| Скачать .docx |
Курсовая работа: Конструирование многомерных регуляторов смесительного бака
Курсовой проект
по курсу Системный анализ и теория сложных систем управления
Введение
Проблема модернизации системы управления смесительного бака с целью улучшения его техника – экономических показателей требует решения следующих задач.
Исследование свойств технологического агрегата как многомерной системы для чего необходимо провести эквивалентное и аппроксимационое преобразование модели; провести анализ качественных и количественных свойств системы; идентифицировать многомерную математическую модель по данным эксперимента.
Конструирование многомерных регуляторов для рассматриваемого смесительного бака:
П. – регулятор, апериодический регулятор, децентрализованный регулятор, надежный регулятор, блочно – иерархический регулятор, регулятор для билинейной и для нелинейной модели, программный регулятор.
Оценка качества в замкнутой автоматической системы регулирования и выбор наилучшего типа регулятора.
1. Исследование свойств технологического агрегата как многомерной системы
1.1 Многомерная математическая модель агрегата
1.1.1 Нелинейная модель агрегата
Вывод нелинейной модели агрегата. На примере рассмотрим конкретную техническую систему – смесительный бак:

Рисунок 1. Модель бака
F1 ,F2 ,F - потери жидкости на истоке и притоке системы, м3 /с;
C1 ,C2 ,C - концентрация на истоке и притоке системы, Кмоль/м3 ;
h - уровень жидкости в баке, м;
S - площадь бака,м2 ;
V - объем жидкости в баке,м3 ;
Запишем уравнение системы в стационарном (установленном) состоянии, когда приток равняется истоку (уравнение материального баланса):
F10
+F20
-F0
=0 ; C1
![]() ,
,
где индекс 0 означает установившееся состояние.
Записавши условия баланса кинетической и потенциальной энергии на выходе из бака (имеется в виду, что жидкость вытекает самостоятельно)
![]() ,
,
где
p - плотность жидкости, кг/м3 ;
w - скорость истока, м/с;
q - ускорение свободного падения,q=9.81 м/с2 ;
и допуская, что
d - диаметр выходного трубопровода, м.
Получим:
![]() ,
,
![]() ,
,
где
k – коэффициент.
При изменении потерь в системе происходит накоплении вещества и переход до нового установленного состояния. Этот переходный процесс описывается дифференциальными уравнениями

Где dv/dt
– приращение объема жидкости, ![]() - прирост массы жидкости.
- прирост массы жидкости.
Приведем эту систему в стандартном состоянии:
Обозначим:

![]() – изменение во времени отклонения потери от номинального по отношению к первому каналу.
– изменение во времени отклонения потери от номинального по отношению к первому каналу.
![]() – изменение во времени отклонения потери от номинального по отношению ко второму каналу.
– изменение во времени отклонения потери от номинального по отношению ко второму каналу.

![]() – изменение во времени отклонения объема от номинального в баке;
– изменение во времени отклонения объема от номинального в баке;
![]() – отклонение концентрации от номинального значения;
– отклонение концентрации от номинального значения;

![]() – изменение потерь на выходе;
– изменение потерь на выходе;
![]() – изменение концентрации на выходе.
– изменение концентрации на выходе.
1.1.2 Запишем нелинейную модель в стандартной форме
Рассмотрим наполнение бака от 0 до номинального значения расхода с учетом прироста, приданного в линеаризованной модели. Таким образом, рассмотрим скачок u 1 =0,03; u 2 =0.
Обозначим ![]() , уравнение бака запишем в виде системы:
, уравнение бака запишем в виде системы:


![]()


![]()
Подставляя ![]() и u
=0.063
, найдем время, которое соответствует указанным значениям. Сведем результаты в таблицу.
и u
=0.063
, найдем время, которое соответствует указанным значениям. Сведем результаты в таблицу.
Таблица 1. Линеаризация системы по первому выходу
| 1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
| y1 |
0.251 |
0.252 |
0.253 |
0.254 |
0.255 |
0.256 |
0.257 |
0.258 |
0.259 |
0.26 |
| t |
0 |
0.841 |
1.785 |
2.86 |
4.106 |
5.584 |
7.402 |
9.753 |
13.081 |
18.793 |
Т.к. нет аналитической зависимости ![]() , используем ее кусочно-линейную аппроксимацию, представляя на промежутке от
, используем ее кусочно-линейную аппроксимацию, представляя на промежутке от ![]() до
до ![]() функцию
функцию ![]() как
как ![]() . Тогда,
. Тогда,

