики демодулятора.
та величиною девіації частоти, а отже і смугою частот, яку займає сигнал. З ростом ширини спектру демодулюючого сигналу пропорційно зростає потужність шумів, а потужність корисного сигналу зменшується через зменшення крутизни характеристики демодулятора.
Вирішення даної проблеми забезпечується в запропонованій схемі частотного демодулятора (додаток Д).
Викривлення при детектуванні ЧМ коливань
Розглянемо викривлення при частотному детектуванні. Припустимо, що амплітуда вхідного коливання постійна. В цьому випадку викривлення можуть виникати з таких причин:
– за рахунок не лінійності перетворення ЧМ-АЧМ;
– за рахунок викривлення при амплітудному детектуванні;
– за рахунок відхилення частотних параметрів вхідного сигналу (![]() ) від розрахункових значень.
) від розрахункових значень.
Викривлення при перетворення ЧМ-АЧМ виникають внаслідок не лінійності робочої ділянки узагальненої характеристики. Ці перекручування оцінюють коефіцієнтом гармонік. Амплітуди гармонік ![]() визначають методом п’яти ординат за графіком узагальненої характеристики (рис. 2.14) [6].
визначають методом п’яти ординат за графіком узагальненої характеристики (рис. 2.14) [6].
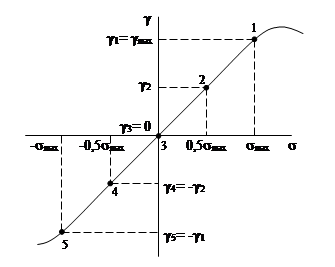
Рисунок 2.14 – Графік узагальненої характеристики
Завдяки симетричності кривих γ(σ) відносно початку координат ![]() , вираз для розрахунку коефіцієнта гармонік спрощується [6]:
, вираз для розрахунку коефіцієнта гармонік спрощується [6]:
![]() ,(2.34)
,(2.34)
де:
![]() (2.35)
(2.35)
![]() .(2.36)
.(2.36)
Якщо амплітудні детектори лінійні, то нелінійні викривлення частотного детектора оцінюють тільки за узагальненою характеристикою. В іншому випадку, їх потрібно оцінювати за характеристикою частотного детектора, яку зручно отримати експериментально.
Викривлення за рахунок відхилення частотних параметрів вхідного сигналу від номіналу можна простежити за характеристикою частотного детектора (рис. 2.15) [3]. Ці викривлення мають дві основні причини:
– по-перше, якщо ![]() значно більше розрахункової, то невеликі викривлення переростають у двостороннє обмеження вихідного коливання з характерними провалами (рис. 2.15а);
значно більше розрахункової, то невеликі викривлення переростають у двостороннє обмеження вихідного коливання з характерними провалами (рис. 2.15а);
– по-друге, якщо частота несучого коливання відрізняється від номінальної, тобто ![]() , то може з’явитися одностороннє обмеження. Крім того, не модульоване коливання буде викликати постійну напругу на виході (рис. 2.15б).
, то може з’явитися одностороннє обмеження. Крім того, не модульоване коливання буде викликати постійну напругу на виході (рис. 2.15б).
При сильному відхиленні ![]() та невеликій девіації може виникнути помилкове настроювання, при якому вихідна напруга за формою не викривлена (рис. 2.15б). Для помилкового настроювання характерна наявність постійної складової і зміна фази змінної напруги на виході. Якщо
та невеликій девіації може виникнути помилкове настроювання, при якому вихідна напруга за формою не викривлена (рис. 2.15б). Для помилкового настроювання характерна наявність постійної складової і зміна фази змінної напруги на виході. Якщо ![]() , то на вході з’являється викривлене коливання з подвійною частотою (рис. 2.15г).
, то на вході з’являється викривлене коливання з подвійною частотою (рис. 2.15г).
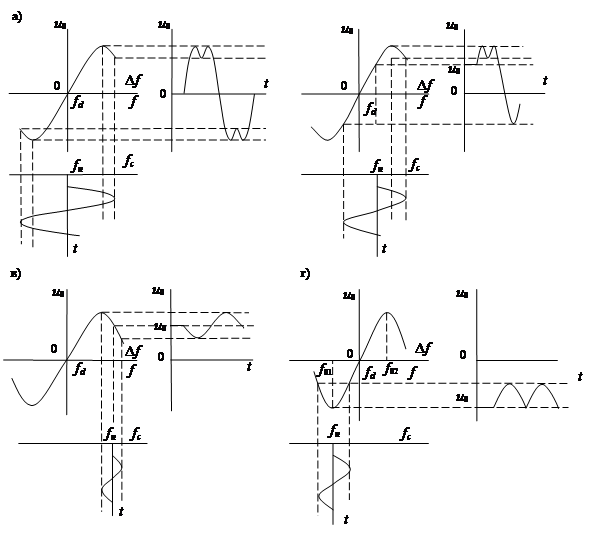
Рисунок 2.15 – Характеристики частотних детекторів
Частотні детектори проектують так, щоб по можливості виключити сильні викривлення. Зазвичай, робочий (лінійний) інтервал характеристики частотного детектора вибирають приблизно рівним смузі пропускання підсилювача проміжної частоти.
Частотні детектори, призначені для систем авто підбору частоти, при ![]() вибирають сигнал
вибирають сигнал ![]() , які використовуються для керування частотою гармонічних коливань в генераторах. В цьому випадку не потрібно, щоб детекторна характеристика була лінійною, але потрібна можливо більша крутизна на початку координат. Дослід на максимум
, які використовуються для керування частотою гармонічних коливань в генераторах. В цьому випадку не потрібно, щоб детекторна характеристика була лінійною, але потрібна можливо більша крутизна на початку координат. Дослід на максимум ![]() при σ = 0 показує, що оптимальним є значення
при σ = 0 показує, що оптимальним є значення ![]() .
.
Розглянуті вище викривлення можуть виникати при постійній амплітуді вхідного коливання. Якщо ж, по яким би то причинам (наприклад, при дії перешкод або завмиранні сигналу) амплітуда вхідного коливання змінюється, то ці зміни в результаті амплітудного детектування будуть відновлені на виході частотного детектора у вигляді викривлень корисного сигналу.
|
Для того, щоб виключити такі викривлення створюють обмеження амплітуди детекторного коливання, тобто фіксують її величину на деякому постійному рівні. Це робиться в спеціальному обмежувачі, або в підсилювальному каскаді.
2.2 Використання частотних демодуляторів у техніці зв’язку
Тракт прийому сигналу ЧМ в радіоапаратурі
Частотна модуляція (ЧМ) знаходить широке застосування у радіо і радіорелейному зв’язку, це пояснюється наявністю переваг ЧМ в порівнянні з АМ. Застосування ЧМ дозволяє значно покращити використання потужності передавача, збільшити завадостійкість прийому сигналів, підвищити якісні показники приймача (динамічний діапазон, лінійність та ін.). найбільш повно ці переваги реалізуються при великих індексах частотної модуляції, що приводить до широкої смуги частот, які випромінює передавач. Внаслідок цього радіотелефонний зв’язок з ЧМ використовується на ультракоротких хвилях (метрових) тобто, де можливо реалізувати широкосмугові канали зв’язку.
При використанні ЧМ з’являється можливість здійснити багатоканальний зв’язок з високою завадостійкістю і ефективністю. З цією метою передавач радіолінії модулюється складним груповим сигналом, отриманим в підсумку модуляції ряду під несучих частот первинними модулюючими сигналами від відповідних джерел повідомлень. Таким чином здійснюється подвійна модуляція передавача. В якості первинної модуляції можна використовувати односмугову та частотну модуляцію, але частіше усього для звуження випромінюваного спектру використовується односмугова модуляція. Багатоканальний радіозв’язок з ЧМ знаходить широке використання при необхідності передачі дуже великого числа каналів. В цьому випадку особливо необхідно використовувати УКХ діапазон, так як у ньому відсутні вибіркові завмирання сигналів.
Приймачі одноканальних та багатоканальних передач з ЧМ мають багато спільного в побудові радіотракту.
Одноканальний, багатоканальний прийом мають ряд ідентичних блоків – загальний радіотракт, амплітудний обмежувач і частотний детектор.
Загальний радіотракт призначений забезпечувати необхідне підсилення і вибірковість приймача та рівня сигналу на виході обмежувача. Рівень сигналу на виході обмежувача повинен в декілька разів перевищувати поріг обмежувача. Для прийому ЧМ сигналів використовують в основному супергетеродинні приймачі, внаслідок цього радіотракт повинен забезпечувати подавлення побічних каналів прийому, вибірковість по сусідніх каналах прийому, багато-сигнальну вибірковість. Особливістю радіотракту приймача ЧМ сигналів є широка смуга пропускання і жорсткі вимоги до фазових характеристик. Враховуючи необхідність широкої смуги пропускання загального підсилення, а також неможливість забезпечити високий коефіцієнт підсилення в кожному каскаді (високі частоти ускладнюють радіотракт в порівнянні з приймачами АМ сигналів). Радіотракти одноканального та багатоканального приймачів відрізняються тільки величиною смуги пропускання і вимогами до фазових і частотних характеристик.
