| Скачать .docx | Скачать .pdf |
Реферат: Мікропроцесорні пристрої
Міністерство освіти і науки України
Донбаська державна машинобудівна академія
Методичні вказівки до лабораторного практикуму
з дисципліни “Мікропроцесорні пристрої”
(для спеціальності 7.092203 ―Електромеханічні системи автоматизації та електропривод‖)
Частина 2
Затверджено на методичній раді ДДМА
Протокол № від 2006 р.
Краматорськ 2007
УДК 681.3
Методичні вказівки до лабораторного практикуму з дисципліни
―Мікропроцесорні пристрої‖ (для спеціальності 7.092203
―Електромеханічні системи автоматизації та електропривод‖) / Укл. О.М. Наливайко. – Краматорськ: ДДМА, 2007. - 98 с.
Викладені основні відомості про мікроконтролери сімейства PIC та основи їх програмування. Наведені індивідуальні завдання та контрольні питання для виконання лабораторних робіт на навчальних стендах PICDEM 2 PLUS
Укладач О.М. Наливайко, доц.
Відповід. за випуск О.М. Наливайко, доц.
Зміст
Вступ....................................................................................................5
1 КОРОТКИЙ ОПИС ОДНОКРИСТАЛЬНИХ МІКРОКОНТРОЛЕРІВ РІС
1.1 Загальні відомості........................................................................6
1.2 Особливості структурної організації.........................................8
1.2.1 Набір регістрів........................................................................9
1.2.2 Сторожовий таймер WDT.....................................................10
1.2.3 Тактовий генератор .............................................................11
1.2.4 Схема скидання……………….............................................11
2 МІКРОКОНТРОЛЕР PIC16F877
2.1 Характеристика мікроконтролера.............................................11
2.2 Cтруктурна схема мікроконтролера PIC16F877......................12
2.3 Організація пам'яті.......................................................................15
2.3.1 Пам‘ять програм...................................................................15
2.3.2 Організація пам'яті даних......................................................16
2.4 Регістр стану STATUS .............................................................19
2.5 Регістр OPTION.........................................................................20
2.6 Регістр INTCON........................................................................22
2.7 Лічильник команд.....................................................................23
2.8 Стік...............................................................................................24
2.9 Порти введення/виводу...............................................................24
2.9.1 Регістри PORTА і TRISA.....................................................25
2.9.2 Регістри PORTB і TRISB.....................................................26
2.9.3 Регістри PORTC і TRISC.....................................................28
2.9.4 Регістри PORTD і TRISD....................................................29
2.9.5 Регістри PORTE і TRISE.....................................................30
2.10 Таймери.....................................................................................30
2.10.1 Модуль таймера TMR0..................................................................31
2.10.2 Модуль таймера TMR1..................................................................32
2.10.3 Модуль таймера TMR2..................................................................35
2.11 Модуль 10-розрядного АЦП........................................................37
2.12 Переривання................................................................................40
2.13 Сторожовий таймер WDT…....................................................42
2.14 Біти конфігурації.......................................................................43 2.15 Система команд.....................................................................................44
3 Програмування РІС – мікроконтролерів.............................................47
3.1 Правила запису програм на мові Асемблера.............................47
3.2 Структура робочої програми.......................................................50
3.3 Приклад написання початкового тексту програми...................50
3.4 Перетворення початкового тексту робочої програми
у об'єктний модуль.......................................................................54
3.5 Використання програми-транслятора MPASM…....................55
3.6 Відладка робочих програм.........................................................57 4 MPLAB IDE..............................................................................................................58
4.1 Засоби розробки MPLAB IDE…........................................................59 Створення нового проекту..................................................................60
4.3 Створення початкового файлу............................................................60
4.4 Компіляція початкового файлу............................................................62
4.5 Відладка програми................................................................................64
4.6 Внутрішньосхемний відладчик MPLAB ICD2..................................67
4.7 Демонстраційно – відладочна плата PICDEM 2 Plus........................68
4.8 Програмування контролера.................................................................69 5 Лабораторний практикум.............................................................................70
Лабораторна робота 1............................................................................70
Лабораторна робота 2............................................................................72
Лабораторна робота 3............................................................................74
Лабораторна робота 4............................................................................77
Лабораторна робота 5............................................................................79
Лабораторна робота 6............................................................................83
Література......................................................................................................89
Додаток А.......................................................................................................90
Додаток Б.......................................................................................................92
Додаток В.......................................................................................................95
Додаток Г.......................................................................................................96
ВСТУП
Однокристальні мікроконтролери (ОМК) дозволяють істотно розширити інтелектуальні можливості різного роду пристроїв і систем. Вони є по суті спеціалізованими однокристальними МІКРОЕОМ, що містять для зв'язку із зовнішнім середовищем вбудовані периферійні вузли і пристрої, набір яких багато в чому визначає їх функціональні можливості і області застосування. Останнє спричинило за собою появу величезної різноманітності типів ОМК, які випускаються в даний час такими фірмами як, Intel, Motorola, Zilog, National, Mitsubishi Electric і ряд інших.
Однокристальні мікроконтролери стали сьогодні одним з найпоширеніших елементів "програмованої логіки". Більше двох третин світового ринку мікропроцесорних засобів в даний час складають саме однокристальні мікроконтролери.
Переважне число ОМК мають традиційну (Фон-Неймановську або Прінстонську) архітектуру, в якої команди і дані передаються по одній шині. Особливий клас є мікроконтролери, архітектура яких заснована на концепції роздільних шин і областей пам'яті для даних і команд (Гарвардська архітектура). Дані мікроконтролери мають RISC-архітектуру, забезпечуючу просту але могутню систему команд, які виконуються за один цикл. До таких мікроконтролерів відносяться, зокрема, ОМК фірми Microchip сімейства PIC (12CXX, 16CXX, 17CXX).
У структуру ОМК сімейства PIC закладено багато різних функціональних особливостей, що роблять їх на сьогоднішній день самими високопродуктивними, мікроспоживаючими, перешкодозахисними, програмованими користувачем 8-ми бітовими мікроконтролерами. Завдяки цим особливостям ОМК сімейства PIC можуть обробляти апаратнопрограмним способом як дискретні, так і аналогові сигнали, формувати різного роду керуючі сигнали, а також здійснювати зв'язок між собою і з ЕОМ, що знаходиться на вищому ієрархічному рівні в системі.
Фірмою Microchip також здійснюється могутня програмна, апаратна і інформаційна підтримка своїх виробів через мережу Internet і широко розгалужену у всьому світі ділерську мережу.
Друга частина лабораторного практикуму з дисципліни ―Мікропроцесорні пристрої‖ призначена для закріплення теоретичних знань та придбання практичних навичок програмування РІС- мікроконтролерів.
1 КОРОТКИЙ ОПИС ОДНОКРИСТАЛЬНИХ МІКРОКОНТРОЛЕРІВ РІС
1.1 Загальні відомості
У залежності від розрядності команд, архітектурних особливостей і функціональних можливостей однокристальні мікроконтролери (ОМК) PIC поділяються на три основні групи (підсімейства):
1 Молодше підсімейство (12-розрядне процесорне ядро)-PIC 12C5хх, PIC 12C6хх, PIC 16C5хх.
2 Середнє підсімейство (14-розрядне процесорне ядро)- PIC 16C55х, PIC 16C6хх, PIC 16C7хх, PIC 16F8хх, PIC 16C9хх.
3 Старше підсімейство (16-розрядне процесорне ядро)- PIC 17Схх, PIC 18Схх, PIC 18Fхх.
Більшість ОМК, також як і мікроконтролери серії КР1816, має традиційну (Фон-Неймановську чи Прінстонську) архітектуру в якій команди і дані передаються по одній шині. Архітектура ж ОМК PIC заснована на концепції роздільних шин і областей пам'яті для даних і команд (Гарвардська архітектура) . Шина і пам'ять даних (ОЗП) має ширину 8 біт, а програмна шина і пам'ять (ПЗУ чи ППЗУ) має ширину 12, 14 чи 16 біт у залежності від сімейства ОМК. Така концепція забезпечує просту, але могутню систему команд, а двоступінчастий конвеєр забезпечує їхню одночасну вибірку і виконання. Усі команди складаються з одного слова (шириною 12, 14 чи 16 біт) і виповнюються за один цикл (200 нс при тактовій частоті 20Мгц), крім команд переходу, що виконуються за два цикли. За рахунок цього ОМК із RISC-архітектурою типу PIC 16/17/18 мають саму високу швидкодію в порівнянні з більшістю найбільш розповсюджених 8-бітових мікроконтролерів аналогічного класу і забезпечують більш ніж у 5-10 разів кращу продуктивність.
Контрольні іспити показують, що застосування ОМК серії PIC дозволяють зменшити час налагодження в 1,5-2 рази в порівнянні зі звичайними 8- розрядними мікроконтролерами.
Система команд PIC 12/16/17/18 включає тільки 33/37/57/75 команд і може бути легко і швидко вивчена. У конструкцію PIC включено багато енергозберігаючих особливостей, що роблять їх на сьогоднішній день самими мікроспоживаючими (у режимі SLEEP споживаний струм менш 1 мка), самими низьковольтними по напрузі живлення (2В) програмувальними користувачем мікроконтролерами.
Найпростіші типи таких ОМК містять 8-бітний таймер-лічильник з 8бітним програмованим попереднім дільником (фактично 16-бітний таймер) і 6(20) ліній двохнаправленого вводу/виводу. Корпус таких ОМК має 8(18) виводів. Мікроконтролери середнього і старшого підсімейств містять крім цього цілий ряд додаткових функціональних вузлів і блоків таких, наприклад, як: багатоканальні аналого-цифрові перетворювачі, розгалужену систему переривань, блоки керування рідкокристалевими індикаторами, компаратори, широтно-імпульсні модулятори, паралельні і послідовні інтерфейси типу I2C, RS-232 і т.п., цифрові перемножувачі, додаткові таймери-лічильники, збільшена кількість портів вводу/виводу дискретних сигналів та інше.
Таким чином, PIC 16/17/18 мають істотні переваги в порівнянні з іншими типами мікроконтролерів такого ж класу.
В даний час випускаються мікроконтролери з різним обсягом постійної й оперативної пам'яті, з різними типами тактових генераторів, з різною швидкодією і конструктивним виконанням, а також з різними функціональними можливостями. Конкретний тип мікроконтролера для рішення визначеної задачі можна вибрати використовуючи інформацію приведену в [1].
У залежності від технології виготовлення ПЗУ всі типи МК розділяються на п'ять груп:
1 Мікроконтролери, багаторазово програмовані користувачем, що, у свою чергу можуть бути розділені також на дві наступні групи:
1) Мікроконтролери з ультрафіолетовим витиранням. Ці МК оптимальні для експериментальних розробок і налагодження програм.
2) Мікроконтролери з багаторазово електрично програмованим користувачем ППЗУ (EEPROM) програм і даних. Ці МК дозволяють легко підбудовувати програму і дані під конкретні вимоги навіть після завершення асемблирування і тестування. Ця можливість може бути використана як для тиражування, так і для занесення каліброваних даних уже після остаточного тестування розробленого МКП.
Однак, дані МК мають обмежена кількість циклів перепрограмування.
2 Однократно програмовані мікроконтролери (ОТР).
Ці МК можуть бути однократно запрограмовані користувачем і застосовуються в тих випадках, коли немає необхідності часто змінювати зміст програми чи конфігурацію мікроконтролера в розробленому МКП.
3 Мікроконтролери, програмовані виготовлювачем (QTP). Ці МК є замовленими і цілком програмованими на заводі-виготовлювачі по заздалегідь наданої користувачемем інформації.
4 Мікроконтролери, послідовно програмовані виготовлювачем (SQTP). Це так само замовлені однократно програмовані на заводівиготовлювачі МК типу QTP, у яких декілька комірок, що задаються користувачем, у кожнім мікроконтролері програмуються різними серійними номерами.
5 Масочні мікроконтролери (ROM).
Ці МК також є замовленими і забезпечують максимально низьку вартість при крупносерійних замовленнях (наприклад, такими МК є PIC16CR54, PIC16CR56, PIC16CR57, PIC16CR58 і т.п.).
Для мікроконтролерних пристроїв (МКП) чи систем (МКС), програма яких може змінюватися, або містить які-небудь перемінні частини (таблиці, параметри калібрування, ключі і т.п.), випускаються мікроконтролери типу PIC 16F874(16F84) з багаторазово електрично перепрограмованою пам'яттю програм і даних – констант. Саме цей МК буде в основному використаний у прикладах, що будуть розглянуті далі. Це дозволить (при бажанні чи необхідності) перевірити роботу написаної і налагодженої програми за допомогою спеціальної макетної плати (універсальної – PICDEM-1, PICDEM-2, PICDEM-2plus чи саморобної – створеної самим користувачем).
1.3 Особливості структурної організації
Розглянемо особливості структурної організації, що виділяють PIC мікроконтролери серед інших ОМК такого ж класу, а також основні відмінності різних сімейств PIC друг від друга.
Для застосувань, пов'язаних із захистом інформації, кожен PIC має біт секретності, який може бути запрограмований для заборони прочитування програмного коду і ПЗП даних. При програмуванні спочатку записується програмний код, перевіряється на правильність запису, а потім встановлюється біт секретності. Якщо спробувати прочитати мікросхему зі встановленим бітом секретності, то для PIC16C5X старші 8 розрядів коду прочитуватимуться як 0, а молодші 4 розряди будуть скремблировані 12 розрядів команди. Для PIC16C84 аналогічні 7 старших розрядів прочитуватимуться нулями, а 7 молодших розрядів представлятимуть скремблировані 14 розрядів команди. Електрично перепрограмоване ПЗП даних PIC16C84 при установці біта захисту не може бути прочитане.
Мікроконтролери сімейства PIC мають дуже ефективну систему команд. Всі інструкції виконуються за один цикл, за винятком умовних переходів і команд, що змінюють програмний лічильник, які виконуються за 2 цикли. Один цикл виконання інструкції складається з 4 періодів тактової частоти. Таким чином, при частоті 4 Мгц, час виконання інструкції складає 1 мікросекунду. Кожна інструкція складається з 14 бітів, що діляться на код операції і операнд (можлива маніпуляція з регістрами, елементами пам'яті і безпосередніми даними). Висока швидкість виконання команд в PIC досягається за рахунок використання двохшинної Гарвардської архітектури замість традиційної одношинною ФонHеймановської. Гарвардська архітектура грунтується на наборі регістрів з розділеними шинами і адресним простором для команд і для даних. Hабіp регістрів визначає, що всі програмні об'єкти, такі як порти введення/виводу, елементи пам'яті і таймери, є фізично pеализовані апаратні регістри. Пам'ять даних (ОЗП) для PIC16CXX має розрядність 8 бітів, пам'ять програм (ППЗП) має розрядність 12 бітів для PIC16C5X і 14 бітів для PIC16ХXX. Використання Гарвардської архітектури дозволяє досягти високої швидкості виконання бітових, байтових і регістрових операцій. Крім того, Гаpвадська архітектура допускає конвейєрне виконання інструкцій, коли одночасно виконується поточна інструкція і прочитується наступна. У традиційній же Фон-Hеймановській архітектурі команди і дані передаються через одну шину, що розділяється або мультиплексується, тим самим обмежуючи можливості конвейєризації. Писати програми для PIC не складніше, ніж для будь-якого іншого процесора. Логіка, і лише логіка... Звичайно, Гарвардська архітектура і велика розрядність команди дозволяють зробити код для PIC значно компактнішим, ніж для інших мікроконтролерів і істотно підвищити швидкість виконання програм.
1.2.1 Набір регістрів
Всі програмні об'єкти, з якими може працювати PIC, є фізичні регістри. Щоб зрозуміти, як працює PIC, потрібно розібратися з тим, які регістри у нього існують і як з кожним з них працювати.
РЕГІСТР НЕПРЯМОЇ АДРЕСАЦІЇ . Регістр непрямої адресації фізично не існує. Він використовується для непрямої вибірки одного з 64 можливих регістрів.
РЕГІСТР ТАЙМЕРА/ЛІЧИЛЬНИКА TMRХ. Регістр
таймера/лічильника TMRХ може бути записаний і прочитаний як і будьякий інший регістр. TMRХ може збільшуватися по зовнішньому сигналу, що подається на виведення RTCC, або по внутрішній частоті, відповідній частоті команд. Основне застосування таймера/лічильника - підрахунок числа зовнішніх подій і вимірювання часу. Сигнал від зовнішнього або внутрішнього джерела також може бути заздалегідь поділений за допомогою вбудованого в PIC програмованого дільника.
ПРОГРАМНИЙ ЛІЧИЛЬНИК PCL. Програмний лічильник (РС) використовується для генерації послідовності адрес комірок ПЗП програми, що містять 14-pозpядні команди. РС має розрядність 13 бітів, що дозволяє прямо адресувати 8Кх14 комірок ПЗП.
РЕГІСТР СЛОВА СТАНУ STATUS. Регістр слова стану схожий на регістр PSW, що існує в більшості мікропроцесорів. У нім знаходяться біти перенесення, десяткового перенесення і нуля, а також біти режиму включення і біти сторінкової адресації.
РЕГІСТР ВИБОРУ FSR. Регістр вибору FSR використовується разом з регістром непрямої адресації для непрямої вибірки одного з 64 можливих регістрів. Фізично задіяно 36 регістрів ОЗП користувача, розташованих по адресах 0Ch-2Fh і 15 службових регістрів, розташованих по різних адресах.
РЕГІСТРИ ВВЕДЕННЯ/ВИВОДУ PORTХ Регістри можуть бути
індивідуально запрограмовані як входи або виходи за допомогою регістра TRISХ. Завдання 1 в розряді регістра TRIS програмує відповідний розряд порту як вхід. При читанні порту прочитується безпосередній стан виводу, при записі в порт запис відбувається в буферний регістр.
РЕГІСТРИ ЭППЗУ EEDATA, EEADR. PIC16ХХХ має вбудоване електрично перепрограмувальне ПЗП, яке може бути прочитане і записане за допомогою регістра даних EEDATA і регістра адреси EEADR. Запис нового байта триває близько 10 мсек і управляється вбудованим таймером. Управління записом і прочитуванням здійснюється через регістр EECON1. Для додаткового контролю за записом служить регістр EECON2.
РЕГІСТРИ ЗАГАЛЬНОГО ПРИЗНАЧЕННЯ. Регістри загального призначення є статичним ОЗП.
СПЕЦІАЛЬНІ РЕГІСТРИ W, INTCON, OPTION. На завершення розглянемо спеціальні регістри PIC. До них відносяться робочий регістр W, використовуваний в більшості команд як регістр акумулятора і регістри INTCON і OPTION. Регістр переривань INTCON (адреса 0Bh) служить для управління режимами переривання і містить біти дозволу переривань від різних джерел і прапори переривань. Регістр режимів OPTION (адреса 81h) служить для завдання джерел сигналу для попереднього дільника і таймера/лічильника, а також для завдання коефіцієнта ділення попереднього дільника, активного фронту сигналу для RTCC і входу переривання. Крім того за допомогою регістра OPTION можуть бути включені резистори навантажень для розрядів порту B, запрограмованих як входи.
1.2.2 Сторожовий таймер WDT
Сторожовий таймер WDT призначений для запобігання катастрофічним наслідкам від випадкових збоїв програми. Він також може бути використаний в додатках, пов'язаних з відліком часу, наприклад, в детекторі пропущених імпульсів. Ідея використання сторожового таймера полягає в регулярному його скиданні під управлінням програми або зовнішньої дії до того, як закінчиться його витримка часу і не відбудеться скидання процесора. Якщо програма працює нормально, то команда скидання сторожового таймера CLRWDT повинна регулярно виконуватися, оберігаючи процесор від скидання. Якщо ж мікропроцесор випадково вийшов за межі програми (наприклад, від сильної перешкоди по ланцюгу живлення) або зациклився на якій-небудь ділянці програми, команда скидання сторожового таймера швидше за все не буде виконана протягом достатнього часу, і відбудеться повне скидання процесора, що ініціалізує всі регістри і приводить систему в робочий стан. Сторожовий таймер не вимагає яких-небудь зовнішніх компонентів і працює на вбудованому генераторі RC, причому генерація не припиняється навіть у разі відсутності тактової частоти процесора. Типовий період сторожового таймера 18 мсек. Можна підключити попереднього дільника на сторожовий таймер і збільшити його період аж до 2 сек. Ще однією функцією сторожового таймера служить включення процесора з режиму зниженого енергоспоживання, в який процесор переводиться командою SLEEP. У цьому режимі PIC споживає дуже малий струм - близько 1 мкА. Перейти з цього режиму в робочий режим можна або по зовнішній події натиснення кнопки, спрацьовуванню датчика, або по сторожовому таймеру.
1.2.3 Тактовий генератор
Для мікроконтролерів сімейства PIC можливе використання чотирьох типів тактового генератора: XT кварцовий резонатор, HS високочастотний кварцовий резонатор, LP мікроспоживаючий кварцовий резонатор і RC ланцюжок. Завдання типу використовуваного тактового генератора здійснюється в процесі програмування мікросхеми. У разі завдання варіантів XT, HS і LP до мікросхеми підключається кварцовий або керамічний резонатор або зовнішнє джерело тактової частоти, а у разі завдання варіанту RC - резистор і конденсатор. Звичайно, керамічний і, особливо, кварцовий резонатор значно точніший і стабільніший, але якщо висока точність відліку часу не потрібна, використання RC генератора може зменшити вартість і габарити пристрою.
1.2.4 Схема скидання
Мікроконтролери сімейства PIC використовують внутрішню схему скидання по включенню живлення у поєднанні з таймером запуску генератора, що дозволяє в більшості ситуацій обійтися без традиційного резистора і конденсатора. Досить просто підключити вхід MCLR до джерела живлення. Якщо при включенні живлення можливі імпульсні перешкоди або викиди, то краще використовувати послідовний резистор 100-300 Ом. Якщо живлення наростає дуже поволі (повільніше, ніж за 70 мсек), або Ви працюєте на дуже низьких тактових частотах, то необхідно використовувати традиційну схему скидання з резистора і конденсатора.
2 МІКРОКОНТРОЛЕР PIC16F877
2.1 Характеристика мікроконтролера
• Високошвидкісна архітектура RISC.
• 35 інструкцій.
• Всі команди виконуються за один цикл, окрім інструкцій переходів, що виконуються за два цикли.
• Тактова частота:
DC - 20МГц, тактовий сигнал DC - 200нс, один машинний цикл.
• 8к х 14 слів FLASH пам'яті програм. • 368 байтів пам'яті даних (ОЗП).
• 256 EEPROM пам'яті даних.
• Сумісність по виводах з PIC16C73B/74B/76/77
• Система переривань (до 14 джерел).
• 8-рівневий апаратний стек.
• Прямій, непрямий і відносний режими адресації.
• Скидання по включенню живлення (POR).
• Таймер скидання (PWRT) і таймер очікування запуску генератора (OST) після включення живлення.
• Сторожовий таймер WDT з власним генератором RC. • Програмований захист пам'яті програм.
• Режим енергозбереження SLEEP.
• 8 каналів 10-розрядного АЦП.
• Вибір параметрів тактового генератора.
• Високошвидкісна, енергозберігаюча CMOS FLASH/EEPROM технологія.
• Повністю статична архітектура.
• Програмування в готовому пристрої (використовується два виведення мікроконтролера).
• Низьковольтний режим програмування.
• Режим внутрішньосхемної відладки (використовується два виведення мікроконтролера).
• Широкий діапазон напруги живлення від 2.0В до 5.5В.
• Підвищена здатність навантаження портів введення/виводу (25мА).
• Мале енергоспоживання: < 0.6 мА при 3.0В, 4.0МГц; 20мкА при 3.0В,
32кГц ; < 1 мкА в режимі енергозбереження.
2.2 Cтруктурна схема мікроконтролера PIC16F877
Cтруктурна схема мікроконтролера PIC16F877 приведена на рисунку
2.1.
З розгляду даної структурної схеми видно, що фізичні і логічні компоненти, з яких складається PIC 16FXX аналогічні будь-якому іншому мікроконтролеру. Тому писати програми для PIC не складніше, ніж для будь-якого іншого процесора. Звичайно, Гарвардська архітектура і велика розрядність команди дозволяє зробити код для PIC значно більш компактним, чим для інших мікроконтролерів і істотно підвищити швидкість виконання програми.
Основу структури даного мікроконтролера складають дві внутрішні шини: двонаправлена 8-бітова шина даних і 14-бітова шина команд. Це відповідає, як вже згадувалося раніше, Гарвардській архітектурі, заснованій на концепції роздільних шин і областей пам'яті для даних і команд. Шина даних зв'язує між собою всі основні функціональні блоки МК: пам'ять даних (RAM); арифметико-логічний пристрій (ALU); порти
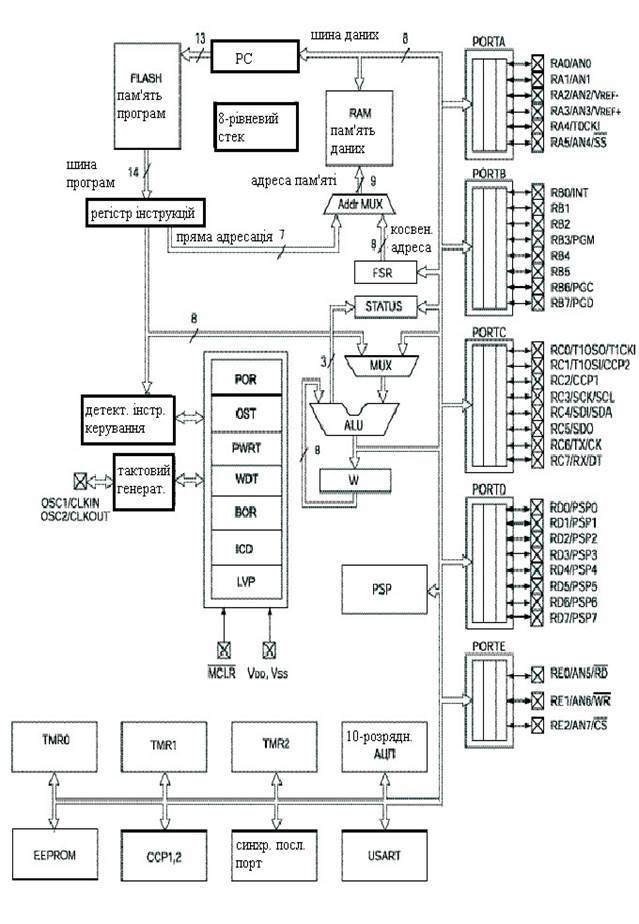
Рисунок 2.1 – Структура мікроконтролера PIC16F877 введення/виводу (PORT A,B,C,D,E); регістри стану (STATUS), непрямої адресації (FSR), таймерів-лічильників (TMR 0,1,2), програмного лічильника (PC).