![]()
Занесем полученные значения в таблицу:
Таблица 2 Результаты промежуточного расчета
| a |
0.00119 |
0.00106 |
0.00093 |
0.0008 |
0.00068 |
0.00055 |
0.00043 |
0.0003 |
0.00018 |
| b |
0.251 |
0.252 |
0.253 |
0.254 |
0.255 |
0.256 |
0.257 |
0.258 |
0.259 |

Полученные значения занесем в таблицу:
Таблица 3. Линеаризация системы по второму выходу
| y2 |
3.2012735 |
3.2011172 |
3.2009393 |
3.2007371 |
3.2005089 |
3.2002573 |
3.1999954 |
3.1997612 |
3.1996304 |
| t |
0 |
0.841 |
1.785 |
2.86 |
4.106 |
5.584 |
7.402 |
9.753 |
13.081 |
1.1.3 Получение квадратичной модели
Уравнение квадратичной системы имеет вид:
![]()
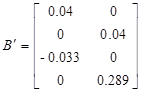
Матрицы с подстановкой номинального режима:




1.1.4 Запись билинейной модели
Уравнение билинейной системы записывается в виде

Приняв допущение, что критерий оптимальности в форме О.А. Красовского

регулятор определяется по зависимости ![]()
Где матрица определена как ![]()
1.1.5 Линеаризованная модель
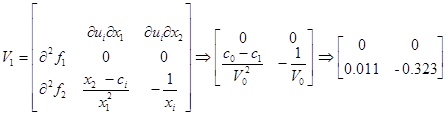
Линеаризуем зависимость ![]() , разложив ее на ряд Тейлора.
, разложив ее на ряд Тейлора.
![]()
![]()
![]()
![]()

С учетом ранее изложенного запишем:
![]()
![]() ; (т.к.
; (т.к. ![]() ), где
), где ![]() ;
;
![]()
Припустив в случае остатка ![]() . Тогда, подставив производную
. Тогда, подставив производную ![]() , получим
, получим
![]()
![]()
![]()

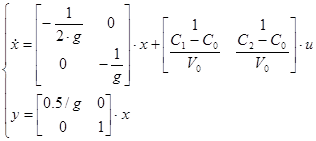
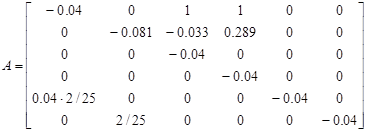
Представим систему в матричной форме:
![]()
Тогда матрицы А и В запишутся в виде
 ,
, 
Для определения матрицы С
необходимо установить связь между векторами x и y. Т.к. ![]() ,
, ![]() , то
, то
![]() ;
; ![]()
![]() , то
, то ![]()
Тогда
![]()
Система будет иметь вид
Коэффициенты модели системы:

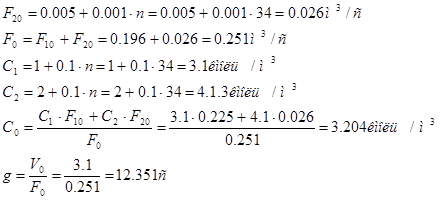
![]()
![]()
![]()
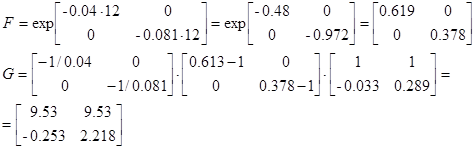
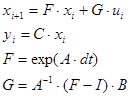
1.1.6 Модель в дискретном времени
Система в дискретном времени имеет вид:

dt= 24 c.
![]()

Зададим ![]() ,
, ![]() , получим значения на выходах дискретной системы.
, получим значения на выходах дискретной системы.
Таблица 4 Значение выходов дискретной системы
| Возмущение |
Реакция выхода системы y(t) |
|||||||
| u1=0.01 u2=0 |
y1 y2 |
0 0 |
0.00384 -0.00254 |
0.00624 -0.00352 |
0.0077 -0.03896 |
0.00859 -0.004038 |
0.00913 -0.00409 |
0.00947 -0.00411 |
| время t, с |
0 |
12 |
24 |
37 |
49 |
61 |
74 |
|
1.1.7 Преобразование модели в форме Ассео
![]()
![]()
![]()
![]()
![]()
Внешне связное форму получаем из матрицы передаточных функций





