| Скачать .docx |
Дипломная работа: Конструювання обчислювальної техніки
Дипломна робота
конструювання обчислювальної техніки
Зміст
1. Теплові процеси в РЕЗ
1.1 Теплообмін
1.2 Передача теплової енергії теплопровідністю (кондукцією)
1.3 Теплопровідність крізь стінку
1.4 Теплопровідність вздовж стінок та стержнів
1.5 Способи збільшення теплопровідності
1.6 Передача теплової енергії конвекцією
1.6.1 Конвективна тепловіддача
1.6.2 Вільна конвекція в необмеженому просторі
1.6.3 Вільна конвекція в обмеженому просторі
1.6.4 Конвективний теплообмін при довільному тиску
1.7 Передача теплової енергії випромінюванням
1.8 Складний теплообмін
1.9 Теплові режими РЕЗ
1.9.1 Нагрівання тіла зовнішнім середовищем
1.9.2 Нагрівання тіла внутрішнім джерелом енергії
1.9.3 Розрахунок температури корпуса та нагрітої зони
1.9.4 Максимальна температура РЕЗ
1.9.5 Температура в довільній точці
1.10 Типові теплові моделі РЕЗ
1.11 Вибір загальної системи охолодження РЕЗ
2. ЕОМ як механічна система
2.1 Динамічна модель та її параметри
2.1.1 Приведення мас
2.1.2 Приведення сил
2.1.3 Приведення пружних параметрів
2.1.4 Приведення параметрів дисипації
2.2 Вільні коливання одномасової системи
2.3 Вимушені коливання при гармонічному збудженні
2.4 Коефіцієнт динамічності
2.5 Зменшення вимушених коливань
2.6 Вимушені коливання при періодичному збудженні
2.7 Коливання елементів РЕА типу балок
2.8 Коливання пластин
2.9 Віброзахист обчислювальної техніки
3. Електромагнітна сумісність радіоелектронних засобів
3.1 Проблеми електромагнітної сумісності
3.2 Джерела, приймачі та зв’язки завад
3.3 Застосування еквівалентних електричних схем
3.4 Приклад розрахунку еквівалентної схеми
3.5 Екранування
3.6 Екранування електростатичного поля
3.7 Магнітостатичне екранування
3.8 Електромагнітне екранування
3.9 Електромагнітна сумісність цифрових вузлів
Висновки
Перелік умовних позначень
Список літератури
Вступ
Конструювання є органічною складовою більш широкого процесу, який пов’язаний із розробкою технічного проекту, виробництвом і експлуатацією виробу. Процес конструювання не можна звести до окремих конструкторських рішень, прикладів та рекомендацій. Дуже важливо мати правильне й змістовне уявлення про загальні закономірності конструювання, його проблеми та перспективи. Тому конструювання обчислювальної техніки (ОТ) розглянуто як прикладну наукову дисципліну, що узагальнює методи аналізу та синтезу конструкцій ОТ.
Теорія конструювання обчислювальної техніки формується на основі вивчення та врахування тих фізичних процесів, які реально впливають на її функціональні показники. В першу чергу, це електричні, електромагнітні, теплові та механічні процеси. Ці різні за своєю фізичною природою процеси певним чином взаємопов’язані між собою. Сучасне проектування ОТ вимагає системного підходу, при якому всі фізичні процеси розглядаються у взаємодії. Такий підхід потребує створення складних фізичних та математичних моделей.
Електрична енергія, яку споживає радіоелектронний засіб (РЕЗ), неминуче перетворюється в теплову. При цьому елементи РЕЗ нагріваються і погіршують свої характеристики. Боротьба з перегрівом особливо актуальна в умовах мініатюризації, що потребує детального аналізу трьох видів теплообміну: теплопровідності, конвекції, випромінювання. В багатьох випадках передача тепла відбувається через плоскі й циліндричні стінки, при цьому важливими є способи збільшення теплопровідності. У випадку складних теплових режимів нормальна робота приладів можлива завдяки використанню систем охолодження.