Амплітудний обмежувач призначений для усунення паразитної амплітудної модуляції сигналу. Можливість усунення паразитної амплітудної модуляції, яка виникає головним чином під дією перешкод, є однією з причин високої завадостійкості приймача ЧМ сигналів. Ефективність обмеження оцінюється коефіцієнтом обмеження, який показує у скільки разів глибина паразитної амплітудної модуляції сигналу на виході обмежувача менша, ніж на його вході.
Частотний детектор перетворює високочастотну модульовану по частоті напругу в напругу низької частоти, що відтворює закон модуляції. Таку ж задачу вирішує частотний детектор і в багатоканальному прийомі, однак в даному випадку на його виході отримують груповий сигнал, який потребує додаткової обробки раніше, ніж отримають вихідний низькочастотний сигнал. Схеми частотних детекторів і вимог до їх характеристик в залежності від параметрів радіосигналів і допустимих викривлень розглядаються в загальних радіотехнічних курсах. Можна відмітити, що при використанні дрібного детектора або детектора відхилення можна відмовитися від обмеження, так як такий детектор реагує на зміни амплітуди.
Після частотного детектора структурні схеми одноканальних та багатоканальних приймачів істотно відрізняються. В одноканальному приймачі за детектором слідує тракт підсилення коливань низької частоти. Цей тракт повинен мати смугу пропускання та інші характеристики такими, щоб забезпечувалися необхідні підсилення при мінімальних викривленнях сигналу. Вихідний рівень повинен забезпечувати нормальну роботу кінцевого пристрою. В багатоканальному приймачі після детектора зазвичай є груповий підсилювач, блок розподілу каналів по частоті, демодулятори каналів і канальні підсилювачі низької частоти. Груповий підсилювач призначений для підсилення групового сигналу, який включає в себе всі канали. Схема розподілу каналів забезпечує розфільтрування без взаємних перешкод між каналами.
Задачею демодуляторів є отримання низькочастотних спектрів каналів. В залежності від виду первинної модуляції сигналів демодулятори можуть представляти собою амплітудний детектор (при первинній АМ) і гетеродинний детектор (при односмуговій первинній модуляції). На виході кожного каналу ставиться підсилювач низької частоти, який виконує ті ж самі задачі, що і в одноканальному приймачі.
Загальний радіотракт відрізняється лише своїми параметрами, тому потрібно лише вміло вибрати ці параметри для забезпечення невикривленого прийому сигналів.
3. ШЛЯХИ ПІДВИЩЕННЯ ЕФЕКТИВНОСТІ ЧАСТОТНИХ ДЕМОДУЛЯТОРІВ
В попередніх питаннях проведено детальний опис сигналу ЧМ та демодуляторів цього сигналу. Ширину спектру частотно-модульованого сигналу можна визначити за допомогою формули Манаєва [2]:
![]() ,(3.1)
,(3.1)
більш точніше визначається за наступною формулою:
![]() ,(3.2)
,(3.2)
де ![]() – максимально можлива частота напруги, що модулює;
– максимально можлива частота напруги, що модулює;
![]() – індекс частотної модуляції.
– індекс частотної модуляції.
При девіації частоти 5 кГц та максимальній частоті первинного сигналу 3,4кГц ширина спектру сигналу ЧМ становить ![]() .
.
Виграш від застосування методів частотної модуляції пропорційний квадрату індексу ![]() частотної модуляції. Але зі збільшенням індексу частотної модуляції зростає ширина спектру модульованих сигналів. Отже, підвищення завадостійкості в системах з частотною модуляцією досягається завдяки розширенню їхнього спектру і збільшення, відповідно, смуги частот, яку займає канал зв’язку з розглянутим видом модуляції.
частотної модуляції. Але зі збільшенням індексу частотної модуляції зростає ширина спектру модульованих сигналів. Отже, підвищення завадостійкості в системах з частотною модуляцією досягається завдяки розширенню їхнього спектру і збільшення, відповідно, смуги частот, яку займає канал зв’язку з розглянутим видом модуляції.
Варто звернути увагу на те, що значення узагальненого виграшу, який визначає потенційну завадостійкість каналів зв’язку з розглянутим видом модуляції, є справедливим лише для відносно слабких перешкод, для яких виконується нерівність ![]() .
.
У каналах зв’язку з частотною модуляцією приведена нерівність може виконуватися лише для визначеної області значень індексів модуляції, менших деяких критичних значень. При збільшенні значення індексів частотної модуляції ї зв’язаним з цим збільшенням ширини спектрів сигналів зменшується перевищення сигналу над перешкодою ![]() на вході демодулятора (детектора), що приводить до придушення сигналу перешкодою і зменшенню відношення сигналу до перешкоди на його виході.
на вході демодулятора (детектора), що приводить до придушення сигналу перешкодою і зменшенню відношення сигналу до перешкоди на його виході.
При зменшенні відношення потужності сигналу до питомої інтенсивності перешкоди ![]() менше деякого граничного
менше деякого граничного ![]() перевищення сигналу над перешкодою на виході приймача сигналів ЧМ (а отже, і його завадостійкості) різко зменшується. Граничне значення відношення
перевищення сигналу над перешкодою на виході приймача сигналів ЧМ (а отже, і його завадостійкості) різко зменшується. Граничне значення відношення ![]() збільшується зі збільшенням індексу модуляції, тому що при великому індексі модуляції (більш широкій смузі частот) перевищення сигналу над перешкодою на вході демодулятора зменшується.
збільшується зі збільшенням індексу модуляції, тому що при великому індексі модуляції (більш широкій смузі частот) перевищення сигналу над перешкодою на вході демодулятора зменшується.
Після проведення аналізу схем частотних детекторів ЧМ сигналів видно, що вони не можуть забезпечувати різну девіацію частоти, але з різною крутизною характеристик сигналу в співвідношенні сигналу до перешкоди. Для того, щоб краще отримувати сигнали, які передаються, використовують частотні демодулятори (детектори) з малою девіацією частот, а отже малим індексом модуляції.
Але постає проблема забезпечення передачі високошвидкісних потоків сигналів, а на даному етапі розвитку зв’язку використовують сигнали ЧМ ![]() . Для того, щоб забезпечити широкий спектр передачі сигналів ЧМ потрібно застосовувати засоби поліпшення. Отже, запропонуємо розроблену схему для забезпечення потрібної девіації частоти, не погіршуючи крутизни характеристики відношення сигналу до перешкоди. (Схема в додатку Д).
. Для того, щоб забезпечити широкий спектр передачі сигналів ЧМ потрібно застосовувати засоби поліпшення. Отже, запропонуємо розроблену схему для забезпечення потрібної девіації частоти, не погіршуючи крутизни характеристики відношення сигналу до перешкоди. (Схема в додатку Д).
Амплітудний обмежувач призначений для забезпечення нормальної роботи частотного демодулятора, тому що амплітуда сигналу на виході повинна бути постійною. Він усуває, так звану, паразитну амплітудну модуляцію. Робота амплітудного обмежувача допускає, що рівень сигналу на вході в будь-якому випадку буде вище порогу обмеження.
Далі сигнал поступає на частотні демодулятори, зібрані паралельним каскадом, але налаштовані на певний діапазон частот. В частотному демодуляторі відбувається перетворення сигналу з частотною модуляцією в копію первинного сигналу. Спочатку відбувається демодуляція в частотному демодуляторі ЧД1 . Після закінчення прийому сигналу на частоті, на яку налаштований демодулятор відбувається відключення і включення наступних демодуляторів, підключених паралельно до основного. Кількість демодуляторів не повинна бути меншою 3-х.
Для того, щоб перетворений сигнал не був загублений, він поступає в пристрій лінійного запам’ятовування амплітуди лінійної ділянки амплітудно-частотної характеристики частотного демодулятора. Після якого потрапляє на пристрій аналізу полярності напруги на виході частотного демодулятора і його зчитування. Це дає можливість проаналізувати амплітуду отриманого сигналу та зробити висновок формувачу команд управління комутаторами.
На керуючому комутаторі відбувається почергове зчитування амплітуди сигналу на суматор, в якому відбувається сумування лінійних ділянок характеристик сигналу, та подача на вихід прогумованого (складеного) сигналу.
Із графіку амплітудно-частотної характеристики видно, що на виході частотного демодулятора отримаємо потрібну лінійну ділянку амплітудно-частотної характеристики сигналу, при великому значенні девіації частоти.
Загальна ідея роботи запропонованого демодулятора (додатку Е) полягає в наступному: характеристикам демодулятора з заданою крутизною формується шляхом сумування лінійних ділянок детекторних характеристик n - паралельно включених частотних детекторів, кожний з яких забезпечує детектування визначеної частини смуги частот, яку займає спектр вхідного сигналу, для того щоб розбити загальну смугу частот на n – ділянок, а частоти настроювання детекторів вибираються рівними нижній граничній частоті кожної з цих ділянок.