![]()
1.1.8 Вычисление МПФ системы
![]()
![]() ;
;![]() ;
; ![]() ; n=2; i=1;
; n=2; i=1; ![]()
![]()
![]()
![]()

![]()
![]()


1.1.9 Структурные схемы системы в исходной форме, форме Ассео, ВСП
![]()
![]()
![]()

Рисунок 1. – Структурная схема в исходной форме
![]()
![]()
![]()
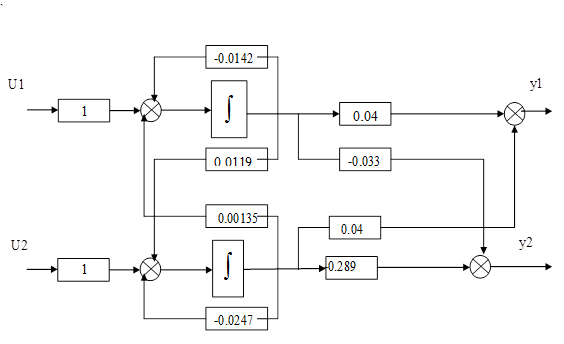
Рисунок 2. – Структурная схема в форме Ассео


![]()

Рисунок 3. – Структурная схема в форме ВСП
1.1.10 Линеаризованная модель в непрерывном и дискретном времени с датчиками и ИМ
a) ![]()
![]()
![]()

Рисунок 4. – Структурная схема системы в непрерывном времени

![]()
б) в дискретном времени

Рисунок 5. – Структурная схема системы в дискретном времени

![]()
![]()
![]()
1.1.11 Модель с генератором возмущений
Соединив последовательно модель шумов с моделью системы, в общем случае запишем новою модель системы в виде
w 1= w 2=100; g 1= g 2=0.02
![]()
где
![]() - белый шум
- белый шум



![]()
1.1.12 Условие правомерности децентрализации
Система в форме Ассео:
![]()
![]()
![]()
Для децентрализованной системы
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Спектральная норма матрицы С’, то есть максимальное сингулярное число матрицы:
![]()
Спектральная норма матрицы F:

Погрешность составляет:
![]()
Можно предположить, что децентрализация является допустимой. Децентрализованная модель запишется в виде:
![]()
![]()
![]()
1.2 Анализ качественных свойств системы
а) ![]()

Следовательно, матрица является гурвицевой.
б) ![]()

max s1(A)=||A||2= 0.081<1
Следовательно, матрица А является нильпотентной.
Проверить, является ли система (А, В, С) постоянной, управляемой, наблюдаемой, идентифицируемой с вектор - столбцом х = (1; 1.25), параметрически инвариантной, минимальнофазовой, расцепимой, астатической.
а) постоянство:

Следовательно, система является постоянной.

Следовательно система является постоянной.
б) управляемость:
![]()
![]() ;
; ![]()
![]()
По первому входу:
![]()
![]()
Система управляема по первому входу.
По второму входу:
![]()
![]()
Система управляема по второму входу.
в) наблюдаемость:
![]()

Система наблюдаема.
г) идентифицированость

Система идентифицируема.
д) параметрическая инвариантность:

Система не инвариантна относительно отклонения dA.
![]()
Система не инвариантна относительно отклонения dB.
![]()
Система не инвариантна относительно отклонения dС.
е) минимальнофазовость и астатичность:
![]()


![]() система является минимальнофазовой и астатической.
система является минимальнофазовой и астатической.
ж) расщепление:
![]()
![]()
![]()
![]() .
.
1.3 Исследование процессов в системе и анализ количественных свойств системы
1.3.1 Построение графиков кривой разгона непрерывной системы
Построение графика решения у(t) для системы {А, В, С}, если ![]() и
и ![]()

Таблица 5 Значение выходов непрерывной системы
|
|
Реакция выхода системы y(t) |
||||||||||
| u1=0 u2=0,01 |
Y1 Y2 10 -3 |
0 |
3.874 |
6.247 |
7.701 |
8.591 |
9.137 |
9.471 |
9.676 |
9.802 |
9.878 |
| 0 |
-2.548 |
-3.523 |
-3.896 |
-4.038 |
-4.093 |
-4.114 |
-4.122 |
-4.125 |
-4.126 |
||
| u1=0,01 u2=0 |
Y1 Y2 |
0 |
3.874 |
6.247 |
7.701 |
8.591 |
9.137 |
9.471 |
9.676 |
9.802 |
9.878 |
| 0 |
0.023 |
0.03 |
0.034 |
0.035 |
0.035 |
0.036 |
0.036 |
0.036 |
0.036 |
||
| время t, с |
0 |
12 |
24 |
37 |
49 |
61 |
74 |
86 |
98 |
111 |
|
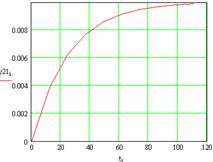
Рисунок 6 – Реакция первого выхода на возмущения u1(t)