При певних обставинах на базі пружних елементів в ЕОМ можуть виникати та розвиватись механічні коливання. Для визначення рівня коливань складається відповідна динамічна модель. Динамічна модель – ідеалізований в межах поставленої задачі об’єкт з певними характеристиками у вигляді інерційних, пружних, дисипативних та силових параметрів. Важливим питанням є віброзахист обчислювальної техніки, який реалізується завдяки застосуванню різних видів амортизаторів.
Електромагнітна сумісність – здатність виробів нормально функціонувати поруч з іншими виробами в умовах дії між ними та на них додаткових електромагнітних полів при виготовлені та експлуатації. Тому для надійної роботи приладів важливими є способи зменшення завад, екранування електростатичного, магнітного та електромагнітного поля.
1. Теплові процеси в РЕЗ
1.1 Теплообмін
Електрична енергія, яку споживає РЕЗ, неминуче перетворюється в теплову [1, 2]. При цьому елементи РЕЗ нагріваються і погіршують свої характеристики. Боротьба з перегрівом особливо актуальна в умовах мініатюризації. Існують два принципово різні методи боротьби з перегрівом:
- зменшення споживаної енергії, яка перетворюється в теплову;
- інтенсифікація тепловідведення з РЕЗ у навколишнє середовище.
Для успішного розв’язку проблеми треба вивчити процеси теплообміну.
Теплообмін – це процес переносу теплової енергії із однієї частини середовища в іншу. Важливо, що теплообмін – необоротний процес. Він визначається різницею температур і проходить в напрямку зменшення температури. Як правило, цей процес іде з середини апарату в зовнішнє середовище.
Розрізняють три види теплообміну [1-3]:
· теплопровідність – молекулярний чи електронний процес переносу тепла в суцільному середовищі;
· конвекція – перенесення тепла, пов’язане з макропереміщенням об’ємів рідин та газів;
· випромінювання (радіація) – це явище переносу енергії у вигляді електромагнітних хвиль.
Незалежно від виду теплообміну, тобто незалежно від механізму теплового процесу, його описують за допомогою аналітичного виразу, який має однакову лінійну форму.
Позначимо:
Q – кількість тепла, Дж;
Ф – тепловий потік, Вт.
В такому випадку має місце диференціальна залежність:
![]() , (1.1)
, (1.1)
де τ – час.
Між різницею температур (перегрівом θ) і тепловим потоком має місце залежність
![]() , (1.2)
, (1.2)
де R12 – коефіцієнт пропорціональності, який залежить від природи та стану середовища, а також від механізму теплового процесу. В загальному випадку це складна функція, але досить часто R12 - константа. По аналогії з електричними колами R12 називають тепловим опором.
1.2 Передача теплової енергії теплопровідністю (кондукцією)
Мова йде про передачу тепла в твердих тілах, нерухомих рідинах і газах, коли температура їх окремих ділянок різна. На рис.1.1. зображені ізотермічні поверхні та лінії теплового потоку.
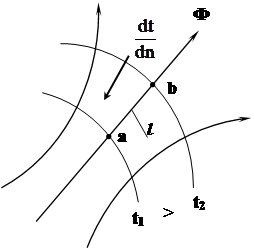 |
Рис.1.1. Ізотермічні поверхні та лінії теплового потоку
Основним законом теплопровідності є закон Фур’є:
![]() , (1.3)
, (1.3)
де q – поверхнева густина теплового потоку, ![]() ;
;
![]() - температурний градієнт,
- температурний градієнт, ![]() ;
; ![]() - теплопровідність,
- теплопровідність, ![]() .
.
У диференціальній формі зв’язок між тепловим потоком і поверхневою густиною теплового потоку має вигляд
![]() , (1.4)
, (1.4)
де dА – елементарна площа ізотермічної поверхні, через яку проходить тепловий потік.
Якщо тепловий потік однорідний (q=const), то
![]() . (1.5)
. (1.5)
Виведемо формулу для визначення теплового опору, якщо тепловий потік однорідний. З (1.3) та (1.5) слідує, що
![]() .
.
Враховуючи останнє рівняння, з формули (1.2) одержимо:
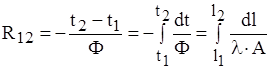 .
.