Напруга з виходу амплітудного обмежувача надходить на входи паралельно з’єднаних основного ЧД1
та 2n
допоміжних ЧД, частоти настроювання яких зміщені відносно ЧД1
на величину ![]() (
(![]() – номер допоміжного детектора). Напруга на відповідні лінійній ділянці записується елементами пам’яті на додатку Д позначені 2n
. Вихідний сигнал з елементів пам’яті подається на входи схеми зчитування інформації (схема зчитування 3 використовується при формуванні позитивної гілки детекторної характеристики, а 3´ негативної її гілки). З виходів схем зчитування з виходів основного і допоміжного детекторів формуючи гілку детекторної характеристики надходять на входи керованого комутатора 5, а з його виходу на вхід суматора 6. стан керованих комутаторів 5 і 5´, відповідно позитивної та негативної гілки детекторної характеристики, визначається сигналом з виходу схем керування 4 і 4´. При позитивній девіації частоти сигналом з виходу схеми керування 4 закривається керованим комутатором 5´, в результаті чого виключається надходження на вхід суматора 6 шумів з виходів допоміжних детекторів формуючи негативну галузь детекторної характеристики демодулятора.
– номер допоміжного детектора). Напруга на відповідні лінійній ділянці записується елементами пам’яті на додатку Д позначені 2n
. Вихідний сигнал з елементів пам’яті подається на входи схеми зчитування інформації (схема зчитування 3 використовується при формуванні позитивної гілки детекторної характеристики, а 3´ негативної її гілки). З виходів схем зчитування з виходів основного і допоміжного детекторів формуючи гілку детекторної характеристики надходять на входи керованого комутатора 5, а з його виходу на вхід суматора 6. стан керованих комутаторів 5 і 5´, відповідно позитивної та негативної гілки детекторної характеристики, визначається сигналом з виходу схем керування 4 і 4´. При позитивній девіації частоти сигналом з виходу схеми керування 4 закривається керованим комутатором 5´, в результаті чого виключається надходження на вхід суматора 6 шумів з виходів допоміжних детекторів формуючи негативну галузь детекторної характеристики демодулятора.
При демодуляції сигналу з девіацією частоти, яка не перевищує ![]() , з детекторної характеристики ЧД1
. При збільшенні девіації частоти, характеристика демодулятора формується з лінійної ділянки детекторної характеристики ЧД1
, що запам’ятовується елементом пам’яті на його виході і лінійній ділянці детекторної характеристики допоміжного ЧД2
. При подальшому збільшенні девіації частоти характеристика демодулятора взагалі формується шляхом підсумовування лінійних ділянок детекторних характеристик основного і допоміжних ЧД.
, з детекторної характеристики ЧД1
. При збільшенні девіації частоти, характеристика демодулятора формується з лінійної ділянки детекторної характеристики ЧД1
, що запам’ятовується елементом пам’яті на його виході і лінійній ділянці детекторної характеристики допоміжного ЧД2
. При подальшому збільшенні девіації частоти характеристика демодулятора взагалі формується шляхом підсумовування лінійних ділянок детекторних характеристик основного і допоміжних ЧД.
Крутизна детекторних характеристик усіх частотних детекторів вибирається рівною крутизні детекторної характеристики демодулятора в цілому, що визначається вимогою забезпечення заданого відношення сигнал/шум на виході демодулятора.
Розглянутий метод побудови частотних демодуляторів з використанням синтезування результуючої характеристики з лінійних ділянок вузькосмугових ЧД із високою крутизною в літературі не описаний.
4. РОЗРАХУНОК ПРИНЦИПОВОЇ СХЕМИ ЧАСТОТНОГО ДЕМОДУЛЯТОРА
Розрахунок структурної схеми повинен містити всі складові необхідні для підбору елементів схеми. Принципова схема – це схема, на якій загальноприйнятими умовними графічними та індексованими літерними позначками зображені і позначені всі елементи какаду (групи каскадів), показані їх внутрішні та зовнішні зв’язки.
При розрахунку структурної схеми приймача визначається: вхідний опір першого каскаду низькочастотного тракту, смуга пропускання високочастотного тракту приймача, схема детектора, типи діодів та опори їх резисторів навантаження.
При розрахунку каскаду уточнюється схема детектора, яка включає всі елементи зв’язку з суміжними каскадами, визначаються параметри детектора і всіх елементів його схеми.
Таким чином, перед початком розрахунку потрібно зробити аналіз схеми для визначення методу розрахунку і всіх елементів, що мають вплив на якісний прийом сигналу.
В додатку Е приведена принципова схема диференціального детектора ЧМС та показані елементи зв’язку з суміжними каскадами.
Розрахунок запропонованої схеми розпочинають з транзисторного амплітудного обмежувача, схема якого є першим каскадом.
Для радіомовних і телевізійних приймачів проміжної частоти для тракту ЧМС задається ГОСТ. При розрахунку структурної схеми приймача вибирають:
– схему та тип електронного приладу;
– напругу ![]() порогу обмеження;
порогу обмеження;
– амплітуду вихідної напруги ![]() ;
;
– коефіцієнт амплітудної модуляції ![]() вихідного сигналу завадою;
вихідного сигналу завадою;
– коефіцієнт обмеження ![]() .
.
Задачею розрахунку є:
1. Вибір оптимального режиму роботи нелінійного елементу.
2. Розрахунок параметрів елементів схеми.
3. Уточнення амплітуд вхідного та вихідного сигналів.
Для зменшення порогової напруги і збільшення коефіцієнта обмеження транзистор повинен працювати при зниженій колекторній напрузі 2-3 В, за рахунок використання дільника напруги, що складається з резисторів ![]() і
і ![]() .Для достатньо стабільної роботи опори цих резисторів визначають з рівнянь [6]:
.Для достатньо стабільної роботи опори цих резисторів визначають з рівнянь [6]:
![]() (4.1)
(4.1)
в яких ІК 1 – колекторний струм транзистора в робочій точці А (рис. 4.1) [6].
![]()
Рисунок 4.1 – Вихідні характеристики транзистора
При цьому струм, який споживає каскад від джерела живлення, буде 3ІКА . Опір резистора фільтру вибирають рівним 0,5-1 кОм, а коефіцієнт включення контуру в колекторний ланцюг, таким що задовольняє нерівності:
![]() ,(4.2)
,(4.2)
де ![]() – еквівалентна провідність першого колекторного контуру.
– еквівалентна провідність першого колекторного контуру.
Опір фазового резистора визначають за формулою [6]:
![]() .(4.3)
.(4.3)
Амплітудна характеристика (рис. 4.2) [6] визначається за наступною методикою: вибирається напруга живлення колекторного ланцюга ЕК
0
і на полі вихідних характеристик (див. рис. 4.1) будується характеристика навантаження 1 по постійному струму, яка проходить через точку Д
, якій відповідає напруга ЕК
0
на осі абсцис, під кутом ![]() , що визначається рівністю:
, що визначається рівністю:
![]() .(4.4)
.(4.4)
![]()
Рисунок 4.2 – Амплітудна характеристика
На цій характеристиці вибирають робочу точку А , що відповідає середині відрізка ГД та знаходиться на характеристиці, для якої
![]() .(4.5)
.(4.5)
Визначають для неї струми ІКА
та ІБА
. Через точку А
проводять характеристику навантаження для змінного струму 2 з кутом нахилу ![]() , що визначається рівністю [6]:
, що визначається рівністю [6]:
![]()
![]() ,(4.6)
,(4.6)
Визначають точки Б
і В
, а по них відповідні їм струми ![]() . Точки А
, Б
і В
переносять на вхідну характеристику транзистора з напругою
. Точки А
, Б
і В
переносять на вхідну характеристику транзистора з напругою ![]() , та визначають напругу
, та визначають напругу ![]() ,
, ![]() та
та ![]() . За формулою [6]:
. За формулою [6]:
![]() (4.7)
(4.7)
обчислюють максимальну амплітуду вхідного сигналу ![]() в лінійному режимі, до якої обмежувач практично працює як підсилювач і його амплітудну характеристику можна вважати прямолінійною. При цих значеннях вхідного сигналу амплітуда напруги на першому колекторному контурі визначається з рівності [6]:
в лінійному режимі, до якої обмежувач практично працює як підсилювач і його амплітудну характеристику можна вважати прямолінійною. При цих значеннях вхідного сигналу амплітуда напруги на першому колекторному контурі визначається з рівності [6]:
![]() .(4.8)
.(4.8)
Провідність прямої передачі в робочій точці визначається з рівності [6]:
![]() ,(4.9)
,(4.9)
де ![]() та
та ![]() – параметри транзистора, що відповідають табличним даним. Коли амплітуда вхідного сигналу перевищує
– параметри транзистора, що відповідають табличним даним. Коли амплітуда вхідного сигналу перевищує ![]() , транзистор працює з відсіканням обох на півперіодів колекторного струму і відповідає рівності [6]:
, транзистор працює з відсіканням обох на півперіодів колекторного струму і відповідає рівності [6]:
![]() .(4.10)
.(4.10)
Коефіцієнт Н визначається з графіку (рис. 4.3) [6]. Він є частиною амплітудної характеристики обмежувача, що працює в нелінійному режимі. З неї випливає, що порогова напруга обмежувача
![]() .(4.11)
.(4.11)
Вихідна напруга при ![]() дорівнює:
дорівнює:
![]() .(4.12)
.(4.12)
![]()
Рисунок 4.3 – Коефіцієнт Н амплітудної характеристики обмежувача
Розраховують параметри обмежувача амплітуди з транзистором ГТ308В з початковими даними ![]() та
та ![]() , що відповідає вимогам до приймача І класу.