У мікроконтролерах сімейства РІС існують пряма і непряма адресація всіх регістрів і елементів пам'яті. Всі спеціальні регістри і лічильник команд також відображаються на пам'ять даних.
Мікроконтролери РІС16FXХ мають ортогональну (симетричну) систему команд, що дозволяє виконувати будь-яку операцію з будь-яким регістром, використовуючи будь-який метод адресації. Це полегшує програмування для них і значно зменшує час, необхідний на навчання роботі з ними.
Арифметико-логічний пристрій (ALU) 8-розрядний і виконує складання, віднімання, зрушення, бітові і логічні операції. У командах, що мають два операнди, одним з операндів є робочий регістр W. Другий операнд може бути константою або вмістом будь-якого регістра ОЗП. У командах з одним операндом, операнд може бути вмістом робочого регістра або вмістом будь-якого регістр. Для виконання всіх операцій ALU використовує робочий регістр W, який не може бути прямо адресований. Залежно від результату виконання операції, можуть змінитися значення бітів перенесення С, десяткового перенесення DC і нуля Z в регістрі стану STATUS. При відніманні биті С і DC працюють як біти позики і десяткової позики, відповідно.
Вхідна тактова частота, що поступає з виведення OSC1/CLKIN, усередині ділиться на чотири і з неї формуються чотири циклічні тактові послідовності що не перекриваються Q1, Q2, Q3 і Q4.
Вибірка команди і її виконання суміщені за часом таким чином, що вибірка команди займає один цикл, а виконання наступний цикл. Ефективний час виконання команди складає один цикл. Якщо команда змінює лічильник команд (наприклад, команда GOTO), то для виконання цієї команди буде потрібно два цикли. Цикл вибірки починається із збільшення лічильника команд в такті Q1. У циклі виконання команди вибрана команда защипується в регістр команд в такті Q1. Протягом тактів Q2, Q3 і Q4 відбувається декодування і виконання команди. У такті Q3 прочитується пам'ять даних (читання операнда), а запис відбувається в такті Q4. Таким чином, цикл виконання команди складається з 4-х тактів Q1-Q4, в кожному з яких проводяться різні, заздалегідь визначені дії:
Q1 - Вибірка певної команди з пам'яті програм і її декодування або вимушений NOP.
Q2 - Вибірка даних або NOP.
Q3 - Виконання команди і обробка даних. Q4 - Запис даних або NOP. Характеристика периферійних модулів:
Таймер 0: 8-розрядний таймер/лічильник з 8-розрядним програмованим перед дільником.
• Таймер 1: 16-розрядний таймер/лічильник з можливістю підключення зовнішнього резонатора.
• Таймер 2: 8-розрядний таймер/лічильник з 8-розрядним програмованим переддільником і вихідним дільником.
• Два модулі порівняння/захват/ШІМ (РСР):
16-розрядне захоплення (максимальна роздільна здатність 12.5нс); 16-розрядне порівняння (максимальна роздільна здатність 200нс); 10-розрядний ШІМ.
• Багатоканальний 10-розрядний АЦП.
• Послідовний синхронний порт MSSP; ведучий/ведомий режим SPI; ведучий/ведомий режим I2C.
• Послідовний синхронно-асинхронний приймач USART з підтримкою детектування адреси.
• Ведений 8-розрядний паралельний порт PSP з підтримкою зовнішніх сигналів
-RD.-WR, -CS.
![]() Детектор зниженої напруги (BOD) для скидання по зниженню напруги живлення (BOR).
Детектор зниженої напруги (BOD) для скидання по зниженню напруги живлення (BOR).
2.3 Організація пам'яті
У мікроконтролерах PIC16F87X існує два види пам'яті. Пам'ять програм і пам'ять даних мають роздільні шини даних і адреси, що дозволяє виконувати паралельний доступ.
2.3.1 Пам’ять програм
Мікроконтролери PIC16F87X мають 13-розрядний лічильник команд PC, здатний адресувати 8К х 14 слів пам'яті програм. Фізично реалізовано FLASH пам'яті програм 8К х 14 у PIC16F877. Адреса вектора скидання – 0000h. Адреса вектора переривань – 0004h.
Пам'ять програм (ППЗП) має сторінкову організацію (рисунок 2.2). Об'єм однієї сторінки 2048 14-ти розрядних слів . Мікроконтролер PIC 16F877 має чотири сторінки пам'яті програм для зберігання 14-ти розрядних кодів команд.
Всі мікроконтролери PIC16F87X здатні адресувати 8К слів пам'яті програм. Інструкції переходів (CALL і GOTO) мають 11 -разрядное поле
для вказівки адреси, що дозволяє безпосередньо адресувати 2Кслів пам'яті програм. Для адресації верхніх сторінок пам'яті програм використовуються 2 бита в регістрі PCLATH<4:3>. Перед виконанням команди переходу (CALL або GOTO) необхідно запрограмувати біти регістра PCLATH<4:3> для адресації необхідної сторінки.
При виконанні інструкцій повернення з підпрограми, 13-розрядне значення для лічильника програм РС береться з вершины стека, тому маніпуляція бітами регістра PCLATH<3:4> не потрібна.
 0004h
0004h
Внутрішня пам‘ять програм
Рисунок 2.2 – Структура пам’яті програм
2.3.2 Організація пам'яті даних
Пам'ять даних розділена на чотири банки, які містять регістри загального і спеціального (SFR) призначення. Биті RP1 (STATUS<6>) і RP0 (STATUS<5>) призначені для управління банками даних. У таблиці 2.1 показаний стан бітів, що управляють, при зверненні до банків пам'яті даних. Карта пам'яті даних показана на рисунку 2.3.
Таблиця 2.1 – Адресація банків даних
| RP1:RPO |
Банк |
| 00 |
0 |
| 01 |
1 |
| 10 |
2 |
| 11 |
3 |
Об'єм банків пам'яті даних до 128 байтів (7Fh). На початку банку розміщуються регістри спеціального призначення, потім регістри загального призначення виконані як статичний ОЗП. Всі реалізовані банки містять регістри спеціального призначення. Деякі, часто використовувані регістри спеціального призначення можуть відображатися і в інших банках пам'яті.
Регістри можуть бути адресовані прямо або побічно, з використанням регістра непрямої адресації FSR. Безпосередня адресація підтримується спеціальними командами, що завантажують дані з пам'яті програми в робочий регістр W.
Регістри спеціального призначення використовуються для керування функціями мікроконтролера і можуть бути розділені на два набори: регістри базових функцій і регістри периферійних пристроїв. Регістри базових функцій містять у собі регістр-перемикач непряму адресації (INDF), програмний лічильник (РС), представлений двома регістрами PCL і PCLATH, регістр слова стану (STATUS), регістр-покажчик непряму адресації (FSR), робочий регістр (W), регістр переривань (INTCON), а також регістр режимів роботи чи конфігурації попереднього дільника і таймера (OPTION). Регістри периферійних пристроїв містять у собі регістри (RA,RB,RC,RD,RE-порти А,B,C,D,E), регістри даних (EEDATA) і адреси (EEADR) пам'яті даних-констант, регістри таймерів-лічильників (TMR0,1,2) і регістри керування конфігурацією портів вводу/виводу (TRISA, TRISB, TRISC, TRISD, TRISE).
Регістри загального призначення використовуються для зберігання даних по розсуду користувача.
Таблиця спеціальних регістрів приведена в додатку А.
Для виконання непрямої адресації необхідно звернутися до фізично не реалізованого регістра INDF. Звернення до регістра INDF фактично викличе дію з регістром, адреса якого вказана в FSR. Непряме читання регістра INDF (FSR=0) дасть результат 00h. Непрямий запис в регістр INDF не викличе ніяких дій (викликає дії на прапори АЛП в регістрі STATUS). 9-й біт непрямої адреси IRP зберігається в регістрі STATUS<7>. Приклад 9-розрядної непрямої адресації показаний на рисунку 2.4.
Адреса Адреса Адреса Адреса
Регістр * Регістр * Регістр * Регістр * непрямої 00h непрямої 80h непрямої 100h непрямої адресації адресації адресації адресації 180h
TMR0 01h OPTION 81h TMR0 101h OPTION REG 181h PCL 02 h REGPCL 82 h PCL 102 h PCL 182h
STATUS 03 h STATUS 83 h STATUS 103 h STATUS 183h
FSR 04h FSR 84h FSR 104h FSR 184h
PORTA 05h TRISA 85h 105h х 185h
PORTB 06h TRISB 86h PORTB 106h TRISB 186h
PORTC 07h TRISC 87h х 107h х 187h
PORTD(1) 08 h TRISD(1) 88 h х 108 h х 188h PORTEP) 09h TRISEP) 89h х 109h х 189h PCLATH 0Ah PCLATH 8Ah PCLATH 10Ah PCLATH 18Ah
INTCON 0Bh INTCON 8Bh INTCON 10Bh INTCON
PIR1 0Ch PIE1 8Ch EEDATA 10Ch EECON1 18Bh PIR2 0Dh PIE2 8Dh EEADR 10Dh EECON2 18Ch TMR1L 0Eh PCON 8Eh EEDATH 10Eh Резерв^' 18Dh TMR1H 0Fh x 8Fh EEADRH 10Fh Резерв^' 18Eh
T1CON 10h x 90h 110h 18Fh
TMR2 11h SSPCON2 91h Регістри Регістри
T2CON 12 h PR2 92 h
SSPBUF 13h SSPADD 93h
SSPCON 14h SSPSTAT 94h загального загального
CCPR1L 15h x 95h
CCPR1 H 16 h x 96 h призна - призна-
CCP1CON 17 h x 97 h ченнях чення
RCSTA 18h TXSTA 98h
TXREG 19h SPBRG 99h
RCREG 1Ah x 9Ah
CCPR2L 1Bh x 9Bh 16 байтів 16 байтів
CCPR2H 1Ch x 9Ch
CCP2CON 1Dh x 9Dh
ADRESH 1Eh ADRESL 9Eh
ADCONO 1Fh ADCON1 9Fh 11Fh 19Fh 20h Регістри A0h Регістри 120h Регістри
 Регістри загаль- загаль- загаль- 1A0h загаль- ного ного ного ного призна- призна- призна -
Регістри загаль- загаль- загаль- 1A0h загаль- ного ного ного ного призна- призна- призна -
призна- чення чення чення
чення 80 байтів EFh 80 байт ів 16170Fhh 80 байт ів 1EFh
96 байтів Доступ до F0h Доступ до Доступ до 1F0h
7Fh 70h- 7Fh FFh 70h- 7Fh 17Fh 70h- 7Fh
1FFh
Банк 0 Банк 1 Банк 2 БанкЗ
*- не фізичний регистр х - не реалізовані, значення при читанні 00h
Рисунок 2.3 - Карта пам'яті даних мікроконтролерів PIC16F876/877
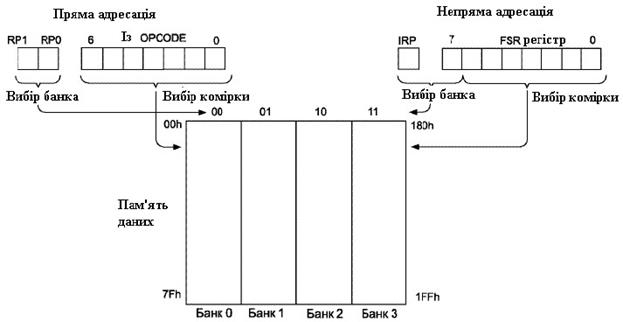
Рисунок 2.4 - Приклад 9-розрядної непрямої адресації
2.4 Регістр стану STATUS
Регістр стану (адреса 03h, 83h, 103h або 183h) містить арифметичні прапори АЛП, біти стану контролера при скиданні і біти вибору сторінок пам‘яті. Регістр STATUS доступний для будь-якої команди так само, як будь-який інший регістр. Проте, биті TO і PD встановлюються апаратно і не можуть бути записані в регістр статусу програмно. Це слід мати на увазі при виконанні команди з використанням регістра статусу. Наприклад, команда CLRF обнулить всі біти, окрім бітів TO і PD, а потім встановить біт Z=1. Після виконання цієї команди регістр статусу може і не мати нульового значення (із-за бітів TO і PD) 000??100. Тому рекомендується для зміни регістра статусу використовувати тільки команди бітової установки BCF, BSF, MOVWF, які не змінюють решту біт статусу. Розміщення прапорів в регістрі STATUS наступне:
b7 b6 b5 b4 b3 b2 b1 b0
| IRP |
RP1 |
RP0 |
-TO |
- PD |
Z |
DC |
C |
Біт 7: IRP: Біт вибору банку при непрямій адресації
1- банк 2, 3(100h-1FFh)
0 - банк 0, 1 (000h - 0FFh)
Біти 6-5: RP1:RPO: Біти вибору банку при безпосередній адресації
11 – банк 3 (180h-1FFh)
10 – банк 2 (100h-17Fh)
01 - банк 1 (080h - 0FFh)
00 - банк 0 (000h - 07Fh)
Біт 4: -ТО: Прапор переповнювання сторожового таймера
1 - після POR або виконань команд CLRWDT, SLEEP
0 - після переповнювання WDT
Біт 3: -PD: Прапор включення живлення
1 - після POR або виконань команди CLRWDT
0 - після виконання команди SLEEP
Біт 2: Z: Прапор нульового результату
1 - нульовий результат виконання арифметичної або логічної операції
0 - не нульовий результат виконання арифметичної або логічної операції
Біт 1: DC: Прапор десяткового перенесення/позики (для команд ADDWF, ADDWL, SUBWF, SUBWL), позика має інверсне значення
1 - було перенесення з молодшого півбайта
0 - не було перенесення з молодшого півбайта
Біт 0: С: Прапор перенесення/позики (для команд ADDWF,
ADDWL, SUBWF, SUBWL), позика має інверсне значення
1 - було перенесення із старшого біта
0 - не було перенесення із старшого біта
Примітка. Прапор позики має інверсне значення. Віднімання виконується шляхом збільшення додаткового коду другого операнда. При виконанні команд зрушення (RRF, RLF) біт С завантажується старшим або молодшим бітом зрушуваного регістра.
2.5 Регістр OPTION
Регістр OPTION доступний для читання і запису, містить біти управління:
• Попереднім дільником TMR0/WDT;
• Активним фронтом зовнішнього переривання RB0/INT; • Підтягаючими резисторами на входах PORTB.
Примітка. Якщо попередній дільник включений перед WDT, то коефіцієнт ділення тактового сигналу для TMR0 рівний 1:1.
Розміщення бітів керування в регістрі OPTION наступне:
b7 b6 b5 b4 b3 b2 b1 b0
| -RBPU |
|INTEDG |
TOCS |
| TOSE |
PSA |
PS2 |
PS1 |
PS0 |
біт 7: -RBPU: Включення підтягаючих резисторів на входах PORTB:
1 = підтягаючі резистори відключені, 0 = підтягаючі резистори включені;
біт 6: INTEDG: Вибір активного фронту сигналу на вході зовнішнього переривання: INT 1 = переривання по передньому фронту сигналу,
0 = переривання по задньому фронту сигналу;
біт 5:TOCS: Вибір тактового сигналу для TMR0: 1 = зовнішній тактовий сигнал з виведення RA4/TOCKI, 0 = внутрішній тактовий сигнал CLKOUT;
біт 4: TOSE: Вибір фронту приросту TMR0 при зовнішньому тактовому сигналі: 1 = приріст по задньому фронту сигналу (з високого до низького рівня) на виведенні RA4/TOCKI, 0 = приріст по передньому фронту сигналу (з низького до високого рівня) на виведенні RA4/TOCKI;
біт 3: PSA: Вибір включення переддільника: 1 = переддільник включений перед WDT, 0 = переддільник включений перед TMR0; біти 2-0: PS2 – PS0: Установка коефіцієнта ділення переддільника, коефіцієнти ділення приведені в таблиці 2.2.
Таблиця 2.2 - Коефіцієнти ділення переддільника
| Значення PS2 – PS0 |
Для TMR0 |
Для WDT |
| 000 |
1 :2 |
1:1 |
| 001 |
1 :4 |
1:2 |
| 010 |
1:8 |
1:4 |
| 011 |
1:16 |
1:8 |
| 100 |
1:32 |
1:16 |
| 101 |
1:64 |
1:32 |
| 110 |
1:128 |
1:64 |
| 111 |
1 :256 |
1:128 |
Примітка. При використанні режиму низьковольтного програмування і включених підтягаючих резисторах на PORTB необхідно скинути в '0' 3-й біт регістра TRISB для виключення підтягаючого резистора на виведенні RB3.
2.6 Регістр INTCON
Регістр INTCON доступний для читання і запису, містить біти дозволів і прапори переривань: переповнювання TMR0; зміни рівня сигналу на виводах PORTB; зовнішнє джерело переривань RBO/INT. Розміщення бітів в регістрі INTCON наступне:
b7 b6 b5 b4 b3 b2 b1 b0
| GIE |
|PEIE |
TOIE |
INTE |
RBI |
TOIF |
INTF |
RBIF |
біт 7: GIE: Глобальний дозвіл переривань:
1 = дозволені всі немасковані переривання, 0 = всі переривання заборонені; біт 6: PEIE: Дозвіл переривань від периферійних модулів:
1 = дозволені всі немасковані переривання периферійних модулів, 0 = переривання від периферійних модулів заборонені; біт 5: TOIE: Дозвіл переривання по переповнюванню TMR0:
1 = переривання дозволене,
0 = переривання заборонене; біт 4: INTE: Дозвіл зовнішнього переривання INT:
1 = переривання дозволене,
0= переривання заборонене;
біт 3: RBIE: Дозвіл переривання по зміні сигналу на входах RB7:RB4 PORTB:
1= переривання дозволене,
0 = переривання заборонене; біт 2: TOIF: Прапор переривання по переповнюванню TMR0:
1 = відбулося переповнювання TMR0 (скидається програмно), 0 = переповнювання TMR0 не було; біт 1: INTF: Прапор зовнішнього переривання INT:
1 = виконана умова зовнішнього переривання на виведенні
RBO/INT (скидається програмно),
0 = зовнішнього переривання не було;
біт 0: RBIF: Прапор переривання по зміні рівня сигналу на входах RB7:RB4 PORTB:
1 = зафіксована зміна рівня сигналу на одному з входів RB7:RB4 (скидається програмно),
0 = не було зміни рівня сигналу ні на одному з входів RB7:RB4.
Примітка. Прапори переривань встановлюються при виникненні умов переривань незалежно від відповідних бітів дозволу і біта загального дозволу переривань GIE (INTCON<7>).
2.7 Лічильник команд
13-розрядний регістр лічильника команд РС указує адресу виконуваної інструкції. Молодший байт лічильника команд PCL доступний для читання і запису. Старший байт РСН, що містить <12:8> біти лічильника команд РС, не доступний для читання і запису. Всі операції з регістром РСН відбуваються через додатковий регістр PCLATH. При будь-якому виді скидання мікроконтролера лічильник команд РС очищається. На рисунку 2.5 показано дві ситуації завантаження значення в лічильник команд РС. Приклад зверху, запис в лічильник команд РС відбувається при записі значення в регістр PCL (PCLATH <4:0> —> РСН). Приклад знизу, запис значення в лічильник команд РС відбувається при виконанні команди CALL або GOTO (PCLATH <4:3> -» РСН).
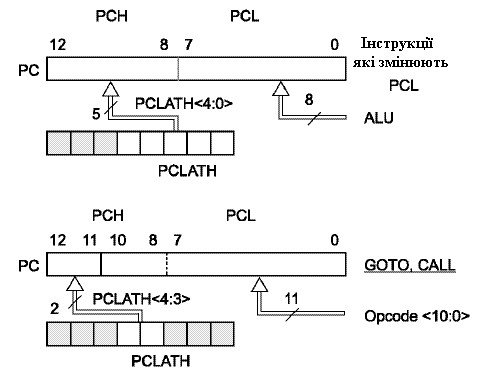
Рисунок 2.5 – Приклади завантаження лічильника команд
Обчислюваний перехід може бути виконаний командою приросту до регістра PCL (наприклад, ADDWF PCL). При виконанні табличного читання обчислюваним переходом слід піклуватися про те, щоб значення PCL не перетнуло межу блоку пам'яті (кожен блок 256 байтів).
Всі мікроконтролери PIC16F87X здатні адресувати 8К слів пам'яті програм. Інструкції переходів (CALL і GOTO) мають 11 -разрядное поле
для вказівки адреси, що дозволяє безпосередньо адресувати 2Кслов пам'яті програм. Для адресації верхніх сторінок пам'яті програм використовуються 2 біта в регістрі PCLATH<4:3>. Перед виконанням команди переходу (CALL або GOTO) необхідно запрограмувати біти регістра PCLATH<4:3> для адресації необхідної сторінки.
При виконанні інструкцій повернення з підпрограми, 13-розрядне значення для лічильника програм РС береться з вершины стека, тому маніпуляція бітами регістра PCLATH<3:4> не потрібна.
Примітка. Вміст регістра PCLATH не змінюється після виконання інструкції RETURN або RETFIE. Користувач винен сам змінити значення регістра PCLATH для подальшого виконання команд GOTO і CALL.
2.8 Стік
PIC16F87X мають 8-рівневий 13-розрядний апаратний стік. Стік не має відображення на пам'ять програм і пам'ять даних, не можна записати або прочитати дані із стека. Значення лічильника команд заноситься у вершину стека при виконанні інструкцій переходу на підпрограму (CALL) або обробки переривань. Читання із стека і запис в лічильник команд РС відбувається при виконанні інструкцій повернення з підпрограми або обробки переривань (RETURN, RETLW, RETFIE), при цьому значення регістра PCLATH не змінюється.
Стек працює як циклічний буфер. Після 8 записів в стек, дев'ятий запис запишеться на місце першого, а десятий запис замінить другий і так далі.
Примітки:
1. У мікроконтролерах не існує ніяких покажчиків про переповнювання стека.
2. У мікроконтролерах не передбачено команд запису/читання із стека, окрім команд виклику/повернення з підпрограм (CALL, RETURN, RETLW і RETFIE) або умов переходу по вектору переривань.
2.9 Порти введення/виводу
Регістри введення/виводу можуть управлятися, як будь-які інші регістри. Проте, команда «читання» (наприклад MOVF 6,W) завжди прочитує фактичний рівень сигналу на виводі порту, незалежно від того, запрограмований цей розряд порту на введення або на вивід. Після сигналу «Скидання» всі порти введення/виводу встановлюються на «введення»
(електрично еквівалентно третьому стану), а регістри керування введенням/виводом (TRISA, TRISB, TRISC, TRISD, TRISE) встановлюються в одиниці (конфігурація на введення). Для того, щоб конфігурувати деякі лінії порту на вивід, необхідно встановити відповідні біти в потрібному регістрі TRIS в «0». Це можна робити командою "TRIS f".
При операціях введення порти не защипуються. Вхідний сигнал повинен бути присутнім поки йде процес читання (напр. MOVF 6, W). При операціях виводу порти защипуються і зберігають значення до тих пір, поки не будуть перезаписані. На рисунку 2.6 не показані діоди, які захищають ніжку порту від зовнішніх імпульсів великої напруги. Вони обмежують імпульсну напругу на ніжці значеннями від Vss - 0,6 до Vdd + 0,6 В. Якщо статична напруга вийде за вказані межі, то виникнуть великі статичні струми, здатні вивести мікроконтролер з ладу.
Деякі канали портів введення/виводу мультипліціровані з периферійними модулями мікроконтролера. Коли периферійний модуль включений, вивід не може використовуватися як універсальний канал введення/виводу.
2.9.1 Регістри PORTА і TRISA
PORTA - 6-розрядний порт введення виводу. Всі канали PORTA мають відповідні біти напряму в регістрі TRISA, що дозволяють настроювати канал як вхід або вихід. Запис ‗1‘ в TRISA переводить відповідний вихідний буфер в 3-й стан. Запис '0' в регістр TRISA визначає відповідний канал як вихід, вміст защіпки PORTA передається на виведення мікроконтролера (якщо вихідна защіпка підключена до виведення мікроконтролера).
Читання регістра PORTA повертає стан на виводах порту, а запис проводиться в защіпку PORTA. Всі операції запису в порт виконуються за принципом «читання - модифікація - запис», тобто спочатку проводиться читання стану виводів порту, потім зміна і запис в защіпку.
RA4 - має трігер Шмідта на вході і відкритий стік на виході, мультипліцірований з тактовим входом TOCKI. Решта всіх каналів PORTA має TTL буфер на вході і повнофункціональні вихідні КМОП буфери.
Канали PORTA мультипліковані з аналоговими входами АЦП і аналоговим входом джерела опорної напруги VREF. Біти управління режимів роботи каналів порту введення/виводу PORTA знаходяться в регістрі ADCON1.
Примітка. Після скидання по включенню живлення виводи настроюються як аналогові входи, а читання дає результат '0'.
Біти регістра TRISA управляють напрямом каналів PORTA, навіть коли вони використовуються як аналогові входи. Користувач повинен упевнитися, що відповідні канали PORTA налаштовані на вхід при використанні їх як аналогові входи.
