| Скачать .docx |
Реферат: Расчет систем управления при случайных воздействиях
Министерство образования Республики Беларусь
Учреждение образования
«Белорусский государственный университет
информатики и радиоэлектроники»
Кафедра систем управления
А. A. Лобатый, Л.В. Русак, О.А. Чумаков
РАСЧЕТ СИСТЕМ УПРАВЛЕНИЯ ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
Конспект лекций
для студентов специальности
I-53 01 07 «Информационные технологии и управление
в технических системах»
дневной формы обучения
В 2-х частях
Часть 1
Минск 2006
УДК 681.5 (075.8)
ББК 32.965 я73
Л 68
Рецензент:
зав. кафедрой РЭС БГУИР,
канд. техн. наук, проф. Н.С. Образцов
Лобатый А.А.
Л 68 Расчет систем управления при случайных воздействиях: Конспект лекций для студ. спец. I-53 01 07 «Информационные технологии и управление в технических системах» дневн. формы обуч.: В 2 ч. Ч. 1 / А.А. Лобатый, Л.В. Русак, О.А. Чумаков. – Мн.: БГУИР, 2006.– 61 с.: ил.
ISBN 985-444-990-4 (ч.1)
В конспекте лекций рассмотрены вопросы статистического анализа и синтеза линейных и некоторых нелинейных систем автоматического управления. В первой части издания приведены основные статистические характеристики случайных сигналов, интегральное и спектральное уравнение связи выходных и входных сигналов, методы определения ошибок систем автоматического управления, обусловленных стационарными случайными сигналами; описана методика статистического синтеза систем автоматического управления при заданной структуре; методы исследования марковских случайных процессов случайной структуры.
УДК 681.5 (075.8)
ББК 32.965 я 73
ISBN 985-444-990-4 (ч.1) © Лобатый А.А., Русак Л.В., Чумаков О.А., 2006
ISBN 985-444-989-0 © БГУИР, 2006
Содержание
Введение ............................................................................................................. 5
1. Основные понятия и определения. 5
1.1. Значение и место учебной дисциплины.. 5
1.2. Основные понятия (из теории вероятностей)5
1.3. Вероятностные характеристики дискретных случайных величин. 8
1.4. Законы распределения случайных величин. 10
1.5. Типовые законы распределения непрерывных случайных величин. 12
1.6. Характеристические функции. 15
1.7. Векторные случайные величины.. 17
2.1. Понятие случайного процесса. 20
2.2. Вероятностные характеристики случайных процессов. 21
2.3. Стационарные случайные процессы.. 24
2.4. Выбросы стационарных случайных процессов. 25
3. Корреляционные функции случайных процессов. 30
3.1. Понятие корреляционной функции. 30
3.2. Операции над случайными функциями (процессами)34
3.3. Свойства корреляционных и взаимно корреляционных функций. 40
3.4. Экспериментальное определение корреляционных функций. 42
4. Спектральная плотность стационарных случайных процессов. 43
4.3. Корреляционные функции и спектральные плотности типовых стационарных процессов. 55
ВВЕДЕНИЕ
В связи с тем, что при работе систем автоматического управления в реальных условиях некоторые задающие и многие возмущающие воздействия могут быть описаны только статистически, применяют статистические методы анализа и синтеза автоматических систем. Эти методы позволяют произвести количественную оценку влияния различных случайных воздействий на качество управления и определить оптимальные структуру и параметры системы.
Статистические методы исследования автоматических систем являются важным разделом теории автоматического управления.
Благодаря трудам советских ученых А.Н. Колмогорова, А.Я. Хинчина, В.С. Пугачева, В.В. Солодовникова, а также работам зарубежных специалистов Н. Винера, К. Шеннона и др. разработана стройная теория случайных процессов и ее практические приложения.
Впервые задача статистического синтеза поставлена и решена в работах академика А.Н. Колмогорова, как задача экстраполяции и интерполяции стационарных случайных последовательностей. Позже Норберт Винер распространил эту теорию на непрерывные случайные процессы и предложил решение задачи определения оптимальной системы с постоянными параметрами, находящейся под влиянием случайных стационарных воздействий.
Задача Колмогорова – Винера была рассмотрена в частотной области Бодэ и Шенноном. Методика определения оптимальной передаточной функции описана и развита в работах В.В. Солодовникова. Методика синтеза оптимальных систем распространена В.С. Пугачевым и на линейные системы с переменными параметрами.
Развитию статистических методов анализа и синтеза систем автоматического управления посвящены работы И.Е. Казакова, А.С. Шаталова, Б.Г. Доступова, Н.А. Лившица, А.Н. Скляревича, А.А. Первозванского, К.А. Пупкова и др.
Разработка и внедрение в инженерную практику статистических методов исследования линейных и нелинейных систем автоматического управления явились одним из важнейших достижений в теории автоматического управления за последние 30 лет.
Методы линейной теории используют для исследования тех реальных автоматических систем, которые можно считать приближённо линейными; методы нелинейной теории – для исследования динамических свойств систем, содержащих существенные нелинейности.
1. Основные понятия и определения
В данном материале даётся введение в дисциплину “Расчёт систем управления при случайных воздействиях”, далее РСУ при СВ.
1.1. Значение и место учебной дисциплины
Дисциплина РСУ при СВ – часть технической кибернетики, куда входят ряд дисциплин, которые изучаются на факультете и в университете.
Что же такое кибернетика?
Кибернетика (от греческого kybernetike – искусство управления) – наука об управлении, связи и переработке информации. Основной объект исследования – так называемые кибернетические системы, рассматриваемые абстрактно, вне зависимости от их материальной природы.
Кибернетика как наука об управлении изучает общие свойства и законы, присущие различным системам управления. А так как в автоматическом и автоматизированном производстве задача управления является важнейшей, кибернетика стала, например, теоретической основой автоматизации производства.
Техническая же кибернетика – это отрасль науки, изучающая технические системы управления, используя идеи и методы кибернетики; научная основа автоматизации производства.
В основе дисциплины РСУ при СВ лежит статистическая динамика систем, а также – теория вероятностей, теория автоматического управления.
В то время, если в классической теории автоматического управления поведение систем исследовалось, как правило при определенных задающих и возмущающих воздействиях, таких как ступенчатое, импульсное, гармоническое и т.д., то в РСУ при СВ характер воздействия является случайным.
В качестве примеров систем, подверженным случайным воздействиям можно привести: радиолокационная станция, система управления летательным аппаратом и т.д.
1.2. Основные понятия (из теории вероятностей)
Ниже приведен ряд терминов, встречающихся в посвященной данной теме литературе.
Событие – результат опыта, т.е. такое явление, которое может произойти или не произойти.
В качестве примера можно привести:
Опыт 1 . Бросание монеты 1 раз.
Событие 1 – «Г» – появление герба.
Событие 2 – «Ц» – появление цифры.
W={Г, Ц} – пространство всех исходов опыта
Опыт 2 . Бросание игральной кости.
А
k
– появление k
очков (![]() )
)
W={A1, А2, А3, А4, А5, А6}
В таблице 1 приведена основная классификация событий.
Таблица 1.1
Основная классификация событий
| События | ||
| Случайные А,В,С,… (происходящие иногда) | Достоверные W (происходят всегда) |
Невозможные Ø (не происходят никогда) |
| События | |
| Несовместные (не могут появиться в одном опыте) |
Совместные (могут появиться в одном опыте) |
Частота события – число появлений события в одном опыте (1.1).
![]() (1.1)
(1.1)
где m – число появлений события; N – число опытов.
В теории вероятностей каждому событию A ставится в соответствие определенное число P (A ), которое называется вероятностью события A . Потребуем, чтобы эта вероятность удовлетворяла следующим аксиомам:
1) Вероятность любого события заключена между нулем и единицей 0≤P (A )≤1;
2) Вероятность достоверного события равна единице P (Ω)=1;
3) Вероятность невозможного события равна нулю P (Ø)=0;
4) Аксиома сложения: если A и B – несовместные события, то: P (A +B )= P (A )+ P (B );
5) Аксиома умножения ![]()
где ![]() – условная вероятность, т.е. вероятность события B
, определяемая при условии, что событие A
уже наступило.
– условная вероятность, т.е. вероятность события B
, определяемая при условии, что событие A
уже наступило.
Вероятность события P (A ) связана с частотой следующим образом:
![]() (1.2)
(1.2)
или
![]() . (1.3)
. (1.3)
Если событие A может наступить лишь при условии, что наступит одно из событий H 1 , H 2 , ..., Hn , образующих полную группу событий (обязательно не совместных), и называемых гипотезами, то P (A ) вычисляется как сумма произведений вероятности каждой гипотезы на вероятность события A при этой гипотезе. Формула полной вероятности имеет вид:
 , (1.4)
, (1.4)
где P (Hi ) – вероятность i -ой гипотезы.
Формула Байеса (теорема гипотез). Пусть имеется полная группа несовместных событий H1 , H2 , ..., Hn . Вероятности этих гипотез до опыта известны и равны соответственно P (H 1 ), P (H 2 ), ..., P (H n ). Произведен опыт, в результате которого наблюдается появление некоторого события A . Тогда вероятность гипотезы Hj в связи с появлением этого события следует пересчитать по формуле
 . (1.5)
. (1.5)
Случайная величина – такая величина, которая в результате опыта принимает то или иное значение, причем заранее не известно, какое.
Таблица 1.2
Типы случайных величин
| Случайные величины | ||||||||
| Непрерывные | Дискретные | Смешанного типа | ||||||
| Могут попасть в любую точку числовой оси | Значения величины разделены интервалами | Значения величины не всегда разделены интервалами и не равновероятны | ||||||
| Пример: расстояние от орудия до точки падения снаряда | Пример: Бросание игральной кости | Пример: стрельба по площадной цели | ||||||
 |
 |
 |
||||||
1.3. Вероятностные характеристики дискретных случайных величин
Для расчёта дискретной случайной величины необходимо иметь:
1) все возможные значения, которые она может принимать,
2) вероятность появления каждого из них.
Одной из простых характеристик определяющую случайную величину является среднее значение или математическое ожидание случайной величины.
 . (1.6)
. (1.6)
Основные свойства математического ожидания случайной величины следующие:
1. Для любых случайных величин среднее значение их суммы равно сумме средних значений этих величин:
![]() ; (1.7)
; (1.7)
2. Среднее значение произведения случайных величин, независимых друг от друга, равно произведению средних значений этих величин:
![]() . (1.8)
. (1.8)
Последняя формула не распространяется на общий случай любых случайных величин. В виде обобщения среднего значения введено понятие момента порядка m случайной величины x .
 (1.9)
(1.9)
Момент первого порядка есть среднее значение (математическое ожидание) случайной величины. Момент второго порядка – это средний квадрат случайной величины.
 . (1.10)
. (1.10)
Часто используют так называемое среднеквадратичное значение случайной величины, представляющее собой корень квадратный из среднего квадрата случайной величины:
![]() . (1.11)
. (1.11)
Иногда рассматриваются центрированное значение случайной величины ![]()
![]() , где
, где ![]() – среднее значение. Тогда можно ввести понятие центрального момента m
-го порядка.
– среднее значение. Тогда можно ввести понятие центрального момента m
-го порядка.
 . (1.12)
. (1.12)
Из формулы следует, что центральный момент первого порядка всегда равен нулю.
Обратимся теперь к характеристикам рассеяния дискретной случайной величины.
Если x
– случайная величина, а ![]() – среднее значение этой величины, то величина
– среднее значение этой величины, то величина ![]() есть отклонение случайной величины от ее среднего значения. Это отклонение является случайной величиной, как и сама величина x
.
есть отклонение случайной величины от ее среднего значения. Это отклонение является случайной величиной, как и сама величина x
.
Средним отклонением D называется среднее значение (математическое ожидание) абсолютной величины отклонения, т.е.
 . (1.13)
. (1.13)
Дисперсией называется средний квадрат отклонения случайной величины от её среднего значения. Она совпадает с центральным моментом второго порядка
 . (1.14)
. (1.14)
Дисперсия может быть только положительным числом: ![]() .
.
Корень квадратный из дисперсии называется среднеквадратичным отклонением случайной величины:
![]() . (1.15)
. (1.15)
Укажем простейшие свойства среднеквадратичных отклонений.
1. При сложении независимых случайных величин
![]() (1.16)
(1.16)
дисперсии складываются:
![]() . (1.17)
. (1.17)
Поэтому среднеквадратичное отклонение суммы независимых случайных величин
![]() . (1.18)
. (1.18)
Эта формула часто применяется в вычислительной технике и автоматики для вычисления среднего квадрата ошибки.
2. Пусть имеется n случайных величин
![]()
с одинаковыми средними значениями ![]() и с одинаковыми законами распределения. Тогда их среднеарифметическое
и с одинаковыми законами распределения. Тогда их среднеарифметическое
![]() (1.19)
(1.19)
тоже будет случайной величиной с тем же самым средним значением ![]() , но среднеквадратичное отклонение его будет в
, но среднеквадратичное отклонение его будет в ![]() раз меньше, чем для каждой из составляющих (в случае независимых случайных величин):
раз меньше, чем для каждой из составляющих (в случае независимых случайных величин):
 (1.20)
(1.20)
Например, если производится n измерений одной и той же физической величины, то их среднее арифметическое, хотя является случайной величиной, но всегда надежнее (имеет меньшее среднеквадратичное отклонение), чем каждое измерение в отдельности. Здесь случайные ошибки измерения в известной мере компенсируются. Но надо помнить, что систематические ошибки приборов при этом остаются в полной мере в составе среднего арифметического и никакой массовостью измерений скомпенсированы быть не могут.
3. Для n
случайных величин, независимых, имеющих одно и то же среднеквадратичное значения ![]() , среднее арифметическое будет при достаточно большом
, среднее арифметическое будет при достаточно большом ![]() как угодно мало отличатся от среднего значения
как угодно мало отличатся от среднего значения ![]() (с вероятностью, как угодно близкой к единице). Замечание в скобках означает, что это практически достоверно, но не абсолютно, потому что среднее арифметическое есть все же случайная величина. Таким образом, при большом n
и указанных условиях
(с вероятностью, как угодно близкой к единице). Замечание в скобках означает, что это практически достоверно, но не абсолютно, потому что среднее арифметическое есть все же случайная величина. Таким образом, при большом n
и указанных условиях
![]() при
при ![]() . (1.21)
. (1.21)
1.4. Законы распределения случайных величин
Закон распределения случайной величины – некоторая функция, устанавливающая взаимнооднозначное соответствие между возможными значениями случайных величин и вероятностями этих значений.