, що відповідає вимогам до приймача І класу.
Задамося напругою ![]() і опором фільтру 1 кОм. Згідно рівності (4.4)
і опором фільтру 1 кОм. Згідно рівності (4.4) ![]() , чому відповідає лінія 1 на рис. 4.1, на якій вибирається початкова робоча точка А
, для якої
, чому відповідає лінія 1 на рис. 4.1, на якій вибирається початкова робоча точка А
, для якої ![]() . За нерівністю (4.2) обчислюється коефіцієнт включення:
. За нерівністю (4.2) обчислюється коефіцієнт включення:
![]()
Приймаємо ![]() = 0,18. З рівняння (4.6) отримуємо, що
= 0,18. З рівняння (4.6) отримуємо, що
![]() .
.
Лінія 2 на рис. 4.1 відповідає цьому куту. Для точки Б
отримуємо ![]() .
.
З формули (4.1) знаходимо:
![]()
![]()
Обирають резистори опором 680 Ом та 910 Ом.
Ємність конденсатора:
![]() , аналогічно
, аналогічно
![]() .
.
За даними із довідника обирають конденсатори ємністю 1500 і 2200 пФ.
На вхідну характеристику транзистора, що відповідає колекторній напрузі 3В, переносять точки А
, Б
і В
. Напруга цих точок дорівнює ![]() ,
, ![]() =0,16 В та
=0,16 В та ![]() =0,05 В. За допомогою довідника знаходять
=0,05 В. За допомогою довідника знаходять ![]() , отже
, отже
![]() .
.
З рівності (4.3) обчислюють опір резистора:
![]() .
.
Обираємо резистор опором 910 кОм.
За формулою (4.7) знаходимо вхідну напругу:
![]() .
.
В довіднику для ![]() . Згідно (4.9) отримаємо
. Згідно (4.9) отримаємо ![]() .
.
Вихідну напругу в кінці лінійної ділянки амплітудної характеристики обчислюємо з рівності (4.8):
![]() .
.
Для ![]() по графіку на рис. 4.3 отримаємо Н
=1,24. За формулою (4.10) знаходимо відповідне даній амплітуді значення вхідного сигналу
по графіку на рис. 4.3 отримаємо Н
=1,24. За формулою (4.10) знаходимо відповідне даній амплітуді значення вхідного сигналу ![]() та амплітуду вихідної напруги
та амплітуду вихідної напруги ![]() .
.
Результати аналогічних розрахунків вхідного сигналу приведені в табл.4.1.
Таблиця 4.1 – Результати розрахунків
|
|
0,055 |
0,075 |
0,11 |
0,2 |
0,4 |
0,6 |
|
|
5,75 |
6,39 |
7,1 |
7,25 |
7,3 |
7,34 |
З рівності (4.11) отримаємо: ![]() , що відповідає точці П
на рис. 4.2. амплітуда вхідного сигналу в робочій точці повинна бути
, що відповідає точці П
на рис. 4.2. амплітуда вхідного сигналу в робочій точці повинна бути ![]() . Візьмемо
. Візьмемо ![]() = 0,2 В.
= 0,2 В.
При цьому з рис 4.2 ![]() та
та ![]() . За формулою:
. За формулою:
![]()
Отримаємо ![]() .
.
З рівності ![]() знаходимо
знаходимо ![]() (25,1 дБ).
(25,1 дБ).
Струм, який споживає каскад дорівнює: ![]() .
.
Далі переходимо до розрахунку самого ЧМС.
Середні ємності підстроюючих конденсаторів в контурі визначається з рівності:
![]() (4.13)
(4.13)
![]()
де ![]() – власна ємність котушок;
– власна ємність котушок;
![]() – вихідна ємність транзистора обмежувача амплітуди;
– вихідна ємність транзистора обмежувача амплітуди;
![]() – ємність діодів детектора;
– ємність діодів детектора;
![]() – монтажні ємності, віднесені до першого та другого контурів.
– монтажні ємності, віднесені до першого та другого контурів.
Ємність конденсатора С знаходиться з нерівності:
![]() ,(4.14)
,(4.14)
де ![]() – провідність другого контуру селективної системи.
– провідність другого контуру селективної системи.
Припустимо, що в конденсаторах С 1 та С 2 , R 2 = 0 і m max = 0,1 (завдяки роботі обмежувача амплітуди).
Індуктивність дроселя визначається з нерівності [6]:
![]() .(4.15)
.(4.15)
Ємність конденсатора перехідного фільтру обчислюється за формулою [6]:
![]() .(4.16)
.(4.16)
Коефіцієнт зв’язку між контурними котушками визначається рівністю [6]:
![]() .(4.17)
.(4.17)
Розрахуємо параметри схеми диференціального детектора.
Детектор призначається для переносного приймача І класу, що має проміжну частоту 8,4 МГц. Рахуємо ![]() = 0,02 мкФ і Мн
= Мв
= 1,1.
= 0,02 мкФ і Мн
= Мв
= 1,1.
Припустимо, що ![]() = 0,5 пФ, р
к
= 0,5 пФ, р
к
![]() р
д
р
д
![]() 0,5 (максимально допустиме в схемі) та
0,5 (максимально допустиме в схемі) та ![]() . За формулою (4.13) обчислюємо
. За формулою (4.13) обчислюємо![]() та
та ![]() :
:
![]()
![]() .
.
Індуктивність контурних котушок:
![]() .
.
Ємність конденсатора С з нерівності (4.14):
![]() . (обирають конденсатор Ємністю 100 пФ).
. (обирають конденсатор Ємністю 100 пФ).
За формулою [6]:
![]() ;
; ![]() ,
,
Знаходимо ![]() та
та ![]() .
.
З формули ![]() отримаємо:
отримаємо:
![]() .
.
У випадку ![]() , за допомогою довідника визначаємо, що
, за допомогою довідника визначаємо, що ![]() .
.
За раніше розрахованими ємностями в довіднику обираємо конденсатор ємністю 0,05 мкФ.
Індуктивність дроселя визначається з нерівності (4.15):
![]() .
.
Ємність конденсатора перехідного фільтру визначається з формули (4.16):
![]() . (обираємо конденсатор ємністю 0,15мкФ)
. (обираємо конденсатор ємністю 0,15мкФ)
Коефіцієнт зв’язку визначається із рівності (4.17):
![]() .
.
Потім сигнал потрапляє в пристрій лінійного запам’ятовування амплітуди лінійної ділянки амплітудно-частотної характеристики частотного демодулятора. Його обирають із довідника, як такого, що найбільш задовольняє вимогам до оксидно-електролітичних конденсаторів.
З пристрою лінійного запам’ятовування сигнал потрапляє на схему аналізу полярності, яка виконана на основі компаратора напруги.
