| Скачать .docx |
Реферат: Система обогрева салона автомобиля 2
Содержание
Введение…………………………………………………………………. 3
1. Разработка функциональной схемы………………………………... 4
2. Разработка принципиальной схемы………………………………... 5
3. Выбор и обоснование элементов схемы…………………………… 6
1) Микроконтроллер ATMEGA 16……………………………... 6
2) Шаговый электродвигатель FL39ST38-0504A……………… 9
3) Стабилизатор напряжения LM 7805………………………… 13
4) Интегральная микросхема L 298 ……………………………. 14
5) Дисплей DV-0802……………………………………………... 15
6) Кнопки регулирования тактовые DTS-32…………………... 15
7) Резисторы……………………………………………………… 16
8) Светодиоды…………………………………………………… 16
9) Держатели для светодиодов RTC-51………………………… 16
4. Описание работы схемы…………………………………………….. 17
Заключение……………………………………………………………… 18
Введение
В данной работе рассматривается актуальная тема – система обогрева салона автомобиля. Особенно актуальна эта тема для нашего региона – раннее наступление холодов, долгая холодная зима, всем автолюбителям хочется как можно большего комфорта и стабильной работы оборудования.
Представленная система обогрева позволяет максимально повысить комфорт владельца и пассажиров, упростить управление и предоставить точную информацию о состоянии микроклимата в автомобиле.
Приведение в исполнение данной системы является достаточно экономичным и быстрым, что позволяет сэкономить время и средства.
1. Разработка функциональной схемы
Система обогрева является сложной и многофункциональной и состоит из следующих элементов:
1) Двигатель постоянного тока со ступенчатым регулированием;
2) Дисплей с указанием:
а) температуры подаваемого воздуха;
б) скорости вращения двигателя (4 ступени);
3) Кнопка управления направлением подачи воздуха со световой индикацией «в лицо/в ноги»;
4) Кнопки управления температурой воздуха;
5) Кнопки управления скоростью двигателя;
6) Кнопка выбора забора воздуха из салона со световой индикацией (по умолчанию забор воздуха с улицы);
7) Кнопка включения/отключения отопителя.
8) Датчик температуры подаваемого воздуха
2. Разработка принципиальной схемы
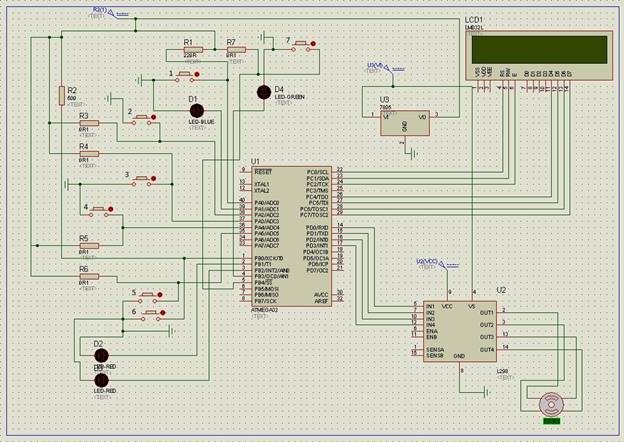
Рис. 1. Принципиальная схема
3. Выбор и обоснование элементов схемы
1) Микроконтроллер ATMEGA 16
ATMEGA16 – контроллер-конструктор для микроконтроллеров ATMEL, предназначен для макетирования устройств, проектируемых на базе 8-разрядных микроконтроллеров серии AVR фирмы ATMEL. Конструктор позволяет быстро и с небольшими затратами собрать несложный контроллер с аналоговыми/цифровыми входами/выходами и возможностью связи с внешними устройствами по интерфейсу RS-232, что является главным преимуществом контроллера перед любыми его аналогами.