Рис. 1.1. Формы закона распределения случайных величин
Таблица 1.3
Табличная форма закона распределения
| Значение величины | x 1 | x 2 | … | xn |
| Вероятность значения | P 1 | P 2 | … | Pn |

Рис. 1.2. Графическая форма – многоугольник распределения
Данные формы применимы только для дискретных случайных величин.
Функция распределения – вероятность того, что случайная величина X примет значение меньше некоторого фиксированного x .
![]() , (1.22)
, (1.22)
где F (x ) – неубывающая функция аргумента x .

Рис. 1.3. Попадание случайной величина на числовую ось

Рис. 1.4. Функция распределения для дискретных случайных
величин (непрерывная слева)

Рис. 1.5. Функция распределения для непрерывных
случайных величин
Плотность вероятности для одномерной случайной величины – предел отношения вероятности попадания случайной величины X на отрезок ∆x к длине этого отрезка, когда ∆x стремится к нулю.
![]() . (1.23)
. (1.23)
Плотность вероятности имеет следующие свойства:
1. ![]() ;
;
2.  .
.
1.5. Типовые законы распределения непрерывных случайных величин
1.5.1.Показательное распределение
Плотность вероятности для показательного закона распределения имеет вид:
![]() , (1.24)
, (1.24)
где x >0 и λ>0.
Функция распределения:
 . (1.25)
. (1.25)
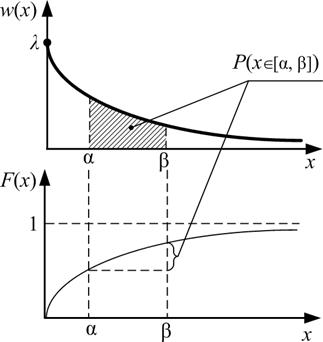
Рис. 1.6. Плотность вероятности и функция распределения
показательного закона распределения
Математическое ожидание, дисперсия и среднеквадратичное отклонение для показательного распределения имеют вид:
![]() , (1.26)
, (1.26)
 , (1.27)
, (1.27)
![]() . (1.28)
. (1.28)
Пример: время безотказной работы системы при постоянной интенсивности отказов.
1.5.2.Равномерное распределение
Плотность вероятности для равномерного закона распределения имеет вид:
![]() . (1.29)
. (1.29)
Функция распределения:
 (1.30)
(1.30)
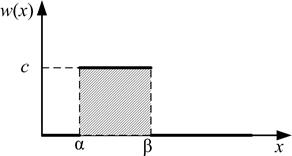

