| Скачать .docx |
Курсовая работа: Электромеханический интегратор
Оглавление
Введение Принципиальная схема исходной САР
1. Нелинейная САР
1.1. Составление структурной схемы нелинейной САР, при условии, что усилительное устройство является нелинейным элементом (НЭ)
1.2. Приведение структурной схемы нелинейной САР к типовой и получение передаточной функции линейной части системы
1.3. Получение дифференциального уравнения гармонически линеаризованной нелинейной системы
1.4. Оценка устойчивости гармонически линеаризованной нелинейной системы методом Гольдфарба
1.5. Построение переходной характеристики и определение по ней показателей качества гармонически линеаризованной нелинейной системы САР при нулевых начальных условиях
1.6. Исследование устойчивости положения равновесия системы в целом, по критерию абсолютной устойчивости Попова В.М
2. Линейная импульсная САР
2.1. Формирование схемы импульсной системы
2.2. Передаточная функция непрерывной части импульсной системы ![]()
2.3. Определение период квантования по теореме Котельникова
2.4. Передаточные функции системы в разомкнутом и замкнутом состоянии ![]() и
и ![]()
2.5. Проверка на устойчивость системы по корням характеристического уравнения
2.6. Проверка на устойчивость системы по аналогу критерия устойчивости Михайлова
2.7. Дискретный выходной сигнал системы, его аппроксимация и показатели качества импульсной САР при нулевых начальных условиях
2.8. Полная ошибка регулирования импульсной САР при изменении задающего воздействия по закону ![]() м/с, возмущающего -
м/с, возмущающего - ![]()
Введение Принципиальная схема исходной САР
Электромеханический интегратор

Рис.1. Принципиальная схема электромеханического интегратора
Структурная схема исходной САУ

Рис. 2. Структурная схема
Параметры системы
| с | с | с | с | H*м | ||||||||||
| 0,05 | 0,05 | 23,1 | 30 | 0,02 | 0,35 | 24,5 | 0 | 10,5 | 16 | 0,01 | 0,27 | 0,01 | 3,6 | 3 |
1. Нелинейная САР
Нелинейной системой автоматического регулирования называется такая система, которая содержит хотя бы одно звено, описываемое нелинейным уравнением.
Виды нелинейных звеньев:
1) звено релейного типа;
2) звено с кусочно-линейной характеристикой;
3) звено с криволинейной характеристикой любого очертания;
4) звено, уравнение которого содержит произведение переменных или их производных и другие их комбинации;
5) нелинейное звено с запаздыванием;
6) нелинейное импульсное звено;
7) логическое звено;
8) звенья, описываемые кусочно-линейными дифференциальными уравнениями, в том числе переменная структура. [3]
1.1. Составление структурной схемы нелинейной САР, при условии, что усилительное устройство является нелинейным элементом (НЭ)
Исходя из задания, необходимо принять усилительное устройство системы нелинейным элементом. В системе автоматического регулирования электромеханического интегратора таким устройством является тиристорный преобразователь.
Тип нелинейной статической характеристики нелинейного элемента выбран согласно заданию для тиристорного преобразователя:

Рис. 1.1 Статическая характеристика НЭ
![]()


Функция нелинейной части системы с данной характеристикой имеет вид:
![]() , где
, где
![]()
![]()
Составим структурную схему нелинейной САР:

Рис.1.2 Структурная схема нелинейной САР.
1.2. Приведение структурной схемы нелинейной САР к типовой и получение передаточной функции линейной части системы
Типовая структурная схема имеет вид:

Для того, чтобы привести структурную схему нелинейной САР к типовой, воспользуемся правилами приведения структурной схемы к типовой:
1. Отбрасываются все входные воздействия и цепи, прилегающие к ним. Цепочку обратной связи делаем продолжением главной цепи:

2. На входе НЭ добавляем дополнительный сумматор. После НЭ ставим единичный блок:

3. Начинаем составлять структурную схему с введенного сумматора, перемещаясь по структурной по ходу движения сигнала до введенного сумматора:

4. После этого дорисовываем местные обратные связи и дополнительные каналы, если они есть в схеме:

5. Если НЭ имеет инерционность, то передаточная функция НЭ разбивается на два звена. Коэффициент передачи НЭ учитывается в статической характеристике, а инерционность остается в передаточной функции НЭ:

Рис. 1.3 типовая схема нелинейной САР
Таким образом, получили типовую схему нелинейной САР(рис. 1.3.)
1.3. Получение дифференциального уравнения гармонически линеаризованной нелинейной системы
Для нахождения дифференциального уравнения гармонически линеаризованной нелинейной системы воспользуемся выражением:
![]() , (1)
, (1)
где ![]()

Подставив полученные значения в выражение (1), получим:

Подставим численные значения:

Так как ![]() тогда
тогда ![]()
Запишем дифференциальное уравнение:
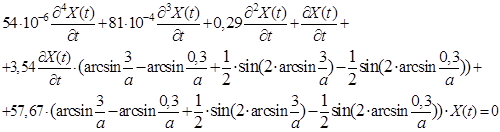 (2)
(2)
Выражение (2) - дифференциальное уравнение гармонически линеаризованной нелинейной системы.
1.4. Оценка устойчивости гармонически линеаризованной нелинейной системы методом Гольдфарба
Метод Гольдфарба - графический способ определения параметров автоколебаний.
![]() - характеристическое уравнение
- характеристическое уравнение
Если характеристическое уравнение приравнять к нулю, то можно записать границу устойчивости системы:
![]()
![]() или
или ![]()
Построим графики двух функций в одном масштабе:
1. ![]()
2. ![]()
Если эти годографы пересекутся, то точка их пересечения определит амплитуду и частоту периодического режима (![]() и
и ![]() ). Если пересечений двух годографов нет, то периодический режим в системе отсутствует.[3]
). Если пересечений двух годографов нет, то периодический режим в системе отсутствует.[3]
Найдем передаточную функцию линейной части:


Строим необходимые годографы в ППП MathCAD:

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Рис. 1.4 Пересечение годографов характеристик ![]() и
и ![]()
Чтобы точнее определить точку пересечения годографов, увеличим график:

Точка пересечения данных характеристик
![]()
Найдем амплитуду и частоту периодического режима (![]() и
и ![]() ):
):

Оценка устойчивости периодического режима
Необходимо дать вариацию амплитуде:
![]()
Если при значении амплитуды ![]() модуль
модуль ![]() возрастает, а при
возрастает, а при ![]() модуль
модуль ![]() уменьшается по сравнению с модулем
уменьшается по сравнению с модулем  , то периодический режим устойчивый и соответствует автоколебаниям.[3]
, то периодический режим устойчивый и соответствует автоколебаниям.[3]
![]()
![]()
![]()
![]()
![]()

Рис. 1.5
По Рис.1.5. наглядно убедились, что автоколебания в системе устойчивы
Если при увеличении амплитуды точка на кривой годографа нелинейной части ![]() пересекает частотную характеристику линейной части
пересекает частотную характеристику линейной части ![]() из внутренней ее области во внешнюю, то периодический режим в системе устойчив.
из внутренней ее области во внешнюю, то периодический режим в системе устойчив.
О выполнении данного условия можно убедиться из рис. 1.4.
Таким образом, проведя исследование САР электромеханический интегратор на устойчивость по методу Гольдфарба, убедились, что данная система автоматического регулирования является устойчивой.
1.5. Построение переходной характеристики и определение по ней показателей качества гармонически линеаризованной нелинейной системы САР при нулевых начальных условиях
Для построения переходной характеристики гармонически линеаризованной нелинейной САР воспользуемся ППП Matlab 6.5:
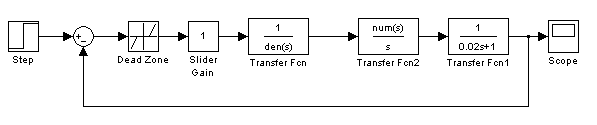
Рис. 1.6 Структурная схема системы в ППП Matlab