ATMEGA 16 обладает следующими особенностями:
· 8-разрядный высокопроизводительный AVR микроконтроллер с малым потреблением
· Прогрессивная RISC архитектура
130 высокопроизводительных команд, большинство команд выполняется за один тактовый цикл
32 8-разрядных рабочих регистра общего назначения
· Полностью статическая работа
· Производительность приближается к 16 MIPS (при тактовой частоте 16 МГц)
· Энергонезависимая память программ и данных
16 Кбайт внутрисистемно программируемой Flash памяти (In-System Self-Programmable Flash)
Обеспечивает 1000 циклов стирания/записи
· Дополнительный сектор загрузочных кодов с независимыми битами блокировки
· Внутрисистемное программирование встроенной программой загрузки
· Обеспечен режим одновременного чтения/записи (Read-While-Write)
512 байт EEPROM
· 1 Кбайт встроенной SRAM
Программируемая блокировка, обеспечивающая защиту программных средств пользователя
· Интерфейс JTAG (совместимый с IEEE 1149.1)
Возможность сканирования периферии, соответствующая стандарту JTAG
Расширенная поддержка встроенной отладки
Программирование через JTAG интерфейс: Flash, EEPROM памяти, перемычек и битов блокировки
· Встроенная периферия
Два 8-разрядных таймера/счетчика с отдельным предварительным делителем, один с режимом сравнения
Один 16-разрядный таймер/счетчик с отдельным предварительным делителем и режимами захвата и сравнения
Счетчик реального времени с отдельным генератором
Четыре канала PWM
8-канальный 10-разрядный аналого-цифровой преобразователь
8 несимметричных каналов
7 дифференциальных каналов (только в корпусе TQFP)
2 дифференциальных канала с программируемым усилением в 1, 10 или 200 крат (только в корпусе TQFP)
Байт-ориентированный 2-проводный последовательный интерфейс
Программируемый последовательный USART
Последовательный интерфейс SPI (ведущий/ведомый)
Программируемый сторожевой таймер с отдельным встроенным генератором
Встроенный аналоговый компаратор
· Специальные микроконтроллерные функции
Сброс по подаче питания и программируемый детектор кратковременного снижения напряжения питания
Встроенный калиброванный RC-генератор
Внутренние и внешние источники прерываний
Шесть режимов пониженного потребления: Idle, Power-save, Power-down, Standby, Extended Standby и снижения шумов ADC
· Выводы I/O и корпуса
32 программируемые линии ввода/вывода
40-выводной корпус PDIP и 44-выводной корпус TQFP
· Рабочие напряжения
4,5 - 5,5 В (ATmega16)
· Рабочая частота
0 - 16 МГц (ATmega16)
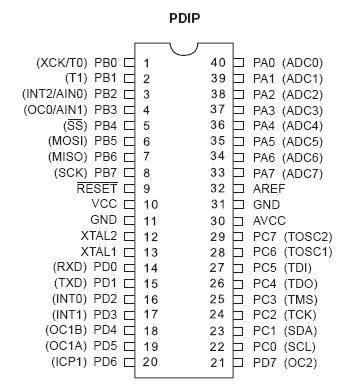
Рис. 2. Расположение выводов контроллера ATMEGA 16
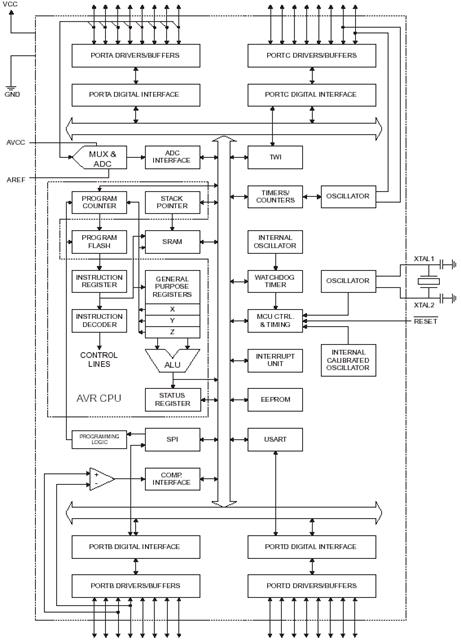
Рис. 3. Блок-схема контроллера ATMEGA 16
2) Шаговый электродвигатель FL39ST38-0504A
Шаговые двигатели – это электромеханические устройства, преобразующие сигнал управления в угловое (или линейное) перемещение ротора с фиксацией его в заданном положении без устройств обратной связи. Современные шаговые двигатели являются по сути синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным а частотным пуском шагового двигателя. Роторы могут быть возбужденными (активными) и невозбужденными (пассивными).
Принцип действия простейшего однофазного шагового двигателя.