Рисунок 7 – Реакция второго выхода на возмущения u1(t)

Рисунок 8 – Реакция первого выхода на возмущения u2(t)

Рисунок 9 – Реакция второго выхода на возмущения u2(t)
1.3.2 Построение графиков кривой разгона дискретной системы
Система в дискретном времени имеет вид:
dt=24 c.
![]()
![]()
![]()
Зададим ![]() ,
, ![]() ,
получим значения на выходах дискретной системы, которые совпадают с расчетом задания в п.4.
,
получим значения на выходах дискретной системы, которые совпадают с расчетом задания в п.4.
Таблица 6 Значение выходов дискретной системы
| Возмущение |
Реакция выхода системы y(t) |
|||||||||||
| u1=0.01 u2=0 |
y1 y2 10-3 |
0 |
0 |
3.874 |
6.247 |
7.701 |
8.591 |
9.137 |
9.471 |
9.676 |
9.802 |
9.878 |
| 0 |
0 |
-2.548 |
-3.523 |
-3.896 |
-4.038 |
-4.093 |
-4.114 |
-4.122 |
-4.125 |
-4.126 |
||
| такт |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|


Рисунок 10 – Реакция выходов системы на возмущения u (t)
1.3.3 Построение графиков кривой разгона нелинейной системы
Данные для построения графиков получены в пункте 1.1.2
Для первого выхода пользуемся таблицей 1. Получившиеся графики можем сопоставить с графиками полученным в пункте 1.3.1, введя поправку на начальное значение параметра

Рисунок 11 – Реакция первого выхода на возмущения u1(t) в пункте 1.3.1

Рисунок 12 – Реакция первого выхода на возмущение для линеаризованной системы
Легко видеть, что эти график совпадают, что говорит о том, что линеаризация по первому выходу проведена на приемлемом уровне

Рисунок 14 – Реакция второго выхода на возмущения u1(t) полученного в пункте 1.3.1

Рисунок 13 – Реакция второго выхода на возмущения для линеаризованной системы
В данном случае имеет место погрешность которую можно связать с ошибкой вносимой кусочно – линейной аппроксимации.
1.3.4 Установившиеся состояния системы
Вычислить постоянное значение состояния системы в условиях


Т.к. установившееся значение предполагает отсутствие динамики, то систему можно записать в следующем виде
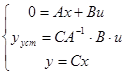
![]()
1.4 Идентификация многомерной математической модели по данным эксперимента
1.4.1 Активная идентификация
Для дискретной формы системы ( F , G , C ) из пункта 3. 1. провести реализацию системы.
Запишем систему в виде:
![]()
![]()
![]()
![]()
Подавая импульс по первому входу, рассчитаем:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Теперь имея экспериментальные данные, сгруппировав их в матрицы H и H 1 можем приступить к их обработки.
![]()
![]()
![]()
![]()
Из собственных векторов от (![]() ) и (
) и (![]() ) построим:
) построим:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Для проверки идентификации найдем коэффициент передачи системы
![]()
Коэффициент передачи, вычисленный по исходным матрицам
![]()
![]()
![]()
![]()
Можно сделать вывод о том, что система идентифицирована, верно
1.4.2 Пассивная идентификация
Для дискретной формы системы (F, G, C) из пункта 3. 1. провести пассивную идентификацию системы, предполагая, что вектор входа изменяется соответственно таблице:
Таблица 7 Значение вектора входа для пассивной идентификации.
| Такт, n |
0 |
1 |
2 |
3 |
4 |
5 |
| U(n) |
0.01 |
0 |
0 |
0.04 |
0 |
0 |
| 0 |
0.01 |
0.02 |
0 |
0.03 |
0 |
![]()
![]()
![]()
Используя матрицы системы в дискретной форме для заданных значений вектора входа, рассчитаем значения вектора выхода