Структурні схеми виводів порта PORTA показані на рисунку 2.6.
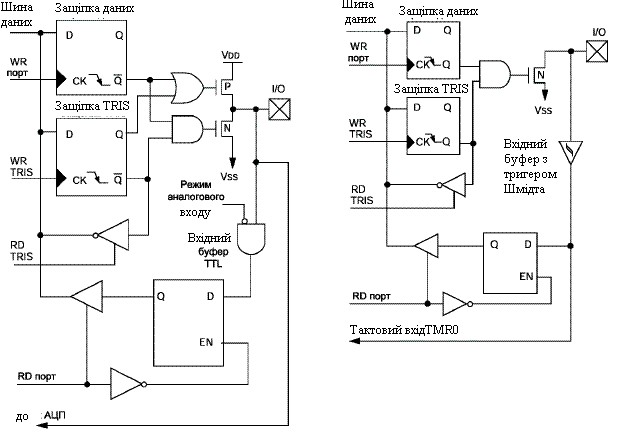
а б
а – виводи RA3-RA0 та RA5 ; б – вивод RA4
Рисунок 2.6 – Структурна схема виводів порта PORTA
2.9.2 Регістри PORTB і TRISB
PORTB - 8-розрядний двонаправлений порт введення/виводу. Біти регістра TRISB визначають напрям каналів порту. Установка битва в 1 регістра TRISB переводить вихідний буфер в 3-й стан. Запис '0' в регістр TRISB настроює відповідний канал як вихід, вміст защіпки PORTB передається на виведення мікроконтролера (якщо вихідна защіпка підключена до виведення мікроконтролера).
Три виведення PORTB мультипліковані з схемою низьковольтного програмування: RB3/PGM, RB6/PGC, RB7/PGD.
До кожного виведення PORTB підключений внутрішній підтягаючий резистор. Біт -RBPU (OPTION_REG <7>) визначає підключені (-RBPU=0) чи ні (-RBPU=1) підтягаючі резистори. Підтягаючі резистори автоматично відключаються, коли канали порту настроюються на вихід і після скидання по включенню живлення POR.
Чотири канали PORTB RB7:RB4, налаштовані на вхід, можуть генерувати переривання по зміні логічного рівня сигналу на вході. Якщо один з каналів RB7:RB4 налаштований на вихід, то він не може бути джерелом переривань. Сигнал на виводах RB7:RB4 порівнюється із значенням, збереженим при останньому читанні PORTB. У разі неспівпадання одного із значень встановлюється прапор RBIF (INTCON<0>), і якщо дозволено, генерується переривання.
Це переривання може вивести мікроконтролер з режиму SLEEP. У підпрограмі обробки переривань необхідно зробити наступні дії:
• Виконати читання або запис в PORTB, виключивши невідповідність;
• Скинути прапор RBIF в '0'.
Невідповідність збереженого значення з сигналом на вході PORTB завжди встановлює біт RBIF в 1. Читання з PORTB перерве умову невідповідності і дозволить скинути прапор RBIF в '0'.
Переривання по зміні сигналу на входах рекомендується використовувати для визначення натиснення клавіш, коли PORTB повністю задіяний для реалізації клавіатури. Не рекомендується опитувати PORTB при використанні переривань по зміні вхідного сигналу.
Переривання по зміні сигналу на входах PORTB і програма перемикання конфігурації цих каналів дозволяє реалізувати простий інтерфейс обслуговування клавіатури з виходом з режиму SLEEP по натисненню клавіш .
RBO/INT вхід зовнішнього джерела переривань, що настроюються бітом INTEDG (OPTION_REG<6>).
Структурна схема виводів порта PORTВ показана на рисунку 2.7.
Примітки:
1. Виводи портів мають захисні діоди, підключені до VDD і Vss-
2. Для включення підтягаючих резисторів необхідно встановити в '1' відповідний біт TRIS і скинути в '0' біт -RBPU (OPTION_REG<7>).
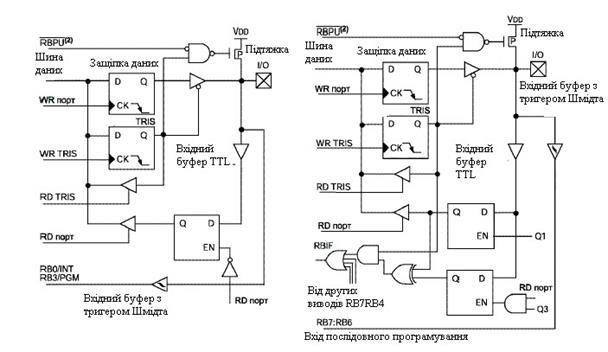
а б
а – виводи RВ3-RВ0 ; б – виводи RВ7-RB4
Рисунок 2.7 – Структурна схема виводів порта PORTВ
2.9.3 Регістри PORTC і TRISC
PORTC - 8-розрядний двонаправлений порт введення/виводу. Біти регістра TRISC визначають напрям каналів порту. Установка бита в '1' регістра TRISC переводить вихідний буфер в 3-й стан. Запис '0' в регістр TRISC настроює відповідний канал як вихід, вміст защіпки PORTC передається на виведення мікроконтролера (якщо вихідна защіпка підключена до виведення мікроконтролера).
Виводи PORTC мультипліковані з декількома периферійними модулями. На каналах PORTC присутній вхідний буфер з трігером Шмідта.
Коли модуль MSSP включений в режимі I2C, виводи PORTC<4:3> можуть підтримувати рівні вихідних сигналів по специфікації I2C або SMBus залежно від стану бита CKE(SSPSTAT<6>).
При використанні периферійних модулів необхідно відповідним чином настроювати біти регістра TRISC для кожного виведення PORTC. Деякі периферійні модулі відміняють дію бітів TRISC примусово настроюючи вивід на вхід або вихід. У зв'язку з чим не рекомендується використовувати команди "Читання - модифікація - запис" з регістром TRISC. Структурна схема виводів порта PORTС показана на рисунку 2.8.
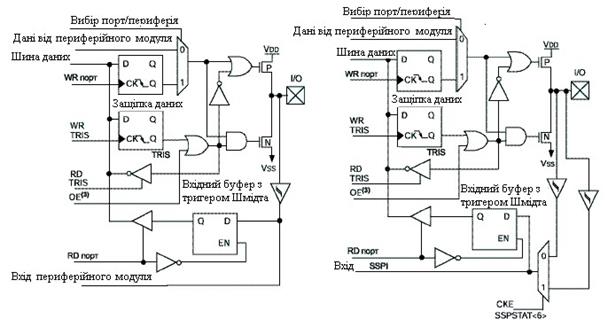
а б
а – виводи RС7-RС5, RС2-RС0; б – виводи RС4-RС3
Рисунок 2.8 – Структурна схема виводів порта PORTC
Примітки:
1. Виводи портів мають захисні діоди, підключені до VDD і Vss. 2. Сигнал режиму каналу - вивід використовується периферійним модулем або цифровий порт введення/виводу.
3. Сигнал дозволу (ОЕ) від периферійного модуля, настроює канал як вихід.
2.9.4 Регістри PORTD і TRISD
PORTD - 8-розрядний двонаправлений порт введення/виводу.
Біти регістра TRISD визначають напрям каналів порту.
PORTD може працювати як 8-розрядний мікропроцесорний порт (ведений паралельний порт), якщо біт PSPMODE (TRISE<4>) встановлений в '1'. У режимі веденого паралельного порту до входів підключені буфери TTL. Структурна схема виводів порта PORTD показана на рисунку 2.9.
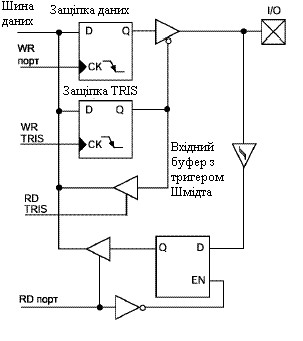
Рисунок 2.9 – Структурна схема виводів порта PORTD
2.9.5 Регістри PORTE і TRISE
PORTE має три виводи (REO/-RD/AN5, RE1/-WR/AN6, RE2/-
CS/AN7), що індивідуально настроюються на вхід або вихід. Виводи PORTE мають вхідний буфер Шмідта.
Канали PORTE стануть керуючими виводами веденого паралельного порту коли біт PSPMODE(TRISE<4>) встановлений в '1'.
У цьому режимі біти TRISE<2:0> повинні бути встановлені в '1'. У регістрі ADCON1 необхідно також настроїти виводи PORTE як цифрові канали введення/виводу. У режимі веденого паралельного порту до виводів PORTE підключені вхідні буфери TTL.
Виводи PORTE мультипліковані з аналоговими входами. Коли канали PORTE настроєні як аналогові входи, біти регістра TRISE управляють напрямом даних PORTE (читання даватиме результат '0'). Структурна схема виводів порта PORTЕ аналогічна схемі порта PORTD.
2.10 Таймери
Контролер PIC16F877 має три багатофункціональні таймери. Кожен модуль таймера/лічільника може працювати окремо або входити складовою частиною в склад модулів спеціального призначення.
2.10.1 Модуль таймера TMR0
TMR0 - таймер/лічильник, має наступні особливості:
• 8-розрядний таймер/лічильник;
• Можливість читання і запису поточного значення лічильника;
• 8-розрядний програмований переддільник;
• Внутрішнє або зовнішнє джерело тактового сигналу;
• Вибір активного фронту зовнішнього тактового сигналу; • Переривання при переповнюванні (перехід від FFh до 00h).
Блок схема модуля TMR0 і загального з WDT переддільника показана на рисунку 2.10.
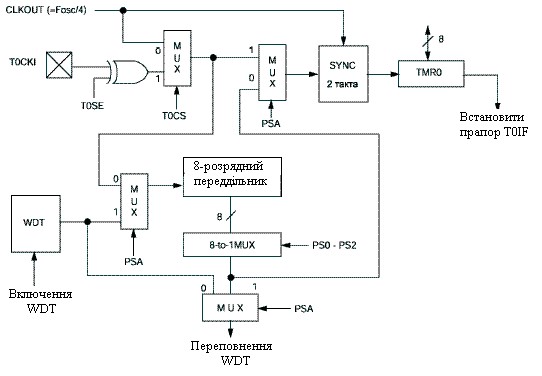
Рисунок 2.10 – Блок схема модуля TMR0
Примітка. Біти управління TOCS, TOSE, PS2, PS1, PSO, PSA розташовані в регістрі OPTION_REG.
Коли біт TOCS скинутий в '0' (OPTION_REG<5>), TMR0 працює від внутрішнього тактового сигналу. Приріст лічильника TMR0 відбувається в кожному машинному циклі (якщо переддільник відключений). Після запису в TMR0 приріст лічильника заборонений два наступні цикли. Користувач повинен скоректувати цю затримку перед записом нового значення в TMR0.
Якщо біт TOCS встановлений в '1' (OPTION_REG<5>), TMR0 працює
від зовнішнього джерела тактового сигналу з входу RA4/TOCKI. Активний фронт зовнішнього тактового сигналу вибирається бітом TOSE в регістрі OPTION_REG<4> (TOSE=0 - активним є передній фронт сигналу). Переддільник може бути включений перед WDT або TMR0, залежно від стану бита PSA (OPTION_REG<3>). Не можна прочитати або записати нове значення в переддільник.
Переривання від TMR0 виникають при переповнюванні лічильника, тобто під час переходу його значення від FFh до 00h. При виникненні переривання встановлюється в '1' біт TOIF(INTCON<2>). Само переривання може бути дозволено/заборонено установкою/скиданням біта TOIE (INTCON<5>). Прапор переривання від TMR0 TOIF (INTCON<2>) повинен бути скинутий в підпрограмі обробки переривань. У SLEEP режимі мікроконтролера модуль TMR0 вимкнений і не може генерувати переривання.
Якщо переддільник не використовується, зовнішній тактовий сигнал поступає безпосередньо на синхронізатор. Синхронізація TOCKI з таким сигналом мікроконтролера ускладнюється із-за опиту виходу синхронізатора в машинні цикли Q2 і Q4. Тому тривалість високого або низького логічного рівня зовнішнього сигналу повинна бути не менше 2Tosc (плюс невелика затримка внутрішнього RC ланцюга 20нс).
8-розрядний лічильник може працювати як переддільник TMR0 або вихідний дільник WDT. Для простоти опису цей лічильник завжди називатимемо «переддільник». Зверніть увагу, що існує тільки один переддільник, який може бути включений перед TMR0 або WDT. Використання переддільника перед TMR0 означає, що WDT працює без переддільника, і навпаки.
Коефіцієнт ділення переддільника визначається бітами PSA і PS2:PSO в регістрі OPTION_REG<3:0>.
Якщо переддільник включений перед TMR0, будь-які команди запису в TMR0 (наприклад, CLRF 1, MOVWF 1, BSF 1,х і т.д.) скидають переддільника. Коли переддільник підключений до WDT, команда CLRWDT скине переддільника разом з WDT. Переддільник також очищається при скиданні мікроконтролера. Переддільник недоступний для читання/запису.
Примітка. Запис в регістр TMR0 скине переддільника, якщо він підключений до TMR0, але не змінить його режиму роботи.
2.10.2 Модуль таймера TMR1
TMR1 - 16-розрядний таймер/лічильник, що складається з двох 8розрядних регістрів (TMR1H і TMR1L) доступних для читання і запису.
Рахунок виконується в спарених регістрах (TMR1H : TMR1L), інкрементуючи їх значення від 0000h до FFFFh, далі рахує з 0000h. При переповнюванні лічильника встановлюється в ‗1‘ прапор переривання
TMR1IF в регістрі PIR1<0>. Само переривання можна дозволити/заборонити установкою/скиданням, біта TMR1IE в регістрі Р1Е1<0>. Блок схема модуля TMR1 показана на рисунку 2.11.
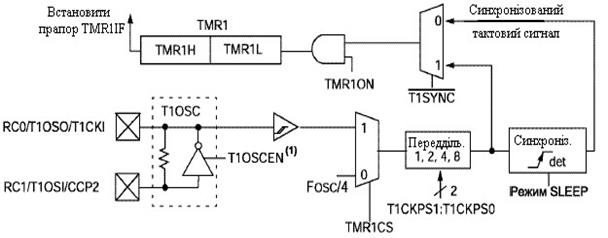
Рисунок 2.11 – Блок схема модуля TMR1
Примітка. Якщо T1OSCEN=0, то інвертуючий елемент і резистивний зворотний зв'язок вимкнені для зменшення струму споживання.
TMR1 може працювати в двох режимах:
• Режим таймера; • Режим лічильника.
Включення модуля TMR1 здійснюється установкою бита TMR1ON в ‗1‘ (Т1СОМ<0>).
Бітом TMR1CS (T1CON<1>) вибирається джерело тактових імпульсів. У режимі таймера TMR1 інкрементується на кожному машинному циклі. Якщо TMR1 працює із зовнішнім джерелом тактового сигналу, то приріст відбувається по кожному передньому фронту сигналу.
TMR1 має внутрішній вхід скидання від модуля СРР .
Коли включений генератор тактових імпульсів (T1OSCEN=1), виводи
RC1/T1OSI/CCP2 і RCO/T1OSO/T1CKI настроєні як входи. Значення бітів TRISC<1:0> ігнорується, а читання даних з цих виводів дає результат '0'. Керуючі биті TMR1 знаходяться в регістрі T1CON (адреса 10h):
b7 b6 b5 b4 b3 b2 b1 b0
 - - T1CKPS1 T1CKPS0 T1OSCEN -T1SYNC TMR1CS TMR1ON
- - T1CKPS1 T1CKPS0 T1OSCEN -T1SYNC TMR1CS TMR1ON
біти 7-6: не реалізовані: читаються як '0';
біти 5-4: T1CKPS1:T1CKPS0: вибір коефіцієнта ділення переддільника TMR1 11 = 1:8, 10= 1:4, 01 = 1:2, 00=1:1;
біт 3:T1OSCEN: включення тактового генератора TMR1: 1 = генератор включений, 0 = генератор вимкнений (інвертуючий елемент і резистивний зворотний зв'язок вимкнені для
зменшення струму споживання);
біт 2: -T1SYNC: синхронізація зовнішнього тактового сигналу TMR1CS = 1
1 = не синхронізувати зовнішній тактовий, 0 = синхронізувати зовнішній тактовий,
TMR1CS = 0 : значення біта ігнорується;
біт 1: TMR1CS: вибір джерела тактового сигналу:
1 = зовнішнє джерело з виведення RCO/T1OSO/T1CKI (активним є передній фронт сигналу),
0 = внутрішнє джерело Fosc/4
біт 0: TMR1ON: Включення модуля TMR1: 1=включений,
0 = вимкнений.
В режимі таймера приріст походить від внутрішнього сигналу Fosc/4, коли біт TMR1CS (T1CON<1>) скинутий в '0'. У цьому режимі біт синхронізації T1SYNC (Т1СОМ<2>) ігнорується, тому що внутрішній тактовий сигнал завжди синхронізований.
В режимі лічильника TMR1 може працювати в синхронному або асинхронному режимі залежно від стані бита TMR1CS. Коли TMR1 використовує зовнішній тактовий сигнал, приріст таймера відбувається по передньому фронту. Включивши TMR1 в режим зовнішнього тактового сигналу рахунок почнеться тільки після появи заднього фронту.
В режимі синхронного лічильника робота TMR1 від зовнішнього джерела тактового сигналу вибирається установкою біта TMR1CS в ‗1‘. В цьому режимі приріст таймера відбувається по кожному передньому фронту сигналу на виведенні RC1/T1OSI/CCP2 (якщо T1OSCEN=1) або RCO/T1OSO/T1CKI (якщо T1OSCEN=0).
Якщо -T1SYNC=0, то активний фронт зовнішнього тактового сигналу синхронізується з внутрішнім тактовим сигналом на виході асинхронного переддільника.
У SLEEP режимі мікроконтролера лічильник не буде інкрементуватися (за наявності тактового сигналу), оскільки синхронізатор вимкнений (переддільник продовжує рахунок тактових імпульсів)
В режимі асинхронного лічильника, якщо біт -T1SYNC (T1CON<2>) встановлений в ‗1‘, зовнішній тактовий сигнал TMR1 не синхронізуватиметься з внутрішнім тактовим сигналом мікроконтролера, таймер продовжує працювати в режимі SLEEP. Переповнювання таймера викличе «пробудження» мікроконтролера, якщо дозволено переривання від TMR1. Проте потрібна обережність при записі/читанні TMR1. У цьому режимі TMR1 не може використовуватися для захоплення/порівняння даних модуля РСР.
Читання TMR1Н або TMR1L, під час рахунку в асинхронному режимі, гарантує отримання поточного значення лічильника (реалізовано апаратно). Проте користувач повинен мати на увазі, що читання 16розрядного значення виконується по байтно. Це накладає деякі обмеження, оскільки таймер може переповнитися між читаннями байтів.
Запис в TMR1 рекомендується виконувати після зупинки таймера.
Запис в регістри TMR1 під час приросту таймера може привести до непередбачуваного значення регістра.
Якщо модуль ССР1 або ССР2 працює в режимі порівняння з трігером спеціальних функцій (ССР1МЗ : ССР1 М0=1011), то сигнал трігера скине TMR1. TMR1 повинен працювати в режимі синхронізованого зовнішнього тактового сигналу або внутрішнього тактового сигналу. У асинхронному режимі ця функція не працює.
Коли запис в TMR1 співпадає з сигналом скидання від трігера спеціальних подій, пріоритет віддається запису в TMR1.
У цьому режимі модуля ССР період скидання TMR1 зберігається в регістрах CCPRxH:CCPRxL.
Регістри TMR1Н і TMR1L не скидаються в 00h при скиданні по включенню живлення POR і інших видах скидання, окрім скидання по сигналу трігера спеціальних подій модуля ССР1 або ССР2.
Регістр T1CON скидається в 00h при скиданні POR і BOR (TMR1 вимикається, коефіцієнт переддільника рівний 1:1). При решті всіх видів скидання значення регістра Т1CON не змінюється.
Переддільник TMR1 очищається при записі в регістр TMR1L або TMR1Н.
2.10.3 Модуль таймера TMR2
TMR2 - 8-розрядний таймер з програмованими переддільником і вихідним дільником, 8-розрядним регістром періоду PR2. TMR2 може бути опорним таймером для ССР модуля в ШІМ режимі. Регістри TMR2 доступні для запису/читання і очищаються при будь-якому виді скидання.
Вхідний тактовий сигнал (Fosc/4) поступає через переддільника з програмованим коефіцієнтом ділення (1:1, 1:4 або 1:16), визначуваний бітами T2CKPS1 :T2CKPSO (T2CON<1:0>).
TMR2 рахує, інкрементуючи від 00h до значення в регістрі PR2, потім скидається в 00h на наступному машинному циклі. Регістр PR2 доступний для запису і читання. Після скидання значення регістра PR2 рівне FFh. Блок схема модуля TMR2 показана на рисунку 2.12.
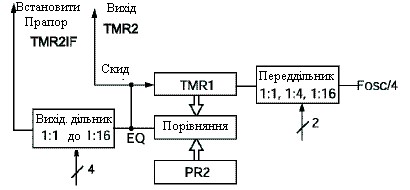
Рисунок 2.12 – Блок схема модуля TMR2
Сигнал переповнювання TMR2 проходить через вихідного 4розрядного дільника з програмованим коефіцієнтом ділення (від 1:1 до 1:16 включно) для установки прапора TMR2IF в регістрі PIR1 <1 >.
Для зменшення енергоспоживання таймер TMR2 може бути вимкнений скиданням біта TMR2ON (Т2СОМ<2>) в'0'.
TMR2 може використовуватися для програмного вибору швидкості обміну даними модуля SSP.
Керуючі биті TMR2 знаходяться в регістрі T2CON (адреса 12h):
b7 b6 b5 b4 b3 b2 b1 b0
| - |
TOUTPS3 |
TOUTPS2 |
TOUTPS1 |
TOUTPS0 |
TMR2ON |
T2CKPS1 |
T2CKPS0 |
біт 7: не реалізований: читається як '0';
біти 6-3: TOUTPS3:TOUTPS0: вибір коефіцієнта вихідного дільника TMR2 0000=1:1
0001 = 1:2 0010 = 1:3
...
1111 =1:16
біт 2: TMR2ON: включення модуля TMR2 1 = включений,0= вимкнений; біти 1 - 0: T2CKPS1 :T2CKPSO: вибір коефіцієнта ділення переддільника TMR2: 00= 1:1
01=1:4
1х= 1:16 Лічильник переддільника і вихідного дільника скидаються у випадку:
• Запису в регістр TMR2;
• Запису в регістр T2CON;
• Будь-якого виду скидання мікроконтролера (POR, BOR, скидання
WDT або активний сигнал -MCLR).
Регістр TMR2 не очищається при запису в T2CON.
Сигнал переповнювання TMR2 (до вихідного переддільника) поступає в модуль SSP для управління швидкістю передачі даних.
2.11 Модуль 10-розрядного АЦП
Модуль аналого-цифрового перетворення (АЦП) має п'ять каналів у 28-вивідних мікросхем і вісім каналів у 40/44-вивідних мікросхем.
Вхідний аналоговий сигнал через комутатор каналів заряджає внутрішній конденсатор АЦП СHOLD . Модуль АЦП перетворить напруга, що утримується на конденсаторі СHOLD у відповідний 10-розрядний цифровий код методом послідовного наближення. Джерело верхньої і нижньої опорної напруги може бути програмно вибране з виводів Vdd, Vss, RA2 або RA3.
Допускається робота модуля АЦП в SLEEP режимі мікроконтролера, при цьому як джерело тактових імпульсів для АЦП повинен бути вибраний RC генератор.
Для управління АЦП в мікроконтролері використовується 4 регістри:
• Регістр результату ADRESH (старший байт);
• Регістр результату ADRESL (молодший байт);
• Регістр управління ADCON0; • Регістр управління ADCON1.
Регістр ADCON0 використовується для настройки роботи модуля АЦП, а за допомогою регістра ADCON1 встановлюється які входи мікроконтролера використовуватимуться модулем АЦП і в якому режимі (аналоговий вхід або цифровий порт введення/виводу).
ADCON0 (адреса 1Fh)
b7 b6 b5 b4 b3 b2 b1 b0
| ADCS1 |
ADCS0 |
CHS2 |
CHS1 |
CHS0 |
GO/- DONE |
- |
ADON |
біти 7-6: ADCS1: ADCS0: Вибір джерела тактового сигналу
00 = Fosc/2
01 = Fosc/8
10 = Fosc/32
11 = Frc (внутрішній RC генератор модуля АЦП) біти 5-3: CHS2:CHS0: Вибір аналогового каналу
000= канал 0 (RAO/ANO)
001= канал 1(RA1/AN1)
010= канал 2 (RA2/AN2)
011= канал 3 (RA3/AN3)
100= канал 4 (RA5/AN4)
101= канал 5 (RE0/AN5)
110= канал 6 (RE1/AN6)
111 = канал 7 (RE2/AN7)
біт 2: GO/-DONE: Біт статусу модуля АЦП Якщо ADON=1
1 = модуль АЦП виконує перетворення (установка біта викликає початок перетворення)
0 = стан очікування (апаратно скидається по завершенню перетворення) біт 1: Не використовується: читається як '0' біт 0: ADON: Біт включення модуля АЦП
1 = модуль АЦП включений 0 = модуль АЦП вимкнений і не споживає струму.
ADCON1 (адреса 9Fh)
b7 b6 b5 b4 b3 b2 b1 b0
![]()
біт 7: ADFM: Формат збереження 10-розрядного результату 1 = праве вирівнювання, 6 старших біт ADRESH читаються як '0' 0 = ліве вирівнювання, 6 молодших біт ADRESL читаються як '0' біти 6-4: Не використовуються: читаються як '0'; биті 3-0: PCFG3:PCFG0: Керівні біти настройки каналів АЦП їх значення приведене в таблиці 2.3.