Наступний крок – розрахунок схеми компаратора. При ![]() струми
струми ![]() та
та ![]() через ДУ1 і ДУ2 майже повністю перемкнуті в одне з плечей, і напруга на виходах каскадів встановлюється у відповідному крайньому стані. Це початковий стан компаратора. Потім полярність
через ДУ1 і ДУ2 майже повністю перемкнуті в одне з плечей, і напруга на виходах каскадів встановлюється у відповідному крайньому стані. Це початковий стан компаратора. Потім полярність ![]() міняється, і на вході встановлюють невелику диференціальну напругу
міняється, і на вході встановлюють невелику диференціальну напругу ![]() , при якій звичайно вимірюють
, при якій звичайно вимірюють ![]() сучасних компараторів напруги. В даному випадку до повного перемикання струму
сучасних компараторів напруги. В даному випадку до повного перемикання струму ![]() в інше плече ДУ2 (це забезпечить максимальну зміну струму в його навантаженні, а отже, і мінімальний час перемикання вихідної напруги) необхідне, щоб диференціальна вихідна напруга ДУ1 змінилася від початкового –
в інше плече ДУ2 (це забезпечить максимальну зміну струму в його навантаженні, а отже, і мінімальний час перемикання вихідної напруги) необхідне, щоб диференціальна вихідна напруга ДУ1 змінилася від початкового – ![]() , до
, до ![]() (
(![]() , якщо на вході ДУ2 використані складові транзистори). Останнє відбувається під дією зміни струму в навантаженні ДУ1
, якщо на вході ДУ2 використані складові транзистори). Останнє відбувається під дією зміни струму в навантаженні ДУ1 ![]() на величину
на величину ![]() . Припустимо, що спочатку транзистор ДУ безіенерційний, вважатимемо
. Припустимо, що спочатку транзистор ДУ безіенерційний, вважатимемо ![]() ідеальним перепадом струму в навантаженні
ідеальним перепадом струму в навантаженні ![]() . Тоді затримку
. Тоді затримку ![]() , яку вносить ДУ1, визначають, прирівнявши оригінал від
, яку вносить ДУ1, визначають, прирівнявши оригінал від ![]() до
до ![]() [6]:
[6]:
![]() .(4.18)
.(4.18)
Оскільки в ДУ1 для включення погрішності, що вноситься ДУ2, вибирається ![]() . Тому, для розрахунку
. Тому, для розрахунку ![]() доцільно вважати, що у момент
доцільно вважати, що у момент ![]() на вхід ДУ2 поступає ідеальний перепад напруги
на вхід ДУ2 поступає ідеальний перепад напруги ![]() . Тоді
. Тоді ![]() можна визначити аналогічно
можна визначити аналогічно ![]() , враховуючи тільки, що для ДУ2 К
, враховуючи тільки, що для ДУ2 К
![]() 1. [6]
1. [6]
![]() ,(4.19)
,(4.19)
де ![]() ;
;
![]() – опір резистора в колекторних ланцюгах транзисторів ДУ2;
– опір резистора в колекторних ланцюгах транзисторів ДУ2;
![]() – вхідний опір вихідного формувача;
– вхідний опір вихідного формувача;
![]() – ємність конденсаторів, які діють на вихідних ДУ2;
– ємність конденсаторів, які діють на вихідних ДУ2;
![]() – мінімальний діапазон зміни вихідної напруги ДУ2 від початкового значення (при
– мінімальний діапазон зміни вихідної напруги ДУ2 від початкового значення (при ![]() ) до струму, який потрібний для повного перемикання в навантаженні формувача.
) до струму, який потрібний для повного перемикання в навантаженні формувача.
Загальний час перемикання двох ДУ і ВФ без врахування інерційності транзисторів ДУ [6]:
![]() ,(4.20)
,(4.20)
де ![]() – коефіцієнт, що враховує
– коефіцієнт, що враховує ![]() через затримку
через затримку ![]() у ВФ.
у ВФ.
Прагнуть забезпечити ![]() , щоб ВФ не вносив додаткової затримки.
, щоб ВФ не вносив додаткової затримки.
Корисна потужність, що витрачається джерелом диференціального вхідного сигналу на перемикання ДУ1 [6]:
![]() .(4.21)
.(4.21)
Вираз для енергетичного порогу чутливості компаратора, використовуючи (4.18) – (4.21), і враховуючи, що ![]() , набуває вигляду:
, набуває вигляду:
![]()
![]() (4.22)
(4.22)
Провівши заміну ![]() в першому доданку, та
в першому доданку, та ![]() у другому доданку виразу (4.22) в квадратних дужках, можна розрахувати, що перший і другий доданки мають мінімуми, рівні відповідно [6]:
у другому доданку виразу (4.22) в квадратних дужках, можна розрахувати, що перший і другий доданки мають мінімуми, рівні відповідно [6]:
![]() та
та ![]() при
при
М =1,3 і N =1,7.(4.23)
Таким чином, при виконанні (4.23) досягається мінімум А
В
, що залежить від відношення струмів ![]() , а не від їх абсолютних величин [6]:
, а не від їх абсолютних величин [6]:
![]() ,(4.24)
,(4.24)
де ![]() .
.
Гранично досяжне мінімальне значення ![]() при
при ![]() та
та ![]() [6]:
[6]:
![]() .(4.25)
.(4.25)
Для сучасної технології виготовлення компараторів з ізоляцією елементів р
-
n
переходом типовими значеннями є ![]() =100,
=100, ![]() =5 пФ
=5 пФ ![]() = 5 мВ. Враховуючи, що
= 5 мВ. Враховуючи, що ![]() = 5 мВ, тобто К
= 5 мВ, тобто К
![]() 0,1, з (4.25) одержимо
0,1, з (4.25) одержимо ![]()
![]()
![]() Дж. Вираз (4.25) визначає мінімально досяжне значення
Дж. Вираз (4.25) визначає мінімально досяжне значення ![]() і показує, що при сучасній технології неможливо отримати в компараторі з ДУ
на вході поєднання вхідного струму
і показує, що при сучасній технології неможливо отримати в компараторі з ДУ
на вході поєднання вхідного струму ![]() і швидкодії
і швидкодії ![]() краще, ніж дає нерівність:
краще, ніж дає нерівність: ![]() .
.
Коефіцієнт підсилення, що забезпечується двома ДУ, отримаємо з умови (4.21) оптимальності параметрів ДУ1 і ДУ2:
![]() .(4.26)
.(4.26)
Енергія, що витрачається джерелом на перемикання двох ДУ в компараторі:
![]() .
.
Підставивши (4.18) – (4.20) в останній вираз для ![]() та провівши заміни, аналогічні використаним для виразу (4.22), знаходимо, що при виконанні (4.23)
та провівши заміни, аналогічні використаним для виразу (4.22), знаходимо, що при виконанні (4.23) ![]() також має мінімум:
також має мінімум:
![]() ,(4.27)
,(4.27)
де ![]() .
.
Диференціюючи вираз (4.27) по ![]() та прирівнюючи похідну до нуля, знаходимо, що при
та прирівнюючи похідну до нуля, знаходимо, що при ![]() виходить мінімально досяжне значення енергії
виходить мінімально досяжне значення енергії ![]() , рівне [6]:
, рівне [6]:
![]() .
.
Наприклад, якщо розробляється компаратор, у якого Б
= 1, С
1
![]() С
2
= 5 пФ,
С
2
= 5 пФ, ![]() = 3 В, λ < 1, то з рівняння
= 3 В, λ < 1, то з рівняння ![]() , отримаємо, що швидкодія двох каскадів
, отримаємо, що швидкодія двох каскадів ![]() =40 не тільки за умови, що сумарний струм через обидва ДУ буде не менше 2,5 мА.
=40 не тільки за умови, що сумарний струм через обидва ДУ буде не менше 2,5 мА.
Очевидно, що компаратор буде тим краще, чим ближчі відносини ![]() та
та ![]() до одиниці, а їх сума до двох.
до одиниці, а їх сума до двох.
Для визначення умов, при виконанні яких величини ![]() і
і ![]() однаково близькі до своїх граничних значень, введемо умовний критерій переваги
однаково близькі до своїх граничних значень, введемо умовний критерій переваги ![]() .
.
Максимум ![]() знайдений диференціюванням
знайдений диференціюванням ![]() по
по ![]() і прирівнюванням похідної до нуля, досягається при [6]:
і прирівнюванням похідної до нуля, досягається при [6]:![]()
![]() .(4.28)
.(4.28)
Залежності ![]() та
та ![]() від
від ![]() приведені на рис. 4.4 [6]. Таким чином, компаратор з ДУ на виході матиме близькі до граничних значень енергії
приведені на рис. 4.4 [6]. Таким чином, компаратор з ДУ на виході матиме близькі до граничних значень енергії ![]() і
і ![]() , якщо режим роботи і параметри елементів його каскадів вибрані відповідно до виразів (4.23) і (4.28).
, якщо режим роботи і параметри елементів його каскадів вибрані відповідно до виразів (4.23) і (4.28).
Включення емітер них повторювачів (ЕП) на вході ДУ1, що використовується в презиційних компараторах, не являється, як може здатися, кардинальним способом зменшення корисної енергії А В без збільшення А П . проте ЕП дозволяють значно зменшити повну енергію, що витрачається джерелом сигналу, за рахунок включення дії струму перезаряду ємності колектор-база транзистором ДУ1 у вхідних ланцюгах компаратора. Хоча ефективності використання енергії вхідного сигналу в компараторах з ЕП і без них приблизно однакові, але абсолютне значення енергії, що витрачається на перезаряд вхідної місткості в компараторі з ЕП, більш ніж на порядок менше на великі струмові сигнали.
![]()
Рисунок 4.4 – Графік залежності ![]() та
та ![]() від
від ![]()
Залежності порогової і питомої енергії диференціального підсилювача від коефіцієнта підсилення:
1. Т = 125ºС;
2. Т = -55…+125ºС;
3. Т = 25ºС;
4. Т ≤ 25ºС.
Використовуючи, вище приведене, неважко обчислити ![]() та
та ![]() для ДУ1 (перше співпадає з виразом (4.25)).
для ДУ1 (перше співпадає з виразом (4.25)).