Рис. 1.7. Плотность вероятности и функция распределения
равномерного закона распределения
Математическое ожидание, дисперсия и среднеквадратичное отклонение для равномерного распределения имеют вид:
![]() ; (1.31)
; (1.31)
 ; (1.32)
; (1.32)
![]() . (1.33)
. (1.33)
Например: ошибка измерения линейкой длины бруска или игральная рулетка.
1.5.3.Нормальное распределение (Гаусса)
Плотность вероятности для нормального закона распределения имеет вид:
 , (1.34)
, (1.34)
где f – функциональная зависимость.
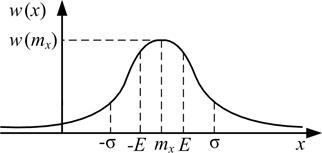
Рис. 1.8. График плотности вероятности нормального распределения
Правило 3σ:
![]() . (1.35)
. (1.35)
Если рассматривается Е – вероятное отклонение, то
![]() . (1.36)
. (1.36)
1.6. Характеристические функции
Рассмотрим характеристические функции одномерных случайных величин. Характеристической функцией g (t ) или g (j λ) действительной случайной величины X с плотностью распределения вероятностей w (x ) называется математическое ожидание функции, e j λ x , где λ – параметр (аргумент), а j – мнимая единица (j 2 =–1). Если аргумент λ имеет размерность времени, то аргумент x имеет размерность частоты.
 . (1.37)
. (1.37)
Аналог – амплитудно-фазовая характеристика для W (j ω) – преобразование Фурье от весовой функции g (t ). Комплексная форма интеграла Фурье имеет следующий вид:
 . (1.38)
. (1.38)
Сравнивая (1.37) с преобразованием Фурье видим, что характеристическая функция есть преобразование по Фурье функции распределения вероятностей. Следовательно, функция w(x ) – есть обратное преобразование по Фурье характеристической функции g (j λ):
 . (1.39)
. (1.39)
Характеристическая функция используется для решения ряда теоретических и практических задач теории вероятностей и статистической динамики.
Свойства характеристической функции:
1. При λ=0 по определению следует, что g (0)=1, то есть
 ; (1.40)
; (1.40)
2. Модуль характеристической функции не превышает единицы:
![]() ; (1.41)
; (1.41)
3. Характеристическая функция gy (j λ) суммы двух независимых случайных величин x 1 и x 2 равна произведению характеристических функций g 1 (j λ) и g 2 (j λ) этих случайных величин:
![]() ; (1.42)
; (1.42)
4. Для случайной величины y =ax +b , где a и b – неслучайные числа, характеристическая функция имеет вид:
![]() , (1.43)
, (1.43)
где g (j λ) – характеристическая функция случайной величины x .
Доказательство данного выражения можно привести, исходя из определения характеристической функции:
![]()
![]() ; (1.44)
; (1.44)
5. Если существует начальный момент m -го порядка M [xm ] случайной g (j λ) величины x , то при всех m £n значение производной порядка m от характеристической функции этой случайной величины при λ=0 равно начальному моменту m -го порядка случайной величины х , умноженному на jk , т.е.
![]() . (1.45)
. (1.45)
Формулу (1.45) используют для вычисления моментов случайных величин:
![]() , (1.46)
, (1.46)
![]() , (1.47)
, (1.47)
![]() . (1.48)
. (1.48)
Подставив в формулу (1.37) выражение для w (x ), можно определить g (j λ) для разных законов распределения.
Например, для нормального закона распределения:


 , (1.49)
, (1.49)
где  – интеграл Эйлера-Пуассона.
– интеграл Эйлера-Пуассона.
Таким образом, для нормального распределения:
 . (1.50)
. (1.50)
1.7. Векторные случайные величины
Примеры векторных (многомерных) величин:
1. Отклонение точки падения снаряда от цели:
![]() .
.
2. Случайное положение центра тяжести самолёта в пространстве:
![]() .
.
3. Случайные сигналы X и Y (векторные величины) на входе и выходе САУ (системы автоматического управления) показаны на рис. 1.9.

Рис. 1.9. Случайные сигналы на входе и выходе САУ
![]() ,
,
![]() .
.
Рассмотрим закон распределения на примере двумерного случайного вектора:
Таблица 1.4
Матрица вероятностей для дискретных случайных величин
|
y 1 | y 1 | … | ym | ||
| x 1 | P 11 | P 12 | … | P 1m | ||
| x 2 | P 21 | P 22 | … | P 2m | ||
| … | … | … | … | … | ||
| xn | Pn 1 | Pn 2 | … | Pnm |
![]() . (1.51)
. (1.51)
Функция распределения имеет вид:
![]() . (1.52)
. (1.52)
Графически – это вероятность попадания вектора [X Y ] в бесконечный квадрант, т.е. часть плоскости, ограниченную осями (рис. 1.10).
Плотность вероятности вычисляется по формуле:
 . (1.53)
. (1.53)
Вероятность попадания в область Ω рассчитывается по формуле:
![]() . (1.54)
. (1.54)

Рис. 1.10. Графическое изображение функции распределения
векторных случайных величин
Функция распределения имеет следующий вид:
 . (1.55)
. (1.55)
Плотность вероятности рассчитывается по формуле:
 . (1.56)
. (1.56)
Для n -мерного вектора расчеты производятся аналогично.
Для векторных случайных величин вводят следующие понятия:
1. Смешанный начальный момент m -го порядка (m =q +s ). Для двумерного вектора он имеет вид:
 . (1.57)
. (1.57)
2. Смешанный центральный момент :
 . (1.58)
. (1.58)
3. Если q =s =1, то получим корреляционный момент :
 (1.59)
(1.59)
для независимых x 1 и x 2 r 12 =0.
4. Иногда применяют коэффициент корреляции – относительное значение корреляционного момента:
 . (1.60)
. (1.60)
Для случайного вектора ![]() обычно задают вектор математических ожиданий
обычно задают вектор математических ожиданий ![]() и матрицу корреляционных моментов:
и матрицу корреляционных моментов:
 .
.
Составляющие корреляционной матрицы показывают степень связи между отдельными случайными величинами. По диагонали корреляционной матрицы находятся дисперсии.
Внимание! Независимые величины всегда некоррелированы, а зависимые могут быть как коррелированными, так и не коррелированными.
2.1. Понятие случайного процесса
В математике существует понятие случайной функции.
Случайная функция – такая функция, которая в результате опыта принимает тот или иной конкретный вид, причем заранее не известный какой именно. Аргумент такой функции – неслучайный. Если аргумент – время, то такая функция называется случайным процессом . Примеры случайных процессов:
· координаты цели, измеряет РЛС;
· угол атаки самолета;
· нагрузка в электрической цепи.
Особенность случайной функции (процесса) в том, что при фиксированном значении аргумента (t ) случайная функция является случайной величиной, т.е. при t =ti Х (t )=X (ti ) – случайная величина.

Рис. 2.1. Графическое представление случайной функции
Значения случайной функции при фиксированном аргументе называются его сечением . Т.к. случайная функция может иметь бесконечное множество сечений, а в каждом сечении она представляет собой случайную величину, то случайную функцию можно рассматривать как бесконечномерный случайный вектор .
Теория случайных функций часто называется теорией случайных (стохастических) процессов .
Для каждого сечения случайного процесса можно указать mx (ti ), Dx (ti ), sx (ti ) и в общем случае – wх (ti ).
Кроме случайных функций времени иногда используются случайные функции координат точки пространства. Эти функции приводят в соответствие каждой точке пространства некоторую случайную величину.
Теория случайных функций координат точки пространства называют теорией случайных полей . Пример: вектор скорости ветра в турбулентной атмосфере.
В зависимости от вида функции и вида аргумента различают 4 типа случайных процессов.
Таблица 2.1
Типы случайных процессов
| Значение аргумента t | Значение функции Х | Примеры случайных процессов |
| дискретное | дискретное | Случайный процесс в ЦВМ |
| дискретное | непрерывное | Падение капель дождя - ti
, Х – размер лужи |
| непрерывное | дискретное | Количество звонков через АТС |
| непрерывное | непрерывное | Высота полёта самолёта |
Кроме того различают:
1. Стационарный случайный процесс – вероятностные характеристики которого не зависит от времени, т.е. wх (х 1 ,t 1 )=wх (х 2 ,t 2 )=…wх (х n ,t n ).
2. Нормальный случайный процесс – совместная плотность вероятности сечений t 1 … tn – нормальная.
3. Марковский случайный процесс (процесс без последствия) состояние в каждый момент времени которого зависит только от состояния в предшествующий момент и не зависит от прежних состояний. Марковская цель – последовательность сечений марковского случайного процесса.
4. Случайный процесс типа белого шума – в каждый момент состояния не зависит от предшествующего.
Существуют и другие случайные процессы.
2.2. Вероятностные характеристики случайных процессов
В общем случае, в каждом сечении случайного процесса имеется свой закон распределения wх (х 1 ,t 1 ), wх (х 2 ,t 2 ), … wх (х n ,t n ), со своими характеристиками.
Вероятностные характеристики сечения случайного процесса определяются также как и для случайных величин:
· математическое ожидание (среднее по множеству):
 ; (2.1)
; (2.1)
· дисперсия:
 , (2.2)
, (2.2)
где ![]() .
.
Графически:

Рис. 2.2. Графическое представление множества реализаций
случайного процесса
В некоторых случаях необходимо найти среднее значение случайной величины по отдельной реализации (осреднение по времени ):
 . (2.3)
. (2.3)

Рис. 2.3. Графическое представление средней величины
Для решения задач, в которых приходится рассматривать совместно два и более сечений случайной функции, необходимо ввести совместные законы распределения для нескольких её сечений. Двухмерная плотность вероятности случайного процесса X (t ) – совместная плотность вероятности двух её сечений X (t 1 ) и X (t 2 ). Обозначается w2 (х 1 , х 2 , t 1 , t 2 ) или w2 (х 1 , t 1 , x 2 , t 2 ). Соответственно, n -мерная плотность вероятности – wn (х 1 , t 1 , … xn , tn ). Зная n -мерную плотность вероятности, можно определить все её плотности вероятности меньше, чем n размерности. Например, для получения плотности вероятности wm (х 1 , t 1 , … xm , tm ) (m <n ) достаточно проинтегрировать n -мерную плотность по переменным xm +1 … хn .
 . (2.4)
. (2.4)
Для решения инженерных задач использовать многомерные законы распределения неудобно. Для этого используют аппарат простейших характеристик , к которым относятся:
· математические ожидания;
· дисперсии;
· корреляционные функции;
· взаимные корреляционные функции.
Реже применяют другие моментные характеристики (кумулянты, семиинварианты и т.д.)
Математическим ожиданием случайной функции X (t ) называется такая неслучайная функция mx (t ), которая при каждом значении аргумента t равна математическому ожиданию соответствующего сечения случайной функции X (t ).
При известной одномерной плотности вероятности w1 (х , t )
 . (2.5)
. (2.5)
Дисперсия случайной функции X (t ) – такая неслучайная функция Dx (t ), которая при каждом значении аргумента t равна дисперсии соответствующего сечения случайной функции X (t ).
 (2.6)
(2.6)
или