Таблиця 2.3 - Біти настройки каналів АЦП
| PCGF3: PCGF0 |
AN7 RE2 |
AN6 RE1 |
AN5 RED |
AN4 RA5 |
AN3 RA3 |
AN2 RA2 |
AN1 RA1 |
AND RAO |
VREF+ |
VREF- |
Кан./ VREF |
| 0000 |
А |
A |
A |
A |
A |
A |
A |
A |
VDD |
VSS |
8/0 |
| 0001 |
А |
A |
A |
A |
VREF+ |
A |
A |
A |
RA3 |
VSS |
7/1 |
| 0010 |
D |
D |
D |
A |
A |
A |
A |
A |
VDD |
VSS |
5/0 |
| 0011 |
D |
D |
D |
A |
VREF+ |
A |
A |
A |
RA3 |
VSS |
4/1 |
| 0100 |
D |
D |
D |
D |
A |
D |
A |
A |
VDD |
VSS |
3/0 |
| 0101 |
D |
D |
D |
D |
VREF+ |
D |
A |
A |
RA3 |
VSS |
2/1 |
| 011х |
D |
D |
D |
D |
D |
D |
D |
D |
VDD |
VSS |
0/0 |
| 1000 |
А |
A |
A |
A |
VREF+ |
VREF- |
A |
A |
RA3 |
RA2 |
6/2 |
| 1001 |
D |
D |
A |
A |
A |
A |
A |
A |
VDD |
VSS |
6/0 |
| 1010 |
D |
D |
A |
A |
VREF+ |
A |
A |
A |
RA3 |
VSS |
5/1 |
| 1011 |
D |
D |
A |
A |
VREF+ |
VREF- |
A |
A |
RA3 |
RA2 |
4/2 |
| 1100 |
D |
D |
D |
A |
VREF+ |
VREF- |
A |
A |
RA3 |
RA2 |
3/2 |
| 1101 |
D |
D |
D |
D |
VREF+ |
VREF- |
A |
A |
RA3 |
RA2 |
2/2 |
| 1110 |
D |
D |
D |
D |
D |
D |
D |
A |
VDD |
Vss |
1/0 |
| 1111 |
D |
D |
D |
D |
VREF+ |
VREF- |
D |
A |
RA3 |
RA2 |
1/2 |
| А = аналоговий вхід; D = цифровий канал введення/виводу. |
|||||||||||
В останньому стовпці указується число аналогових каналів, доступних для перетворення і число входів джерела опорної напруги.
У регістрі ADRESH:ADRESL зберігається 10-розрядний результат аналого-цифрового перетворення. Коли перетворення завершене, результат перетворення записується в регістр ADRESH:ADRESL, після чого скидається прапор GO/-DONE (ADCON0<2>) і встановлюється прапор переривання ADIF. Структурна схема модуля АЦП показана на рисунку 2.13.
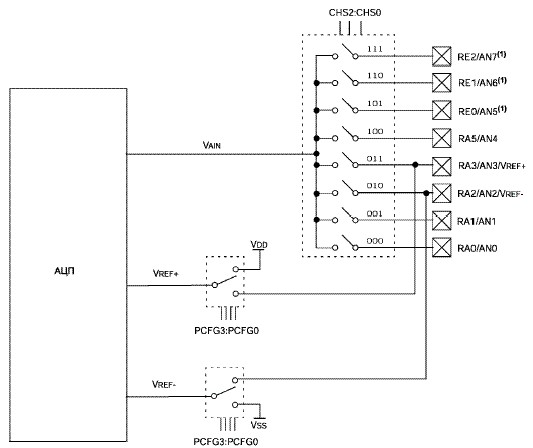
Рисунок 2.13 - Структурна схема модуля АЦП
Після включення і конфігурації АЦП вибирається робочий аналоговий канал. Відповідні біти TRIS аналогових каналів повинні настроювати порт введення/виводу на вхід.
Рекомендована послідовність дій для роботи з АЦП:
1. Настроїти модуль АЦП: • Настроїти виводи як аналогові входи, входи VREF або цифрові канали введення/виводу (ADCON1);
• Вибрати вхідний канал АЦП (ADCON0);
• Вибрати джерело тактових імпульсів для АЦП (ADCON0);
• Включити модуль АЦП (ADCON0).
2. Настроїти переривання від модуля АЦП (якщо необхідно):
• Скинути біт ADIF в '0';
• Встановити біт ADIE в '1'; • Встановити біт PEIE в '1'; • Встановити біт GIE в '1'.
3. Витримати паузу, необхідну для зарядки конденсатора СHOLD-
4. Почати аналого-цифрове перетворення:
•Встановити біт GO/-DONE в '1' (ADCON0).
5. Чекати закінчення перетворення:
• Чекати поки біт GO/-DONE не буде скинутий в '0'; або • Чекати переривання по закінченню перетворення.
6. Прочитати результат перетворення з регістрів ADRESH: ADRESL, скинути біт ADIF в '0', якщо це необхідно.
7. Для наступного перетворення необхідно виконати кроки починаючи з пункту 1 або 2. Час перетворення одного біта визначається як час ТAD. Мінімальний час очікування перед наступним перетворенням повинен складати не менше 2ТAD.
2.12 Переривання
PIC16F87X мають 14 джерел переривань. Регістр INTCON містить прапори окремих переривань, біти дозволу цих переривань і біт глобального дозволу переривань.
Якщо біт GIE (INTCON<7>) встановлений в ‗1‘, дозволені всі немасковані переривання. Якщо GIE=0, то всі переривання заборонені.
Кожне переривання окремо може бути дозволене/заборонене установкою/скиданням відповідного біта в регістрах INTCON, PIE1 і PIE2. При скиданні мікроконтролера біт GIE скидається в '0'. При поверненні з підпрограмі обробки переривання, по команді RETFIE, біт GIE апаратно встановлюється в ‗1‘ дозволяючи всі немасковані переривання.
У регістрі INTCON знаходяться прапори наступних переривань:
зовнішнього сигналу INT, зміни рівня сигналу на входах RB7:RB4, переповнювання TMR0.
У регістрах PIR1, PIR2 містяться прапори переривань периферійних модулів мікроконтролера, а в регістрах PIE1, PIE2 відповідні біти дозволу переривань. У регістрі INTCON знаходиться біт дозволу переривань від периферійних модулів.
При переході на підпрограму обробки переривань біт GIE апаратно скидається в '0', забороняючи переривання, адреса повернення з підпрограми обробки переривань поміщається в стек, а в лічильник команд РС завантажується вектор переривання 0004h. Джерело переривань може бути визначене перевіркою прапорів переривань, які повинні бути скинуті програмно перед дозволом переривань, щоб уникнути повторного виклику.
Для зовнішніх джерел переривань (сигнал INT, зміни рівня сигналу на входах RB7:RB4) час переходу на підпрограму обробки переривань складатиме 3-4 машинних цикли. Точний час переходу залежить від конкретного випадку, він однаковий для 1 і 2-х циклових команд. Прапори переривань встановлюються незалежно від стану відповідних бітів маски і біта GIE.
Примітка. Індивідуальні прапори переривань встановлюються незалежно від стану відповідних бітів маски і біта GIE.
Структурна схема логіки переривань показана на рисунку 2.14.
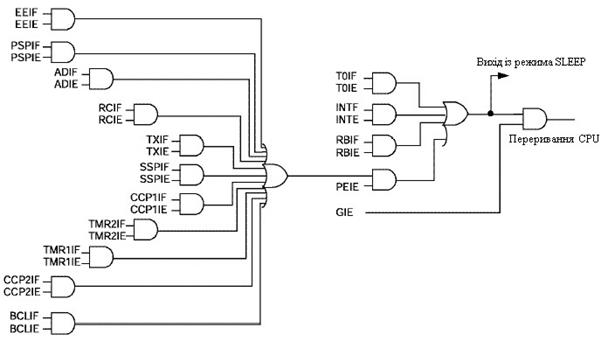
Рисунок 2.14 - Структурна схема логіки переривань
Зовнішнє переривання з входу RB0/INT відбувається: по передньому фронту сигналу, якщо біт INTEDG (OPTION_REG<6>) встановлений в '1'; по задньому фронту сигналу, якщо біт INTEDG скинутий в '0'. Коли активний фронт сигналу з'являється на вході RB0/INT біт INTF (INTCON<1>) встановлюється в '1'. Переривання може бути заборонене скиданням біта INTE (INTCON<4>) в '0'. Прапор переривання INTF повинен бути скинутий програмно в підпрограмі обробки переривань. Переривання INT може вивести мікроконтролер з режиму SLEEP, якщо біт INTE=1 до переходу в режим SLEEP. Стан бита GIE визначає, переходити на підпрограму обробки переривань після виходу з режиму SLEEP чи ні.
Переповнювання таймера TMR0 (FFh -> 00h) встановлює прапор TOIF (INTCON<2>) в ‗1‘. Переривання від TMR0 можна дозволити/заборонити установкою/скиданням біта TOIE (INTCON<5>). Зміна рівня сигналу на входах RB7:RB4 викликає установку прапора RBIF (INTCON<0>). Переривання можна дозволити/заборонити установкою/скиданням біта RBIE (INTCON<4>).
2.13 Сторожовий таймер WDT
Вбудований сторожовий таймер WDT працює від окремого генератора RC, що не вимагає зовнішніх компонентів. Це дозволяє працювати сторожовому таймеру WDT при вимкненому тактовому генераторі (виводи OSC1, OSC2) в SLEEP режимі мікроконтролера. У нормальному режимі роботи при переповнюванні WDT відбувається скидання мікроконтролера. Якщо мікроконтролер знаходиться в SLEEP режимі, переповнювання WDT виводить його з режиму SLEEP з продовженням нормальної роботи. WDT вимкнений, якщо WDTE = 0 в слові конфігурації.
Час переповнювання залежить від температури, напруги живлення VDD і розкиду технологічних параметрів мікроконтролера. Якщо потрібний більший час переповнювання WDT, необхідно програмно підключити переддільника в регістрі OPTION_REG з максимальним коефіцієнтом ділення 1:128. Примітки:
1. Команди CLRWDT і SLEEP скидають сторожовий таймер і переддільника, якщо він підключений до WDT, відкладаючи скидання пристрою.
2. Команда CLRWDT скидає сторожовий таймер і переддільника, якщо він підключений до WDT, але не змінює коефіцієнт ділення переддільника.
Структурна схема сторожового таймера WDT показана на рисунку 2.15.
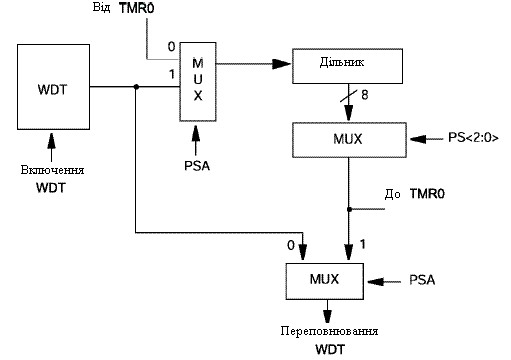
Рисунок 2.15 - Структурна схема сторожового таймера WDT
2.14 Біти конфігурації
Біти конфігурації розташовані в пам'яті програм за адресою 2007h, вони можуть бути запрограмовані в '0' або залишеними в ‗1‘. Відмітьте, що адреса 2007h розташована за межами призначеної для користувача пам'яті програм. Фактично, до конфігураційного регістра (область пам'яті 2000h - SFFFh) можна звернутися тільки в режимі програмування мікроконтролера.
Слово конфігурації (адреса 2007h)
![]() СР1 | СРО| DEBUG | - |WRT| CPD | LVP | BODEN | СР1 | СРО |-PWRTE| WDTE | FOSC1 | FOSCO |
СР1 | СРО| DEBUG | - |WRT| CPD | LVP | BODEN | СР1 | СРО |-PWRTE| WDTE | FOSC1 | FOSCO |
Біт 13 Біт 0
Біти 13-12: СР1:СРО: Біти захисту пам'яті програм
11 = захист пам'яті програм вимкнений
10 = захищена пам'ять програм з адресами 1F00h-1FFFh
01 = захищена пам'ять програм з адресами 1000h-1FFFh 00 = захищена пам'ять програм з адресами 0000h-1FFFh біт 11: DEBUG: Біт включення режиму внутрішньосхемної відладки
1 = внутрішньосхемна відладка вимкнена, виводи RB6 і
RB7 працюють як канали вводу/виводу
0 = внутрішньосхемна відладка включена, виводи RB6 і RB7 використовуються відладчиком
біт 10: Не реалізований: читається як '1'
біт 9: WRT: Біт дозволу запису в FLASH пам'ять програм 1 = дозволений запис в FLASH пам'ять програм через регістри управління EECON
0= заборонений запис в FLASH пам'ять програм через регістри управління EECON
біт 8: CPD: Біт захисту EEPROM пам'яті даних
1= захист пам'яті даних вимкнений
0 = захист пам'яті даних включений
біт 7: LVP: Біт дозволу низьковольтного програмування 1 = виведення RB3/PGM працює як PGM, режим низьковольтного програмування включений 0 = виведення RB3/PGM працює як цифровий порт введення/виводу, виведення HV використовується для програмування мікроконтролера
біт 6: BODEN: Біт дозволу скидання по зниженню напруги живлення
1= дозволено скидання BOR
0= заборонено скидання BOR
біт 3: -PWRTE: Біт дозволу роботи таймера включення живлення
1= PWRT вимкнений
0= PWRT включений
біт 2: WDTE: Біт дозволу роботи сторожового таймера
1= WDT включений 0 = WDT вимкнений
биті 1-0: FOSC1:FOSCO: Біти вибору режиму тактового генератора
11 = RC генератор
10 = HS генератор
01 = XT генератор
00 = LP генератор
Примітки:
1. При стиранні всієї пам'яті мікроконтролера в слово конфігурації записується значення SFFFh.
2. Щоб встановити захист пам'яті програм, всі пари СР1 :СРО повинні мати однакове значення.
3. При виникненні скидання по зниженню напруги живлення (BOR) автоматично запускається таймер PWRT, незалежно від стану бита PWRTE.
2.15 Система команд
Кожна команда мікроконтролерів PIC16F87X складається з одного 14-розрядного слова, розділеного на код операції (OPCODE), що визначає тип команди і один або декілька операндів, що визначають операцію команди. Повний список команд дивитеся в додатку В. Команди розділені на наступні групи: байт орієнтовані команди, біт орієнтовані команди, команди управління і операцій з константами. Опис полів коду операції дивитеся в таблиці 2.4.
Для байт орієнтованих команд ‗f‘ є покажчиком регістра, а ‗d‘ покажчиком адресата результату. Покажчик регістра визначає, який регістр повинен використовуватися в команді. Покажчик адресата визначає, де буде збережений результат. Якщо 'd'=0, результат зберігається в регістрі W. Якщо 'd'=1, результат зберігається в регістрі, який використовується в команді.
У біт орієнтованих командах 'b' визначає номер бита що бере участь в операції, а ‗f‘ - покажчик регістра, який містить цей біт.
Таблиця 2.4 - Опис полів коду операції
Поле Опис
f Адреса файлового регістра (від 0x00 до 0x7F)
W Робочий регістр (акумулятор) b Адреса бита усередині 8-ми бітового регістра k Символьне поле, константа або мітка Будь-яке значення(=0 або 1) x Компілятор згенерує код з x=0 це потрібно для сумісності зі всіма програмними продуктами Microchip. Вибір де зберігати результат:
d=0
d (зберігати в W)
d=1 (зберігати в f)
За умовчанням d=1 label Ім'я мітки
TOS Вершина стека
PC Лічильник команд (програмний лічильник)
PCLATH Записуваний буфер для старших 5-ти біт РС
GIE Прапор дозволу глобальних переривань
WDT Сторожовий таймер
| TO |
біт Таймауту (Time-out bit) |
| PD |
біт пониження живлення (Power-Down bit) |
| dest |
Призначення, або регістр W або інший регістр вказаний в описі команди |
| [ ] |
Опціонально, тобто необов'язкове використання запису, який поміщений в квадратні дужки |
| ( ) |
Вміст |
| -> |
Занести в |
| < > |
Бітове поле в регістрі |
У командах управління або операціях з константами 'к' представляє вісім або одинадцять біт константи або значення літералів.
Система команд акумуляторного типу, ортогональна і розділена на три основні групи:
• Байт орієнтовані команди;
• Біт орієнтовані команди;
• Команди управління і операцій з константами.
Всі команди виконуються за один машинний цикл, окрім команд умови, в яких отриманий дійсний результат і інструкцій , що змінюють значення лічильника команд РС. У разі виконання команди за два машинні цикли, в другому циклі виконується інструкція NOP. Один машинний цикл складається з чотирьох тактів генератора. Для тактового генератора з частотою 4 Мгц всі команди виконуються за 1мкс, якщо умова істинна або змінюється лічильник команд РС, команда виконується за 2мкс. На рисунку 2.16 показана форма команд трьох основних груп.
Байт-орієнтовані операції з файловим регістром
13 8 7 6 0
OPCODE d f(FILE #)
d = 0 для запису результата в W
d = 1 для запису результата в f f = 7-ми бітна адреса файлового регістра
Біт-орієнтовані операції з файловим регістром
13 10 9 7 6 0
OPCODE b (BIT #) f(FILE #)
b = 3-х бітна адреса
f = 7-ми бітна адреса файлового регістра
Символьні команди і команди управління (загальний вигляд)
13 8 7 0
OPCODE k (символ)
k = 8-ми бітне безпосереднє значення
Команди управління - GOTO и CALL
13 11 10 0
OPCODE k (символ)
k = 11-ти бітне безпосереднє значення
Рисунок 2.16 -Форма команд трьох основних груп
Примітка. Для сумісності програмного забезпечення з наступними версіями мікроконтролерів PICmicro не використовуйте команди TRIS і OPTION.
3 ПРОГРАМУВАННЯ РІС – МІКРОКОНТРОЛЕРІВ
Технологія розробки і відладки робочих програм для ОМК PIC відрізняється від традиційної тільки набором інструментальних засобів. Написання початкового тексту програми можливе на одній з наступних мов: Асемблері, Макроасемблері і СІ. На цьому етапі можуть використовуватися будь-які текстові редактори. Для компіляції програм може бути використаний відповідний компілятор з мови СІ або Асемблер МРАSM . Відладка програм може бути здійснена з використанням програмних симуляторов MPSIM або внутрішньосхемних емуляторів реального часу PICMASTER або ICE PIC . Запис відладженої програми в ПЗУ ОМК здійснюється за допомогою спеціальних програматорів, наприклад, типу PIC START, KOM PIC, PIC LAB-16 і т.п..
Для цих же цілей можна скористатися інтегрованими середовищами picDesigner або MPLAB IDE 6.50, які є могутні пакети інструментальних засобів аналогічні вказаним вище.
Розглянемо детальніше ці питання для випадку написання робочих програм на Асемблері.
3.1 Правила запису програм на мові Асемблера
Початковий текст програми на мові асемблера має певний формат. Кожна команда (і псевдокоманда) є рядком чотирьохланкової конструкції:
МІТКА ОПЕРАЦІЯ ОПЕРАНД(и) КОМЕНТАР
Ланки (поля) можуть відділятися одна від одної довільним числом пропусків. Порядок і позиція полів важливі. Так, мітки повинні починатися в першому стовпці. Операція (мнемоніка команди) може починатися в другому стовпці або поза ним.
Операнди слідують за мнемонікою команди. Коментарі можуть слідувати за операндами, мнемонікою або мітками, і можуть починатися в будь-якому стовпці. Максимальна ширина стовпця - 255 символів. Один або більшу кількість пропусків повинен відокремити мітку і мнемоніку команди, і мнемоніку і операнд(и). Операнди повинні відділятися комою.
Наприклад:
;
; Приклад фрагмента початкової програми ―Ініціалізація МК―
BEGIN
MOVLW INITA ; Завантаження в робочий регістр W
; значення, привласненого імені
; INITA (значення ,константа або
; число) повинно бути ; привласнено раніше в
; попередніх фрагментах
; програми!)
| MOVWF |
TRISA |
; Завантаження значення з робочого ; регістра W в регістр ; управління конфігурацією ; порту А |
| MOVLW |
INITB |
; Завантаження в робочий регістр W ; значення, привласненого імені ; INITB |
| MOVWF |
TRISB |
; Завантаження значення з робочого ; регістра W в регістр управління ; конфігурацією порту В |
Мітка . У полі мітки розміщується символічне ім'я елементу пам'яті, в якій зберігається відмічена команда або операнд. Мітка є буквеноцифровою комбінацією, що починається з букви. Використовуються тільки букви латинського алфавіту. Асемблер допускає використання в мітках символу підкреслення(_). Довжина мітки може бути від 6 до 32 (наприклад для MPASM) символів. Мітки можуть супроводжуватися двокрапкою (:), пропуском, табуляцією або кінцем рядка.
Як символічні імена і мітки не можуть бути використані мнемокоди команд, псевдокоманд і операторів Асемблера, а також мнемонічні позначення регістрів і інших внутрішніх блоків МК.
Операція . У полі операції записується мнемонічне позначення команди МК або псевдокоманди асемблера, яке є скороченням (абревіатурою) повного англійського найменування виконуваної дії. Якщо є мітка на тому ж самому рядку, то мнемоніка команди асемблера, директиви асемблера і макрозвернення повинні відділятися від цієї мітки двокрапкою або одним або великою кількістю пропусків або міток табуляції.
Операнди . У цьому полі поміщаються операнди (або операнд), які приймають участь в операції. Операнди повинні відділятися від мнемоніки одним або більше пропусків або міток табуляції. Списки операндів (операнди) повинні відділятися комами.
Команди можуть бути без-, одно-, або двооперандними.
Операнд може бути заданий безпосередньо або у вигляді його адреси (прямої або непрямої). Безпосередній операнд представляється числом (MOVLW 0FFh, де символ 0 для Асемблера означає, що це число FFh, а не мітка або, MOVLW B'01010011', де В - позначає двійкове число) або символічним ім'ям (MOVWF DATAPORT).
Використовувані як операнди символічні імена і мітки повинні бути визначені, а числа представлені з вказівкою системи числення, для чого використовується префікс (буква, що стоїть перед числом): В - для двійкової, Q - для вісімкової, D - для десяткової, Н - для шістнадцяткової.
Число без префікса за умовчанням вважається десятковим.
Псевдокоманди асемблера. Асемблююча програма транслює початкову програму в об‘єктні коди. Хоча транслююча програма бере на себе багато з рутинних завдань програміста, такі як привласнення дійсних адрес, перетворення чисел, привласнення дійсних значень символьним змінним і т.п., програміст все ж таки повинен вказати їй деякі параметри: початкова адреса робочої програми, кінець асембльованої програми, формати даних і т.п. Всю цю інформацію програміст вставляє в початковий текст своєї прикладної програми у вигляді псевдокоманд (директив) асемблера, які тільки управляють процесом трансляції і не перетворяться в коди об‘єктної програми.
Псевдокоманда ORG 100H задає асемблеру адресу елементу пам'яті (100Н), в якій повинна бути розташована наступна за нею команда прикладної програми.
Псевдокомандою EQU можна будь-якому символічному імені, використовуваному в програмі, поставити у відповідність певний операнд.
Наприклад, запис
TMR0 EQU 01h приводить до того, що в процесі асемблювання усюди, де зустрінеться символічне ім'я TMR0, воно буде замінено числом 1.
Псевдокомандою END програміст дає асемблеру вказівку про закінчення трансляції.
В результаті трансляції повинна бути отримана карта пам'яті програм, де кожному елементу пам'яті поставлений у відповідність код, що зберігається в ньому.
Нижче приведений фрагмент робочої програми, що містить операнди з різним способом завдання і псевдокоманду END:
| MOVLW |
B'01010101' |
; Завантажити константу ;01010101 ; у регістр W |
| MOVLW |
DATAPORT |
; Записати вміст регістра ; W в регістр DATAPORT ; (визначений раніше як порт ; В) |
| GOTO |
$ |
; Безкінцевий цикл (вічний ; цикл для перевірки програми в ; динамічному режимі). Вихід ; тільки по перериванню. |
| END |
; Кінець трансляції і закінчення ; програми |
3.2 Структура робочої програми
Робоча програма для ОMK PIC 16/18 складається з трьох основних секцій:
1.Секція заголовка;
2.Робоча секція; 3.Секція закінчення.
У секції заголовка визначаються логічні імена для всіх використовуємих в програмі ресурсів: портів, бітових і байтових змінних, регістрів. Це початкова частина початкової програми до рядка з виразом ORG 0 (для PIC 16F877). Для інших типів мікроконтролерів сімейств PIC
16/18 адреса початку наступної секції (сегменту) робочої програми може бути іншою (див. організацію пам'яті програм конкретного типу ОМК).
Робоча секція програми починається з виразу ORG 0 (для PIC16F877), який є покажчиком для Асемблера про те, що код наступний за цим виразом починається з нульової адреси пам'яті програм. Приклад цього фрагмента робочої програми для PIC 16F877 приведений нижче:
; Робоча секція
;
; Початок виконуємої частини програми
| ORG |
; Наступна команда буде ; розташована в пам‘яті ; програм за адресою 0h |
|
| GOTO |
BEGIN |
; Перша команда, яка буде ; виконана процесором |
| ORG |
100h |
; Наступна команда буде ; розташована за адресою 100h |
BEGIN
; Иніціалізація мікроконтролера
; (Конфігурація портів введення/виводу, TMR0, WDT и т.п.)
;
Секція закінчення в простому випадку містить тільки псевдо-команду END.