Результаты расчета сведем в таблицу:
| Такт, n |
1 |
2 |
3 |
4 |
5 |
6 |
| y(n) |
0.003935 |
0.006321 |
0.012 |
0.023 |
0.026 |
0.016 |
| -0.0026 |
0.022 |
0.053 |
0.0091 |
0.071 |
0.026 |
Используя данные эксперимента (Таблица 8) можем приступить непосредственно к определению параметров идентифицированной системы
Тогда



![]()
Для проверки идентификации найдем коэффициент передачи системы
![]()
Система идентифицирована, верно
2. Конструирование многомерных регуляторов, оптимизирующих динамические свойства агрегата
2.1 Конструирование П. - регулятора, оптимизирующего систему по интегральному квадратичному критерию
Регулятор состояния, который оптимизирует систему по критерию:
![]()
![]()
Определяется по соотношениям:
P=LR1(A,B,Q,R); ![]()
![]()
![]() При этом Q=R=I
При этом Q=R=I
![]()
Т.к. матрица С. является инвертированной, для образования регулятора выхода нет необходимости конструировать наблюдатель состояния – недосягаемое состояние просто вычисляется по формуле ![]() .
.
![]()
Следовательно, регулятор выхода имеет вид ![]()
![]()
2.2 Конструирование компенсаторов заданий и измеряемых возмущений
Обозначивши через z заданное значение выхода y и припуская, что ![]() , получим
, получим

![]()
Приняв во внимание, что А=В

Если при компенсации возмущений и заданий учесть «стоимость» управления, записавши критерий в виде
![]() ,
,
то компенсаторы (оптимальные) определяются зависимостями
![]()
![]()

Значение выхода при действии возмущения f в системе без компенсаторов при z=0
![]()
а также с оптимальным компенсатором.
![]()
2.3 Конструирование регулятора с компенсатором взаимосвязей
![]()
![]()
Проверим, или регулятор действительно расцепляет систему, т.е. матрица передаточных функций является диагональной

Используя V как новый вход можно далее записать
![]()
![]()
Регулятор выхода можно записать в виде
![]()
2.4 Конструирование апериодического регулятора
Апериодический регулятор для дискретной системы может быть получен: из условия ![]() . Запишем
. Запишем ![]()
![]()
![]()
2.5 Конструирование децентрализованного регулятора
Используя форму Ассео, запишем:

![]()

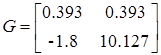
![]()
Следовательно, получим ![]()
![]()
Для определения критерия

2.6 Конструирование надежного регулятора
Если матрица G
моделирует отказы каналов измерения, то регулятор находится в виде ![]()
![]()
Берем s=0.04 При этом значении выполняются необходимые условия:
![]()
s>![]()
Результат решения уравнения Ляпунова первого типа
![]()
Коэффициент передачи надежного регулятора
![]()
Поверим систему с регулятором на устойчивость
![]()
Следовательно, система является постоянной при любых отклонениях.
2.7 Конструирование блочно-иерархического регулятора
Воспользуемся регулятором состояния и проверим или можно создать последовательность регуляторов состояния.
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]()
![]()
![]()
![]()
|
|
|
|

Рисунок 15 – Иллюстрация монотонного уменьшения величины критерия

Рисунок 16 – Схема блочно – иерархического регулятора
2.8 Конструирование регулятора для билинейной модели
Билинейный регулятор определяется по следующей зависимости

![]()

Вводя все компоненты в уравнение, получаем:
![]()
![]()
2.9 Конструирование регулятора для нелинейной модели
Сконструировать нелинейный регулятор, используя начальную неупрощенную модель бака.
Расчетное соотношение для регулятора –
![]()
e=z – x 

2.10 Конструирование программного регулятора
Используя линеаризованную модель в дискретном времени, записать программу перевода системы из состояния ![]() в состояние
в состояние
![]()
![]() ;
; ![]()

3 . Анализ свойств сконструированной системы с оптимальным П регулятором
3.1 Построить процесс в системе с П. регулятором
Для построения процесса графика необходимо пользоваться следующую формулу
![]()
В итоге получаются следующие графики переходных процессов. Для сравнения приведены переходные процессы для систем без компенсаторов (штрихованная линия)


Рисунок 17 – Сопоставление качеств переходного процесса первого и второго выхода с компенсатором и без него.
Из графика видно, что система выходит на установившееся значение раньше если на ней стоит компенсатор.
3.2 Вычислить критерий оптимальности в системе
Величина критерия с удельным регулятором вычисляется
![]()
![]()
Отклонение параметров на 10 процентов