Для случайного процесса применимо «правило 3-х сигм», т.е.
[mx
–3s; mx
+3s] образуют «коридор» внутри которого заключены почти все реализации случайного процесса X
(t
).
2.3. Стационарные случайные процессы
В стационарном случайном процессе закон распределения один и тот же для каждого момента времени , т.е. wx (x , t ) – не зависит от времени т.е.
w(x , t ) = w(t ). (2.7)
Следовательно mx (t ) = mx = const , sx (t ) = sx = const вдоль всего процесса. Пример: колебание напряжения и тока в установившемся режиме электрической цепи. Следует заметить, что если mx (t ) ¹ const , а sx (t ) = sx = const для ряда задач такая нестационарность несущественна, т.к. можно перейти к центрированному случайному процессу:
![]() ,
,
который будет стационарным, т.к. ![]() . Отсюда следуют важные практические свойства:
. Отсюда следуют важные практические свойства:
1) ограничиваясь только стационарными процессами, можно определить только установившиеся (стационарные) динамические ошибки автоматических систем при случайных воздействиях. (По аналогии с исследованием динамических свойств систем в установившемся режиме);
2) эргодическое свойство стационарных случайных процессов (эргодическая гипотеза): стационарный процесс обладает эргодическим свойством, если для него среднее значение по множеству наблюдений (множеству реализаций) равно среднему значению по времени наблюдения (по длине реализации) т.е. среднее по множеству равно среднему по времени.

а
Рис. 2.4. Случайный процесс обладает (а), и не обладает (б)
эргодическим свойством

б
Рис. 2.4. Окончание (начало см. на с. 24)
Следовательно, математическое ожидание для любого ti
 .
.
Аналогичным образом могут быть определены и моменты более высоких порядков: D , τ и т.д.
Эргодическая гипотеза значительно упрощает многие расчёты и эксперименты. Так вместо одновременного испытания многих систем в один момент времени можно испытывать систему в течение длительного времени. Таким образом, одна реализация стационарного случайного процесса на бесконечном (большом) промежутке времени полностью определяет весь процесс со всеми бесконечными его реализациями. Заметим, что этим свойством не обладают другие случайные процессы.
2.4. Выбросы стационарных случайных процессов
Выбросом случайного процесса называют превышение реализацией этого процесса некоторого определённого предела.
Рассмотрим процесс X (t ). На рисунке 2.5 приведена реализация x (t ) случайного процесса X (t ), пересекающая фиксированный уровень C .
Если рассматриваются только положительные выбросы, то величину Θ называют длительностью интервалов между выбросами.
Знание статистических характеристик выбросов случайных процессов необходимо при решении многих практических задач. Например, под действием выбросов может произойти срыв слежения за целью пеленгатора. Выбросы токов и напряжений за допустимые пределы могут вызвать отказы элементов автоматики и радиотехнических систем.

Рис. 2.5. Выбросы случайного процесса
На рисунке 2.5 обозначено:
Н – локальный максимум процесса X (t );
Н m – абсолютный максимум функции X (t );
τ0 – момент первого выброса;
τ – длительность положительного выброса – пересечения реализацией X
(t
) уровня C снизу вверх ![]() ;
;
![]() – длительность отрицательного выброса пересечения реализаций x
(t
) уровня с верху вниз
– длительность отрицательного выброса пересечения реализаций x
(t
) уровня с верху вниз ![]()
Т – длительность реализации x (t );
N – число выбросов.
Определим среднее число положительных выбросов нормального стационарного случайного процесса X (t ) за уровень C на интервале (0, T ).
Очевидно, что число выбросов N (T ) случайного процесса за уровень C на интервале (0, T ) случайно зависит от длительности этого интервала и определяется следующим выражением:
 . (2.8)
. (2.8)
Действительно, подинтегральная функция вследствие свойств дельта-функции и единичной ступенчатой функции равна нулю всюду, кроме тех точек, где случайный процесс X (t ) пересекает уровень C (условие x (t )–C =0).

Рис. 2.6. Пересечение процессом ![]() уровня С
уровня С
В точках tk
(k
=1,2,…) подынтегральная функция бесконечна (так как ![]() ) и в каждой из этих точек интеграл скачком возрастает на единицу.
) и в каждой из этих точек интеграл скачком возрастает на единицу.
Для объяснения этого рассмотрим N (t ) на интервале (tk –e, tk +e), в котором случайный процесс пересекает уровень снизу. Сделаем замену переменных
 (так как
(так как ![]() ). (2.9)
). (2.9)
Следовательно, интеграл (2.8) равен числу положительных пересечений случайного процесса ![]() с уровнем C
на интервале [0,T
].
с уровнем C
на интервале [0,T
].
Среднее число положительны выбросов случайного процесса X (t ) за уровень C равно математическому ожиданию случайной величины N (t ) – числа выбросов на [0,T ].
 , (2.10)
, (2.10)
где ![]() – двумерная плотность вероятности случайного процесса
– двумерная плотность вероятности случайного процесса ![]() и его производной
и его производной ![]() , которая для стационарного нормального случайного процесса со средним нулевым значением равна
, которая для стационарного нормального случайного процесса со средним нулевым значением равна
 . (2.11)
. (2.11)
Подставляя формулу (2.8) для Nc (T ) в (2.10), получим
 . (2.12)
. (2.12)
Используем известное правило интегрирования произвольной функции ![]() на дельта-функцию
на дельта-функцию ![]()
 . (2.13)
. (2.13)
Проинтегрируем подинтегральное выражение по переменной x
 . (2.14)
. (2.14)
Для стационарного случайного процесса внутренний интеграл не зависит от времени. Поэтому выражение (2.14) можно записать в следующем виде:
 . (2.15)
. (2.15)
Выражение (2.15) позволяет определить среднее число положительных выбросов стационарного нормального предела X (t ) за уровень c .
Среднее число отрицательных выбросов случайного процесса за произвольный уровень h определяется аналогично:
 . (2.16)
. (2.16)
Среднее число положительных и отрицательных выбросов случайного процесса определяется как сумма (за уровень c и уровень h )
![]() . (2.17)
. (2.17)
Зная среднее число выбросов случайного процесса за заданный уровень, можно определить интенсивность λ числа выбросов на интервале [0, T ], разделив среднее число выбросов на длину интервала
 . (2.18)
. (2.18)
Подставляя формулу (2.11) для плотности вероятности ![]() ,в которой заменён параметр x
на c
, в (2.18) и вычисляя полученный интеграл, окончательно получим
,в которой заменён параметр x
на c
, в (2.18) и вычисляя полученный интеграл, окончательно получим
 . (2.19)
. (2.19)
Число выбросов Nc (T ) случайного процесса X (T ) за уровень c на интервале [0,T ] представляет собой дискретную случайную величину, возможными значениями которой являются неотрицательные целые числа.
При достаточно большом уровне ![]() выбросы нормально стационарного процесса X
(T
) становятся редкими явлениями, а интервалы Θ между выбросами будут настолько велики по сравнению с длительностью выбросов τ, что сечения случайного процесса, разделённые такими интервалами, будут практически независимыми. Следовательно, моменты t
1
, t
2
, … выбросов также будут независимыми.
выбросы нормально стационарного процесса X
(T
) становятся редкими явлениями, а интервалы Θ между выбросами будут настолько велики по сравнению с длительностью выбросов τ, что сечения случайного процесса, разделённые такими интервалами, будут практически независимыми. Следовательно, моменты t
1
, t
2
, … выбросов также будут независимыми.
При таких предположениях закон распределения числа выбросов будет близок к пуассоновскому закону, для которого
 , (2.20)
, (2.20)
где Pm – вероятность того, что число положительных выбросов за уровень c случайного процесса X (t ) на интервале [0, T ] равна числу m .
![]() . (2.21)
. (2.21)
Известно, что для пуассоновского распределения дисперсия и математическое ожидание совпадают
![]() , (2.22)
, (2.22)
поэтому при несовпадении этих параметров пользуются законами, выраженными линейными комбинациями пуассоновских распределений с разными параметрами.
Для вычисления интенсивности λc
(T
) числа выбросов (2.19) необходимо знать величины ![]() и
и ![]() , которые определяются по известной корреляционной функции
, которые определяются по известной корреляционной функции ![]() стационарного случайного процесса
стационарного случайного процесса
![]() , (2.23)
, (2.23)
 . (2.24)
. (2.24)
Важными для практики исследования систем управления являются вероятность отсутствия выбросов P 0 и вероятность хотя бы одного выброса на интервале (0, T ), определяемые на основе (2.20) выражениями:
![]()
![]() (2.25)
(2.25)
![]()
![]() . (2.26)
. (2.26)
В заключение отметим, что систематическое и полное изложение теории и практических вопросов, связанных с выбросами случайных процессов даётся в книгах В.И. Тихонова (Стат. радиотехника, Тихонов, Миронов и т.д.).
3. Корреляционные функции случайных процессов
3.1. Понятие корреляционной функции
Ранее были рассмотрены вероятностные характеристики случайных процессов:
· математическое ожидание случайной x (t ) функции – такая неслучайная функция mx (t ) аргумента t , которая в каждом сечении случайной функции равна математическому ожиданию соответствующей (этому сечению) случайной величины:
 ; (3.1)
; (3.1)
· дисперсия случайной функции x (t ) – такая неслучайная функция Dx (t ) аргумента t , которая в каждом сечении случайной функции равна дисперсии соответствующей (этому сечению) случайной величины:
 ;(3.2)
;(3.2)
· среднее квадратическое отклонение:
![]() .(3.3)
.(3.3)
Достаточно ли всех этих характеристик, чтобы полностью описать случайный процесс, например: процессы с одинаковыми mx и Dx ? Оказывается, что нет (рис. 3.1.). Для полного описания случайных процессов вводится понятие корреляционной функции .