Дуже часто ![]() . Тоді це рівняння прийме вигляд:
. Тоді це рівняння прийме вигляд:
 . (1.6)
. (1.6)
З допомогою формули (1.6), виходячи з геометричних особливостей тіла та знаючи коефіцієнт теплопровідності матеріалу λ, можемо визначити тепловий опір ділянки. Знаючи тепловий опір R12 та перегрів θ12, із формули (1.2) одержуємо робочу формулу для визначення теплового потоку на заданій ділянці:
 , (1.7)
, (1.7)
де ![]() - тепловий опір ділянки,
- тепловий опір ділянки, ![]() ;
;
![]() - теплова провідність ділянки,
- теплова провідність ділянки, ![]() ;
;  ;
;
![]() - перепад температур (перегрів).
- перепад температур (перегрів).
1.3 Теплопровідність крізь стінку
Стінки є досить розповсюдженими елементами конструкцій обчислювальної техніки. Тепловий опір стінок можна визначати незалежно від умов роботи конструкції та робочих режимів. Розглянемо найбільш типові випадки та виведемо розрахункові формули для визначення теплового опору.
Однорідна поперечна плоска стінка
На рис.1.2. зображена однорідна плоска стінка товщиною δ. Через неї в поперечному напрямку протікає однорідний тепловий потік Ф у напрямі зменшення температури; при цьому ti - температура лівої поверхні стінки, tj - температура правої поверхні стінки, ti > tj.
Теплове коло є тепловим опором Rij з температурними потенціалами на кінцях ti, tj. Формула (1.6) у даному випадку набуде вигляду:
 .
.
 |
а) б)
Рис. 1.2. Однорідна поперечна плоска стінка (а) та її теплова модель (б)
Остаточно запишемо її так:
![]() . (1.8)
. (1.8)
Отже, тепловий опір пропорційний товщині стінки δ і обернено пропорційний її площі А та теплопровідності матеріалу λ.
Циліндрична стінка
Нехай однорідний тепловий потік Ф напрямлений у напрямку зовнішньої стінки (рис.1.3).
 |
Рис.1.3. Циліндрична стінка
Хоча теплове коло, як і в попередньому випадку, складається з одного теплового елемента Rij, розрахункова формула буде іншою. В даному випадку площа поверхні, через яку проходить тепловий потік Ф, є функцією ![]() . Тому формула (1.6) набуває вигляду
. Тому формула (1.6) набуває вигляду
 .
.
Остаточно запишемо її так:
 . (1.9)
. (1.9)
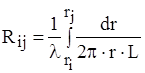
Поперечна багатошарова стінка
На рис.1.4 зображена поперечна стінка, що складається з трьох шарів. Незмінний однорідний тепловий потік Ф послідовно проходить через кожний шар як через однорідну поперечну стінку площею А.
 |
а) б)
Рис.1.4. Поперечна багатошарова стінка площею А (а) та її теплова модель (б)
Теплове коло є послідовним з’єднанням теплових опорів кожного шару. Тепловий опір всієї стінки визначається як сума теплових опорів елементів. У загальному випадку розрахункова формула набуває вигляду:
 . (1.10)
. (1.10)
Поздовжня багатошарова стінка
Всі шари стінки мають однакову товщину δ (рис.1.5).
 |
 |
а) б)
Рис.1.5. Поздовжня багатошарова стінка (а) та її теплова модель (б)
Тепловий потік Ф розподіляється між кожним шаром стінки площею Аk. Кожний шар має свою теплопровідність матеріалу λk. Через поверхню площею Аk проходить тепловий потік Фk, при цьому  . Теплове коло є паралельним з’єднанням теплових опорів кожного шару. Тепловий опір всієї стінки знайдемо по аналогії з визначенням опору електричного кола. Одержимо розрахункову формулу
. Теплове коло є паралельним з’єднанням теплових опорів кожного шару. Тепловий опір всієї стінки знайдемо по аналогії з визначенням опору електричного кола. Одержимо розрахункову формулу
 . (1.11)
. (1.11)
1.4 Теплопровідність вздовж стінок та стержнів
Особливістю стержнів та пластин є одновимірний характер розповсюдження тепла. Тепловий потік у стержні рухається вздовж його осі, а в стінці – вздовж стінки. В поперечному напрямку температурний градієнт набагато менший, ніж уздовж стінки чи стержня. До стержнів можна віднести провідники, електроди термопар, тощо. До пластин можна віднести робочий елемент напівпровідникового випрямляча радіаторного типу, окреме ребро радіатора, шасі, на якому змонтовані деталі, тощо.