![]() ,(4.29)
,(4.29)
![]() .(4.30)
.(4.30)
Включення ЕП на вході ДУ1 збільшує затримку його перемикання ![]() не менше ніж на
не менше ніж на
![]() ,(4.31)
,(4.31)
де ![]() – ємність, що діє в емітерному ланцюзі транзистора ЕП;
– ємність, що діє в емітерному ланцюзі транзистора ЕП;
![]() – струм в ЕП.
– струм в ЕП.
Враховуючи, що в цьому випадку, коли відносні зміни мінімумів порогової та питомої енергії залежно від параметрів і режимів роботи каскадів компараторів з ДУ і ЕП на вході:
![]() , (від двох ЕП)
, (від двох ЕП)
Для ДУ1 та ЕП на вході отримаємо:
![]() ;
;
![]() .
.
де ![]() , якщо
, якщо ![]() , оскільки значення
, оскільки значення ![]() , яке діє на вході ДУ1, в цьому випадку зменшується в 2 рази, і
, яке діє на вході ДУ1, в цьому випадку зменшується в 2 рази, і ![]() , якщо
, якщо ![]() .
.
Залежності ![]() та
та ![]() для ДУ1 і ДУ1 з ЕП на вході, отримані при
для ДУ1 і ДУ1 з ЕП на вході, отримані при ![]()
![]() = 100, приведені на рис. 4.6 [6].
= 100, приведені на рис. 4.6 [6].
Неважко обчислити з рівняння:
![]() ,
,
що мінімально досяжне значення ![]() рівне
рівне ![]() , досягається при:
, досягається при:
![]()
![]() .(4.32)
.(4.32)
Оптимальне значення ![]() при виконанні (4.32) рівне:
при виконанні (4.32) рівне:
![]() .
.
Граничне значення ![]() при
при ![]() і рівне
і рівне
![]() .
.
![]()
Рисунок 4.5 – Графіки залежності ![]() та
та ![]() для ДУ1 і ДУ1 з ЕП на вході
для ДУ1 і ДУ1 з ЕП на вході
Проте останнє досягається за рахунок збільшення ![]() до величини 100
до величини 100![]() (див. рис.4.5). Включення на вході ДУ1 ланцюгів, компенсуючи струм І
вх
, при технологічному розкиді (10…20٪) параметрів елементів ДУ1 в кращому разі дозволяє зменшити І
вх
в 5 разів, а отже, і досягти
(див. рис.4.5). Включення на вході ДУ1 ланцюгів, компенсуючи струм І
вх
, при технологічному розкиді (10…20٪) параметрів елементів ДУ1 в кращому разі дозволяє зменшити І
вх
в 5 разів, а отже, і досягти ![]() при незначному збільшенні А
П П
в порівнянні із звичайним ДУ.
при незначному збільшенні А
П П
в порівнянні із звичайним ДУ.
Після порівняння сигналу з ідеальним в компараторі напруги і перетворення його в цифрову послідовність, сигнал поступає на схему управління та комутатор. В даній схемі комутатор та схема управління виконані на основі польових транзисторів.
На підставі вище викладеного можна запропонувати простий метод розрахунку комутатора аналогових сигналів на ПТ:
1. Вибирається структура комутатора на підставі початкових даних: числа каналів, вхідного опору датчиків, допустимої погрішності, частотного і динамічного діапазонів комутованих аналогових сигналів.
У багатоступінчатих комутаторах погрішність, обумовлена взаємним впливом каналів, спостерігається у меншій мірі, ніж в одноступінчатому. При значному числі каналів багатоступінчата структура виявляється більш швидкодійною, за рахунок зменшення вихідної ємності комутатора. Крім того, багатоступінчата структура володіє меншою погрішністю перед одноступінчатою у разі значного опору датчиків.
Одноступінчата структура вимагає меншого числа ключів і в основному використовується при незначному числі каналів (звичайно не більше 10).
2. Вибирається тип польового транзистора, що працює як ключ.
3. Вибирається схема управління аналоговим ключем.
4. Складається еквівалентна схема комутатора і на підставі її аналізу знаходяться статична і динамічна погрішності комутатора.
5. Знаходяться всі параметри аналогового ключа, які вносять свій внесок в погрішність комутатора при передачі сигналу.
Необхідно спроектувати і розрахувати електронний комутатор, який підключає виходи компараторів напруги до входу суматора.
- число каналів – 4;
- частотний спектр вхідного сигналу 0,5-200 Гц;
- амплітуда комутованого сигналу ±3 В;
- погрішність передачі сигналу < 0,5٪;
- вихідний опір біопідсилювачів 2 кОм;
- опір навантаження (АЦП) 1 МОм;
- діапазон робочих температур 10…40ºС.
1. Визначимо частоту опитування каналів комутатора. За теоремою Котєльнікова частота запиту f
п
повинна перевищувати максимальну частоту спектру сигналу F
В
, як мінімум в 2 рази. Практично, це значення береться звичайно в 5-10 разів більше. Звідси, частота запиту одного каналу f
п
= 5F
В
= = 5![]() 200 =1000 Гц. Частота запиту 5 каналів f
п
= 5 кГц.
200 =1000 Гц. Частота запиту 5 каналів f
п
= 5 кГц.
2. Оскільки число каналів незначне, вибір зупиняється на одноступінчатій структурі комутатора.
3. Обираємо як ключ – польовий транзистор КП103Ж, що має наступні параметри:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Подальший розрахунок проводимо як для найгіршого випадку.
4. Визначаємо необхідну напругу замикання для обраного типу транзистора (без врахування вхідного сигналу) [6]:
![]() =
=
=![]() ,
,
де ![]() = (2÷3 мВ/ºС)ΔТº.
= (2÷3 мВ/ºС)ΔТº.
З врахуванням вхідного сигналу управляюча напруга, необхідна для повного замикання ПТ, визначається з виразу:
![]() .
.
Оскільки допустима напруга замикання зверху обмежується максимально допустимою напругою на затворі рівною 15 В, то ![]() необхідно обирати з проміжку:
необхідно обирати з проміжку:
5,8 В < ![]() < 15 В.
< 15 В.
Це значення уточнюється при розрахунку режиму роботи транзистора, який управляє ланцюгами затвору.
5. Вибираємо схему управління з буферним підсилювачем. При цьому з’являється можливість розділити ланцюги видачі сигналу (високоомний вихід комутатора) і зчитування (низькоомний вихід комутатора).
6. Визначимо статичну погрішність комутатора, що розраховується, уявляючи його у вигляді еквівалентної схеми, зображеної на рис. 4.6 [6].
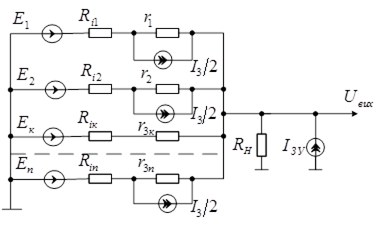
Рисунок 4.6 – Еквівалентна схема комутатора
Вважатимемо, що в даний момент часу ввімкнений перший канал.
В цьому випадку вихідна напруга першого каскаду, який підключений до навантаження, викличе в ланцюзі струм ![]() , який створює на опорах
, який створює на опорах ![]() падіння напруги:
падіння напруги:
![]()
Напруги датчиків ![]() ,
, ![]() ,
, ![]() викликають струми, що протікають через опори замкнутих ПТ і опори
викликають струми, що протікають через опори замкнутих ПТ і опори ![]() , створюючи на останніх додаткове падіння напруги:
, створюючи на останніх додаткове падіння напруги:
![]() ,
,
де N = 5 – число каналів комутатора.
Зворотні струми затворів замкнутих транзисторів, протікаючи по тому ж ланцюгу, створюють додаткову напругу:
![]() .
.
Окрім перерахованих вище погрішностей при передачі сигналу існує одна, яка обумовлена струмом БУ:
![]() .
.
Оскільки комутатор призначений для роботи в інтервалі температур 10-40ºС, необхідно врахувати, що струми затворів ПТ подвоюються на кожні 10ºС, тобто в даному випадку струми затворів слід збільшити в 10 разів.
Сумарна статична погрішність комутатора виражається наступним чином:
![]()
7. Визначимо бракуючи для обчислення статичної погрішності параметри ключа на ПТ.
Опір каналу відкритого транзистора визначається з виразу [6]:
![]() .(4.33)
.(4.33)
![]() = 1/0,7 = 1,43 кОм.
= 1/0,7 = 1,43 кОм.
Струм стоку замкнутого транзистора:
![]() .
.
Вхідний струм буферного підсилювача:
![]() .
.
Підставляючи знайдені значення у вираз сумарної статичної погрішності, отримуємо:

Таким чином, максимальна погрішність при передачі сигналу складе 0,38٪, що менше за допустиму, тому вибір структури комутатора і типу ПТ зроблений правильно, і можна продовжувати розрахунок елементів комутатора.
8. Знайдемо повну ємність затвору [6]
![]() ,
,
де ![]() – ємність діода.