Рис. 1.6 Переходная характеристика
Показатели качества САУ.
В теории управления, оценить качество регулирования переходного процесса означает определение по кривой переходного процесса времени регулирования ![]() , перерегулирования
, перерегулирования ![]() %, установившегося значения выходного сигнала
%, установившегося значения выходного сигнала ![]() .
.
1. ![]()
2. ![]()
3. Время регулирования – минимальное время, по истечению которого регулируемая величина остается близкой к установившемуся значению.
![]()
4. Перерегулирование - максимальное отклонение выходной величины ![]() на интервале переходного процесса от установившегося
на интервале переходного процесса от установившегося ![]() после окончания переходного процесса, выраженное в процентах.
после окончания переходного процесса, выраженное в процентах.

Допустимое перерегулирование:
![]()
Перерегулирование в САР равно 0%, что говорит о качественности системы.
1.6. Исследование устойчивости положения равновесия системы в целом, по критерию абсолютной устойчивости Попова В.М
Этот критерий является частотным (используется частотная характеристика). Критерий является достаточным (если выполнятся, то система устойчива; если он не выполняется, то система может быть устойчива и не устойчива).
Необходимо, чтобы был один однозначный нелинейный элемент (одному значению входного сигнала соответствовало одно значение выходного сигнала).
Критерий Попова:
Для того, чтобы положение равновесия нелинейной системы НСАР с устойчивой линейной частью и однозначной нелинейностью было устойчиво достаточно выполнения следующих условий:
1. действительная часть функции Попова должная быть больше нуля
![]()
2. НЭ должен удовлетворять условию
3. ![]() :
: ![]()


Пусть передаточная функция линейной части имеет вид:
![]()
![]()
Модифицируем:

Отличие модифицированной АФЧХ линейной части от исходной заключается в масштабировании мнимой части в ![]() раз.
раз.
Критерий сводится к неравенству:
![]()
![]() - уравнение кривой Попова
- уравнение кривой Попова
Строим в одной плоскости модифицированный годограф и прямую Попова, используя ППП MathCAD. Модифицированный годограф должен лежать справа от прямой Попова. При этом допускается касание кривых.
![]()
![]()
![]()
![]()

Рис. 1.7
Из графика видно, что точка ![]() лежит правее годографа, и через нее невозможно провести прямую Попова так, чтобы годограф был правее. Можно сделать вывод, что данная система абсолютно не устойчива.
лежит правее годографа, и через нее невозможно провести прямую Попова так, чтобы годограф был правее. Можно сделать вывод, что данная система абсолютно не устойчива.
2. Линейная импульсная САР
Линейной импульсной системой называется такая система автоматического управления, которая кроме звеньев, описываемых линейными дифференциальными уравнениями, содержит импульсный элемент, преобразующий непрерывное входное воздействие в последовательность импульсов.
2.1. Формирование схемы импульсной системы
Амплитудно-импульсный модулятор, который необходимо ввести в схему по ходу движения прямого сигнала после главного сумматора, состоит из последовательно соединенного простейшего импульсного элемента и формирователя нулевого порядка, который, как и линейные звенья системы, описываются дифференциальным уравнением, и имеет передаточную функцию:
![]()
Составим структурную схему проектируемой импульсной системы

Рис.2.1 Структурная схема импульсной системы
2.2. Передаточная функция непрерывной части импульсной системы
Пользуясь правилами приведения структурных схем к типовой, составим передаточную функцию непрерывной части импульсной системы.