На рис.1.6 зображений стержень, вздовж якого рухається тепловий потік Ф
 |
Рис.1.6. Тепловий потік стержня
Хоча тепловий потік рухається вздовж стержня, його інтенсивність падає, бо має місце віддача тепла з бокової поверхні стержня в оточуюче середовище. Тому, якщо на початку температура бокової поверхні стержня дорівнювала tm, то в кінці стержня вона падає до значення tk. Якщо L таке, що tk=tC (Фk=0), то для довільного перерізу з координатою х має місце формула:
 , (1.12)
, (1.12)
де А – площа поперечного перерізу;
U – периметр поперечного перерізу;
 ;
;
α - коефіцієнт тепловіддачі бокової поверхні стержня;
λ - теплопровідність матеріалу;
 ,
,  .
.
1.5 Способи збільшення теплопровідності
Ефективна робота теплопроводів визначається не тільки їх геометрією, але й властивостями матеріалу. В першу чергу мова піде про теплопровідність λ, яка входить у всі наведені раніше розрахункові формули кондуктивної теплопередачі.
Матеріал зі значенням теплопровідності ![]() вважається теплопровідним. Тобто такі матеріали в загальному випадку здатні забезпечити відвід тепла від нагрітого елемента, запобігаючи його перегріву. Матеріали зі значенням теплопровідності
вважається теплопровідним. Тобто такі матеріали в загальному випадку здатні забезпечити відвід тепла від нагрітого елемента, запобігаючи його перегріву. Матеріали зі значенням теплопровідності ![]() вважаються теплоізоляційними. Розглянемо теплопровідності основних видів матеріалів більш детально.
вважаються теплоізоляційними. Розглянемо теплопровідності основних видів матеріалів більш детально.
Теплопровідність газів лежить у межах: ![]() (тільки у гелію і водню ці значення у п’ять разів більші). З ростом абсолютної температури Т їх теплопровідність зростає практично лінійно.
(тільки у гелію і водню ці значення у п’ять разів більші). З ростом абсолютної температури Т їх теплопровідність зростає практично лінійно.
Теплопровідність рідин лежить в межах ![]() . Проте якщо в асоційованих рідинах (вода та ін.) з ростом Т значення λ зростають згідно параболічного закону, то у неасоційованих рідин (бензол та ін.) з ростом Т значення λ падають згідно параболічного закону.
. Проте якщо в асоційованих рідинах (вода та ін.) з ростом Т значення λ зростають згідно параболічного закону, то у неасоційованих рідин (бензол та ін.) з ростом Т значення λ падають згідно параболічного закону.
Теплопровідність металів лежить в межах ![]() . У чистих металах при зростанні Т значення λ падає згідно параболічного закону, у сплавах – зростає лінійно.
. У чистих металах при зростанні Т значення λ падає згідно параболічного закону, у сплавах – зростає лінійно.
Значення теплопровідності діелектриків лежить в межах ![]() . З ростом абсолютної температури Т значення λ зростає майже параболічно.
. З ростом абсолютної температури Т значення λ зростає майже параболічно.
Особливе місце займають алмази (природні і штучні). Вони мають особливо високу теплопровідність ![]() . Це визначає їх широке застосування в електронній техніці (напівпровідникові прилади, інтегральні мікросхеми, тощо). Алмази дозволяють зменшити теплові опори між кристалами та корпусом.
. Це визначає їх широке застосування в електронній техніці (напівпровідникові прилади, інтегральні мікросхеми, тощо). Алмази дозволяють зменшити теплові опори між кристалами та корпусом.
Для зменшення теплового навантаження елементів електронних приладів потрібно:
· використовувати матеріали з високим значенням λ;
· збільшувати площу контакту елементів теплопроводів;
· зменшувати шляхи теплопотоків.