а
Рис. 3.1. Различие двух процессов ![]() и Y
(t
) при
и Y
(t
) при
равных математическом ожидании, дисперсии, СКО

б
Рис. 3.1. Окончание (начало см. на с. 30)
Предполагаем, что закон распределения нормальный. На графиках видно резкое отличие процессов, несмотря на их равные вероятностные характеристики.
Чтобы охарактеризовать структуру случайного процесса (изменчивость реализации во времени) необходимо ввести характеристику зависимости (корреляции ) двух сечений случайного процесса.
Что же такое корреляция? Приведем пример для наглядного пояснения.
Так, например, если речь идет о слежении за самолетом, то он не может как угодно быстро менять свое положение и скорость. Поэтому если он в момент времени t занял положение х 1 то этим самым его возможное положение х 2 в следующий момент t 2 ограничено, т. е. события (x 1 , t 1 ) и (x 2 , t 2 ) не будут независимыми. Чем более инерционен изучаемый объект, тем больше эта взаимозависимость, или корреляция . Корреляционная функция математически выражает корреляцию двух функций или корреляцию функции с самой собой (автокорреляционная функция ).
Корреляционная функция описывается в следующем виде:
 , (3.4)
, (3.4)
где t 1 и t 2 – любые моменты времени, то есть t 1 и t 2 ÎТ
Корреляционная функция – такая неслучайная функция Rx (t 1 , t 2 ) двух аргументов, которая для любой пары фиксированных значений аргументов t 1 и t 2 равна корреляционному моменту, соответствующих этим сечениям случайных величин x (t 1 ) и x (t 2 ).

Рис. 3.2. Корреляционные функции двух различных процессов x (t ) и y (t )
При совпадении моментов t 1 и t 2 корреляционная функция равна дисперсии. Нормированная корреляционная функция вычисляется по формуле:
 , (3.5)
, (3.5)
![]() ,
,
где sx
(t
1
) и sx
(t
2
) с.к.о. случайной функции x
(t
) при t
=t
1
и t
=t
2
соответственно. Для вычисления корреляционной функции требуется знать вторую плотность (двумерную) вероятности ![]()
 (3.6)
(3.6)
Замечания.
1) Знание первой плотности вероятности w1 (x , t ) позволяет вычислять математическое ожидание случайного процесса M [x , t ], дисперсию случайного процесса и с.к.о.
![]() .
.
Для определения корреляционной функции нужно знать вторую плотность вероятности.
![]() .
.
Знание о случайном процессе будет тем полнее, чем больше сечений мы будем рассматривать совместно и, следовательно, чем больше размерность плотности вероятности. Следовательно рассматривая n сечений нужно знать n -мерную плотность.
![]() .
.
Для полного описания случайного процесса необходимо знать бесконечномерную плотность вероятности. На практике обычно ограничиваются знанием первой и второй плотности вероятности.
2) Иногда для решения практических задач используют второй начальный момент (начальный момент второго порядка).
 (3.7)
(3.7)
Если t 1 =t 2 =t , то
![]() .
.
Чтобы установить связь, между X (t ) и Y (t ) вводится понятие взаимной корреляционной функции (корреляционная функция связи ), показывающая связь двух и более сечений процессов x (t ) и y (t ).
 Рис. 3.3. Сечения процессов X
(t
) и Y
(t
)
Рис. 3.3. Сечения процессов X
(t
) и Y
(t
)
При этом

Нельзя произвольно менять местами или индексы или аргументы.
Для вычисления корреляционной функции нужно знать ![]() . Тогда
. Тогда
 . (3.8)
. (3.8)
Введём нормированную корреляционную функцию связи.
 , (3.9)
, (3.9)
где ![]() .
.
3.2. Операции над случайными функциями (процессами)
3.2.1.Сложение
Пусть Z (t )=Х (t )+Y (t ).

Рис. 3.4. Сумматор случайных функций
Т.е. имеем сумматор.
Известны: характеристики входных сигналов:
Требуется найти:
1) ![]() Rz
(t
1
, t
2
); Dz
(t
)=Rz
(t
, t
);
Rz
(t
1
, t
2
); Dz
(t
)=Rz
(t
, t
);
![]() =mx
(t
)+my
(t
).
=mx
(t
)+my
(t
).
2) ![]()

![]() . (3.10)
. (3.10)
Если случайные функции не коррелированны, то получим:
![]() . (3.11)
. (3.11)
При t 1 =t 2 =t из (3.7) получим
3) ![]() . (3.12)
. (3.12)
Для некоррелированных случайных функций дисперсия суммы равна сумме дисперсий.
![]() .
.
Если  , то получим
, то получим
 . (3.13)
. (3.13)
Для некоррелированных функций
 . (3.14)
. (3.14)
Для некоррелированных случайных функций
![]() , (3.15)
, (3.15)
где ![]() .
.
3.2.2.Сложение случайной функции и неслучайной

Рис. 3.5. Сумматор случайной и неслучайной функции
W (t )=X (t )+j(t ), где φ(t ) – неслучайная функция, например:
![]() и т.д.
и т.д.
Известно также: mx (t ), Kx (t 1 , t 2 ).
Нужно определить: mw (t ), Rw (t 1 , t 2 ), Dw (t ).
1) mw (t )=mx (t )+j(t ).
2) ![]() (3.16)
(3.16)
где ![]() .
.
Вывод: если к случайной функции прибавить неслучайную, то корреляционная функция не изменится.
3.2.3.Умножение случайной функции на неслучайную функцию
Обозначим: U (t )=ψ(t )X (t ), ψ(t ) – неслучайная функция.
Известно также: mx (t ), Rx (t 1 , t 2 ).
Требуется определить: mu (t ), Ru (t 1 , t 2 ).
Рис. 3.6. Мультиплексор случайной и неслучайной функций
1) mu (t )=mu (t )ψ(t ).
2) ![]()
где ![]() .
.
Вывод . Если случайная функция умножается на неслучайную, то её корреляционная функция умножается на неслучайную дважды: один раз при аргументе t 1 , другой раз при t 2 .
Приложение . Комплексная случайная функция
![]() , (3.17)
, (3.17)
для которой известны характеристики X 1 (t ) и X 2 (t ):
1) ![]() . (3.18)
. (3.18)
 (3.19)
(3.19)
где ![]() – (3.20)
– (3.20)
центрированная комплексно-сопряжённая функция в сечении t 2 .
Примечание: если X 1 (t ) и X 2 (t ) не коррелированны, то:
![]() . (3.21)
. (3.21)
3) 
![]() . (3.22)
. (3.22)
3.2.4.Дифференцирование случайных функций (процессов).
Обозначим произведение случайного процесса:

Дано:  ,
, ![]() (можно менять местами операции дифференцирования и математического ожидания).
(можно менять местами операции дифференцирования и математического ожидания).
![]() .
.
Об X (t ) известно: mx (t ) и Dx (t ).
Требуется найти ![]() ;
;
![]() ;
;
![]() .
.
Т.о. получили ![]() .
.
Математическое ожидание производной равно производной от математического ожидания:

где  ,
,
 .
.
Таким образом  .
.
Для производных более высокого порядка, если ![]() , то
, то
Пусть имеем: Yq (t )=X ( q ) (t ), тогда:
 . (3.23)
. (3.23)
Замечание. В общем случае, определение производной не применимо к случайным функциям т.к. определение предела не применимо к случайным величинам в строгом его понимании. Действительно,
 . (3.24)
. (3.24)
Величина Y D (t ) равна отношению приращения случайной величины при фиксированном t к Dt .
Если последовательность Dt стремится к нулю Dt ®0, то последовательность {Y D (t )} стремится к какому-то пределу в вероятностном смысле, а не в обычном.
Будем рассматривать предел в среднем квадратическом. Случайная функция X (t ) со скалярным аргументом t дифференцируема, если существует случайная функция Y 1 (t ), называемая производной X (t ), такая что
 . (3.25)
. (3.25)
Из определения следует, что производная случайной функции X (t ) – предел в среднем квадратическом отношения приращения функции к приращению аргумента Dt . Это записывается как
![]() . (3.26)
. (3.26)
Обоснуем замену ![]() .
.
Для этого найдём ![]() .
.