3.3 Приклад написання початкового тексту програми
Нижче приведений приклад написання початкового тексту робочої програми для ОМК PIC 16С877 (16F877):
; Приклад початкового тексту програми (Назва програми)
;
LIST P=16C877
;
;Секція заголовка
;
;Опис операційних регістрів
TMR0 EQU 01h ; Імені TMR0 привласнено
; значення 01h ( де, 01h- ; адреса регістра TMRO в
; памяти даних ПД )
PC EQU 02h
STATUS EQU 03h
FSR EQU 04h
; Опис регістрів введення/виводу
CNTRLPORT EQU 05h ; Імені CNTRLPORT
; привласнено значення 05h
DATAPORT EQU 06h
; Опис комірок ОЗП
SCRATCH EQU 0Ch ; Імені SCRATCH
;привласнено значення 0Сh
DIGIT EQU D
; Опис бітів регістра STATUS
C EQU 0h ; Ідентифікатору (імені)
; С привласнено значення 0
; ( 0-й розряд регістра
; STATUS )
DC EQU 1h
Z EQU 2h
PD EQU 3h
TO EQU 4h
RP EQU 5h
; Опис керуючих регістрів
TRISA EQU 85h ; Імені TRISA привласнено
; значення 85h ( де, 85h – ; адреса регістра TRISA в
; ПД )
TRISB EQU 86h
; Опис слів ініціалізації (констант) для портів введення/виводу
; що визначають призначення кожного розряду регістрів портів
| INITA |
EQU |
B'00000000' |
; Імені INITA привласнено ; значення двійкового коду ; 00000000, згідно ; якому всі розряди ; порта А призначені ; виходами |
| INITB |
EQU |
B'00000000' |
|
| ; |
|||
| ; Робоча секція |
|||
; Початок виконуємої частини робочої програми
ORG 0
GOTO BEGIN
| ORG 100h ; Ініціалізація мікроконтролера |
|
| MOVLW INITA |
|
| MOVLF TRISA |
|
| MOVLW INITB |
|
| MOVWF TRISB ; ; Виведення дискретних сигналів |
|
| MOVLW B'01010101' |
;Завантажити01010101 у W |
| MOVWF DATAPORT |
; Записати W у порт В |
| GOTO $ ; |
; Нескінченний цикл |
; Секція закінчення
;
END
Спробуємо на підставі приведеного прикладу пояснити деякі основні особливості і правила написання початкових текстів програм для ОМК PIC на мові Асемблера. Для цього аналізуватимемо і обговорюватимемо рядок за рядком дану програму.
По-перше, всі рядки, що починаються із знаку ";", сприймаються асемблером як коментарі. Перейдемо до виразу TMR0. Ми задали асемблеру, що кожного разу, коли зустрінеться слово TMR0, необхідно підставити значення 01h (01 шістнадцяткове). Слово "EQU" означає рівність. Таким чином, ми привласнили TMR0 значення 1h. Ви можете використовувати 01h кожного разу, коли хочете адресувати регістр TMR0, але це значно складніше відладжувати, оскільки Ви повинні будете весь час пам'ятати, що 01h означає TMR0. У Вас можуть існувати і дані, рівні 01h. Використання символьних імен усуває двозначність і дозволяє полегшити читання початкового тексту. Ви також можете бачити вирази для визначення регістрів РС, STATUS і FSR. Ім'я РС відповідає регістру з адресою 02h, ім'я STATUS відповідає регістру з адресою 03h, ім'я FSR - регістру з адресою 04h і так далі. Ми також задали імена для портів введення/виводу, CNTRLPORT (05h) і DATAPORT (06h).
Осередки ОЗП також можуть мати імена. Ми вибрали імена "SCRATCH" для осередку з адресою 0Ch і "DIGIT" для осередку з адресою 0Dh.
Якщо Ви прочитаєте до кінця цей початковий текст програми, то побачите, що ми ніде не використовуємо РС безпосередньо, хоча це ім'я і визначено. У цьому немає помилки - можна визначати імена і потім не використовувати їх, хоча, звичайно, не можна використовувати ім'я, якщо воно не було заздалегідь визначене. Hе дуже піклуйтесь про це - робота асемблера якраз і полягає в перевірці тексту на дотримання всіх правил, і Ви отримаєте повідомлення про помилки, якщо щось не відповідатиме.
Ви можете не тільки іменувати регістри, але і окремі біти усередині регістрів. Зверніть увагу на секцію, задаючу регістр STATUS. Символу С привласнено значення 0h, оскільки C або CARRY, це нульовий біт слова стану STATUS. Кожного разу, коли ми повинні будемо перевірити біт CARRY (біт 0), ми користуватимемося заздалегідь певним символом "C". Кожного разу, коли ми захочемо звернутися до біта 2, або біту ZERO, ми використовуватимемо символ "Z" замість 02h. Ви можете визначити повну структуру бітів регістра, навіть якщо Ви потім не все з них використовуватимете.
Тепер нам стало ясно, як описуються регістри, і ми можемо перейти до виконуваного коду. Перед тим, як почати виконуваний код, ми повинні задати вираз ORG 0. Це покажчик для Асемблера, що код, наступний за цим виразом, починається з нульової адреси ППЗП. Вираз "ORG" використовується для розміщення сегментів коду по різних адресах в межах розмірів ППЗП. Ще один вираз ORG знаходиться перед міткою BEGIN, що має адресу 100h, як задано виразом ORG 100h. Виконуваний код повинен закінчуватися директивою END, що означає, що за цією директивою відсутні виконувані команди.
При включенні живлення PIC16F877 переходить на адресу 0000h.
Перша інструкція, яка буде виконана процесором, це команда GOTO BEGIN, яка передасть управління на адресу 100h і подальша робота продовжиться з цієї адреси. BEGIN - це вибиране користувачем ім'я мітки (мітки завжди повинні починатися з першої позиції рядка), яке Асемблер використовує для адресного посилання. В процесі роботи Асемблер визначає розташування мітки BEGIN і запам'ятовує, що якщо це ім'я буде зустрінуте ще раз, замість нього буде підставлена адреса мітки. Команди CALL і GOTO використовують мітки для посилань в початковому тексті. Тепер подивимося на наступні команди, що виконуються процесором. Команда MOVLW INITA завантажує в робочий регістр W значення, привласнене імені INITA. Це значення задане в заголовку і рівне B'00000000', тобто 00h. Символи B' означають, що дані задані в двійковому форматі. Можна було б написати в цьому ж місці 0 (десятковий) або 0h (шістнадцятковий) і отримати той же самий результат. Двійкове уявлення зручніше використовувати в тих випадках, коли передбачається операція з бітами в регістрі.
Наступна команда MOVWF TRISA завантажує значення з робочого регістра W в регістр управління конфігурацією порту A TRISA. Завдання 0 в розряді цього регістра визначає, що відповідний розряд порту A є виходом. У нашому випадку всі розряди порту A встановлюються виходами. Якби ми захотіли, наприклад, встановити молодший розряд порту A як вхід, ми б задали в секції описи регістрів значення INITA рівним B'00000001'. Якщо по ходу роботи програми нам потрібно буде перевизначати призначення окремих розрядів портів, наприклад, при двонаправленій передачі, то найзручніше задати всі необхідні слова конфігурації в секції опису, як ми зробили для INITA і INITB.
Наступні дві команди MOVLW INITB і MOVWF TRISB визначають конфігурацію порту B. Ми могли б зекономити і не писати команду MOVLW INITB, оскільки в нашому випадку INITB також рівне 0h. Проте ми не стали цього робити, оскільки це може привести до важко виявлених помилок, якщо згодом нам потрібно буде змінити призначення якогонебудь одного розряду. Замість того, щоб змінити тільки один розряд в одному порту, зміняться два розряди з однаковим номером в двох портах. Тому поки програма не закінчена, таку економію робити не бажано, хоча в кінці, на етапі оптимізації коду, такі повтори можна видаляти.
Ось тепер по суті ми тільки підійшли до аналізу основної частини початкового тексту робочої програми – "Виведення дискретних сигналів".
У цій частині програми ми використовували всього три команди:
MOVLW k MOVWF f GOTO k.
Команда MOVLW завантажує байтовий літерал або константу в робочий регістр W. Наступна команда MOVWF пересилає байт з робочого регістра W в заданий регістр f. Команда GOTO передає управління на адресу k. Таким чином, ця частина програми записує в робочий регістр W значення 01010101 і потім видає його вміст на порт B.
Директива асемблера "$" означає поточне значення програмного лічильника (РС). Тому команда GOTO $ означає перехід туди, де ми в даний момент знаходимося. Такий цикл нескінченний, оскільки не існує способу (окрім переривання) вийти з нього. Команда GOTO $ часто застосовується для зупинки коду при відладці.
Якби до всіх виводів порту В були, наприклад, підключені світлодіоди, то після запуску розглянутої програми ми побачили б свічення тільки чотирьох з них.
3.4 Перетворення початкового тексту робочої програми
у об'єктний модуль
Написанням тексту програми закінчується перший етап розробки прикладного програмного забезпечення - "від постановки завдання до початкової програми" і починається наступний - "від початкової програми до об'єктного модуля".
Для простих програм об'єктний код може бути отриманий уручну (ручна трансляція). Проте для больш складних програм потрібні спеціальні засоби автоматизації підготовки програм. Зазвичай такі засоби використовують великі об'єми пам'яті і широкий набір периферійних пристроїв, через що вони не можуть бути резидентними, а використовуються тільки в кросс-режимі на універсальних ЕОМ.
У мінімальний склад програмного забезпечення кросс-засобів входять:
- системна програма для введення початкового тексту прикладної програми, його редагування і запису на зовнішній носій інформації - так званий редактор текстів(EDIT);
- програма-транслятор, що забезпечує перетворення початкового тексту прикладної програми в об'єктний модуль (АSM, PASM, MPASM).
Могутніші кросс-засоби припускають наявність редактора зовнішніх зв'язків (LINK), що дозволяє включати в програму модулі, розроблені незалежно один від одного, і програму, що забезпечує настроювання переміщуваних програмних модулів на абсолютні адреси (LOCATE).
Для трансляції початкового тексту програми необхідно викликати танслятор, вказавши йому файл з початковим текстом, місце розміщення об'єктного коду, а також умови формування і виведення лістингу. Всі виявлені в процесі трансляції помилки виправляються в початковому тексті прикладної програми (це відноситься і до помилок, виявлених на етапі відладки). Для цього необхідно знов викликати редактор тексту і здійснити редагування початкового тексту програми, а потім виконати повторну трансляцію.
Якщо початковий текст прикладної програми не мав зовнішніх посилань і містив директиву ORG, то після успішного завершення трансляції етап розробки програмного забезпечення "від початкової програми до об'єктного модуля" можна вважати закінченим.
Для ОМК сімейств PIC 16/18 також існує інтегроване середовище для розробки робочих програм MPLAB IDE 6.50, у складі якої є всі перераховані вище засоби. Існують і окремі програми-транслятори з Асемблера PASM і MPASM.
Розглянемо трохи докладніше процес перетворення початкового тексту робочої програми для OMK PIC 16/18 з використанням транслятора MPASМ.
3.5 Використання програми-транслятора MPASM
3.5.1. Запуск транслятора
Для того, щоб запустити транслятор необхідно вибрати курсором MPASM.EXE і натиснути "Введення". На екрані з'явиться меню, за допомогою першої опції якого можна вибрати файл з початковим текстом ("власне ім'я".asm), якщо він існує в поточному каталозі. Для цього необхідно вибрати перший пункт і натиснути "Введення", у вікні, що з'явилося, вибрати файл і знову натиснути "Введення".
Друга опція дозволяє вибрати тип процесора. Натискаючи введенням на цей пункт, можна перебирати типи процесорів, поки не буде знайдений потрібний. За допомогою решти пунктів можна вибрати: створювати обьектный файл чи ні, формат НЕХ-файлу і так далі.
Для трансляції досить використовувати перші дві опції, остальні за умовчанням. Для запуску транслятора необхідно натиснути F10.
Аналогічні дії можна провести, написавши в командному рядку DOS наступну команду:
<MPASM ІМ'Я.ASM / P16F**>
і натиснувши "Введення". Тоді трансляція проведеться без входження в меню MPASM.
2.5.2. Результати трансляції
Результатом роботи транслятора є файли з початковим ім'ям і розширеннями НЕХ, OBJ, LST,ERR.
Файл з розширенням OBJ містить інформацію про значення змінних, описаних в секції заголовка початкового тексту програми, і є перемістимим об'єктним модулем.
Файл лістингу з розширенням LST містить інформацію про описані змінні, про адресацію програми і використовується на стадії відладки відтрансльованої програми за допомогою симулятора.
Файл з розширенням НЕХ містить шістнадцяткові коди команд процесора (мікроконтролера), які використовуються для запису програми в пам'ять програм мікроконтролера за допомогою програматора.
У файлі з розширенням ERR містяться відомості про допущені помилки і некоректні записи, зроблені в програмі. Файл має наступний формат:
<ключове слово (warning, message, error)> [<номер помилки>]<шлях до файлу> <номер рядка> <коментар до помилки>
Ключові слова Warning і Message містять рекомендації і повідомлення, але не є помилками і не підлягають обов'язковому виправленню.
2.5.3 Особливості використання транслятора MPASM
При використанні транслятора MPASM з версіями до 3.11 необхідно враховувати те, що ці програми мають друкарські помилки в командах операцій над регістрами виду MOVF reg. Ці транслятори за умовчанням проводять підстановку, що позначає перенесення результату операції в регістр W.
Окрім цього, ранні версії транслятора MPASM некоректно працюють з другою сторінкою пам'яті ОМК PIC 16F8**. Тому, для коректної роботи програм необхідно безпосередньо самому програмістові перемикати сторінки шляхом установки або скидання 6-го біта в регістрі OPTION.
3.6 Відладка робочих програм
Після отримання об‘єктного коду робочої програми неминуче наступає етап відладки, тобто встановлення факту її працездатності, а також виявлення (локалізації) і усунення помилок. Без цього етапу розробки ніяке програмне забезпечення взагалі не має права на існування. Відладка робочих програм є окремим складним завданням, яке майже не піддається формалізації і вимагає для свого виконання високого професіоналізму і глибоких знань розробника.
Зазвичай відладка робочої програми здійснюється у декілька етапів. Прості (синтаксичні) помилки виявляються вже на етапі трансляції. Далі необхідно виконати:
![]() автономну відладку кожної процедури в статичному режимі, що дозволяє перевірити правильність обчислень, що проводяться, правильність послідовності переходів усередині процедури (відсутність
автономну відладку кожної процедури в статичному режимі, що дозволяє перевірити правильність обчислень, що проводяться, правильність послідовності переходів усередині процедури (відсутність
"зациклення") і т.п.;
![]() комплексну відладку робочої програми в статичному режимі, що дозволяє перевірити правильність алгоритму управління (по послідовності формування керуючих дій);
комплексну відладку робочої програми в статичному режимі, що дозволяє перевірити правильність алгоритму управління (по послідовності формування керуючих дій);
![]() комплексну відладку в динамічному режимі без підключення об‘єкта для визначення реального часу виконання програми і її окремих фрагментів.
комплексну відладку в динамічному режимі без підключення об‘єкта для визначення реального часу виконання програми і її окремих фрагментів.
Слід мати на увазі, що автономна відладка окремих модулів настільки простіша і ефективніша за відладку всієї робочої програми, що переходити до етапу комплексної відладки доцільно тільки після вичерпання всіх засобів автономної відладки.
Вищеперелічені етапи відладки здійснюються зазвичай з використанням крос-систем (наприклад, MPLAB IDE для OMK PIC).
До складу крос-систем входять програми-відладчики (узагальнене ім'я - DEBUG), що інтерпретують (що моделюють) виконання програм, написаних для МК. Такі програмні імітатори дозволяють ефективно відладжувати обчислювальні процедури, а також алгоритм функціонування контроллера.
Розробникові наданий доступ до будь-якого ресурсу МК, є можливість покомандного і пофрагментного виконання програми і останову по умові, а також підрахунку числа тактів виконання тих або інших фрагментів програми, ініціювання переривань, дизасемблювання вмісту пам'яті програм і т.п.
Кросс-відладчики дозволяють промоделювати практично всі можливі варіанти роботи програми і тим самим переконатися в її працездатності. На цьому ж етапі можлива перевірка працездатності програми при нештатних ситуаціях в умовах надходження некоректних вхідних дій (для застосувань з півищенними вимогами по безпеці).
Головним недоліком крос-систем є неможливість прогону програми в реальному масштабі часу, тобто з швидкістю, близькою до швидкості виконання програми в самому МК, а також неможливість комплексування апаратурних і програмних засобів системи, що розробляється. Через ці причини достовірність прикладних програм, відладжених в кросс-режимі, недостатньо велика.
Якнайповніша і комплексна відладка прикладного прогаммного забезпечення спільно з апаратурними засобами контроллера може бути проведена на інструментальному відладчику PICDEM 2 PLUS. Під управлінням МІКРОЕОМ PICDEM 2 PLUS дозволяє проганяти прикладну програму або її окремі фрагменти в реальному темпі, зупиняти виконання програм по багатьом ознакам, робити трасування зовнішніх сигналів МК і системи під час виконання програм. Достовірність програмного забезпечення, відладженого на інструментальній МІКРОЕОМ за допомогою PICDEM 2 PLUS , висока хоч і не рівна одиниці.
У будь-якому випадку для доведення прикладного програмного забезпечення контроллера необхідні комплексні і всесторонні випробування розробленої системи в реальному оточенні і у всіляких режимах.
4 MPLAB IDE
MPLAB IDE - безкоштовне інтегроване середовище розробки для мікроконтролерів PICmicro фірми Microchip Technology Incorporated. MPLAB IDE дозволяє писати, відладжувати і оптимізувати текст програми. MPLAB IDE включає редактор тексту, симулятор і менеджер проектів, підтримує роботу емуляторів (MPLAB-ICE, PICMASTER) і програматорів (PICSTART plus, PRO MATE) фірми Microchip і інших налагоджувальних засобів фірми Microchip і третіх виробників.
Інструментальні засоби, що легко настроюються, тематична допомога, «випадні» меню і «призначення гарячих» клавіш в MPLAB IDE дозволяють Вам:
• отримати код програми;
• спостерігати виконання програми за допомогою симулятора, або в реальному часі, використовуючи емулятор (потрібна апаратна частина);
• визначати час виконання програми;
• проглядати поточне значення змінних і спеціальних регістрів; • працювати з програматорами PICSTAR і PRO MATE II; • використовувати систему допомоги по MPLAB IDE.
MPLAB IDE дозволяє Вам створювати початковий текст програми в повнофункціональному текстовому редакторові, легко виконати виправлення помилок за допомогою вікна результатів компіляції, в якому указуються виниклі помилки і попередження.
Використовуючи менеджер проектів можна вказати початкові файли програми, об'єктні файли, бібліотеки і файли сценарію.
MPLAB IDE забезпечує різноманітні засоби симуляції і емуляції виконуваного коду для виявлення логічних помилок. Ось їх основні особливості:
• велика кількість сервісних вікон, щоб контролювати значення регістрів пам'яті даних і виконання інструкцій мікроконтролера;
• вікна початкового коду програми, лістингу програми, коду програми - дозволяють оцінити якість компіляції;
• покрокове виконання програми, система точок зупинки, трасування, призначена для швидкої і зручної відладки вашої програми.
4.1 Засоби розробки MPLAB IDE
MPLAB IDE складається з декількох модулів, що забезпечують єдине середовище розробки.
Менеджер проекту MPLAB
Використовується для створення і роботи з файлами, що відносяться до проекту. Дозволяє одним клацанням «миші» виконати компіляцію початкового тексту, включити симулятор або внутрішньосхемний емулятор і т.д.
Редактор MPLAB
Призначений для написання і редагування початкового тексту програми, шаблонів і файлів сценарію лінкера.
Відладчик MPLAB /CD Недорогий внутрішньосхемний відладчик для мікро контролерів сімейства PIC16F87X. MPLAB-SIM симулятор
Програмний симулятор моделює виконання програми в мікроконтролері з урахуванням стану портів введення/виводу. MPLAB ICE емулятор
Емулює роботу мікроконтролера в масштабі реального часу безпосередньо в пристрої користувача.
MPASM ассемблер/MPLINK линкер/MPLIB редактор бібліотек
MPASM компілює початковий текст програми. MPLINK створює завершальний код програми, зв'язуючи різні модулі отримані з MPASM, MPLAB-C17, MPLAB-C18. MPLIB управляє бібліотеками.
MPLAB-CXX компілятори
MPLAB-C17 і MPLAB-C18 виконують компіляцію тексту програми написаному на мові ANSI С. Складні проекти можуть складатися із частин написаних на мові С і Асемблера.
Програматори PRO MATE і PICSTARTplus
Працюють під управлінням MPLAB IDE і призначені для
програмування мікроконтролерів кодом програми, отриманої в результаті компіляції початкових файлів. Програматор PRO MATE може працювати самостійно, без використання MPLAB IDE.
Емулятори MPLAB-ICE, PICMASTER-CE і PICMASTER
Застосовуються для моделювання роботи мікроконтролера в пристрої користувача в масштабі реального часу.
4.2 Створення нового проекту
Для роботи вибираємо контролер PIC16F877. Обмежимося стандартною програмою типу «моргнути світлодіодиком».
Запустіть MPLAB IDE будь-яким зручним для Вас способом. Створіть на жорсткому диску папку, в якій зберігатиметься Ваша робота. У нашому випадку створимо папку C:\work\led Скористаємося помічником створення проектів. Вибираємо Project\Project Wizard. У першому віконці просто клацаємо «Далі».
У наступному вибираємо мікроконтролер. Як ми домовилися, це буде PIC16F877. Натискаєм «Далі».
На наступному листі пропонується вибрати мову розробки.
У рядку «Active Toolsuite» вибираємо «Microchip MPASM Toolsuite»
Нижче вказаний зміст даного програмного продукту і його розташування.
Натискаємо «Далі»
На наступному листі необхідно вказати назву проекту і місцерозташування папки, в якій зберігатиметься код програми.
Указуємо назву «led» і шлях «c:\work\led»
Для вказівки шляху можна скористатися кнопкою «Browse.»
На наступній сторінці пропонується приєднати існуючі файли до проекту. Оскільки ми тільки починаємо, то сміливо тиснемо «Далі» На цьому створення проекту завершується.
Ми бачимо підсумкові дані нашого проекту. Натискаємо «Готово»
4.3 Створення початкового файлу
Для написання програми нам необхідний файл.
Створимо його!
Натискаємо піктограму у вигляді чистого листа.
У нас з'явився новий порожній файл.
Збережемо його в папці c:\work\led «File/Save as.» Назва – led.asm Додамо цей файл до проекту.
Для цього клацаємо правою кнопочкою на «Source Files» і виберемо «Add
Files.»
Відкриється вікно, в якому необхідно вибрати «main» Після цього файл led.asm буде доданий до проекту.
Для того, щоб компілятор розумів символьні імена, такі як PORTB,
STATUS та інші необхідно підключити файл header. Це робиться шляхом додавання рядка #include P16F877.INC На цьому підготовку до написання програми ми закінчили.
Само написання програми – процес творчий і неординарний, ми не на цьому зупинятимемося, а візьмемо готову програму.
;================ Початок LED.ASM ================
;Файл: LED.ASM
list p=16F877 ;Використуємий процесор.
#include p16f877.inc ;Заголовочный файл для
;мікроконтролера PIC16F877. ;Файл розташований в директорії ;встановленої MPLAB-IDE. org 0x0000 ;Вектор скидання процесора, ;після скидання програма починає ;виконуватися звідси.
nop ;Цей nop життєво необхідний для ;коректної роботи MPLAB-ICD clrf INTCON ;Перестраховуємося, забороняємо всі ;переривання.
clrf PCLATH ;Перестраховуємося, вибираємо Bank 0 ;Пам'яті Програм.
goto Start ;Обхід вектора переривання і блоку
;підпрограм.
org 0x0004 ;Вектор переривання.
;********** Початок обробника переривань **********
;У цій простій програмі не використовуються переривання
;********** Кінець обробника переривань************
;***************** Блок підпрограм ****************
;У цій простій програмі немає підпрограм
;************* Кінець блоку підпрограм *************
Start ;Тіло програми починається тут.
;********** Початок Ініціалізації процесора ********
clrf PORTТВ ;Усі виводи PORTВ переводимо в '0'
movlw b'00100000' ; movwf STATUS ;Вибираемо Bank 1 RAM(адреси 80h - FFh)
movlw b'00000000' ; movwf TRISB ;Усі лінії PORTB перемикаємо на вихід clrf STATUS ;Повертаємося у Bank 0 RAM(адреси 00h - 7Fh)
;********** Кінець Ініціалізації процесора *********
Loop bsf PORTB,2 ;Засвітимо світлодіод nop ;Тягнемо час... nop ;... nop ;...
bcf PORTB,2 ;Тушимо світлодіод nop ;Тягнемо час... nop ;... nop ;... goto Loop ;Нескінченній цикл.
END ;Кінець початкового коду програми
;============= Кінець LED.ASM =====================
4.4 Компіляція початкового файлу
Компіляція початкового файлу може бути виконана декількома способами. Описаний тут метод використовує пункт меню Project > Build . Після вибору вказаного пункту меню початковий текст програми зберігається і запускається програма MPASM. Як тільки компіляція буде завершена, на екрані з'явиться вікно результатів роботи MPASM (Рисунок 4.1).
Рисунок 4.1 - Вікно результатів роботи MPASM
Угорі перший рядок указує чи є помилки. У нашому випадку вони є, тому з'являється наступне повідомлення:
- ![]() Errors Found і червона лінія 100%; Кількість помилок - Errors: 1;
Errors Found і червона лінія 100%; Кількість помилок - Errors: 1;
Кількість описок - Warnings:
- REPORTED: 0;
- SUPPRESSED: 0;
![]() Кількість повідомлень – Messages:
Кількість повідомлень – Messages:
- REPORTED: 1;
- SUPPRESSED: 0;
![]() Усього рядків – (LINES ASSEMBLED): 432.
Усього рядків – (LINES ASSEMBLED): 432.
В вікні результатів компіляції з‘явиться текст:
―Clean: Deleting intermediary and output files.
Clean: Deleted file "C:\work\led.HEX".
Clean: Done.