Структурная схема импульсной системы примет вид

2.3 Определение период квантования по теореме Котельникова
Процесс преобразования непрерывного сигнала в дискретный называют квантованием сигнала. Различают три способа квантования и, соответственно, 3 класса дискретных систем:
1 класс – релейные системы – системы, в которых присутствует квантование по уровню и отсутствуют все другие виды квантования.
2 класс – импульсные – системы, в которых имеет место квантование по времени и отсутствуют какие-либо другие виды квантования.
3 класс – релейно-импульсные (цифровые) – системы, в которых одновременно присутствует квантование по уровню и квантование по времени.
Теорема Котельникова – Шеннона: при выполнении условия (частота квантования больше максимальной ширины спектра сигнала.), что возможно в условиях ограниченного спектра сигнала и достаточно высокой частоты квантования
![]()
потери информации не происходит, и она может быть полностью восстановлена. То есть из квантованного сигнала можно без потерь восстановить исходный непрерывный сигнал.
Заметим также, что невыполнение условия Котельникова ещё не означает, что восстановление исходного сигнала заведомо невозможно! Теорема Котельникова - Шеннона не является необходимым условием.
Для определения периода квантования ![]() необходимо найти частоту квантования
необходимо найти частоту квантования ![]() . Необходимо построить амплитудно-частотную характеристику передаточной функции непрерывной части импульсной системы и по ней определить частоту квантования.[2]
. Необходимо построить амплитудно-частотную характеристику передаточной функции непрерывной части импульсной системы и по ней определить частоту квантования.[2]
Для построения АЧХ ![]() воспользуемся ППП Matlab 6.5.:
воспользуемся ППП Matlab 6.5.:


Рис. 2.2. АЧХ ![]()
Точка пересечения нулевой амплитуды и амплитудно-частотной характеристики будут определять частоту квантования ![]() .
.
Зная![]() , найдем период квантования
, найдем период квантования ![]() :
:
![]()
Таким образом
![]()
2.4 Передаточные функции системы в разомкнутом и замкнутом состоянии
 и
и 
Передаточная функция разомкнутой импульсной системы определяется по виду структурной схемы проектируемой системы и записывается в виде:
![]()

Рис. 2.3 Структурная схема разомкнутой импульсной системы.
Подставим в формулу выражения передаточных функций звеньев импульсной системы:

где ![]()
![]()
Найдем корни уравнение в ППП MathCAD:


Используя таблицу z-преобразований, определим z-изображение передаточной функции импульсной системы в следующем виде (3):
 (3)
(3)
где ![]() - период квантования импульсной системы
- период квантования импульсной системы
Значения ![]() определим, выполнив следующие преобразования (4):
определим, выполнив следующие преобразования (4):

Преобразовав числитель, получим следующие уравнения, позволяющие определить ![]() :
:

Для расчета ![]() воспользуемся ППП MathCAD:
воспользуемся ППП MathCAD:

В результате, получились следующие значения ![]() :
:

Подставив в выражение (4) значения найденных коэффициентов ![]() , получим:
, получим:

Выполним необходимые преобразования и получим выражение передаточной функции разомкнутой импульсной системы в следующем виде:
![]()
При

Для вычисления ![]() воспользуемся ППП Matlab 6.5:
воспользуемся ППП Matlab 6.5:


![]()
Передаточная функция замкнутой импульсной системы определяется по следующей формуле:

Передаточная функция непрерывной части определяется в виде:
![]()
![]()

Рис. 2.4 Структурная схема замкнутой импульсной САУ
Из этого выражения следует, что значение передаточной функции приведенной непрерывной части отличается от значения передаточной функции разомкнутой импульсной системы на величину коэффициента обратной связи.
Таким образом, получаем:

где ![]()
Представим передаточную функцию разомкнутой импульсной системы в следующем виде:
![]() ,
,
где 
Тогда передаточная функция замкнутой импульсной системы запишется следующим образом:

В результате подсчетов, получили следующие значения передаточной функции разомкнутой импульсной системы и замкнутой соответственно:

2.5 Проверка на устойчивость системы по корням характеристического уравнения

![]() - характеристический полином замкнутой САР.
- характеристический полином замкнутой САР.
Для нахождения характеристическим корней приравняем полином к нулю и найдем необходимые значения.
![]()
Найдем корни в ППП MathCad:

Значения корня ![]() получилось больше единицы, что говорит о неустойчивости данной импульсной системы автоматического регулирования.
получилось больше единицы, что говорит о неустойчивости данной импульсной системы автоматического регулирования.
2.6 Проверка на устойчивость системы по аналогу критерия устойчивости Михайлова
При исследовании устойчивости САУ с АИМ с помощью аналога критерия Михайлова в характеристическом полиноме ![]() :
:
Производят замену ![]() на переменную
на переменную ![]() и на комплексной плоскости строят характеристическую кривую
и на комплексной плоскости строят характеристическую кривую
![]()
Аналог критерия устойчивости Михайлова:
«Замкнутая система с АИМ будет устойчива, если при возрастании ![]() от 0 до
от 0 до ![]() характеристическая кривая
характеристическая кривая ![]() обходит последовательно в положительном направлении
обходит последовательно в положительном направлении ![]() квадрантов комплексной плоскости, где
квадрантов комплексной плоскости, где ![]() - степень характеристического полинома».
- степень характеристического полинома».
Необходимыми условиями (для четных m) являются:
![]()
Подставим значения и проверим, выполняются ли условия:

В результате убедились, что условия не выполняются.
Для построения вектора характеристической кривой замкнутой системы ![]() используем ППП MathCAD:
используем ППП MathCAD:


Степень характеристического полинома исследуемой замкнутой САУ ![]() . Из графика видно, что годограф не входит в данный диапазон частот.
. Из графика видно, что годограф не входит в данный диапазон частот.

В диапазоне частот ![]() годограф начинается на положительной действительной полуплоскости и при изменении
годограф начинается на положительной действительной полуплоскости и при изменении ![]() от 0 до
от 0 до ![]() проходит в положительном направлении всего 3 квадранта, что не удовлетворяет условиям устойчивости системы управления с АИМ.
проходит в положительном направлении всего 3 квадранта, что не удовлетворяет условиям устойчивости системы управления с АИМ.
Таким образом, можно сделать вывод, что исследуемая импульсная САР не устойчива.
2.7 Дискретный выходной сигнал системы, его аппроксимация и показатели качества импульсной САР при нулевых начальных условиях
Найдем передаточную функцию замкнутой импульсной системы и построим ее дискретный выходной сигнал в ППП Matlab 6.5:

Определяем значение передаточной функции замкнутой импульсной системы и строим дискретный выходной сигнал:


Рис. 2.5 Дискретный выходной сигнал системы при ![]()
Из рис.23. видно, что дискретный выходной сигнал неустойчив и расходится при ![]() . Для того, чтобы получить устойчивую систему, необходимо уменьшать период квантования
. Для того, чтобы получить устойчивую систему, необходимо уменьшать период квантования ![]() до определенной величины, пока выходной сигнал при
до определенной величины, пока выходной сигнал при ![]() не будет стремиться к определенному значению.
не будет стремиться к определенному значению.
Таким образом, уменьшая ![]() , получили максимальное значение, больше которого система будет переходить в нестационарный режим работы (будет расходиться).
, получили максимальное значение, больше которого система будет переходить в нестационарный режим работы (будет расходиться).
Находим значение непрерывной части системы и применяем к ней ![]() - преобразование при периоде квантования
- преобразование при периоде квантования ![]() :
:

Определяем значение передаточной функции замкнутой импульсной системы и строим дискретный выходной сигнал:

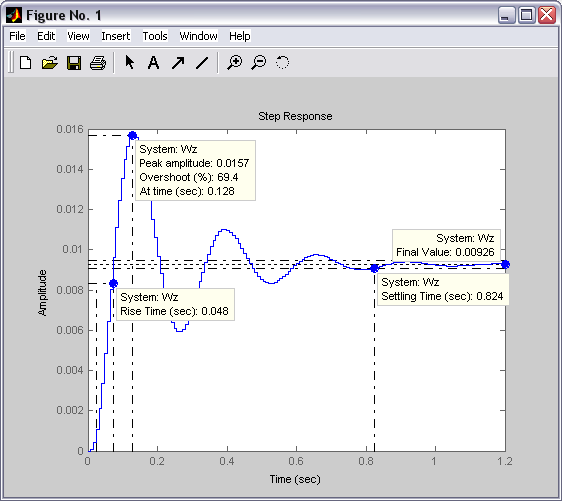
Рис. 2.6 Дискретный выходной сигнал системы при ![]()
Определим показатели качества для рис.2.6.:
· Время регулирования переходного процесса ![]() ;
;
· Установившееся значение выходного сигнала ![]() ;
;
· Максимальное значение выходного сигнала ![]() ;
;
· Перерегулирование ![]() ;
;
· Коэффициент передачи замкнутой системы ![]() ;
;
Данные показатели качества переходного процесса не удовлетворяют требуемым значениям.
2.8. Полная ошибка регулирования импульсной САР при изменении задающего воздействия по закону  м/с, возмущающего -
м/с, возмущающего - 
Полная ошибка регулирования системы автоматического управления находится по следующей формуле:
![]()
где
![]() - ошибка регулирования по задающему воздействию
- ошибка регулирования по задающему воздействию ![]() ;
;
![]() - ошибка регулирования по возмущающему воздействию
- ошибка регулирования по возмущающему воздействию ![]() .
.
Значение ошибки в установившемся режиме работе (при ![]() ) определяется как:
) определяется как:
![]() ,
,
где
![]() - передаточная функция замкнутой САУ по задающему воздействию
- передаточная функция замкнутой САУ по задающему воздействию ![]() при
при ![]() ;
;
![]() - передаточная функция замкнутой САУ по возмущающему воздействию
- передаточная функция замкнутой САУ по возмущающему воздействию ![]() при
при ![]() .
.
Найдем ошибку регулирования по задающему воздействию ![]() в установившемся режиме:
в установившемся режиме:
![]() , (5)
, (5)
где ![]() ,
, 
 ,
,
где 

Таким образом

Найдем значение ![]() при
при ![]() :
:

Найдем производную от передаточной функции по ошибке регулирования при ![]() :
:

Подставив найденные значения в выражение (5) определим ошибку регулирования по задающему воздействию ![]() в установившемся режиме:
в установившемся режиме:
![]()
Найдем ошибку регулирования по возмущающему воздействию ![]() :
:
![]()
Определим значение передаточной функции замкнутой САУ по возмущающему воздействию:

где ![]() - передаточная функция цепи прямого пути прохождения сигнала от возмущающего фактора
- передаточная функция цепи прямого пути прохождения сигнала от возмущающего фактора ![]() .
.
![]()
Найдем z-преобразование для данной передаточной функции:
![]()

Найдем значения корней ![]() характеристического уравнения
характеристического уравнения ![]() :
:

Таким образом
![]() (6)
(6)
Определим значения ![]() , выполнив следующие преобразования:
, выполнив следующие преобразования:

Преобразовав числитель, получим следующие уравнения, позволяющие определить ![]() :
:

Подставим в выражение (6):

Найдем значение передаточной функции замкнуто САУ по возмущающему воздействию:
Пусть ![]() , тогда
, тогда
![]()

Определим ![]() при
при ![]() :
:

В результате получим
![]()
Найдем полную ошибку регулирования импульсной САР в установившемся режиме работы:
![]()