3.2.5.Интегрирование случайной функции
Рассмотрим интеграл Дюамеля:
 , (3.27)
, (3.27)
где g (t , τ) – некоторая функция двух переменных (весовая функция), X (τ) – случайная функция, t –t 0 =T – область интегрирования. Известно также: mx (τ); Rx (τ1 , τ2 ).
Требуется определить: ![]() .
.

Рис. 3.7. Интегратор случайных функций
Пример : система счисления пути (рис. 3.8).

Рис. 3.8. Система счисления пути по карте
1) Определение математического ожидания.
 (3.28)
(3.28)
2) Определение корреляционной функции:
![]() . (3.29)
. (3.29)
Вычитаем из выражения для Y
(t
) выражение для ![]()
 .
.

![]() .
.
3) Определение дисперсии.
Берём одно сечение t 1 =t 2 =t
![]() . (3.30)
. (3.30)
Отсюда следует, что корреляционная функция – положительно определённая функция.
Замечание. Данное выше решение задачи: определение математического ожидания и корреляционной функции интеграла от случайной функции является пока не строгим по двум причинам:
1) не строгим было изменение порядка операций интеграла и М[…];
2) обычное определение интеграла не применимо к случайным функциям по тем же причинам, что и при дифференцировании.
Случайную функцию X (t) будем называть интегрируемой по области Т с весом g (t , t), если существует случайная функция Y (t ), называемая интегралом такая, что
 . (3.31)
. (3.31)
Для любых tk , разбивающих область интегрирования на произвольные участки Dtk .

Рис. 3.9. Разбиение области интегрирования
Из определения интегрируемости случайной функции следует, что интеграл Y (t ) – предел в среднем квадратическом от интегральной суммы:
![]() . (3.32)
. (3.32)
3.3. Свойства корреляционных и взаимно корреляционных функций
1. Корреляционная функция Rx (t 1 , t 2 ) симметрична относительно своих аргументов:
Rx (t 1 , t 2 ) = Rx (t 2 , t 1 ) (3.33)
в соответствии с определением корреляционной функции X (t ).
Корреляционная функция комплексной случайной функции при перестановке аргументов заменяется комплексной сопряжённой функцией:
![]() . (3.34)
. (3.34)
так же 
2. При добавлении к случайной функции X (t ) произвольного неслучайного слагаемого j(t ), корреляционная функция случайной величины не изменяется, т.е. если
![]() (3.35)
(3.35)
то Rz (t 1 , t 2 ) = Rx (t 1 , t 2 ).
3. При умножении случайной функции X (t ) на произвольный неслучайный множитель ψ(t ) корреляционная функция Rx (t 1 , t 2 ) умножается на ψ(t 1 )ψ(t 2 ):
4. ![]() .
.
5. Корреляционная функция является положительно определённой функцией, т.е.
![]() , (3.36)
, (3.36)
где j(τ1 ), j(τ2 ) – произвольные функции при t =τ1 и t =τ2. Так как
![]() , (3.37)
, (3.37)
т.е. дисперсия случайной функции всегда неотрицательна. Аналогичными свойствами обладает и взаимная корреляционная функция двух случайных функций.
![]() . (3.38)
. (3.38)
Для комплексных случайных функций ![]() .
.
6. Взаимная корреляционная функция двух случайных функций X (t ) и Y (t ) не изменяется при добавлении к этим случайным функциям произвольных неслучайных функций.
7. Если U (t )=ψ1 (t )X (t ); V (t )=ψ2 (t )Y (t ), то RUV (t 1 , t 2 )=ψ1 (t 1 )ψ2 (t 2 )Rxy (t 1 , t 2 ).
8. ![]() .
.
Кроме указанных выше свойств корреляционной функции и взаимно корреляционной функции следует, что
 (3.39)
(3.39)
где ρx (t 1 , t 2 ), ρxy (t 1 , t 2 ) – нормированные корреляционные функции.
3.4. Экспериментальное определение корреляционных функций
Корреляционную функцию процесса можно определить экспериментально на основании снятой кривой (реализации) данного процесса при достаточно длительной записи.
Обработка имеющейся записи процесса (осциллограммы) производится следующим образом.

Рис. 3.10. Определение корреляционной функции
по снятой экспериментально кривой
Весь интервал записи осциллограммы Т
делится на N
равных частей, длительность которых составляет ![]() ; T
>>Dt
.
; T
>>Dt
.
Для различных значений t=m Dt находят средние значения произведений ординат (формула математической статики):
 . (3.40)
. (3.40)
При этом необходимо выделить постоянную составляющую
 . (3.41)
. (3.41)
По этим значениям строится график корреляционной функции в зависимости от интервала m или времени t=m Dt .
Корреляционную функцию можно найти по результатам эксперимента при помощи специальных приборов-корреляторов, которые автоматически вычисляют среднее произведение двух ординат осциллограммы (реализации процесса), отстоящих друг от друга на время t.
4. Спектральная плотность стационарных случайных процессов
Проведем поэтапный вывод спектрального разложения:
1) Представим стационарную случайную функцию X (t ) как сумму синусоидальных функций частоты w1 , w2 , … – разложим X (t ) в ряд Фурье:
 , (4.1)
, (4.1)
или то же самое представим в комплексной форме:
 (4.2)
(4.2)
Коэффициенты разложения Zk , Uk , Ck определяются по формулам Эйлера-Фурье. В выражении (4.1) Zk , Uk – некоррелированные центрированные случайные величины (амплитуды колебаний) с дисперсиями, одинаковыми для каждой пары случайных величин Zk и Uk с одним и тем же индексом k :
![]() , (4.3)
, (4.3)
где Ck – соответственно комплексная случайная величина.
Координатными функциями разложения (4.1) являются функции sinwk t и coswk t при различных частотах wk . Такое разложение называется спектральным разложением стационарной случайной функции. Частоты wk (k =1, 2, …) являются кратными некоторой основной частоте (первой):
![]() , (4.4)
, (4.4)
соответствующей периоду 2T :
![]() . (4.5)
. (4.5)
Спектральное разложение представляет собой случайную функцию X (t ) в виде гармонических колебаний различных частот со случайными амплитудами (рис. 4.1). Спектр стационарного случайного процесса характеризует распределение дисперсий случайных амплитуд по частотам. Спектральное разложение (4.1) является разложением случайной функции X (t ) на конечном интервале наблюдения T .

Рис. 4.1. Колебания различных частот со случайными амплитудами
Такое разложение находит широкое применение при исследовании автоматических, радиотехнических и других систем. Для исследования спектрального разложения удобно представлять его в комплексной форме.
2) Рассмотрим входящую в (4.1) гармонику частоты wk :
![]() , (4.6)
, (4.6)
где Zk , Uk – случайные амплитуды с характеристиками:
![]() . (4.7)
. (4.7)
Представим Zk (t ) в комплексной форме с помощью формул Эйлера:
 ;
;
 . (4.8)
. (4.8)
Подставим выражение (4.8) в (4.6):
![]() . (4.9)
. (4.9)
Введём обозначения:
![]() (4.10)
(4.10)
Тогда выражение (4.9) примет следующий вид:
![]() . (4.11)
. (4.11)
3) Определим вероятностные (моментные) характеристики комплексных случайных величин Vk , V – k . Очевидно, что они центрированы:
![]() , (4.12)
, (4.12)
так как составляющие их случайные величины также центрированы (4.7), то можно определить корреляционный момент Vk , V – k :
![]()
 (4.13)
(4.13)
Так как по условию D [Uk ]=D [Zk ]=Dk ; Uk , Zk – некоррелированы, определим дисперсии Vk , V – k соответственно:
 ,
,
 . (4.14)
. (4.14)
Таким образом
![]() . (4.15)
. (4.15)
Следовательно, как видно из выражений (4.11) и (4.14) случайные величины Vk
, V
–
k
– амплитуды гармонического колебания Xk
(t
) с частотами wk
, (–wk
). А Vk
, V
–
k
– комплексные центрированные некоррелированные случайные величины с одинаковыми дисперсиями ![]() .
.
4) Определим корреляционную функцию случайного процесса Xk (t ):
 , (4.16)
, (4.16)
где
![]() ;
;
![]() . (4.17)
. (4.17)
Подставляя (4.17) в (4.16), получим:

где t 1 –t 2 =τ.
Учитывая выражение (4.14) и некоррелированность Vk , V – k , получим:
![]() . (4.18)
. (4.18)
Таким образом, дисперсия случайной гармоники Xk (t ) при представлении её в комплексной форме делится пополам между гармоникой положительной частоты wk и отрицательной частоты (–wk ), что представлено на рис. 4.2.
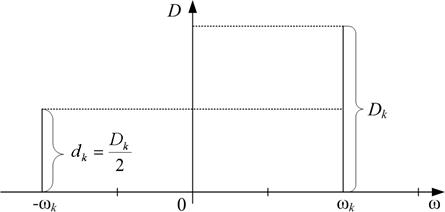
Рис. 4.2. Дисперсия случайной гармоники Xk (t )
5) Рассмотрим распределение по частотам w1 , w2 , … wk дисперсий гармоник Xk (t ), соответствующих этим частотам.
В соответствии с (4.1) и (4.11) представим случайный процесс X (t ) в комплексной форме:
 . (4.19)
. (4.19)
Обозначим отрицательные частоты:
![]() (4.20)
(4.20)
Суммируем отдельно слагаемые, соответствующие положительным и отрицательным частотам:
 (4.21)
(4.21)
Заметим, что сумму отрицательных слагаемых можно выразить таким же образом, как и сумму положительных слагаемых:
 . (4.22)
. (4.22)
С учётом (4.22) выражение (4.19) примет вид:
 . (4.23)
. (4.23)
Здесь мы объединили две суммы в одну, так как первая сумма содержит слагаемые с номерами k Î[1, ¥], а вторая – с номерами k Î[–¥, 1], поэтому можно рассматривать сумму членов с номерами k Î[–¥, ¥] за исключением номера k =0. Полученное выражение (4.23) представляет собой стационарный случайный процесс X (t ), составленный из случайных гармоник частоты wk , k Î(–¥, ¥), k ¹0 в виде линейных комбинаций показательных функций со случайными коэффициентами.
6) Определим корреляционную функцию и дисперсию случайного процесса X (t ). Корреляционная функция процесса X (t ) является чётной (Rx (τ)=Rx (–τ)), т.к. процесс стационарный. Следовательно, на графике она представлена симметричной кривой (рис. 4.3).

Рис. 4.3. Корреляционная функция процесса X (t )
Свойства X (t ), представленного в виде ряда Фурье:
а) при изменении t 1 , t 2 от 0 до T аргумент τ=t 1 –t 2 изменяется от –T доT ;
б) корреляционная функция Rxk (t 1 , t 2 ) гармоники wk определяется формулой (4.18);
в) Случайная функция (процесс) X (t ) представляется в виде суммы гармоник различных частот (4.23);
г) Так как члены суммы (4.23) некоррелированы, то корреляционная функция Rx (t 1 , t 2 ) равна сумме корреляционных функций слагаемых.
На основании данных свойств и с учётом выражений (4.18), (4.20) и (4.22), получим:
 . (4.24)
. (4.24)
д) Для определения дисперсии случайного процесса X (t ) достаточно в выражении (4.24) представить t 1 =t 2 =t .
 , (4.25)
, (4.25)
где введено обозначение ![]() , т.е. ряд Фурье можно представить в виде:
, т.е. ряд Фурье можно представить в виде:
 . (4.26)
. (4.26)
Выражение (4.24) или (4.26) показывает, что частотам ±wk соответствуют дисперсии случайных амплитуд гармоник Xk (t ), т.е. корреляционная функция разложена в ряд Фурье.
Распределение дисперсии по частотам определяет так называемый спектр дисперсий стационарной случайной функции. Спектр дисперсий можно изобразить на графике в виде линейчатого спектра (рис. 4.4).

Рис. 4.4. Спектр дисперсий
На рис. 4.4 по оси абсцисс откладываются частоты wk в соответствии с формулой (4.5), а по оси ординат – соответствующие этим частотам дисперсии.
7) Перейдём от математической абстракции к физическим процессам. Так как отрицательные частоты физически не существуют, формулы (4.24), (4.25), (4.26) можно переписать только для положительных частот w1 , w2 , … wk . При этом дисперсии, соответствующие этим частотам, необходимо удвоить.
 ; (4.27)
; (4.27)
![]()
 . (4.28)
. (4.28)
Спектр дисперсий, соответствующий только положительным частотам представлен на рис. 4.5. Формула (4.28) показывает, что дисперсия стационарного процесса X (t ) равна дисперсий всех гармоник его спектрального разложения. Формула (4.26) даёт разложение корреляционной функции Rx (τ) случайного процесса X (t ), t Î[0, T ] в ряд Фурье, коэффициентами которого являются дисперсии dk . А dk вычисляются как коэффициенты ряда Фурье:
 , k
=±1, ±2, … (4.29)
, k
=±1, ±2, … (4.29)

Рис. 4.5. Спектр дисперсий, соответствующий положительным частотам
Таким образом, X (t ) и её корреляционная функция Rx (τ) разложены в ряд Фурье. Дисперсии гармоник dk – коэффициенты ряда Фурье для корреляционной функции.
4.2. Спектральное разложение стационарных случайных функций (процессов) в непрерывный спектр дисперсии
Перейдём к рассмотрению непрерывного спектра дисперсий стационарной случайной функции X (t ).
Для этого будем рассматривать X
(t
) при T
®¥. Тогда расстояния между опорными частотами ![]() будут неограниченно уменьшаться, так как при
будут неограниченно уменьшаться, так как при ![]() .
.
При этом дискретный спектр дисперсии будет неограниченно приближаться к непрерывному, в котором бесконечно малому интервалу частот Dwk =wk –wk –1 будет соответствовать элементарная дисперсия dk (wk ).
Прежде, чем перейти к пределу, рассмотрим допредельный случай, когда интервал Dw®0, но ещё не равен нулю (рис. 4.6). Физический смысл мы рассматривали ранее.

Рис. 4.6. Дискретный спектр дисперсий
Примем следующие допущения:
1) по оси абсцисс (ось частот) отложим отрезки ![]() :
:

Рис. 4.7. Средняя плотность дисперсий
2) по оси ординат (ось дисперсий) будем откладывать среднюю плотность дисперсии – дисперсию dk , отнесённую к величине Dw
![]() , (4.30)
, (4.30)
т.е. на каждом отрезке Dw как на основании построим прямоугольник площадью dk . Это напоминает гистограмму статистического распределения случайной величины.
Таким образом, ордината ![]() имеет физический смысл средней плотности дисперсии
и называется спектральной плотностью
, т.е.
имеет физический смысл средней плотности дисперсии
и называется спектральной плотностью
, т.е.
![]() , (4.31)
, (4.31)
здесь эта величина и есть спектральная плотность процесса X (t ).
Очевидно, что сумма площадей всех прямоугольников равна дисперсии Dx случайной функции X (t ) в соответствии с приведённой ранее формулой:
 . (4.32)
. (4.32)
Ранее были получены формулы, выражающие спектральное разложение стационарной случайной функции X (t ), t Î[1, T ] в дискретный спектр дисперсий:
 (4.33)
(4.33)
 (4.34)
(4.34)
 (4.35)
(4.35)
Заменим случайные величины Vk (комплексные амплитуды гармонических колебаний) случайными величинами V (wk )×Dw, т.е.
 (4.36)
(4.36)
Соответственно в формулах (4.34) и (4.35) заменим дисперсии dk произведениями zx (wk )×Dw, т.е.
 ; (4.37)
; (4.37)
 . (4.38)
. (4.38)
Преобразуем формулу (4.36) для dk
. Для этого разделим обе части формулы на величину Dw¹0![]() и учтём, что:
и учтём, что:
![]() . (4.39)
. (4.39)
Формула (4.36) примет вид:
 . (4.40)
. (4.40)
Осуществим предельный переход:
 .
.
С учётом этого формулы (4.37) и (4.41) примут вид:
 (4.41)
(4.41)
 (4.42)
(4.42)
 (4.43)
(4.43)
 (4.44)
(4.44)
Формула (4.43), выражающая корреляционную функцию стационарного случайного процесса через её спектральную плотность, была впервые получена в начале 30-х годов для ограниченного класса случайных процессов американским математиком, «отцом» кибернетики Норбертом Винером (1894-1964). Несколько позже эту формулу для любых стационарных случайных процессов вывел советский математик Александр Яковлевич Хинчин (1894-1959). Поэтому формулы (4.43) и (4.45), связывающие Rx (τ), Sx (w) называют формулами Винера-Хинчина .
Графический смысл предельного перехода от конечного интервала [0, T ] к бесконечному при T ®¥, Dw®0 выражается в том, что ступенчатая функция sx (wk ) будет неограниченно приближаться к непрерывной функции sx (w), которая будет изображать плотность распределения дисперсии случайных амплитуд по частотам непрерывного спектра .
Непрерывная функция sx (w) называется спектральной плотностью стационарного случайного процесса . sx (w) характеризует частотный состав стационарного случайного процесса X (t ) и полностью определяется его корреляционной функцией Rx (τ) (4.45).