Executing: "C:\Program Files\MPLAB IDE\MCHIP_Tools\Mpasmwin.exe" led.asm /e+ /l+ /x- /p16F877 /c+
Error[113] C:\work\LED.ASM 35 : Symbol not previously defined (PORTTB)
Message[302] C:\work\LED.ASM 41 : Register in operand not in bank 0. Ensure that bank bits are correct.
Halting build on first failed translation as user preferences indicate.
BUILD FAILED: Sun Feb 04 12:49:37 2007‖
В програмі навмисне була допущена помилка ―PORTTB‖ (Error[113]
C:\work\LED.ASM 35 : Symbol not previously defined (PORTTB)). Повідомлення ―Message[302] C:\work\LED.ASM 41 : Register in operand not in bank 0. Ensure that bank bits are correct.‖ нагадує, що регістр TRISB знаходиться не в нульовому банку і попередньо необхідно встановити перший банк.
Подвійне клацання "мишею" на повідомленні про помилку перенесе курсор на рядок в початковому тексті, де була зроблена помилка. Після виправлення всіх помилок і повторній компіляції на екрані з'явиться вікно результатів з повідомленням про успішну компіляцію (рисунок 4.2) з зеленою лінією.
![]() 0
0
Рисунок 4.2 - Вікно з повідомленням про успішну компіляцію
В вікні ―Output‖ останнє повідомлення буде ―BUILD SUCCEEDED‖. Тепер можна використовувати симулятор для перевірки роботи програми.
Примітка. При старті компіляції відкриті початкові файли зберігаються на диску.
4.5 Відладка програми
Проте треба переконатися, що програма працює. Як це зробити?
Для цього в MPLAB IDE передбачений процес відладки.
Для його активації необхідно вибрати ―Debugger/Select Tool/MPLAB SIM‖. Після цього на панелі інструментів з'явиться така група кнопок:
![]()
Призначення кнопок наступне (зліва на право):
![]()
![]() RUN - Запуск програми. Програма працює з великою швидкістю, не відбувається оновлення вікон Watch. Якщо використовується MPLAB ICD2, то дана кнопка запускає програму в реальному часі. Halt - Пауза.
RUN - Запуск програми. Програма працює з великою швидкістю, не відбувається оновлення вікон Watch. Якщо використовується MPLAB ICD2, то дана кнопка запускає програму в реальному часі. Halt - Пауза.
Animate - Анімація. Програма працює швидко, але в покроковому режимі. Швидкість роботи нижча, ніж в першому випадку, проте відбувається новлення всіх вікон.
![]() Step Into – Крок. Програма виконується в покроковому режимі. Виконується КОЖНА команда. Гаряча клавіша F7.
Step Into – Крок. Програма виконується в покроковому режимі. Виконується КОЖНА команда. Гаряча клавіша F7.
![]() Step Over – Крок без підпрограми. Якщо наступною командою є виклик підпрограми, то Ви отримаєте результат роботи цієї підпрограми, а сам процес робота підпрограми залишиться «за кадром». Тобто Ви не потрапите «всередину» підпрограми.
Step Over – Крок без підпрограми. Якщо наступною командою є виклик підпрограми, то Ви отримаєте результат роботи цієї підпрограми, а сам процес робота підпрограми залишиться «за кадром». Тобто Ви не потрапите «всередину» підпрограми.
![]() Step Out – Вихід з підпрограми. Ви вийдете з підпрограми, в якій знаходитеся в даний момент. Ви отримаєте дані роботи підпрограми.
Step Out – Вихід з підпрограми. Ви вийдете з підпрограми, в якій знаходитеся в даний момент. Ви отримаєте дані роботи підпрограми. ![]() Reset – Скидання мікроконтролера.
Reset – Скидання мікроконтролера.
Для зручності користувача передбачено меню View. З його допомогою Ви можете спостерігати:
1. File Registers – регістри ОЗП мікроконтролера.
2. Program Memory – пам'ять програм мікроконтролера.
3. EEPROM – пам'ять ПЗП мікроконтролера (EEPROM).
4. Special Function Registers – регістри спеціального призначення.
5. Watch – спеціальне вікно, в якому можна проглядати будь-які дані, розташовані в ОЗП мікроконтролера. На цьому вікні ми зупинимося трохи нижче.
6. Hardware Stack – стек мікроконтролера. У даному вікні Ви побачите адреси повернення з підпрограм і переривань.
7. Disassembly Listing – Код програми на мові Асемблер. Вельми корисна функція для людей, що пишуть на мовах високого рівня.
Отже, приступимо до відладки.
Нас, перш за все, цікавлять такі регістри: WREG, PORTB, TRISB.
Додамо їх у вікно WATCH для спостереження за їх станом.
Для цього необхідно:
1. Відкрити вікно Watch – View/Watch
2. У ЛІВОМУ випадному списку вибрати необхідний Вам регістр і натиснути кнопку Add SFR
3. Якщо Ви хочете додати свій власний символ, наприклад регістр counter, то Вам необхідно вибрати в ПРАВОМУ випадному списку і натиснути кнопку ―Add Symbol‖ .
4. Зручнішим і зрозумілішим способом поміщення регістра в watch є «Drag and Drop», тобто просто виділяємо регістр і перетягуємо його у вікно watch.
5. Далі необхідно змінити параметри даних у вікні Watch, для цього необхідно виконати такі дії:
a. Лівою кнопкою мишки виділити регістр, що цікавить Вас.
b. Натиснути праву кнопку миші і вибрати «Properties»
На екрані з'явиться вікно «властивості». В результаті цих дій ми повинні отримати всі регістри, що цікавлять нас при відладці програми. Відкомпілюємо наш проект, для цього необхідно натиснути <F10> Після компіляції лічильник команд встановиться в 0x00.
Натискаємо <F7> і стежимо за станом мікроконтролера у вікні watch.
Вам може захотітися дізнатися інтервали між якими-небудь подіями. Для цього в середовищі розробки MPLAB IDE існує спеціальне вікно – stopwatch.
Викликати це вікно можна так:
Debugger/Stopwatch
Працювати з даним вікном дуже просто – обнулили, запустили, подивилися. Даним інструментом зручно користуватися у поєднанні з іншою функцією MPLAB IDE – точками останову (breakpoints). Точка останову, це крапка в якій відбудеться останов процесу симуляції. Після перевірки працездатності програми необхідно якимсь чином «запихнути» цю програму в мікроконтролер.
Дану роботу виконує пристрій під назвою Програматор .
Програматори бувають фірмові , типу фірмових і саморобні .
Фірмові програматори – це програматори, що випускаються фірмою Microchip.
Вони повністю відповідає специфікації програмування всіх мікроконтролерів, що випускаються. Тривалість, скважність і інші характеристики програмування контролюються процесором програматора, а не комп'ютером. Тобто програматор буде однаково добре працювати на комп'ютерах різної продуктивності.
Фірмові програматори, які випускає фірма Microchip:
Програматор розробника PICSTART Plus
Цей програматор, що підтримує всі мікроконтролери фірми Microchip, оснащений панелькою програмування з нульовим зусиллям, що дозволяє просто встановлювати і витягувати мікроконтролер з програматора. Інтерфейс програматора інтегрований в середу розробки MPLAB IDE, що дозволяє програмувати контроллер без яких-небудь додаткових програм.
Інтерфейс зв'язку з комп'ютером – RS232.
Внутрішньосхемний відладчик MPLAB ICD2.
Цей унікальний пристрій може стати в нагоді розробникові не тільки для відладки програм, але і для «банального» програмування мікроконтролерів. Проте його можливості як програматор не такі великі. Він не підтримує мікроконтролери серії PIC17, підтримує обмежену кількість мікроконтролерів PIC16. Проте, даний пристрій дозволяє програмувати всі мікроконтролери серії PIC18, микроконтроллеры серії PIC12 з flash пам'яттю програм, а також підтримує все нові мікроконтролери серії PIC16, наприклад PIC16F628A, PIC16F648A, PIC16F818, PIC16F819, PIC16F877 і т.д.
Інтерфейс даного налагоджувального засобу також інтегрований в середу розробки MPLAB IDE версії 6.хх і вище. Зв'язок з комп'ютером – USB, RS232.
Для 8 і 14 вивідних мікроконтролерів Flash фірма Microchip випустила недорогий модуль PICkit1 FLASH STARTER KIT . Він є платою з мікроконтролером, що управляє, і панелькою для 8 (14) вивідних мікроконтролерів. Також є 8 світлодіодів, потенціометр і кнопочка. Для «продвинутих» користувачів є майданчик для макетування і друкарська плата для збору модуля інтерфейсу RS232.
Інтерфейс даного налагоджувального засобу інтегрований в середу розробки MPLAB IDE версії 6.хх і вище, але є і окрема програмна оболонка, що дозволяє проводити програмування, читання, стирання, верифікацію без участі MPLAB IDE. Також дана оболонка дозволяє відновлювати калібрувальні дані вбудованого тактового генератора.
Для промислового використання фірма Microchip випускає спеціалізовані програматори PRO MATE II і PM3 . Вони призначені для серійного виробництва і розраховані на об'єми до 10 тис. мікроконтролерів в місяць.
Існують менш дорогі програматори. Назвемо їх «третіх фірм ». Поза сумнівом, їх головний плюс - менша вартість. Вони випускаються не фірмою Microchip, а сторонніми розробниками. Випускаються вони серійно і їх не можна називати «кустарними». Часто, в них використовуються передові технології. Багато хто з них володіє хорошими показниками, і, можливо, нічим не гірше фірмових. Проте ніхто не дає гарантії, що завтра ця фірма не розчиниться в повітрі. В цьому випадку Ви залишитеся наодинці з незрозумілою залозкою, яка програмує далеко не всі мікроконтролери, до того ж Ви втратите можливість подальшого поповнення списку програмованих мікроконтролерів.
Третій клас програматорів – саморобні .
Найпростіші з них, в буквальному розумінні цього слова, можна «зібрати на коліні», при цьому використовуючи навісний монтаж. Більш «просунуті» вимагають деяких знань в області схемотехніки. Принципові схеми даних програматорів легко можна знайти в Інтернеті. Також в Інтернеті Ви можете знайти і програми для комп'ютера, що дозволяють працювати з цими програматорами.
Найбільш популярною безкоштовною програмою для програмування мікроконтролерів фірми Microchip (і не тільки мікроконтролерів) є програма ic-prog. Сайт цієї програми www.ic-prog.com
На цьому сайті Ви знайдете не тільки дану програму, але і величезну кількість принципових схем програматорів. Найбільш прийнятним програматором є Propic II. Проте, його схему важко назвати простою. Найбільш популярною зв'язкою є програма IC-PROG + «залізо» ProPic II.
4.6 Внутрішньосхемний відладчик MPLAB ICD2
Внутрішньосхемний відладчик (дебаггер) служить для внутрішньосхемної відладки мікроконтролерів. Відладка здійснюється на штатному серійному мікроконтролері, при цьому відладжувана програма записується в штатну FLASH програмну пам'ять мікроконтролера. Для того, щоб функціонував режим внутрішньосхемної відладки, в серійні зразки мікро контролерів вбудовують спеціальний механізм – ICD (In_Circuit Debugger). Для відладки цей механізм включається, а для серійних виробів жорстко вимкнений в конфігураційному слові мікроконтролера.
Принцип роботи механізму наступний: під час роботи мікроконтролера досягши точки останову або при покроковій відладці відпрацьовується технологічне немасковане переривання і управління передається підпрограмі відладчика (вона непомітно для користувача дописується в останні елементи програмної пам'яті).
Ця підпрограма виконує функцію передачі через дебаггер в комп'ютер стан елементів пам'яті мікроконтролера, а так само змінює їх стан і перемикає режими роботи по команді з комп'ютера. В результаті частина комірок пам‘яті програм і регістрів ОЗП стає недоступною для відладжуваної програми і резервується для роботи підпрограми відладчика.
Крім цього, при відладці так само стають недоступними:
– 2 рівні стека (з 31);
– біти порту RB6 і RB7 (для програмування мікроконтролера і управлінням режимами відладки);
– виведення MCLR/Vpp (використовується для програмування) – режим Low Voltage ICSP Programming примусово вимикається.
Слід зазначити, що обмеження вносяться лише при включеному режимі відладки. Якщо ж програма дуже велика, в цьому випадку можна порекомендувати відладжувати програму частинами, а потім відключити режим відладки і повністю запрограмувати використовуваний мікроконтролер. При цьому знімаються всі обмеження, що накладаються, MPLAB_ICD2, він працює в режимі звичайного програматора.
Таким чином, за допомогою MPLAB_ICD2 можна не тільки написати програму, відладити її на демонстраційній платі або ж пристрої, що розробляється, але і використовувати ICD2 як серійного програматора (у тому числі і внутрішньосхемного). А невисока вартість дебаггера робить його вельми привабливим багатофункціональним налагоджувальним засобом.
Працює MPLAB ICD2 під управлінням безкоштовного універсального середовища розробника MPLAB IDE, яке періодично оновлюється для підтримки нових мікроконтролерів і перевидається на CD_ROM, а так само доступна на сайті www.microchip.com. Причому ICD2 працює як із старими 16_битными версіями MPLAB IDE 5.xx (підтримується робота тільки через RS_232), так і з новими 32_bit версіями MPLAB IDE 6.xx (підтримується як RS_232, так і USB).
Підтримується установка точок останову, перегляд і зміна пам'яті даних і EEPROM. Крім того, ICD2 можна використовувати як внутрішньосхемний програматор, при цьому вбудований захист від перевантажень по струму і напрузі, є діагностичні світлодіоди контролю стану.
Якщо дебаггер підключається до комп'ютера через USB, то немає необхідності використовувати додаткове джерело живлення. Зрозуміло, що для живлення відладжуваної плати він все-таки необхідний. Від відладжуваної схеми дебаггер живитися не може. У разі живлення дебаггера від зовнішнього джерела живлення (підключення через RS_232 або USB) дебаггер здатний видавати на вихід 5В 150мА, що дозволяє живити малопотужні відладжувані схеми.
4.7 Демонстраційно – відладочна плата PICDEM 2 Plus.
Дуже часто основним чинником, що впливає на успіх розробки, є швидкість виходу виробу на ринок. Тому так важливо почати розробку програми якомога раніше, ще до того, як буде розроблене і виготовлене «залізо» макетного зразка. Так само на початку проектування деколи буває неясно, який варіант реалізації того або іншого вузла буде кращім, якому інтерфейсу передачі даних віддати перевгу, і т.п. У цих і інших подібних ситуаціях на допомогу програмістові мікроконтролерних систем приходять налагоджувальні плати. Це вироби, що містять всі необхідні компоненти для роботи мікроконтролера (кола живлення, скидання, тактового генератора). Крім того, на платі містяться периферійні схеми і пристрої (ЖКІ індикатор, світлодіоди, клавіатура, годинник реального часу, периферійні мікросхеми (CAN, RS_232, I2C, SPI і т.д.)), а так само макетне поле, де при необхідності можна спаяти свою частину схеми. Іншими словами, маючи таку плату, програміст має все необхідне для початку розробки і внутрішньосхемної відладки програми.
Налагоджувальна плата PICDEM 2 Plus, демонстраційна плата від Microchip, має ICD_роз‘єм, ЖКІ індикатор, звуковий випромінювач і температурний датчик. PICDEM 2 Plus дозволяє розробникові швидко приступити до створення і відладки програм для 18-, 28- і 40 pin FLASHмікроконтролерів PICmicro.
Електрична схема плати PICDEM 2 Plus приведена в додатку Г.
4.8 Програмування контролера
При програмуванні за допомогою MPLAB ICD2 порядок дій такий:
1. Вибираємо програматор MPLAB ICD2, після чого з‘явиться меню:
![]()
Призначення кнопок наступне: програмування мікроконтролера, читання, перевірка, стирання, перевірка «чистий?», зв'язок з MPLAB ICD2.
2. З'єднання з MPLAB ICD2 відбувається автоматично, проте якщо воно не відбулося, необхідно натиснути кнопку, MPLAB ICD2.
Клацаємо мишею по першій кнопці і завантажуємо програму, що відкомпілювалася, у відладжуваний контролер. Можливо, потрібно буде на вкладці параметрів програмування поміняти значення бітів конфігурації (WDT, CP, і ін.). Після успішного запису і звірки можна кликнути по іконі скидання, при цьому на початковому тексті програми з'явиться сіра смужка покажчика поточної команди. Тепер можна запустити покрокову відладку, виконання в реальному часі, спробувати змінити вміст ОЗП/EEPROM, встановити точки останову.
Отже, Ви записали програму в контроллер, але у Вас взагалі нічого не працює або працює з перебоями? Що робити?
1. Можливо, Ви десь допустили помилку в програмному коді.
2. Можливо, Ви допустили помилку в слові конфігурації. Це найбільш типова помилка. Перевірте правильність установки виду тактового генератора (HS, XT, RC). Також, якщо Ви не передбачали використання WDT, відключите його і в слові конфігурації. Перша ознака включеного WDT – постійний перезапуск мікроконтролера.
Декілька коротких рекомендацій:
– Якщо дебаггер успішно програмує кристал, але при спробі скидання і покрокової відладки видає помилку зв'язку, перевірте відповідність типу генератора в конфігураційному слові (HS,XT, RC і тд) реально використовуваному на відладжуваній платі;
– Швидкість роботи покрокової відладки можна збільшити, обмеживши кількість оновлюваних регістрів ОЗП при відладці;
– Якщо Ваша програма невелика, є сенс змінити кінцеву адресу програмної пам'яті на вкладці опцій програмування ICD2. В цьому випадку кожного разу при зміні програми переписуватиметься не вся програмна пам'ять, а лише її частина, що зменшить час програмування мікросхеми.
5 ЛАБОРАТОРНИЙ ПРАКТИКУМ
Лабораторна робота 1
Робота з портами введення/виводу. Вивчення пакета MPLAB
1 Мета
На прикладі мікроконтролера PIC16F877 вивчити режими роботи портів введення/виводу, способи й особливості їх ініціалізації. Розглянути введення/вивід дискретних сигналів. Набути практичні уміння роботи з пакетом MPLAB, засвоїти способи задання зовнішніх впливів на виводи портів мікроконтролера.
2 Завдання по лабораторній
1) Ініціалізація портів введення/виводу.
![]() Настроїти порт A на вивід (регістр TRISA).
Настроїти порт A на вивід (регістр TRISA).
Настроїти порт B на введення (регістр TRISB).
Ввід інформації з датчиків дискретних сигналів.
Увести через порт B число M, відповідно до варіанта завдання.
Записати введене число в комірку пам'яті даних з адресою A, відповідно до варіанта завдання.
2) Вивід дискретних сигналів із мікроконтролера.
![]() Вивести молодшу тетраду введеного числа в порт A. Вивести старшу тетраду введеного числа в порт A.
Вивести молодшу тетраду введеного числа в порт A. Вивести старшу тетраду введеного числа в порт A.
Таблиця 5.1 – Варіанти завдань
| Варіант |
Номер у журналі групи |
||||||||||||||||||
| 1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
||
| 1 |
M |
121 |
80 |
54 |
112 |
98 |
100 |
34 |
135 |
211 |
240 |
167 |
99 |
56 |
63 |
73 |
23 |
231 |
35 |
| A |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
24 |
25 |
26 |
|
| 2 |
M |
151 |
57 |
213 |
89 |
81 |
190 |
119 |
78 |
83 |
67 |
34 |
144 |
132 |
139 |
21 |
141 |
252 |
84 |
| A |
29 |
30 |
31 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
22 |
23 |
|
| 3 |
M |
50 |
93 |
43 |
140 |
248 |
97 |
75 |
52 |
69 |
61 |
80 |
139 |
169 |
232 |
210 |
109 |
204 |
45 |
| A |
26 |
27 |
28 |
29 |
30 |
31 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
|
| 4 |
M |
37 |
65 |
93 |
86 |
180 |
34 |
48 |
201 |
74 |
80 |
207 |
176 |
18 |
55 |
156 |
238 |
49 |
50 |
| A |
23 |
24 |
25 |
26 |
27 |
28 |
29 |
30 |
31 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
|
Приклад програми. Виконання конфігурації розрядів 7 – 4 порту B на вивід, а розрядів 3 – 0 – на введення інформації.
…
TRISB EQU 0x86 ; адреса регістру керування портом В
| ; |
|
| movlw |
b‘00001111‘ |
| ; | | | | | | | | |
|
| ; └┴┴┴─── розряди 3-0 порту B на введення |
|
| ;└┴┴┴─────── розряди 7-4 порту B на вивод |
|
| movf |
TRISB ; конфігурування порту B |
| … |
; продовження програми |
Приклад програми. Вводу інформації із порту A та запис її в
комірку пам'яті даних з адресою 0x10.
…
PORTA EQU 0x05 ; адреса регістру порту введення/виводу MEM EQU 0x10 ; адреса регістру у пам'яті даних movf PORTA, 0 ; введення із порту A в регістр W movwf MEM ; запис в комірку пам'яті даних
… ; продовження програми
Приклад програми. Виводу молодшої тетради із комірки пам'яті
даних з адресою 0x10 в старші розряди порту B.
…
PORTB EQU 0x06 ; адреса регістру порту введення/виводу MEM EQU 0x10 ; адреса регістру у пам'яті даних swapf MEM, 0 ; обмін тетрад місцями та запис у W movwf PORTB ; вивод із регістру W у порт B
… ; продовження програми
3 Порядок виконання роботи
![]() Запуск пакета MPLAB.
Запуск пакета MPLAB.
File –> New – створення нового вікна для набору тексту програми.
Набір тексту програми.
File –> Save As ... – збереження тексту програми у файлі з розширенням .asm.
![]() Options –> Development Mode – вибір типу мікроконтролера
Options –> Development Mode – вибір типу мікроконтролера
(PIC16F877) і режиму (Simulator).
![]() Project –> Build –.
Project –> Build –.
Якщо є помилки – виправлення помилок і перехід до компіляції програми.
![]() Debug –> Simulator Stimulus –> Clock Stimulus ... – задання зовнішніх сигналів на входи портів введення/виводу.
Debug –> Simulator Stimulus –> Clock Stimulus ... – задання зовнішніх сигналів на входи портів введення/виводу.
![]() Window –> Special Function Registers – відкриття вікна регістрів спеціального призначення.
Window –> Special Function Registers – відкриття вікна регістрів спеціального призначення.
![]() Debug –> Run –> Reset – скидання мікроконтролера.
Debug –> Run –> Reset – скидання мікроконтролера.
Debug –> Run –> Step – покрокове виконання програми.
![]() File –> Exit – вихід із програми.
File –> Exit – вихід із програми.
4 Зміст звіту
![]() Тема
Тема
Мета.
Індивідуальне завдання.
Лістинг програми (файл .lst) із докладним коментуванням виконання програми.
![]() Короткий опис програми.
Короткий опис програми.
Методика тестування програми і вміст .sti файлу.
Результати виконання програми. Висновки.
Лабораторна робота 2
Режими роботи таймера. Сторожовий таймер (WDT)
1 Мета
Вивчити основні режими функціонування таймера, способи й особливості його ініціалізації, варіанти використання і настроювання попереднього дільника, функціонування сторожового таймера.
2 Завдання по лабораторний роботі
2.1 Зробити ініціалізацію таймера, зробити конфігурацію елементів схеми таймера відповідно до варіанта завдання.
2.1.1 Визначити значення біта T0CS (біт 5 у регістрі OPTION).
2.1.2 Визначити значення біта T0SE (біт 4 у регістрі OPTION).
2.1.3 Визначити значення біта PSA (біт 3 у регістрі OPTION).
2.1.4 Визначити значення бітів PS2 – PS0 (біти 2 – 0 у регістрі OPTION).
2.2 Зробити ділення зовнішньої частоти F, що надходить на вивід RA4/T0CKI мікроконтролера PIC16F877 з коефіцієнтом ділення К1.
Отриману частоту вивести на вивід RB0 мікроконтролера.
2.3 Оцінити максимально можливу вхідну частоту F.
2.4 Визначити період скидання сторожового таймера при використанні попереднього дільника з коефіцієнтом ділення K2.
2.5 Проаналізувати функціонування сторожового таймера в режимі SLEEP.
3 Варіанти завдань
3.1. Для парних номерів за списком журналу групи рахунковий перепад – фронт імпульсу.
3.2. Для непарних номерів за списком журналу групи рахунковий перепад – спад імпульсу.
3.3. Коефіцієнт розподілу частоти К1 = C + I + N, де C – номер групи, I – індекс групи (1 для «1», 2 для «2» і т.д.), N – номер студента за списком журналу групи.
3.4. Коефіцієнт ділення попереднього дільника K2 = 2n, при n = N mod 8, де N – номер студента за списком журналу групи.
Приклад програми. Конфігурація схеми таймера за наступними вихідними даними: тактування таймера виробляється від зовнішнього джерела тактових імпульсів по задньому фронту із використанням попереднього дільника з коефіцієнтом ділення 1:64.
…
movlw b‘00110101‘
; | | | | | | | |
; | | | | |└┴┴─── коефіцієнт поперед.дільника 1:64
; | | | |└────── попередній дільник підключений до
; | | | | каналу таймера
; | | | └─────── тактування по задньому фронту
; └──── тактування від зовнішнього генератора ; └┴───────── у даній роботі не мають значення
movwf OPTION_REG ; конфігурування схеми таймера
… ; продовження програми
Приклад програми. Підрахунок 10 тактових імпульсів за допомогою таймера, за умови, що таймер сконфігурований заздалегідь.
…
bcf INTCON, GIE ; заборона переривань bcf INTCON, T0IF ; скидання прапорця переповнення
| ; таймера |
|
| movlw |
.256-10 ; формування константи для |
| movwf |
TMR0 ; ініціалізації таймера |
| m1 btfss |
INTCON, T0IF ; очікування переповнення таймера |
| goto m1 |
; перехід, якщо таймер не переповнений |
… ; продовження програми
Зауваження. Імена регістрів TMR0 (адреса 0x01), INTCON (адреса 0x0B), і біт T0IF(2), GIE(7), доступні при підключенні заголовного файлу P16F877.INC, або повинні бути описані в описовій секції програми.