Для цього потрібно знімати з контактів лаки, фарби, зменшувати шорсткість поверхонь і збільшувати тиск між ними, в якості прокладок використовувати пасти високої провідності, застосовувати шини між елементами і корпусом, замінювати гумові прокладки на свинцеві, застосовувати самонарізні гвинти.
В якості теплопровідних найбільше застосування знайшли такі матеріали:
· мідь і алюміній для зниження контактного опору;
· кадмій і олово для покриття елементів;
· свинець, мідь, алюміній для виготовлення прокладок.
1.6 Передача теплової енергії конвекцією
1.6.1 Конвективна тепловіддача
Мова йде про передачу тепла з поверхні твердого тіла в газ або рідину, які переміщуються відносно поверхні. Цей процес суттєво залежить від стану нагрітого середовища. Конвекція завжди супроводжується теплопровідністю
![]() ,
,
де q- поверхнева густина теплового потоку;
![]() - теплопровідна складова;
- теплопровідна складова;
![]() - конвективна складова.
- конвективна складова.
Якщо швидкість переміщення V газу чи рідини відносно поверхні тіла падає до нуля, то ![]() . Якщо ж ця швидкість досягає високих значень, то
. Якщо ж ця швидкість досягає високих значень, то ![]() . У більшості практичних задач
. У більшості практичних задач ![]() .
.
Процес конвекції формально (математично) зводиться до процесу теплообміну (тіло - рідина). Цей процес називається конвективною тепловіддачею та виражається формулою Ньютона:
![]() , (1.13)
, (1.13)
де А - площа поверхні тепловіддачі;
![]() - конвективна теплопровідність,
- конвективна теплопровідність, ![]() ;
;
![]() - коефіцієнт конвективної тепловіддачі,
- коефіцієнт конвективної тепловіддачі, ![]() .
.
Формула Ньютона виглядає як лінійна функція, але справа в тому, що коефіцієнт конвективної тепловіддачі складним чином суттєво залежить від багатьох теплофізичних та гідродинамічних факторів. Коефіцієнт конвективної тепловіддачі розглянемо як функцію
![]() , (1.14)
, (1.14)
де ![]() - температура тіла;
- температура тіла;
![]() - температура середовища;
- температура середовища;
![]() - коефіцієнт термічного розширення середовища;
- коефіцієнт термічного розширення середовища;
![]() - теплопровідність середовища;
- теплопровідність середовища;
![]() - теплоємність середовища;
- теплоємність середовища;
![]() - коефіцієнт динамічної в’язкості середовища;
- коефіцієнт динамічної в’язкості середовища;
![]() - густина середовища;
- густина середовища;
![]() - визначальний розмір тіла;
- визначальний розмір тіла;
![]() - прискорення земного тяжіння.
- прискорення земного тяжіння.
В залежності від конкретних умов (1.14) може набути досить простого вигляду. Теорія подібності дає ряд критеріїв, які дозволяють класифікувати задачу визначення αK по значеннях цих критеріїв. Формула (1.14) в залежності від конкретних умов набуває декількох характерних форм, кожна з яких значно простіша базової формули.
1.6.2 Вільна конвекція в необмеженому просторі
Значення αK в першу чергу залежить від стану граничного шару рідини. Для тіл з одним визначальним розміром L (вертикальні плити, стінки, довгі провідники) широкого застосування набула емпірична формула:
![]() ,
,
деPr- число Прантля,  ,
,  ;
;
Gr- число Грасгофа,  ;
;
Nu- число Нуссельта, ![]() ;
;
c, n – емпіричні коефіцієнти;
m – індекс, який означає, що фізичні параметри рідини беруться для середньої температури
 . (1.15)
. (1.15)
В залежності від значення комплексного критерію ![]() розрізняють чотири типових ситуації, які характеризуються певним режимом руху рідини та значеннями С і n (таблиця 1.1).
розрізняють чотири типових ситуації, які характеризуються певним режимом руху рідини та значеннями С і n (таблиця 1.1).
Таблиця. 1.1.