– ємність діода.
9. Час опитування одного каналу:
![]() .
.
10. При замиканні ключа ємність затвору перезаряджається з постійною часу ![]() , (
, (![]() – вихідний опір компараторів напруги). При цьому опір каналу змінюватиметься відповідно до формули:
– вихідний опір компараторів напруги). При цьому опір каналу змінюватиметься відповідно до формули:
![]() .
.
Вважаючи, що опір каналу досягає свого сталого значення за час рівний 3-5![]() , можна визначити допустиме значення
, можна визначити допустиме значення ![]() :
:
![]() ,
,
де ![]() – допустимий час встановлення прямого опору каналу (приймемо
– допустимий час встановлення прямого опору каналу (приймемо ![]() =0,4Т
К
).
=0,4Т
К
).
11. Напругу живлення управляючого какаду обираємо із вже знайденого раніше проміжку допустимих напруг на затворі (5,8 В ![]() 15 В). приймемо стандартне значення Е
К
= 12,6 В.
15 В). приймемо стандартне значення Е
К
= 12,6 В.
12. Струм, що спожитий від буферного какаду,
![]() .
.
13. Швидкодія загасання перехідних процесів на вході комутатора визначається постійною часу вихідної шини ![]() [6]:
[6]:
![]() ,(4.34)
,(4.34)
де ![]() ;
;
![]() – резистор колекторного навантаження біполярного ключового транзистора в схемі управління, причому його опір звичайно береться рівним 5÷10 кОм. Приймаємо
– резистор колекторного навантаження біполярного ключового транзистора в схемі управління, причому його опір звичайно береться рівним 5÷10 кОм. Приймаємо ![]() = 6,2 кОм. Тоді:
= 6,2 кОм. Тоді:
![]() .
.
Оскільки навантаженням комутатора служить перетворювач "аналог-код", то для включення помилки через перехідні процеси і час встановлення опору вимірювання аналогового сигналу (перетворення в код) необхідно починати через час:
![]() .
.
Далі сигнал одночасно зчитується на вхід суматора, в якому в пасивному колі неінвертуючого входу відбувається підсумовування. Потім сумарна напруга підсилюється в ![]() разів. Отже, вихідна напруга:
разів. Отже, вихідна напруга:
![]() ,(4.35)
,(4.35)
де ![]() =
= ![]() ;
;
j – ваговий коефіцієнт;
![]() – коефіцієнт передачі j-ї зовнішньої напруги на неінвертуючому вході корпусу пристрою.
– коефіцієнт передачі j-ї зовнішньої напруги на неінвертуючому вході корпусу пристрою.
В неінвертуючому суматорі джерела сигналів не розв’язані. Внаслідок цього кожен опір Rj
впливає на всі вагові коефіцієнти. Отже зміна кількості входів або величини будь-якого опору Rj
призводить до необхідності пере обчислення коефіцієнтів ![]() . Далі сигнал поступає в НЧ тракт.
. Далі сигнал поступає в НЧ тракт.
5. ОБГРУНТУВАННЯ ІНЖЕНЕРНО-ТЕХНІЧНИХ ЗАСОБІВ ЩОДО ОХОРОНИ ПРАЦІ
Освітлення
Штучне освітлення передбачається у всіх приміщеннях, де недостатньо природного світла, а також для освітлення приміщень в темний період доби. Норми штучного та природного освітлення приведені в ДБН В.2.5 – 28 – 2006 “Естественное и искусственное освещение” (замість СНиП 11-4-79), який введений в дію 1.10.2006р.
Електричний струм
Виробничі приміщення РРС повинні відповідати вимогам діючих будівельних норм та правил, відомчих норм технологічного проектування. Основні положення про безпечну експлуатацію електроустановок викладені у Законі України “Про охорону праці” нормативно-правових актах: “Правила та заходи безпеки під час експлуатації електроустановок”, “Правил техніки безпеки при експлуатації електроустановок споживачів” тощо.
В приміщеннях з електроустановками до 1 кВ допускається застосовувати ізольовані та неізольовані струмоведучі частини без захисту від торкання. При цьому доступні для торкання частини повинні бути розміщені так, щоб нормальне обслуговування не було з небезпекою торкання до них. При напрузі вище 1 кВ товщина металічних огороджувальних та закриваючих пристроїв повинна бути не менше 1 мм.
В приміщеннях повинні знаходитися в необхідній кількості діелектричні засоби захисту. Для їх зберігання потрібно використовувати спеціальні шафи, полиці, стелажі і т.д.
Біля обладнання з висувними блоками і відкриваючими дверцятами, біля силових щитів, шаф, електроагрегатів та силових машин повинні бути проложені діелектричні килимки шириною не менше 0,7 м і довжиною, рівною довжині обладнання.
В приміщеннях на видному місці повинні знаходитися аптечки першої допомоги, в якій повинен знаходитися список медикаментів, що знаходяться в аптечці, та коротка інструкція до них.
У виробничих приміщеннях з підвищеною небезпекою та особливо небезпечних повинна бути проложена автономна електромережа з номінальною напругою не більше 42 В, яка призначена для підключення електроінструментів.
Розетки з напругою до 42 В по своєму конструктивному виконанню в частині штепсельного з’єднання повинні виключати можливість включення призначених для них вилок в розетки напругою 220 В, розетки напругою 220 В повинні бути з третім заземлюючим контактом.
Заземлюючі захисні провідники повинні мати покриття, яке захищає від корозії.
Згідно з ГОСТ 12.1.019-79 електробезпека повинна забезпечуватись конструкцією електроустановки, технічними засобами і пристроями захисту, організаційними та технічними заходами. [14-15]
Індивідуальні технічні засоби захисту:
– ізольовані (килимки, доріжки, підставки, діелектричні рукавиці, взуття, ізольовані ручки, покажчики напруги);
– огороджувальні (переносні попереджувальні плакати, заземлення, огорожі);
– допоміжні (окуляри, протигази, рукавиці, спецодяг, страху вальні канати, запобіжні пояси).
Засоби захисту:
– електрична ізоляція;
– огороджувальні пристрої;
– блокування;
– розміщення струмопровідних частин обладнання на недосяжній висоті;
– малі напруги;
– захисне заземлення;
– занулення;
– захисне вимкнення.
Захисне заземлення
Захисне заземлення та занулення повинне забезпечувати захист людей від ураження електричним струмом при торканні до металічних не струмоведучих частин, які можуть знаходитися під напругою в результаті пошкодження ізоляції. Захисне заземлення слід виконувати електричним з’єднанням металічних частин електроустановок із землею.
Заземлення та занулення електроустановок слід виконувати [17]:
- при напрузі 380 В і вище змінного струму та 440 В і вище постійного струму – на всіх електроустановках РРС;
- при номінальній напрузі вище 42 В, але нижче 380 В змінного струму та 110 В, але нижче 440 В постійного струму – тільки в приміщеннях з підвищеною небезпекою, особливо небезпечних та в зовнішніх установках.
У виробничих приміщеннях РРС для забезпечення безпеки людей повинні бути споруджені заземлюючі пристрої, до яких підключаються металічні конструкції будівель, споруджень, обладнання та вимірювальні пристрої.
В якості основної та допоміжної міри захисту, якщо безпека не може бути забезпечена шляхом пристрою заземлення, рекомендується застосовувати захисне відключення
Нейтраль обмоток трансформаторів силової трансформаторної підстанції та власної електростанції, яка живить РРС, повинна бути приєднана до захисного або робочо-захисного заземлюючого пристрою. При цьому заземлюючий пристрій для РРС та для трансформаторної підстанції може бути загальним, якщо трансформаторна підстанція розміщена на території цього підприємства.
Опір заземлюючого пристрою, до якого приєднані нейтралі обмоток генераторів та трансформаторів, при питомому опорі ґрунту до 100 Ом∙м, не повинен бути більше:
- 2 Ом – установки напругою 660/380 В;
- 4 Ом – установки напругою 380/220 В;
- 8 Ом – установки напругою 220/127 В.
Цей опір повинен бети забезпечений з урахуванням використання природних заземлювачів (проложені під землею металічні труби, металічні конструкції, арматура споруд і т.д.). При питомому опорі ґрунту більше 100 Ом∙м допускається підвищити значення опору заземлюючого пристрою в ρ/100 раз, але не більше ніж в 10 раз.
Персонал, який обслуговує електроустановки РРС, повинен бути забезпечений необхідними засобами захисту. Засоби захисту повинні знаходитися в якості інвентарних в приміщеннях електроустановок, а також видаватися для індивідуального використання.
В підрозділах підприємств та організацій галузі та споживачів електроенергії необхідно вести журнали обліку та змісту засобів захисту. Наявність та стан засобів захисту повинен перевірятися періодично оглядом, але не менше 1 разу на 6 місяців особою, яка відповідає за їх станом, з записом результатів огляду в журнал. Засоби за захисту, видані в індивідуальне використання, також повинні бути зареєстровані в журналі.