Приклад програми. Визначення скидання мікроконтролера за сигналом сторожового таймера. …
btfsc STATUS,-TO ; перевірка прапорця спрацьовування WDT goto res ; перехід, якщо не скидання від WDT brfss STATUS,-PD ; перевірка прапорця спрацьовування WDT goto WDT_RES ; перехід на підпрограму обробки
; скидання за сигналом WDT res
… ; продовження програми
Зауваження. Для можливості функціонування сторожового таймера в пакеті MPLAB, необхідно зробити його настроювання: меню Options–> Processor Setup–>Hardware–>WDT Chip Reset Enable (для пакета MPLAB ver. 4.12).
Імена регістру STATUS (адреса 0x03), і біт -TO(4), -PD(3) доступні при підключенні заголовного файлу P16F877.INC, або повинні бути описані в описовій секції програми.
4 Зміст звіту 4.1 Тема.
4.2 Мета.
4.3 Індивідуальне завдання.
4.4 Структурна схема таймера та сторожового таймера.
4.5 Пояснення до схеми.
4.6 Лістинг програми (файл .lst) із докладним коментуванням виконання програми.
4.7 Короткий опис програми.
4.8 Методика тестування програми і вміст .sti файлу.
4.9 Результати виконання програми. 4.10 Висновки.
Лабораторна робота 3
Формування часових інтервалів Сторінкова організація пам'яті
1 Мета
Вивчити способи формування часових інтервалів різної тривалості, організацію сторінкової пам'яті програм і даних.
2 Завдання по лабораторній роботі
2.1 На виводі RB1 мікроконтролера сформувати імпульс тривалістю t1.
2.1.1 Реалізувати часову затримку заданої тривалості.
2.1.2 Спираючись на знання, отримані в лабораторній роботі 1 на виводі RB1 мікроконтролера сформувати імпульс заданої тривалості.
2.2 На виводі RB2 мікроконтролера сформувати імпульс тривалістю t2.
2.2.1 Реалізувати часову затримку заданої тривалості без використання таймера у вигляді підпрограми і розташувати її за адресою 0x123 у пам'яті програм.
2.2.2 Спираючись на знання, отримані в лабораторній роботі 1 на виводі RB2 мікроконтролера, сформувати імпульс заданої тривалості. Виклик підпрограм робити явно.
2.3 На виводі RB3 мікроконтролера сформувати імпульс тривалістю t3.
2.3.1 Реалізувати часову затримку заданої тривалості з використанням таймера у вигляді підпрограми і розташувати її за адресою 0x234 у пам'яті програм.
2.3.2 Спираючись на знання, отримані в лабораторній роботі 1 на виводі RB3 мікроконтролера сформувати імпульс заданої тривалості. Виклик підпрограм робити неявним чином.
3 Варіанти завдань
![]() 3.1 t1 = [(N mod 5) + 1] tц
, де N – номер студента за списком журналу групи, tц
– тривалість командного циклу.
3.1 t1 = [(N mod 5) + 1] tц
, де N – номер студента за списком журналу групи, tц
– тривалість командного циклу.
![]() 3.2 t2 = (C + I N) tц
, де C – номер групи, I – індекс групи, N – номер студента за списком журналу групи, tц
– тривалість командного циклу.
3.2 t2 = (C + I N) tц
, де C – номер групи, I – індекс групи, N – номер студента за списком журналу групи, tц
– тривалість командного циклу.
![]() 3.3 t3 = 20 C I N tц
, де C – номер групи, I – індекс групи, N – номер студента за списком журналу групи, tц
– тривалість командного циклу.
3.3 t3 = 20 C I N tц
, де C – номер групи, I – індекс групи, N – номер студента за списком журналу групи, tц
– тривалість командного циклу.
![]()
![]() 3.4 Для парних номерів за списком журналу групи формувати позитивний імпульс на виводах мікроконтролера ( ), а для непарних номерів – негативний імпульс ().
3.4 Для парних номерів за списком журналу групи формувати позитивний імпульс на виводах мікроконтролера ( ), а для непарних номерів – негативний імпульс ().
Приклад програми. Виконання затримки без використання таймера:
…
movlw CDEL ;[1] запис константи movwf VDEL ;[1] у лічильник m1 decfsz VDEL, 1 ;[1] зменшення значення лічильника
;[2] якщо VDEL = 0 пропуск наступної команди
goto m1 ;[2] перехід, якщо VDEL ≠ 0
… ; продовження програми
Зауваження. У квадратних дужках зазначений час виконання кожної команди у машинних циклах. Час виконання фрагмента програми tв при різних значеннях константи CDEL обчислюється таким чином: при CDEL = 1 tв = 1 + 1 + 2 = 4 такти, при CDEL = 2 tв = 1 + 1 + 1 + 2 + 2 = 7 тактів.
![]()
![]() Таким чином, у загальному випадку затримка буде дорівнювати tз
= (3 CDEL + 1) tц
.
Таким чином, у загальному випадку затримка буде дорівнювати tз
= (3 CDEL + 1) tц
.
Приклад програми. Виконання затримки із використанням таймера:
…
; ініціалізація таймера
movlw b'00000000' ;тактування від внутрішнього генератора ;з попереднім дільником при К = 2 bsf STATUS, RP0 ;вибір банку 1
movwf OPTION_REG ;запис у регістр OPTION bcf STATUS, RP0 ;вибір банку 0
…
bcf INTCON, T0IF ;[1] скидання прапорця переповнення
; таймера movlw CDEL ;[1] запис константи для
movwf TMR0 ;[1] ініціалізації лічильника
m1
btfss INTCON, T0IF ;[1] перевірка біта T0IF у регістрі ; INTCON
;[2] якщо T0IF = 1 пропуск наступної
; команди
goto m1 ;[2] перехід, якщо T0IF = 0
… ; продовження програми
![]() Зауваження.
У загальному випадку затримка буде приблизно дорівнювати tз
= [3 + (256 – CDEL) K] tц
, де K – коефіцієнт ділення попереднього дільника (1, 2, 4, 8, …, 256).
Зауваження.
У загальному випадку затримка буде приблизно дорівнювати tз
= [3 + (256 – CDEL) K] tц
, де K – коефіцієнт ділення попереднього дільника (1, 2, 4, 8, …, 256).
Приклад програми. Неявний виклик підпрограми з адресою 0x345:
… ; основна програма
call proc1 ; виклик підпрограми proc1 … ; продовження основної програми
proc1 ; підпрограма proc1
movlw 0x03 ; запис старших розрядів movwf PCLATH ; у регістр PCLATH
| movlw 0x45 |
; запис молодших розрядів |
| movwf PCL … |
; у регістр PCL і перехід за адресою 0x345 |
| org 0x345 |
; розміщення підпрограми з адреси 0x345 |
| … |
; команди підпрограми |
| return |
; повернення з підпрограми в основну |
| 4 Зміст звіту 4.1 Тема. 4.2.Мета. |
; програму |
4.3 Індивідуальне завдання.
4.4 Алгоритми програм і підпрограм.
4.5 Лістинг програми (файл .lst) із докладним коментуванням виконання програми.
4.6 Короткий опис програми.
4.7 Результати виконання програми. 4.8 Висновки.
Лабораторна робота 4
Організація і використання пам'яті даних
1 Мета
Вивчити сторінкову організацію пам'яті даних. Навчитися використовувати режим непрямої адресації комірок пам'яті даних. Вивчити організацію і способи доступу до енергонезалежної пам'яті даних (EEPROM).
2 Завдання по лабораторній роботі
2.1 Використовуючи метод прямої адресації записати в пам'ять даних мікроконтролера PIC16F877 своє прізвище, ім'я та по батькові.
2.2 Використовуючи метод непрямої адресації переписати анкетні дані з пам'яті даних в енергонезалежну пам'ять (EEPROM).
2.3 Виконати запис в комірку енергонезалежної пам‘яті даних згідно з варіантом.
2.4 Визначити час запису одного байта в EEPROM.
2.5 Визначити можливість читання даних з EEPROM відразу після початку циклу запису.
3 Варіанти завдань
Варіант 1. В останню комірку EEPROM записати контрольну суму всіх інших комірок пам'яті, що обчислюється шляхом додавання за модулем 2.
Варіант 2. В останню комірку EEPROM записати контрольну суму всіх інших комірок пам'яті, що обчислюється шляхом додавання по модулю
256.
Варіант 3. В останню комірку EEPROM записати максимальне значення з всіх інших комірок пам'яті.
Варіант 4. В останню комірку EEPROM записати мінімальне значення з всіх інших комірок пам'яті.
Варіант 5. В останню комірку EEPROM записати середнє значення з всіх інших комірок пам'яті.
Приклад програми. Очищення 10 байтів пам'яті даних, починаючи з адреси 0x0C, використовуючи метод непрямої адресації:
…
movlw 0x0C ; встановлення початкової адреси
movwf FSR ; ініціалізація покажчика
movlw 10 ; ініціалізація лічильника CTR значенням 10 movwf CTR
m1 clrf INDF ; очищення комірки пам'яті даних incf FSR ; збільшення значення покажчика decfsz CTR, 1 ; зменшення значення лічильника goto m1 ; перехід, якщо не остання комірка
… ; продовження програми
Зауваження. Лічильник CTR не повинен розташовуватися в комірках пам'яті, що очищаються. Імена регістрів FSR (адреса 0x00) і INDF (адреса 0x04) доступні при підключенні заголовного файлу P16F877.INC або повинні бути описані в описовій секції програми.
Приклад програми. Читання даних з комірки пам'яті EEPROM з адресою 0x10 у регістр W:
…
bcf STATUS, RP0 ; вибір банку 0
movlw 0x10 ; визначення адреси комірки пам'яті
; EEPROM
movwf EEADR bsf STATUS, RP0 ; вибір банку 1 bsf EECON1, RD ; строб читання bcf STATUS, RP0 ; вибір банку 0
movf EEDATA, W ; запис у регістр W результату
; читання
…
Приклад програми. Запис значення регістру W у комірку пам'яті EEPROM з адресою 0x10:
…
bcf STATUS, RP0 ; вибір банку 0 movwf EEDATA ; дані для запису
movlw 0x10 ; визначення адреси комірки пам'яті
; EEPROM
movwf EEADR
bsf STATUS, RP0 ; вибір банку 1 bsf EECON1, WREN ; дозвіл запису
bcf EECON1, EEIF ;- скидання прапорця закінчення
; запису в EEPROM
bcf INTCON, GIE ;+ заборона переривань
movlw 0x55 ;+ обов'язкова послідовність команд
movwf EECON2 ;+ movlw 0xAA ;+ movwf EECON2 ;+
bsf EECON1, WR ;+ строб запису
m1 btfss EECON1, EEIF ;- очікування закінчення запису в
; EEPROM goto m1 ;-
bcf STATUS, RP0 ; вибір банку 0
…
Зауваження. Послідовність команд, що відзначені символом ―+‖ є обов'язковою. Команди, що відзначені символом ―–‖ є необов'язковими у випадку однократного запису. Імена регістрів STATUS (адреса 0x03), EEDATA (адреса 0x08), EEADR (адреса 0x09), INTCON (адреса 0x0B), EECON1 (адреса 0x88), EECON2 (адреса 0x89), і біт RP0(5), RD(0), WR(1), WREN(2), EEIF(4), GIE(7) доступні при підключенні заголовного файлу P16F84.INC або повинні бути описані в описовій секції програми.
4. ЗМІСТ ЗВІТУ 4.1. Тема.
4.2. Мета.
4.3. Індивідуальне завдання.
4.4. Алгоритми програм і підпрограм.
4.5. Лістинг програми (файл .lst) із докладним коментуванням виконання програми.
4.6. Короткий опис програми.
4.7. Результати виконання програми. 4.8. Висновки.
Лабораторна робота 5
Система переривань мікроконтролера PIC16F84.
Власні оброблювачі переривань
1 Мета
Вивчити систему переривань мікроконтролера PIC16F84, способи формування переривань, використання оброблювачів декількох переривань.
2 Завдання по лабораторній роботі
2.1 Написати оброблювачі переривань відповідно до варіанта завдання і номера студента за списком журналу групи.
3 Варіанти завдань
3.1 Визначте джерело переривання відповідно до варіанта завдання і номера студента за списком журналу групи за таблицею.
| Джерело переривання |
Номер у журналі групи |
||||||||||||||||||||
| 1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
21 |
|
| Переповнення таймера |
* |
* |
* |
* |
* |
* |
* |
||||||||||||||
| Передній фронт сигналу на виводі RB0/INT |
* |
* |
* |
* |
* |
* |
|||||||||||||||
| Задній фронт сигналу на виводі RB0/INT |
* |
* |
* |
* |
* |
* |
|||||||||||||||
| Закінчення запису в EEPROM |
* |
* |
* |
* |
* |
* |
* |
||||||||||||||
| Зміна рівня сигналу на виводі RB4 |
* |
* |
* |
* |
|||||||||||||||||
| Зміна рівня сигналу на виводі RB5 |
* |
* |
* |
* |
|||||||||||||||||
| Зміна рівня сигналу на виводі RB6 |
* |
* |
* |
* |
|||||||||||||||||
| Зміна рівня сигналу на виводі RB7 |
* |
* |
* |
* |
|||||||||||||||||
3.2 Оброблювач переривання по переповненню таймера повинен виконувати.
Варіант 1. Запис у таймер нового значення, інвертування рівня сигналу на виводі RA0.
Варіант 2. Запис у таймер нового значення, інкремент комірки пам'яті даних.
Варіант 3. Запис у таймер нового значення з енергонезалежної пам'яті даних.
Варіант 4. Запис у таймер нового значення, запис цього значення в енергонезалежну пам'ять даних.
3.3 Оброблювач переривання по передньому фронту сигналу на виводі RB0/INT повинен виконувати.
Варіант 1. Інкремент 16-розрядного лічильника в пам'яті даних.
Варіант 2. Інвертування рівня сигналу на виводі RA1.
Варіант 3. Запис поточного значення таймера в комірку пам'яті даних.
Варіант 4. Прийом дискретного сигналу з входу RA2 і видачу його на вивід RA3.
3.4 Оброблювач переривання по задньому фронту сигналу на виводі RB0/INT повинен виконувати.
Варіант 1. Читання 4-розрядного числа з порту A, запис його в комірку пам'яті даних.
Варіант 2. Запис поточного значення таймера в комірку енергонезалежної пам'яті даних.
Варіант 3. Декремент 16-розрядного лічильника в пам'яті даних.
Варіант 4. Інвертування рівня сигналу на виводі RA2.
3.5 Оброблювач переривання по закінченню запису в енергонезалежну пам'ять даних (EEPROM) повинен виконувати.
Варіант 1. Запис поточного значення таймера в комірку пам'яті даних.
Варіант 2. Установку прапорця дозволу запису в EEPROM.
Варіант 3. Інкремент комірки пам'яті даних.
Варіант 4. Декремент комірки пам'яті даних.
3.6 Оброблювач переривання за зміною рівня сигналу на виводі RB4 повинен виконувати.
![]() Варіант 1. Формування позитивного імпульсу тривалістю ti = N 10 tц
на виводі RA0.
Варіант 1. Формування позитивного імпульсу тривалістю ti = N 10 tц
на виводі RA0.
![]() Варіант 2. Формування позитивного імпульсу тривалістю ti = [(N mod 10) + 2] tц
на виводі RA1.
Варіант 2. Формування позитивного імпульсу тривалістю ti = [(N mod 10) + 2] tц
на виводі RA1.
![]() Варіант 3. Формування негативного імпульсу тривалістю ti = N 10 tц
на виводі RA2.
Варіант 3. Формування негативного імпульсу тривалістю ti = N 10 tц
на виводі RA2.
![]() Варіант 4. Формування негативного імпульсу тривалістю ti = [(N mod 10) + 2] tц
на виводі RA1.
Варіант 4. Формування негативного імпульсу тривалістю ti = [(N mod 10) + 2] tц
на виводі RA1.
Де N – номер студента за списком журналу групи, tц – тривалість командного циклу.
3.7 Оброблювач переривання за зміною рівня сигналу на виводі RB5 повинен виконувати.
![]() Варіант 1. Формування на виводі RA3 імпульсної послідовності з трьох імпульсів негативної полярності, тривалістю і паузою, рівною ti = 5 tц
з обов'язковим використанням виклику підпрограми для формування часового інтервалу.
Варіант 1. Формування на виводі RA3 імпульсної послідовності з трьох імпульсів негативної полярності, тривалістю і паузою, рівною ti = 5 tц
з обов'язковим використанням виклику підпрограми для формування часового інтервалу.
![]() Варіант 2. Формування на виводі RA2 імпульсної послідовності з двох імпульсів позитивної полярності, тривалістю і паузою, рівною ti = 5 tц
.
Варіант 2. Формування на виводі RA2 імпульсної послідовності з двох імпульсів позитивної полярності, тривалістю і паузою, рівною ti = 5 tц
.
![]() Варіант 3. Формування на виводі RA1 імпульсної послідовності з двох імпульсів негативної полярності, тривалістю імпульсів ti = 3
Варіант 3. Формування на виводі RA1 імпульсної послідовності з двох імпульсів негативної полярності, тривалістю імпульсів ti = 3 ![]() tц
і паузою, рівною tп = 7 tц
.
tц
і паузою, рівною tп = 7 tц
.
![]()
![]() Варіант 4. Формування на виводі RA0 імпульсної послідовності з двох імпульсів позитивної полярності, тривалістю імпульсів ti = 7 tц
, і паузою рівною tп = 3 tц
.
Варіант 4. Формування на виводі RA0 імпульсної послідовності з двох імпульсів позитивної полярності, тривалістю імпульсів ti = 7 tц
, і паузою рівною tп = 3 tц
.
3.8 Оброблювач переривання за зміною рівня сигналу на виводі RB6 повинен виконувати.
Варіант 1. Одночасне інвертування сигналів на виводах RA0 і RA1.
Варіант 2. Обмін рівнів сигналів на виводах RA1 і RA2.
Варіант 3. Прийом дискретного сигналу з виводу RA3 і видачу його на вивід RA0.
Варіант 4. Обмін рівнів сигналів на виводах RA3 і RA2.
3.9 Оброблювач переривання за зміною рівня сигналу на виводі RB7 повинен виконувати.
![]() Варіант 1. Формування на виводі RA0 імпульсної послідовності з трьох імпульсів негативної полярності, тривалістю і паузою, рівною ti = 3 tц
.
Варіант 1. Формування на виводі RA0 імпульсної послідовності з трьох імпульсів негативної полярності, тривалістю і паузою, рівною ti = 3 tц
.
![]() Варіант 2. Формування на виводі RA1 імпульсної послідовності з двох імпульсів позитивної полярності, тривалістю і паузою, рівною ti = 7 tц
з обов'язковим використанням виклику підпрограми для формування часового інтервалу.
Варіант 2. Формування на виводі RA1 імпульсної послідовності з двох імпульсів позитивної полярності, тривалістю і паузою, рівною ti = 7 tц
з обов'язковим використанням виклику підпрограми для формування часового інтервалу.
![]()
![]() Варіант 3. Формування на виводі RA2 імпульсної послідовності з трьох імпульсів позитивної полярності, тривалістю імпульсів ti = 7 tц
і паузою, рівною tп = 3 tц
.
Варіант 3. Формування на виводі RA2 імпульсної послідовності з трьох імпульсів позитивної полярності, тривалістю імпульсів ti = 7 tц
і паузою, рівною tп = 3 tц
.
![]()
![]() Варіант 4. Формування на виводі RA3 імпульсної послідовності з чотирьох імпульсів негативної полярності, тривалістю імпульсів ti = 3 tц
і паузою, рівною tп = 5 tц
.
Варіант 4. Формування на виводі RA3 імпульсної послідовності з чотирьох імпульсів негативної полярності, тривалістю імпульсів ti = 3 tц
і паузою, рівною tп = 5 tц
.
Приклад програми. Збереження регістрів при виклику переривання і виклик оброблювача переривання за зміною рівня сигналу на виводі RB7.
…
STATUS EQU 0x03 ; адреса регістру STATUS
PORTB EQU 0x06 ; адреса регістру PORTB
RBIF EQU 0x07 ; номер розряду прапорцевого біта
INTCON EQU 0x0B ; адреса регістру INTCON
W_TEMP EQU 0x0C ; адреса регістру збереження W STATUS_TEMP EQU 0X0D ; адреса регістру збереження STATUS
oldportb EQU 0x0E ; адреса регістру збереження стану
; порту B
int_point org 0x04 ; вектор переривань movwf W_TEMP ; збереження W
swapf STATUS,w ; збереження STATUS
movwf STATUS_TEMP btfsc INTCON,RBIF ; переривання при зміні RB4-RB7?
call INTRB7 ; виклик оброблювача переривання
; при зміні сигналу на виводах
; RB4-RB7
swapf STATUS_TEMP,W ; відновлення регістру STATUS
movwf STATUS
swapf W_TEMP, F ; відновлення регістру W swapf W_TEMP, W
| retfie |
; повернення з переривання |
| INTRB7 |
; оброблювач переривання |
| ; при зміні сигналу на виводах |
|
| ; RB4-RB7 |
movf PORTB, W ; читання стану порту B xorwf oldportb, F ; порівняння з попереднім значенням btfss oldportb, 7 ; зміна RB7? goto NOTRB7 ; немає змін
… ; необхідні дії при зміні RB7
NOTRB7
movf PORTB, W ; читання стану порту B movwf oldportb ; збереження для наступного
; порівняння
bcf INTCON,RBIF ; очищення прапорця переривання return
… ; продовження програми
Зауваження. Імена регістрів спеціального призначення доступні при підключенні заголовного файлу P16F84.INC або повинні бути описані в описовій секції програми.
4 Порядок виконання роботи
4.1 Дозволити необхідні переривання, замаскувати інші.
4.2 Сформувати умови для формування відповідних переривань.
4.3 Визначити максимальний час обробки переривання в тактах і в одиницях часу, при тактуванні мікроконтролера від тактового генератора з частотою Fosc = 8 МГц.
5 Зміст звіту
5.1 Тема. 5.2 Мета.
5.3 Індивідуальне завдання.
5.4 Структурна схема системи переривань.
5.5 Пояснення до схеми.
5.6 Лістинг програми (файл .lst) із докладним коментуванням виконання програми.
5.7 Короткий опис програми.
5.8 Результати виконання програми. 5.9 Висновки.
Лабораторна робота 6
Ведення і вивод аналогових сигналів
1 Мета
Вивчити принцип роботи аналого-цифрового перетворювача на прикладі мікроконтролера PIC16C71. Навчитися вводити аналогові сигнали. Розглянути способи виводу аналогових сигналів. Навчитися формувати широтно-модульовані сигнали.
2 Короткі теоретичні відомості
2.1 Введення аналогових сигналів виконується за допомогою аналогово-цифрових перетворювачів (АЦП). На рисунку 5.1 наведена залежність одержуваного цифрового коду від вхідного аналогового сигналу для 8–розрядного АЦП.
![]()
Рисунок 5.1 - Функція перетворення АЦП
Для управління АЦП у мікроконтролері PIC16F877 необхідно використовувати наступні регістри:
![]() регістр результату (ADRES); регістр управління 0 (ADCON0); регістр управління 1 (ADCON1); регістр управління перериваннями (INTCON).
регістр результату (ADRES); регістр управління 0 (ADCON0); регістр управління 1 (ADCON1); регістр управління перериваннями (INTCON).
У регістрі ADRES зберігається результат аналого-цифрового перетворення. Коли перетворення завершене, результат перетворення записується в регістр ADRES, після цього скидається прапорець GO/DONE
(ADCON0<2>) і встановлюється прапорець переривання ADIF (ADCON0<1>). Потім необхідно витримати паузу 20 – 30 мкс для розряду ємності схеми вибірки-збереження АЦП (причому, це необхідно повторювати після кожного наступного циклу перетворення). І тільки після цього потрібно установити біт GO/DONE (ADCON0<2>) для початку перетворення.
Алгоритм дій для виконання аналого-цифрового перетворення слідуючий:
1. Здійснити конфігурацію (ініціалізацію) модуля АЦП:
![]() вибрати аналогові входи та джерело опорної напруги (біти PCFG2 – PCFG0 у регістрі ADCON1);
вибрати аналогові входи та джерело опорної напруги (біти PCFG2 – PCFG0 у регістрі ADCON1);
![]() вибрати вхідний канал АЦП (біти CHS2 – CHS0 у регістрі ADCON0);
вибрати вхідний канал АЦП (біти CHS2 – CHS0 у регістрі ADCON0); ![]() вибрати джерело та частоту імпульсів перетворення (біти ADCS1,
вибрати джерело та частоту імпульсів перетворення (біти ADCS1,
ADCS0 у регістрі ADCON0); ![]() включити модуль АЦП (біт ADON у регістрі ADCON0).
включити модуль АЦП (біт ADON у регістрі ADCON0).
2. Настроїти переривання від модуля АЦП (при необхідності):
![]()
![]() скинути прапор закінчення переривання (біт ADIF у регістрі ADCON0); дозволити переривання від АЦП (біт ADIE у регістрі INTCON); дозволити всі переривання (біт GIE у регістрі INTCON).
скинути прапор закінчення переривання (біт ADIF у регістрі ADCON0); дозволити переривання від АЦП (біт ADIE у регістрі INTCON); дозволити всі переривання (біт GIE у регістрі INTCON).
3. Витримати паузу 20 – 30 мкс.
4. Почати аналого-цифрове перетворення:
![]() установити біт запуску АЦП (біт GO/DONE у регістрі ADCON0).
установити біт запуску АЦП (біт GO/DONE у регістрі ADCON0).
5. Очікувати закінчення перетворення, наприкінці якого автоматично виконується:
![]() скидання біта закінчення перетворення (біт GO/DONE у регістрі ADCON0);
скидання біта закінчення перетворення (біт GO/DONE у регістрі ADCON0); ![]() формування сигналу (установка біта ADIF у регістрі ADCON0).