![]()
![]()
Отклонение параметров на 5 процентов
![]()
![]()
![]()
Матрицы чувствительности будут рассчитаны в пункте 3.4:
![]()
![]()
![]()
В конечном счете, получаем
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
3.3 Оценить потерю качества от децентрализации
Коэффициент передачи децентрализованного регулятора найден в пункте 2.5
![]()
Для определения критерия

3.4 Вычислить чувствительность системы
dJ/dA, dJ/dВ, dJ/dС, dJ/dК
для системы (А1,В, С), где А1=А+В*К, К=![]() *Р.
*Р.
Матрицы А1 и P (решение уравнения Риккати) Pлп (решение уравнения Ляпунова ) рассчитывались ранее
![]()
![]()
![]()
Для расчета матрицы V следует решить уравнение Ляпунова вида:
А1 *V+V* А1 + I=0
Таким образом :
![]() ;
; ![]() ;
;
Все необходимые составляющие для расчета чувствительности у нас есть:
dJ/dA=2∙P∙V==![]() ;
;
dJ/dВ=2∙P∙V∙![]() =
=![]() ;
;
dJ/dС=2∙![]() ∙
∙![]() ∙P∙V+2∙
∙P∙V+2∙![]() ∙K∙V=
∙K∙V=![]() ;
;
dJ/dК =
2∙K∙V+2∙![]() ∙P∙V=
∙P∙V=![]()
3.5 Анализ робастности системы с надежным регулятором
Матрицы отклонения начальной системы
![]()
![]()
![]()
То есть аа=0.00 8 1; bb =0.0 289 ; cc =0.00 4 .
Подставляя значения, полученные в пункте 2.6
![]()
в уравнение Scherzinger найдем из нее новую матрицу

Т.к. определенная матрица положительно определенная
![]()
то сконструированная система робастная поэтом стационарная и при изменении параметров в расчетных диапазонах величина критерия изменяется очень мало.
3.6 Решение обратной задачи конструирования
Записав расцеплояющей регулятор в виде
![]()
Далее используя соотношение

где W – произвольная матрица выбирается из условия S >0

![]()
В конечном счете, получаем

4. Результат вспомогательных расчетов
1.Решение уравнения Риккати первого типа
Заданы матрицы
![]()
![]()
Сформируем матрицу М

Найдем ее собственные значения
![]()
Выполним преобразование подобия
![]()

![]()
![]()
Решение уравнения Риккати
![]()
2.Решение уравнения Ляпунова
![]()
![]()


![]()
3. Вычисление матричной экспоненты

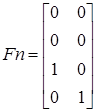
4.Опеделение Фробениусовой матрицы
![]()
![]()
![]()
![]()
![]()
5. Определение Вандермодовой матрицы

В ыводы
Исследован технический объект – смесительный бак. Получен спектр модели: линейная, нелинейная, экспериментальная и аналитическая модель. Проведены эквивалентное аппроксимационое преобразование модели агрегата
Исследованы качественные и количественные свойства системы. Разработаны регуляторы управления объектом: П. – регулятор;
апериодический регулятор; надежный регулятор; блочно – иерархический регулятор; регулятор для билинейной и для нелинейной модели; программный регулятор; регулятор с компенсатором взаимосвязей. А также компенсаторы возмущений и компенсаторы на задании.
Проанализированы процессы в сконструированной системе с регулятором в качественном и количественном отношении (построен процесс в системе с регулятором, вычислен критерий оптимальности, проанализирована робастность, решена обратная задачи конструирования ).
На основании данного анализа можно сделать вывод о том, что наиболее подходящим регулятором для рассмотренной системы является оптимальный П. – регулятор. Хотя он и обладает некоторым перерегулированием, имеет небольшую статическую ошибку (при отсутствии компенсатора на задание), однако все эти недостатки компенсируются его простотой в установке и обслуживании. Помимо этого он обладает наименьшим временем переходного процесса, неплохим показателем критерия оптимальности. В силу своей простоты он является более надежным в том плане, что вероятность выхода из строя самого регулятора мала.
Литература
1. Стопакевич А.А., Методические указания к практическим занятиям по курсу « Основы системного анализа и теория систем » для бакалавров по автоматики. – Одесса: ОНПУ, 1997.
2. Стопакевич А.А. Сложные системы: анализ, синтез, управление. – Одесса: ОНПУ 2004