Електромагнітне випромінювання
Негативна дія ЕМВ на організм людини обумовлена електричним полем електроустановок промислової частоти. Для захисту обслуговуючого персоналу від дії електромагнітних полів високочастотні установки повинні бути обладнані так, щоб на робочих місцях та на місцях можливого знаходження персоналу, пов’язаного професійно з дією електромагнітного поля (ЕМП), гранично допустимі значення щільності потоку енергії в діапазоні частот 300МГц – 300ГГц в залежності від часу їх дії не повинні перевищувати значень, приведених в таблиці 5.1 (ГОСТ 12.1.006-84 “Електромагнітні поля радіочастот. Загальні вимоги безпеки”). [19]
Таблиця 5.1 – Гранично допустима щільності потоку енергії
| Щільність потоку енергії, мкВт/кв. см |
400 |
200 |
100 |
67 |
50 |
40 |
33 |
29 |
25 |
22 |
20 |
18 |
16 |
| Допустимий час перебування людини |
0,5 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
![]()
На робочих місцях, в зоні обслуговування високочастотних установок необхідно не менше 1 разу на рік проводити вимірювання інтенсивності випромінювання. Вимірювання інтенсивності випромінювання повинні також проводитись при вводі в дію нових, при реконструкції діючих НВЧ-установок, після ремонтних робіт, які можуть вплинути на інтенсивність випромінювання. Місця, де знаходиться перевищення гранично допустимих значень щільності потоку енергії, повинні бути позначені попереджувальними плакатами.
Заходи захисту від дії ЕМВ:
– захист часом – обмеження перебування людини у ЕМП;
– захист відстанню проводиться, якщо не можна послабити інтенсивність опромінення у певній зоні іншими способами;
– зменшення потужності випромінювання безпосередньо в джерелі досягається використанням спеціальних пристроїв (еквівалентів антен та навантаження), які повністю поглинають або знижують енергію ЕМВ, що передається від генератора до випромінюючого пристрою;
– екранування джерел випромінювання використовується для зниження інтенсивності на робочому місці;
– засоби індивідуального захисту – костюми, халати, комбінезони з металізованої тканини з виводом на заземлення. Для захисту очей використовують захисні окуляри.
Мікроклімат
Температура повітря 18-20°С (14-18°С) є оптимальною для роботи. Захист від дії низьких температур – опалення, при високих – вентиляція з охолодженням (кондиціонери).
Вологість повітря повинна становити 40-60%.
Швидкість повітря 0,2 м/с.
Атмосферний тиск – нормальний 760 мм рт. ст. [20, 23]
Пожежна безпека
Відповідальним за пожежну безпеку є керівник підприємства (установи). Він зобов’язаний організувати пожежну охорону, виконувати протипожежні заходи, стежити за дотриманням протипожежного режиму та наявність протипожежних засобів тощо.
Завданням пожежної охорони є:
– пожежна профілактика;
– недопущення поширення пожеж та їх локалізація;
– евакуація людей та матеріальних цінностей під час пожеж.
Визначимо тип та кількість вогнегасників, які повинні знаходитися на РРС, а також категорію приміщення та клас пожежі.
Кількість вогнегасників розраховуємо за формулою [11]:
![]()
![]() (5.1)
(5.1)
де: N – кількість вогнегасників;
S M – площа приміщення, м2 ;
400 – гранична захищена площа, м2 .
Оскільки обладнання знаходиться під напругою застосовують вуглекислотний вогнегасник ОУ-2, або ОУ-5.
Категорія приміщення – категорія В пожежонебезпечна (горючі, важко горючі рідини, тверді горючі та важко горючі речовини та матеріали, здатні горіти при взаємодії з водою, киснем, один з одним).
Клас пожежі – клас А, підклас І (горіння твердих речовин, яке супроводжується тлінням).
Результати розрахунків занесені до протоколу (таблиця 5.2).
Таблиця 5.2 – Протокол розрахунків
| Категорія приміщення |
Клас пожежі |
Гранична захищена площа |
Марка вогнегасника, місткість |
Кількість вогнегасників |
| Категорія В (пожежонебезпечна) |
Клас А підкл.І |
70 м2 |
ОУ-2, ОУ-5 |
1 |
Огляд вогнегасників потрібно проводити один раз на рік або у випадку їх використання для гасіння пожежі. Огляд включає перевірку наявності:
– інвентарних номерів за прийнятою системою нумерації;
– пломб на пристроях ручного пуску;
– бирок та маркування на корпусі;
– червоного сигнального забарвлення згідно з державними стандартами;
– запобіжних пристроїв для убезпечення на випадок перевищення тиску у корпусі;
– блокування пристроїв на зарядно-пускових пристроях;
Крім того, перевіряється вага вогнегасник речовин у вогнегаснику.
Зарядження та перезарядження вогнегасників виконується відповідно до інструкції з експлуатації.
Вогнегасник слід розміщувати у легкодоступних та помітних місцях, де виключається пряме потрапляння сонячних променів і безпосередній вплив опалювальних та нагрівальних приладів. [24]
При дотриманні існуючих норм та правил з охорони праці при експлуатації РРС можна знизити ступінь травматизму до мінімуму.
6. ТЕХНІКО-ЕКОНОМІЧНЕ ОБГРУНТУВАННЯ
Матеріальною основою будь-якого виробництва є засоби виробництва, які складаються із засобів та предметів праці, що беруть участь у створенні продукту. Але з огляду на відмінність у характері функціонування у процесі виробництва та способі перенесення вартості на створюваний продукт засоби праці набирають економічної форми необоротних активів, а предмети праці – оборотних.
Разом з тим в умовах існування товарно-грошових відносин матеріальні засоби підприємств виражаються не лише в натуральній, а й у вартісній формі.
Отже, предмети праці у грошовій оцінці становлять виробничі оборотні фонди. До них на промислових підприємствах належать сировина, матеріали, паливо, запасні частини, інші матеріальні цінності.
Оборотні активи повинні будуватися на таких принципах:
· створенні мінімального обсягу оборотних активів, що забезпечує неперервність процесу виробництва та обігу, а також їх ефективне використання;
· раціональному розміщенні наявних оборотних активів за сферами відтворювального процесу в межах підприємства;
· формуванні та поповненні оборотних активів за рахунок власних та позикових джерел залежно від обсягів виробництва;
· створенні фінансових резервів;
· контролі за зберіганням та ефективним використанням оборотних активів.
У дипломній роботі представлена схема ЧМ-демодулятора, що поєднує в собі властивості, як широкосмугових так і вузькосмугових детекторів. Вартість даного пристрою буде більшою в порівнянні з уже існуючими схемами демодуляторів ЧМ сигналів. Зростання витрат є припустимим, так як визначені лімітні (межові) ціни, за яких розробка буде доцільною. Проте потрібно оцінювати не вартість, а значення даного пристрою.
Припустимо, що для початкового періоду виробництва вже точно відомі покупці, є попередня домовленість з ними про майбутній продаж. Розрахуємо умови досягнення беззбитковості проекту за формулою [9]:
![]() ,(6.1)
,(6.1)
де К – кількість виготовлених товарів при якій буде досягнута беззбитковість проекту, шт.;
УПВ – сума умовно-постійних витрат, грн. Сюди входить:
1. вся сума отриманих і необхідних кредитів, а також виплата процентів по них у розрахунку на рік;
2. сума накладних витрат в цілому;
3. сума амортизаційних відрахувань по основному обладнанню.
Ц – ціна за одиницю товару, грн.
УЗПВ – сума умовно-змінних витрат необхідних для виготовлення одиниці товару, грн. сюди входить:
1. витрати на сировину, матеріали та комплектуючі пристрої;
2. витрати на електро- та теплоенергію, що використовуються у виробничих процесах;
3. витрати на оплату праці основного виробничого персоналу.
Якщо взяти УПВ близько 9000 грн., з яких 6000 грн. будуть направлені на кредит, 2500 грн. – накладні витрати, 500 грн. – амортизаційні відрахування. Ціна товару складає 80 грн.. Сума умовно-змінних витрат складає 50 грн. підставивши дані в (6.1) отримаємо:
![]() (шт.) – точка беззбитковості.
(шт.) – точка беззбитковості.
Тобто, потрібно виготовити 300 од. товару, перш ніж буде повністю відшкодована вся сума умовно-постійних витрат. Починаючи з 301 виробу виробництво почне приносити прибуток.
Схема ЧМ-демодулятора досить ефективна, так як є можливість збільшити коефіцієнт модуляції не погіршуючи співвідношення сигнал-перешкода на виході. Важливим є те, що для передачі сигналу забезпечується потрібна девіація частоти, причому це не впливає на лінійність амплітудно-частотної характеристики демодулятора. Завдяки чому підвищується завадостійкість системи з ЧМ-демодуляторами. Помилки у вимірі й установці вагових коефіцієнтів не гірше (15-20)% практично не знижують ефективність роботи демодуляторів.