формування сигналу (установка біта ADIF у регістрі ADCON0).
6. Отримати результати перетворення:
![]() прочитати результат перетворення (регістр ADRES); скинути, якщо необхідно, прапорець закінчення переривання (біт ADIF у регістрі ADCON0).
прочитати результат перетворення (регістр ADRES); скинути, якщо необхідно, прапорець закінчення переривання (біт ADIF у регістрі ADCON0).
7. Виконати дії, починаючи з пункту 1 або пункту 2, для виконання наступного перетворення.
2.2 Вивод аналогових сигналів виконується за допомогою цифро-аналогових перетворювачів. Сигнал з амплітудою, пропорційною цифровому коду, можна також одержати, використовуючи широтноімпульсну модуляцію (ШІМ), що представляє собою сигнали змінної тривалості при постійному періоді. Амплітуда такого сигналу, що пройшов через інтегруючий ланцюжок або через фільтр низької частоти (ФНЧ), пропорційна тривалості ШІМ сигналу.
На рисунку 5.2 наведений приклад формування ШІМ сигналу з різною тривалістю tи1 , tи2 , tи3 і постійним періодом T.
![]() Uвих
, В
Uвих
, В
tі1
Рисунок 5.2- Форма ШІМ сигналу
На рисунку 5.3 наведений приклад схеми формування аналогового сигналу з ШІМ сигналу із використанням RC ланцюжка у якості ФНЧ першого порядку і повторювача на операційному підсилювачі.
![]()
Рисунок 5.3 - Формування аналогового сигналу
Для розрахунку значень R і C звернемося до амплітудно-частотної характеристики (АЧХ) ФНЧ, що представлена на рисунок 5.4.
![]()
![]() Ширина спектра вихідного сигналу без використання ФНЧ дорівнює PWM
= 1/T, а при використанні ФНЧ – ГР
. Частота
Ширина спектра вихідного сигналу без використання ФНЧ дорівнює PWM
= 1/T, а при використанні ФНЧ – ГР
. Частота ![]() повинна бути значно менше (у 5 і більш разів) частоти PWM
. Тоді, задавши одне зі значень R або C, за формулою RC = 1/(2 ), де = ГР
– частота зрізу фільтра, можна знайти інше значення.
повинна бути значно менше (у 5 і більш разів) частоти PWM
. Тоді, задавши одне зі значень R або C, за формулою RC = 1/(2 ), де = ГР
– частота зрізу фільтра, можна знайти інше значення.
![]() К
К
1
0,707
Рисунок 5.4 - Амплітудно-частотна характеристика ФНЧ
3 Завдання по лабораторній роботі 3.1 Введення аналогових сигналів.
3.1.1 Виконати конфігурацію мікроконтролера на вводу аналогових сигналів.
3.1.2 Ввести сигнали з двох аналогових датчиків U1 і U2.
3.1.3 Зробити порівняння введених сигналів.
3.1.4 За результатами порівняння виконати підпрограму згідно варіанту.
3.1.5 Визначити час виконання перетворення АЦП.
3.2 Вивід аналогових сигналів.
3.2.1 На заданому виводі мікроконтролера сформувати сигнал із заданим періодом повторення T і числом рівнів квантування N.
4 Варіанти завдання 4.1.
| 1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
|
| U1 < U2 |
A |
B |
C |
D |
E |
F |
G |
H |
I |
J |
A |
B |
C |
D |
E |
F |
D |
C |
I |
J |
| U1 = U2 |
I |
J |
G |
H |
E |
F |
D |
C |
B |
J |
A |
I |
C |
G |
F |
E |
G |
H |
I |
A |
| U1 > U2 |
A |
J |
C |
H |
B |
D |
G |
C |
I |
E |
J |
B |
H |
D |
E |
E |
D |
H |
B |
J |
Дії підпрограм:
A – інкремент комірки пам'яті даних;
B – декремент 16-розрядного лічильника в пам'яті даних;
C – читання 8-розрядного числа з порту B і запис його в комірку пам'яті даних;
D – запис поточного значення таймера (регістр TMR0) в комірку пам'яті даних;
E ![]() – формування позитивного імпульсу тривалістю ti
= 5 tц
на виводі RB0, де tц
– тривалість командного циклу;
– формування позитивного імпульсу тривалістю ti
= 5 tц
на виводі RB0, де tц
– тривалість командного циклу;
F – інкремент 16-розрядного лічильника в пам'яті даних;
G – одночасне інвертування сигналів на виводах RB0 і RB1;
H – декремент комірки пам'яті даних;
I – обмін рівнів сигналів на виводах RB1 і RB2;
J – прийом дискретного сигналу з виводу RB3 і видача його на вивід RB0. Варіанти завдання 4.2
| 1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
14 |
15 |
16 |
17 |
18 |
19 |
20 |
|
| Вивід RB |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
0 |
1 |
2 |
3 |
| T, мс |
2 |
4 |
8 |
16 |
32 |
64 |
2 |
4 |
8 |
16 |
64 |
2 |
4 |
8 |
16 |
32 |
64 |
2 |
4 |
8 |
| N |
25 6 |
12 8 |
64 |
32 |
25 6 |
12 8 |
64 |
32 |
25 6 |
12 8 |
64 |
32 |
25 6 |
12 8 |
64 |
32 |
25 6 |
12 8 |
64 |
32 |
![]() Тактування мікроконтролера виконати від тактового генератора з частотою OSC = 4 МГц.
Тактування мікроконтролера виконати від тактового генератора з частотою OSC = 4 МГц.
Приклад програми. Фрагмент програми, що виконує настроювання АЦП і аналого-цифрове перетворення вхідного сигналу з виводу RA2/AN2.
; підключення файлу з описом стандартних констант і значень #include p16c71.inc
…
; Настроювання АЦП
initAD
bsf STATUS, RP0 ; вибір банку 1
movlw b‘00000000‘ ; вив.RA3-RA0–аналогові входи
movwf ADCON1
bcf STATUS, RP0 ; вибір банку 0
movlw b'11010001' ; RC-генератор для АЦП,
movwf ADCON0 ; канал 2, дозвіл АЦП
; Перетворення Convert
call Delay30us ; затримка 30 мкс
bsf ADCON0, GO_DONE ; запуск АЦП loop btfsc ADCON0, GO_DONE ; перетворення закінчене?
goto loop ; продовжити чекання
movf ADRES, W ; результат перетворення в W
… ; продовження програми
5 Моделювання роботи АЦП у пакеті MPLAB
5.1 Створити текстовий файл із передбачуваними значеннями результатів перетворення АЦП, наприклад adcres.reg
5.2 Відкрити вікно Register Stimulus через меню: Debug->Simulator Stimulus->Register Stimulus->Enable...
5.3 У полі Program Memory Address вказати адресу команди в пам'яті програм (дозволяється і рекомендується вказувати мітку), наприклад, ares.
5.4 У полі Register Address вкажіть адресу або символьне ім'я регістра, наприклад, ADRES.
5.5 Натисніть кнопку Browse... для вказівки файлу стимулу, наприклад, adcres.reg.
5.6 Після скидання мікроконтролера, щораз, коли значення лічильника команд PC співпаде з указаною адресою ares, у регістр ADRES буде занесене значення з файлу adcres.reg. При досягненні кінця файлу adcres.reg підстановка почнеться з початку файлу, тобто буде виконуватися циклічно.
6 Зміст звіту 6.1 Тема.
6.2 Мета.
6.3 Індивідуальне завдання.
6.4 Лістинг програми із докладним коментуванням виконання програми.
6.5 Короткий опис програм.
6.6 Результати виконання програм. 6.7 Висновки.
Література
1. Предко М. Справочник по PIC-микроконтроллерам: Пер. с англ. – М.: ДМК Пресс, 2004.-512с.
Додаток А – Регістри спеціального призначення
| Адреса |
Им‘я |
Біт7 |
Біт6 |
Біт5 |
Біт4 |
Біт3 |
Біт2 |
Біт1 |
Біт0 |
FOR, BOR |
| Банк 0 |
||||||||||
| 00h |
INDF |
Звертання до регістра, адреса якого записана в FSR (не фізичний регістр) |
0000 0000 |
|||||||
| 01h |
TMRO |
Регістр таймера 0 |
хххх хххх |
|||||||
| 02h |
PCL |
Молодші біти лічильника команд PC |
0000 0000 |
|||||||
| 03h |
STATUS |
IRP RP1 RPO -ТО -PD Z DC С |
0001 1ххх |
|||||||
| 04h |
FSR |
Регістр адреси при непрямій адресації |
хххх хххх |
|||||||
| 05h |
PORTA |
- - Зап. у вих. защіпку PORTA, читання стану вив.PORTA |
— 0х 0000 |
|||||||
| 06h |
PORTB |
Запис у вихідну защіпку PORTB, читання стану виводів PORTB |
хххх хххх |
|||||||
| 07h |
PORTC |
Запис у вихідну защіпку PORTC, читання стану виводів PORTC |
хххх хххх |
|||||||
| 08h |
PORTD |
Запис у вихідну защіпку PORTD, читання стану виводів PORTD |
хххх хххх |
|||||||
| 09h |
PORTE |
- |
- |
- |
- - RE2 RE1 REO |
----- -ххх |
||||
| OAh |
PCLATH |
- |
- |
- |
Старші біти лічильника команд PC |
---- 0 0000 |
||||
| OBh |
INTCON |
GIE |
PEIE |
TOIE |
INTE |
RBIE |
TOIF |
INTF |
RBIF |
0000 000х |
| 0Ch |
PIR1 |
PSPIF |
ADIF |
RCIF |
TXIF |
SSPIF |
CCP1I |
TMR2I |
TMR1I |
0000 0000 |
| 0Dh |
PIR2 |
- |
(5) |
- |
EEIF |
BCLIF |
- |
- |
CCP2I |
-г-0 0 — 0 |
| 0Eh |
TMR1L |
Молодший байт 16-розрядного таймера 1 |
хххх хххх |
|||||||
| 0Fh |
TMR1H |
Старший байт 16-розрядного таймера 1 |
хххх хххх |
|||||||
| 10h |
T1CON |
- - T1CKP T1CKP T1OSC T1SYN TMR1C TMR1O |
— 00 0000 |
|||||||
| 11h |
TMR2 |
Регістр таймера 2 |
0000 0000 |
|||||||
| 12h |
T2CON |
- TOUTP TOUTP TOUTP TOUTP TMR2O T2CKP T2CKP |
-000 0000 |
|||||||
| 13h |
SSPBUF |
Буфер приймача MSSP / регістр передавача |
хххх хххх |
|||||||
| 14h |
SSPCON |
WCOL SSPOV SSPEN СКР SSPM3| SSPM1 SSPMO |
0000 0000 |
|||||||
| 15h |
CCPR1L |
Молодший байт захвату/порівняння /ШІМ ССР1 |
хххх хххх |
|||||||
| 16h |
CCPR1 H |
Старший байт захвату/порівняння /ШІМ ССР1 |
хххх хххх |
|||||||
| 17h |
CCP1CON |
- |
- |
ССР1Х |
CCP1Y |
ССР1М |
ССР1М |
ССР1М |
ССР1М |
— 00 0000 |
| 18h |
RCSTA |
SPEN |
RX9 |
SREN |
CREN |
ADDE |
FERR |
OERR |
RX9D |
0000 ОООх |
| 19h |
TXREG |
Регистр данных передатчика USART |
0000 0000 |
|||||||
| 1Ah |
RCREG |
Регистр данных приемника USART |
0000 0000 |
|||||||
| 1Bh |
CCPR2L |
Молодший байт захвату/порівняння /ШІМ ССР2 |
||||||||
| 1Ch |
CCPR2H |
Старший байт захвату/порівняння /ШІМ ССР2 |
хххх хххх |
|||||||
| 1Dh |
CCP2CON |
- - ССР2Х CCP2Y |ССР2МЗ ССР2М ССР2М ССР2М |
— 00 0000 |
|||||||
| 1Eh |
ADRESH |
Старший байт результату перетворення АЦП |
хххх хххх |
|||||||
| 1Fh |
ADCONO |
ADCS1 ADCS CHS2 CHS1 CHSO GO/- - ADON |
0000 00-0 |
|||||||
| Банк 1 |
||||||||||
| 80h |
INDF |
Звертання до регістра, адреса якого записана в FSR (не фізичний регістр) |
0000 0000 |
|||||||
| 81h |
OPTION_RE |
-RBPU INTED TOCS TOSE PSA PS2 PS1 PSO |
1111 1111 |
|||||||
| 82h |
PCL |
Молодші біти лічильника команд PC |
0000 0000 |
|||||||
| 83h |
STATUS |
IRP RP1 RPO -ТО -PD Z DC с |
0001 1ххх |
|||||||
| 84h |
FSR |
Регістр адреси при непрямій адресації |
хххх хххх |
|||||||
| 85h |
TRISA |
- - | Напрям виводів PORTA |
— 11 1111 |
|||||||
| 86h |
TRISB |
Напрям виводів PORTB |
1111 1111 |
|||||||
| 87h |
TRISC |
Напрям виводів PORTC |
1111 1111 |
|||||||
| 88h |
TRISD |
Напрям виводів PORTD |
1111 1111 |
|||||||
| 89h |
TRISE |
IBF |
OBF |
IBOV |
PSPMODE | Напрям виводів PORTE |
0000 -111 |
||||
| 8Ah |
PCLATH |
- |
- |
- |
Старші біти лічильника команд PC |
------- 0 0000 |
||||
| 8Bh |
INTCON |
GIE |
PEIE |
TOIE |
INTE |
RBIE |
TOIF |
INTF |
RBIF |
0000 ОООх |
| 8Ch |
PIE1 |
PSPIE(2) |
ADIE |
RCIE |
TXIE |
SSPIE |
CCP1IE |
TMR2I |
TMR1I |
0000 0000 |
| 8Dh |
PIE2 |
- |
(5) |
- |
EEIE |
BCLIE |
- |
- |
CCP2IE |
-г-0 0 — 0 |
| 8Eh |
PCON |
- |
- |
- |
- |
- |
- |
-POR |
-BOR |
|
| 8Fh |
- |
Не реалізовано |
- |
|||||||
| 90h |
- |
Не реалізовано |
- |
|||||||
Продовження додатка А
| Адреса |
Им‘я |
Біт7 |
Біт6 |
Біт5 |
Біт4 |
Біт3 |
Біт2 |
Біт1 |
Біт0 |
FOR, BOR |
|
| 91h |
SSPCON2 |
GCEN ACKSTAT IACKDT ACKE RCEN PEN RSEN SEN |
0000 0000 |
||||||||
| 92h |
PR2 |
Регістр періоду таймера 2 |
1111 1111 |
||||||||
| 93h |
SSPADD |
Регістр адреси / Регістр генератора швидкості обміну |
0000 0000 |
||||||||
| 94h |
SSPSTAT |
SMP СКЕ D/-A Р S R/-W UA BF |
0000 0000 |
||||||||
| 95h |
- |
Не реалізовано |
- |
||||||||
| 96h |
- |
Не реалізовано |
- |
||||||||
| 97h |
- |
Не реалізовано |
- |
||||||||
| 98h |
TXSTA |
CSRC ТХ9 TXEN SYNC - BRGH TRMT TX9D |
0000 -010 |
||||||||
| 99h |
SPBRG |
Регістр генератора швидкості USART |
0000 0000 |
||||||||
| 9Ah |
- |
Не реалізовано |
- |
||||||||
| 9Bh |
- |
Не реалізовано |
- |
||||||||
| 9Ch |
- |
Не реалізовано |
- |
||||||||
| 9Dh |
- |
Не реалізовано |
- |
||||||||
| 9Eh |
ADRESL |
Молодший байт результату перетворення АЦП |
хххх хххх |
||||||||
| 9Fh |
ADCON1 |
ADFM - - - PCFG3 PCFG2 PCFG1 PCFGO |
0 ------ 0000 |
||||||||
| Банк 2 |
|||||||||||
| 100h |
INDF |
Звертання до регістра, адреса якого записана в FSR (не фізичний регістр) |
0000 0000 |
||||||||
| 101h |
TMR0 |
Регістр таймера 0 |
xxxx xxxx |
||||||||
| 102h |
PCL |
Молодші біти лічильника команд PC |
0000 0000 |
||||||||
| 103h |
STATUS |
IRP RP1 RPO -ТО -PD Z DC С |
0001 Ixxx |
||||||||
| 104h |
FSR |
Регістр адреси при непрямій адресації |
xxxx xxxx |
||||||||
| 105h |
- |
Не реалізовано |
- |
||||||||
| 106h |
PORTB |
Запис у вихідну защіпку PORTB, читання стану виводів PORTB |
xxxx xxxx |
||||||||
| 107h |
- |
Не реалізовано |
- |
||||||||
| 108h |
- |
Не реалізовано |
- |
||||||||
| 109h |
- |
Не реалізовано |
- |
||||||||
| 10Ah |
PCLATH |
- |
- |
- |
Старші біти лічильника команд PC |
------- 0 0000 |
|||||
| 10Bh |
INTCON |
GIE |
PEIE |
TOIE |
INTE RBIE TOIF INTF RBIF |
0000 OOOx |
|||||
| 10Ch |
EEDATA |
Регістр даних, молодший байт |
xxxx xxxx |
||||||||
| 10Dh |
EEADR |
Регістр адреси, молодший байт |
xxxx xxxx |
||||||||
| 10Eh |
EEDATH |
- |
- |
Регістр даних, старший байт |
xxxx xxxx |
||||||
| 10Fh |
EEADRH |
- |
- |
| Регістр адреси, старший байт |
xxxx xxxx |
||||||
| Банк 3 |
|||||||||||
| 180h |
INDF |
Звертання до регістра, адреса якого записана в FSR (не фізичний регістр) |
0000 0000 |
||||||||
| 181h |
OPTION_RE |
-RBPU INTED TOCS TOSE PSA PS2 PS1 PSO |
1111 1111 |
||||||||
| 182h |
PCL |
Молодші біти лічильника команд PC |
0000 0000 |
||||||||
| 183h |
STATUS |
IRP RP1 RPO -ТО -PD Z DC С |
0001 Ixxx |
||||||||
| 184h |
FSR |
Регістр адреси при непрямій адресації |
xxxx xxxx |
||||||||
| 185h |
- |
Не реалізовано |
- |
||||||||
| 186h |
TRISB |
Напрям виводів PORTB |
1111 1111 |
||||||||
| 187h |
- |
Не реалізовано |
- |
||||||||
| 188h |
- |
Не реалізовано |
- |
||||||||
| 189h |
- |
Не реалізовано |
- |
||||||||
| 18Ah |
PCLATH |
- |
- |
- |
Старші біти лічильника команд PC |
------- 0 0000 |
|||||
| 18Bh |
INTCON |
GIE |
PEIE |
TOIE |
INTE |
RBIE |
TOIF |
INTF |
RBIF |
0000 000x |
|
| 18Ch |
EECON1 |
EEPGD |
- |
- |
- |
WREE |
WREN |
WR |
RD |
x ----- x000 |
|
| 18Dh |
EECON2 |
Регістр керування 2 (фізично не реалізований) |
|||||||||
| 18Eh |
- |
Резерв |
- |
||||||||
| 18Fh |
- |
Резерв |
- |
||||||||
Позначення: - = не використовується, читається як 0; х = не відомо.
Додаток Б– Список команд мікроконтролерів PIC16F87X
| Мнемоніка команди |
Опис |
Циклів |
14-разрядний код |
Зм. прапори |
Прим. |
| Біт 13…… ……….Біт0 |
|||||
| 1 |
2 |
3 |
4 |
5 |
6 |
| Байт орієнтовані команди |
|||||
| ADDWF f,d |
Складання W і f |
1 |
00 0111 dfff ffff |
C,DC,Z |
1,2 |
| ANDWF f,d |
Побитне ' І ' W та f |
1 |
00 0101 dfff ffff |
z |
1,2 |
| CLRF f |
Очистити f |
1 |
00 0001 1fff ffff |
z |
2 |
| CLRW |
Очистити W |
1 |
00 0001 0xxx xxxx |
z |
|
| COMF f,d |
Інвертувати f |
1 |
00 1001 dfff ffff |
z |
1,2 |
| DECF f,d |
Відняти 1 з f |
1 |
00 0011 dfff ffff |
z |
1,2 |
| DECFSZ f,d |
Відняти 1 з f і пропустити якщо 0 |
1(2) |
00 1011 dfff ffff |
1,2,3 |
|
| INCF f,d |
Додати 1 до f |
1 |
00 1010 dfff ffff |
z |
1,2 |
| INCFSZ f,d |
Додати 1 до f і пропустити якщо 0 |
1(2) |
00 1111 dfff ffff |
1,2,3 |
|
| IORWF f,d |
Побітне 'АБО' W та f |
1 |
00 0100 dfff ffff |
z |
1,2 |
| MOVF f,d |
Переслати f |
1 |
00 1000 dfff ffff |
z |
1,2 |
| MOVWF f |
Переслати W у f |
1 |
00 0000 1fff ffff |
z |
1,2 |
| NOP |
Немає операції |
1 |
00 0000 0xx0 0000 |
||
| RLF f,d |
Циклічне зрушення f вліво через перенесення |
1 |
00 1101 dfff ffff |
с |
1,2 |
| RRF f,d |
Циклічне зрушення f управо через перенесення |
1 |
00 1100 dfff ffff |
с |
1,2 |
| SUBWF f,d |
Відняти W з f |
1 |
00 0010 dfff ffff |
C,DC,Z |
1,2 |
| SWAPF f,d |
Поміняти місцями півбайти в регістрі f |
1 |
00 1110 dfff ffff |
1,2 |
|
| XORWF f,d |
Побітне “виключаюче АБО” W та f |
1 |
00 0110 dfff ffff |
z |
1,2 |
| Біт орієнтовані команди |
|||||
| BCF f,b |
Очистити біт b в регістрі f |
1 |
01 00bb bfff ffff |
1,2 |
|
| BSF f,b |
Встановити біт b в регістрі f |
1 |
01 01bb bfff ffff |
1,2 |
|
| BTFSC f,b |
Перевірити біт b в регістрі f, пропустити якщо 0 |
1(2) |
01 10bb bfff ffff |
3 |
|
Продовження додатка Б
| 1 |
2 |
3 |
4 |
5 |
6 |
|
| BTFSS f,b |
Перевірити біт b в регістрі f, пропустити якщо 1 |
1(2) |
01 11bb bfff ffff |
3 |
||
| Команди управління і операцій з константами |
||||||
| ADDLW к |
Скласти константу з W |
1 |
11 lllx kkkk kkkk |
C,DC,Z |
||
| ANDLW k |
Побітне ' І ' константи та W |
1 |
11 1001 kkkk kkkk |
Z |
||
| CALL k |
Виклик підпрограми |
2 |
10 0kkk kkkk kkkk |
|||
| CLRWDT |
Очистити WDT |
1 |
00 0000 0110 0100 |
-TO.PD |
||
| GOTO k |
Безумовний перехід |
2 |
10 1kkk kkkk kkkk |
|||
| IORLW k |
Побітне 'АБО' константи та W |
1 |
11 1000 kkkk kkkk |
Z |
||
| MOVLW k |
Переслати константу в W |
1 |
11 00xx kkkk kkkk |
|||
| RETFIE |
Повернення з підпрограми з дозволом переривань |
2 |
00 0000 0000 1001 |
|||
| RETLW k |
Повернення з підпрограми із завантаженням константи в W |
2 |
11 01xx kkkk kkkk |
|||
| RETURN |
Повернення з підпрограми |
2 |
00 0000 0000 1000 |
|||
| SLEEP |
Перейти в режим SLEEP |
1 |
00 0000 0110 0011 |
-TO.PD |
||
| SUBLW k |
Відняти W з константи |
1 |
11 110х kkkk kkkk |
C,DC,Z |
||
| XORLW k |
Побітне “виключаюче АБО” константи та W |
1 |
11 1010 kkkk kkkk |
Z |
||
Примітки:
1. При виконанні операції "читання - модифікація - запис" з портом введення/виводу початкові значення прочитуються з виводів порту, а не з вихідних защіпок. Наприклад, якщо у вихідній защіпці було записана '1', а на відповідному виході низький рівень сигналу, то назад буде записано значення '0'.
2. При виконанні запису в TMR0 (і d=1) переддільник TMR0 скидається, якщо він підключений до модуля TMR0.
3. Якщо умова істинна або змінюється значення лічильника команд РС, то інструкція виконується за два цикли. У другому циклі виконується команда NOP.
4. Опис поля операнда приведено в таблиці:
| Поле |
Опис |
| f |
Адреса регістра (від 0x00 до 0x7F) |
| w |
Робочий регістр (акумулятор) |
| b |
Номер біта у 8-разрядному регістрі |
| k |
Константа (дані або мітка) |
| X |
Не має значення (0 або1 ). Асемблер генерує х=0 |
| d |
Показник адреси результата операції: d = 0 - результат зберігається у регістрі w; |
| -TO |
Флаг переповнювання WDT |
| -PD |
Флаг скида по включенню живлення |
Додаток В–Розміщення елементів на платі PICDEM 2 PLUS
95
Додаток Г–Електрична схема плати PICDEM 2 PLUS
96
Продовження додатка Г
97
Навчальне видання
Методичні вказівки до лабораторного практикуму
з дисципліни ―Мікропроцесорні пристрої‖
(для спеціальності 7.092203 ―Електромеханічні системи автоматизації та електропривод‖) Частина 2
Укладач Олександр Михайлович Наливайко
Редактор
Підписано до друку _____________ Формат 60х84/16.
Папір офсетний Ум.др. ар._________ Обл.-вид.арк. Тираж Прим. Зам. №
Видавець і виготівник
―Донбаська державна машинобудівна академія‖
84313, м.Краматорськ, вул. Шкадінова, 72
Свідоцтво про внесення до Державного реєстру Серія ДК №1633 від 24.12.03
98