Режими руху рідини
| № | Значення |
c | n | Режим руху рідини |
| 1 | 0,5 | 0 | Плівковий | |
| 2 | 1,18 | 1/8 | Перехідний до ламінарного | |
| 3 | 0,54 | 1/4 | Ламінарний | |
| 4 | 0,135 | 1/3 | Турбулентний |
Формула (1.15) універсальна в тому розумінні, що стосується різних середовищ (повітря, водень, вуглекислий газ, мастила тощо). Нас ця формула цікавить з точки зору застосування до електронних схем, тобто коли середовищем є повітря.
Форма поверхонь тіл зводиться до трьох базових поверхонь: площина, сфера, циліндр.
Ці поверхні характеризуються одним визначальним розміром L та орієнтацією поверхні в середовищі (повітрі). Орієнтація характеризується значенням параметра N. Основні випадки орієнтації поверхні наведемо у вигляді таблиці 1.2.
Чотири характерні режими конвективної тепловіддачі пов’язують зі значенням емпіричного індексу n і називають законом ступеня n. Розглянемо кожний з чотирьох законів та дамо відповідні формули визначення конвективної тепловіддачі.
Таблиця 1.2.
Орієнтація поверхні в середовищі
| № | Поверхня та орієнтація | L | N |
| 1 |
Горизонтальний циліндр |
d – діаметр |
1,0 |
| 2 |
Вертикальна пластина чи циліндр |
H – висота |
1,0 |
| 3 |
б) верхня площина |
Lmin - мінімальний розмір площини | 0,7 1,3 |


 Горизонтальна пластина:
Горизонтальна пластина: а) нижня площина
а) нижня площинаЗакон ступеня нуль. Біля поверхні тіла утворюється майже нерухома плівка нагрітого повітря. Теплообмін відбувається практично за рахунок теплопровідності. Такий режим теплообміну має місце при незначних перепадах температур (θ=Т-ТС) для тіл з малими розмірами та плавними формами.
Закон ступеня 1/8. Такий закон має місце при відносно невеликих перепадах температур для тіл з малими розмірами та різкими формами. Наприклад, при охолодженні тонких довгих стержнів. Режим руху теплоносія - перехідний до ламінарного. Інтенсивність теплообміну незначна. Має місце формула:
 , (1.16)
, (1.16)
де d - діаметр стержня;
![]() . (1.17)
. (1.17)
Закон ступеня 1/4. При цьому законі на поверхні тіла відбувається ламінарний рух. Здійснюється значний конвективний теплообмін. Така картина спостерігається біля ребер радіаторів, на поверхні плоских та циліндричних апаратів середнього розміру. Має місце формула:
 , (1.18)
, (1.18)
де L - визначальний розмір, м;
N - параметр, що визначає орієнтацію тіла;
![]() . (1.19)
. (1.19)
Закон ступеня 1/3. При цьому законі на поверхні тіла відбувається інтенсивний турбулентний рух теплоносія і відбувається інтенсивний теплообмін. Коефіцієнт конвективної тепловіддачі визначається за формулою
![]() , (1.20)
, (1.20)
![]() . (1.21)
. (1.21)
Для визначення коефіцієнта а3 можна скористатись спеціальною таблицею.
Найбільш часто зустрічаються саме закони ступеня 1/4 та 1/3. Тому особливого значення для плоских і циліндричних поверхонь набуває спосіб швидкого визначення ступеня n:
![]() якщо
якщо  , то n=1/4;
, то n=1/4;
якщо  , то n=1/3, (1.22)
, то n=1/3, (1.22)
де визначальний розмір L береться в м.
Приклад 1.1. Корпус електричного приладу (рис.1.7) має розмір паралелепіпеда L1 = 0,3 м, L2 =0,4 м, Н = 0,2 м, ![]() . Знайти теплову потужність корпусу при конвективній тепловіддачі.
. Знайти теплову потужність корпусу при конвективній тепловіддачі.
 |
 |
а) б)
Рис.1.7. Корпус приладу та його теплова модель
Через грані паралелепіпеда паралельно протікають шість теплових потоків. Оскільки бокові поверхні мають однаковий визначальний розмір і розташовані вертикально, то їх можна об’єднати в одну поверхню. Теплове коло (рис.1.7 б) є паралельним з’єднанням трьох теплових опорів: Rбок, Rкр, Rдно.