Рис. 4.8. Спектральная плотность стационарного случайного процесса
Формула (4.44) представляет собой разложение дисперсии Dx на сумму элементарных слагаемых sx (w)d w, каждая из которых представляет собой дисперсию, приходящуюся на элементарный бесконечно малый интервал частот d w, прилежащей к точке w при (–¥<w<¥).
Если рассматривать спектр дисперсии в физически возможном диапазоне частот wÎ[0, ¥), то спектральная плотность Sx (w) в этом диапазоне удваивается по амплитуде с тем, чтобы площадь под кривой спектральной плотности не изменилась.
В отличие от спектральной плотности zx (w), рассматриваемой на всём диапазоне частот, будем рассматривать спектральную плотность только для положительных частот и обозначим ее Sx (w).
С учётом этого дисперсия процесса X (t ) будет вычисляться по формуле:
 , (4.45)
, (4.45)
где
 , (4.46)
, (4.46)
 . (4.47)
. (4.47)
На практике иногда пользуются так называемой нормированной спектральной плотностью:
 , (4.48)
, (4.48)
 . (4.49)
. (4.49)
Так как Rx (τ) и sx (τ) представляют собой чётные вещественные функции, то иногда формулы (4.47) и (4.48) для Rx (τ) и sx (w) представляют в вещественной форме:
 , (4.50)
, (4.50)
 . (4.51)
. (4.51)
Выражения (4.51), (4.52) получены на основе равенств

после подстановки и отбрасывания мнимых частей (слагаемых). Графически связь sx (w) с R (t ) можно представить следующим образом (рис. 4.9):

Рис. 4.9. Связь процесса со спектральной плотностью и корреляционной функцией
Чем шире спектр sx (w), тем большие частоты представлены в X (t ), т.е. тоньше структура X (t ), и быстрее происходят изменения X (t ) во времени.
Свойства спектральной плотности:
a) Спектральная плотность действительного стационарного случайного процесса является чётной действительной функцией аргумента w, т.е.
sx (w)=–sx (–w), Imsx (w)=0 – мнимая часть.
б) Дисперсия действительного стационарного случайного процесса равна интегралу от спектральной плотности этого процесса в бесконечных пределах:
 .
.
в) Спектральная плотность стационарного случайного процесса – функция неотрицательная, т.е.
![]() .
.
Зная спектральный состав случайного процесса, можно рационально конструировать системы различного назначения. Например, сенсорное устройство.
Рис. 4.10. Спектральная плотность сенсорного устройства
[w1 , w2 ] – чувствительность сенсорного устройства.
4.3. Корреляционные функции и спектральные плотности типовых стационарных процессов
1. Белый шум .
Как отмечено ранее, белый шум – это центрированный случайный процесс X (t ) с некоррелированными сечениями. Следовательно, по определению, корреляционная функция белого шума:
![]() . (4.52)
. (4.52)
Множитель G (t )=G (t 1 )=G (t 2 ) называется интенсивностью белого шума, d – дельта функция. Если G (t )=G – белый шум стационарный.
Дисперсия белого шума:
![]() . (4.53)
. (4.53)
Используя формулу Винера-Ханчина, вычислим спектральную плотность:
 (4.54)
(4.54)
Графически это показано на рис. 4.11.
Белый шум – идеализированная случайная функция, реализовать которую на практике невозможно. Некоторые процессы в пределах заданных (достаточно широких) диапазонов можно приближённо считать белым шумом. Например, тепловые шумы сопротивления:
![]() , (4.55)
, (4.55)
где R – сопротивление, к = 1,37*10-23 – постоянная Больцмана, Т 0 – абсолютная температура.

Рис. 4.11. Корреляционная функция и спектральная плотность белого шума
2. Формирующий фильтр .
Из белого шума ![]() можно получить случайный процесс с заданными характеристиками, пропуская
можно получить случайный процесс с заданными характеристиками, пропуская ![]() через апериодическое звено (рис. 4.12).
через апериодическое звено (рис. 4.12).

Рис. 4.12. Формирующий фильтр
Уравнение формирующего фильтра имеет вид:
![]() .
.
Если интенсивность белого шума задать G =1, а параметры апериодического звена:
 , (4.56)
, (4.56)
то X (t ) имеет следующие характеристики (рис. 4.13).
Экспоненциальная корреляционная функция будет иметь вид:
![]() . (4.57)
. (4.57)
Воспользуемся преобразованием Винера-Ханчина:
 , (4.58)
, (4.58)
где учтено, что 
 (4.59)
(4.59)

Рис. 4.13. Корреляционная функция и спектральная плотность
формирующего фильтра
При уменьшении параметра a (при возрастании постоянной времени Т ) корреляционная функция будет убывать медленнее, что соответствует более плавным реализациям случайного процесса X (t ). Кривая sx (w) при этом вытягивается вверх, сжимаясь с боков, т.е. повышается удельный вес низких частот.
При a®¥ (T ®0) X (t ) вырождается в белый шум.
3. Нерегулярная качка .
Некоторые объекты, например корабли, самолёты, находясь под действием нерегулярных возмущений (волнение моря, турбулентность атмосферы), движутся по случайному закону. Получающееся при этом случайное движение объекта называют нерегулярной качкой, в отличие от регулярной качки, представляющей собой периодическое движение. График такого процесса имеет вид, представленный на рис. 4.14. Несмотря на случайный характер, это движение близко к периодическому. Корреляционная функция нерегулярной качки имеет вид:
![]() . (4.60)
. (4.60)
Выражение (4.60) является экспоненциально-косинусной корреляционной функцией, где w0
– резонансная частота, a – параметр затухания (![]() T
– постоянная времени), Dx
– дисперсия.
T
– постоянная времени), Dx
– дисперсия.

Рис. 4.14. Нерегулярная качка
Значения Dx , a, w0 обычно находят экспериментально.
По формуле Винера-Ханчина определим спектральную плотность:
 (4.61)
(4.61)
Таким образом, описывается изменение одного из параметров нерегулярной качки, например, угла крена (или угловой скорости).
Графики корреляционной функции и спектральной плотности нерегулярной качки имеют вид:

Рис. 4.15. Корреляционная функция и спектральная плотность
нерегулярной качки
Для корреляционных функций типовых случайных процессов определены их изображения (преобразования Фурье) и составлены таблицы, которые приведены в справочниках.
Рассмотрим без вывода некоторые из них.
4. Гармонический сигнал .
![]() . (4.62)
. (4.62)
Корреляционная функция и спектральная плотность гармонического сигнала имеют вид:
 (4.63)
(4.63)
Графическое изображение представлено на рисунке 4.16:
Рис. 4.16. Корреляционная функция и спектральная плотность гармонического сигнала
Из графика (а) видно, что мощность сигнала сосредоточена на двух частотах (для реального физического сигнала – на одной частоте w1 ).
5. Периодический сигнал, разлагаемый в ряд Фурье .
 . (4.64)
. (4.64)
Спектральная плотность данного сигнала описывается выражением:
 . (4.65)
. (4.65)
Графическое изображение представлено на рис. 4.17:

Рис. 4.17. Спектральная плотность суммы гармоник
Если процесс X (t ), кроме периодической части, будет содержать непериодическую случайную составляющую, то спектр этого процесса будет содержать импульсные и непрерывную составляющие (рис. 4.18).
Рис. 4.18. Спектральная плотность случайной и гармонической
составляющих сигнала
Если процесс X (t ) не содержит периодической части, то он будет иметь непрерывный спектр без ярко выраженных пиков.
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. 4-е изд. перераб. и доп. – СПб.: изд-во «Профессия», 2004.
2. Пугачёв В.С., Синицин И.Н. Теория стохастических систем. – М.: Логос, 2004.
3. Сборник задач по теории автоматического регулирования и управления /Под ред. В.А. Бесекерского. – М.: Наука, 1987.
4. Андреев И.И. Теория статистически оптимальных систем управления. – М.: Наука, 1985.
5. Астапов Ю.М., Медведев В.C. Статистическая теория систем автоматического регулирования и управления. – М.: Наука, 1987.
6. Прикладные математические методы анализа в радиотехнике /Под ред. Г.В. Образцова. – М.: Высш. шк., 1989.
7. Шахтарин Б.И. Случайные процессы в радиотехнике. – М.: Радио и связь, 2000.
8. Пугачёв В.С. Основы автоматического управления. – М.: Наука, 1974.
9. Казаков И.Е., Артемьев В.М. Бухалёв В.А. Анализ систем случайной структуры. – М.: Физматлит, 1993.
10. Андриевский Б.Р., Фрадков А.Л. Элементы математического моделирования в программных средах MATLAB-5 и Scilab. – СПб: Наука, 2000.
Св. план 2006, поз. 35
Учебное издание
Лобатый Александр Александрович,
Русак Леонид Владимирович,
Чумаков Олег Анатольевич
РАСЧЕТ СИСТЕМ УПРАВЛЕНИЯ ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ
Конспект лекций
для студентов специальности
I-53 01 07 «Информационные технологии и управление
в технических системах»
дневной формы обучения
В 2-х частях
Часть 1
Ответственный за выпуск О.А. Чумаков
![]() Подписано в печать Формат 60´84 1/16. Бумага офсетная.
Подписано в печать Формат 60´84 1/16. Бумага офсетная.
Гарнитура «Таймс». Печать ризографическая. Усл. печ. л. 4,3.
![]() Уч.-изд.л. 4,3. Тираж 250 экз. Заказ 189.
Уч.-изд.л. 4,3. Тираж 250 экз. Заказ 189.
Издатель и полиграфическое исполнение: Учреждение образования
«Белорусский государственный университет информатики и радиоэлектроники»
ЛИ №02330/0056964 от 01.04.2004. ЛП №02330/0131518 от 30.04.2004.
220013, Минск, П.Бровки, 6.