Двухполюсный ротор из магнитомягкой стали с клювообразными выступами помещен в четырехполюсный статор (рис.4). Одна пара полюсов выполнена из постоянных магнитов, на другой – находится обмотка управления. Пока тока в обмотках управления нет, ротор ориентируется вдоль постоянных магнитов и удерживается около них с определенным усилием, которое определяется магнитным потоком полюсов Фпм. При подаче постоянного напряжения на обмотку управления возникает магнитный поток Фу примерно вдвое больший, чем поток постоянных магнитов. Под действием электромагнитного усилия, создаваемого этим потоком, ротор поворачивается, преодолевая нагрузочный момент и момент, развиваемый постоянными магнитами, стремясь занять положение соосное с полюсами управляющей обмотки. Поворот происходит в сторону клювообразных выступов, т.к. магнитное сопротивление между статором и ротором в этом направлении меньше, чем в обратном. Следующий управляющий импульс отключает напряжение с обмотки управления и ротор поворачивается под действием потока постоянных магнитов в сторону клювообразных выступов. Достоинством однофазных шаговых двигателей с постоянными магнитами является простота конструкции и схемы управления. Для фиксации ротора при обесточенной обмотке управления не требуется потребление энергии, угол поворота сохраняет свое значение и при перерывах в питании. Двигатели этого типа отрабатывают импульсы с частотой до 200-300 Гц. Их недостатки – низкий КПД и невозможность реверса.
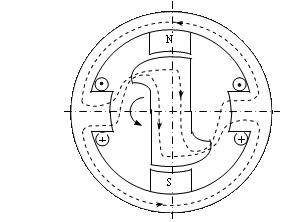
Рис. 4. Простейший однофазный шаговый двигатель
Основные параметры и характеристики шаговых двигателей.
Специфика конструкции шаговых двигателей и многообразие режимов их работы вызывают необходимость оценивать эти двигатели по следующим параметрам: частоте собственных круговых колебаний; электромагнитным постоянным времени; коэффициенту внутреннего демпфирования и характеристикам – предельным механическим и предельным динамическим. Частота собственных круговых колебаний – это угловая частота колебаний ротора около устойчивого положения при отсутствии момента нагрузки. Она является обобщенным параметром, зависящим от момента инерции J, амплитуды максимального синхронизирующего момента Mmax, числа пар полюсов p. Период собственных круговых колебаний, равный 1/w0, может служить внутренним эталоном времени. Действительно, момент инерции J определяет инерционность двигателя и механизма, амплитуда максимального синхронизирующего момента Mmax дает характеристику шагового двигателя как преобразователю энергии, число пар полюсов p определяет степень электромеханической редукции угла поворота и скорости вращения. Отношение Mmax/J дает теоретически предельное ускорение ротора шагового двигателя. Электромагнитная постоянная времени обмоток управления Tэм = L/R характеризует скорость протекания электромагнитных переходных процессов. Часто для уменьшения Тэм последовательно с обмоткой управления включают добавочное сопротивление. Уменьшать постоянную времени необходимо потому, что чем она больше, тем до меньшего значения нарастает ток за время импульса напряжения, меньше становится синхронизирующий момент, а, следовательно, и допустимый момент сопротивления. Коэффициент внутреннего демпфирования определяется отношением амплитуды потокосцепления ротора с фазой обмотки статора к ее активному сопротивлению. Этот параметр относится только к шаговым двигателям с активным ротором, поскольку его физический смысл заключается в образовании электромагнитного тормозного момента, вызванного взаимодействием поля ротора с током статора, наведенным этим полем и замыкающимся по цепи статор-источник тока. При этом механическая энергия колеблющегося ротора превращается в электрическую энергию с последующим рассеиванием ее в теплоту в активных сопротивлениях обмоток статора. Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы. С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки.
Выбранный электродвигатель обладает следующими характеристиками:
· Величина полного шага, град 1,8
· Погрешность углового шага, град ±0,09
· Погрешность сопротивления обмоток двигателя, % 10
· Погрешность индуктивности обмоток двигателя, % 20
· Напряжение питания, В 12
· Максимальное радиальное биение вала двигателя, мм 0,02
· Максимальное осевое биение вала двигателя, мм 0,08
· Максимальная допустимая осевая нагрузка на валу, Н 10
· Максимальная допустимая радиальная нагрузка на валу, Н 28
· Температурный диапазон эксплуатации от - 25ºС до +50ºС
Таблица 1 – Параметры двигателя FL39ST38-0504A
| Параметр | Рабочий ток/ фаза | Сопротивление/ фаза | Индуктивность/ фаза | Крутящий момент | Длина | Момент инерции ротора | Вес |
| Ед. измерения | А | Ом | мГн | кг*см | мм | г*cм2 | кг |
| Значение | 0,5 | 24 | 45 | 2,9 | 38 | 24 | 0,2 |
Рис. 5. Шаговые двигатели серии FL39ST
3) Стабилизатор напряжения LM 7805
Технические характеристики:
· выходное напряжение, В 5;
· номинальный ток нагрузки, А 1,0;
· максимальный ток нагрузки, А 1,2;
· минимальное входное напряжение переменного тока при номинальном токе нагрузки, не менее, В ~9;
· максимально допустимое входное напряжение переменного тока при номинальном токе нагрузки, не более, В ~18.
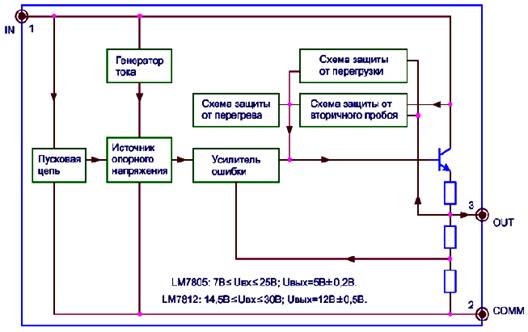
Рис. 6. Схема LM 7805
4) Интегральная микросхема L 298
В качестве силовых ключей используем микросхему L 298, т.к. ток в двигателе составляет 500 мА, напряжение питания 12 В.

Рис. 7. Схема L298
5) Дисплей DV-0802
Дисплей двухстрочный, т.к. необходимо выводить 2 параметра – скорость вращения двигателя и температуру воздуха.
Основные параметры
· тип: символьный (знакосинтезирующий)
· разрешение: 8 символов x 2 строк
· размеры модуля, мм: 58.0 x 32.0
· размер видимой области, мм: 35.0 x 15.2 (диагональ: 1.5 ″ = 3.8 см)
· размер точки, мм: 0.55 x 0.65

Рис. 8. Cегментный жк дисплей DV-0802
6) Кнопки регулирования тактовые DTS -32, высота 5 мм
Тип: прямая
Способ монтажа: в отверстия на плату
Рабочее напряжение: 12 В
Рабочий ток: 0,05 А
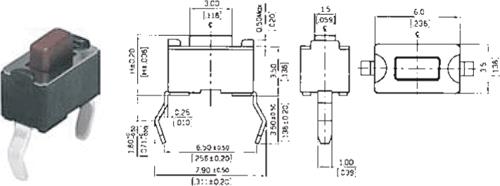
Рис. 9. Схема кнопки
7) Резисторы
· мощность: 0,5 Вт
· сопротивление по стандартному ряду Е 24: 0,5кОм

Рис. 10. Резисторы
8) Светодиоды
Для световой индикации выбираем диоды (на напряжение 12 В) TSAL 5300, диаметром 5 мм.

Рис. 11. Светодиод
9) Держатели для светодиодов RTC-51
Выбираем панельный держатель из черного пластика для 5 мм круглых светодиодов. Патрон устанавливается спереди панели, а светодиод - с задней части. Патрон имеет гибкие зацепки, которые удерживают светодиод.

Рис. 12. RTC-51
4. Описание работы схемы
1) Нажатием кнопки 1 система включается – получает питание от аккумуляторной батареи через сопротивление R1, загорается индикатор D1.
2) Кнопки 2 и 3 регулируют температуру подаваемого воздуха – увеличивают и уменьшают соответственно. Информация о заданной температуре выводится на дисплей.
3) Кнопки 4 и 5 регулируют скорость вращения двигателя. Информация о величине задания отображается на дисплее, сигнал задания через контроллер и силовые ключи L298 подается на двигатель.
4) Кнопка 6 регулирует направление подачи воздуха – в лицо, в ноги, в обоих направлениях. О выборе того или иного направления информируют индикаторы D2, D3.
5) Кнопка 7 позволяет осуществить забор воздуха из салона, по умолчанию забор производится с улицы. О выборе заданной функции – уведомляет индикатор D4.
Заключение
В ходе данной работы была разработана система обогрева салона автомобиля. В качестве основных элементов были выбраны следующие устройства:
1) Микроконтроллер ATMEGA 16
2) Шаговый электродвигатель FL39ST38-0504A
3) Стабилизатор напряжения LM 7805
4) Интегральная микросхема L 298
5) Дисплей DV-0802
6) Кнопки регулирования тактовые DTS-32
7) Резисторы 0,5 кОм
8) Светодиоды TSAL 5300
9) Держатели для светодиодов RTC-51