Конвективна провідність системи визначається як сума трьох провідностей:
![]() ,
,
де
Розглянемо дно і кришку:
 ;
; ![]() ;
;
![]() , тому n=1/4.
, тому n=1/4.
Оскільки визначальні розміри бокових граней менші визначального розміру дна і кришки, то теплообмін по всіх гранях має ступінь n=1/4. Отже маємо такі дані для визначення коефіцієнтів конвективної тепловіддачі бокових граней, кришки та дна відповідно:


![]() .
.
Згідно формули (1.18) та формули (1.19)
 ;
;
 ;
;
 .
.
Отже:
![]()
![]() .
.
Теплова потужність при конвективній тепловіддачі
![]() .
.
1.6.3 Вільна конвекція в обмеженому просторі
Мова йде про тонкий повітряний прошарок, що розміщений між двома близько розташованими площинами (рис.1.8). Складний процес в обмеженому замкнутому просторі прийнято розглядати по аналогії з передачею тепла кондуктивним способом. Це дозволяє уникнути визначення коефіцієнтів конвективної тепловіддачі. У зв’язку з цим користуються ефективним коефіцієнтом тепловіддачі.
У випадку, коли товщина прошарку набагато менша розмірів l1 та l2 (δ<<{l1, l2}), ефективний коефіцієнт тепловіддачі визначається формулою:
 .
.
 |
Рис.1.8. Тонкий повітряний прошарок
Для повітряних прошарків добуток a2∙λ в широкому діапазоні температур залишається практично сталим і рівним 0,45. Тому:
 . (1.23)
. (1.23)
У випадку, коли товщина прошарку δ співрозмірна з розмірами l1 та l2 (δ<{l1, l2}), ефективний коефіцієнт тепловіддачі прошарку визначається формулою
 , (1.24)
, (1.24)
де  ,
, ![]() (1.25)
(1.25)
Значення В вибирається для середньої температури згідно таблиці 1.3.
Таблиця 1.3.
Значення коефіцієнта В
| 0 | 50 | 100 | 200 | |
| B | 0,63 | 0,58 | 0,56 | 0,44 |
1.6.4 Конвективний теплообмін при довільному тиску
Досі в усіх формулах передбачалося, що тиск середовища нормальний, тобто ![]() Па (760 мм. рт. ст.) Насправді, тиск впливає на значення коефіцієнта тепловіддачі. Якщо
Па (760 мм. рт. ст.) Насправді, тиск впливає на значення коефіцієнта тепловіддачі. Якщо ![]() , то
, то
 або
або  , (1.26)
, (1.26)
де n – ступінь закону теплообміну (n=0, n=1/8, n=1/4, n=1/3).
Отже, вплив тиску можна врахувати після того, як визначені коефіцієнти конвективної тепловіддачі при нормальному тиску.
1.7 Передача теплової енергії випромінюванням
Будь-яке тіло випромінює світлову енергію у вигляді електромагнітних хвиль широкого частотного спектру. Має місце формула:
![]() , (1.27)
, (1.27)
де αВ - коефіцієнт теплопередачі випромінювання.
![]() , (1.28)
, (1.28)
де ![]() - приведена ступінь чорноти;
- приведена ступінь чорноти;
![]() - кутовий коефіцієнт, що показує, яка частина випромінюваної енергії тіла i попадає на тіло j. В багатьох задачах, що стосуються радіоелектронних виробів, можна прийняти
- кутовий коефіцієнт, що показує, яка частина випромінюваної енергії тіла i попадає на тіло j. В багатьох задачах, що стосуються радіоелектронних виробів, можна прийняти ![]() ; f(ti, tj) - функція температур першої поверхні i та другої поверхні j. Згідно закону Стефана-Больцмана значення цієї функції можна обчислити за формулою
; f(ti, tj) - функція температур першої поверхні i та другої поверхні j. Згідно закону Стефана-Больцмана значення цієї функції можна обчислити за формулою
 , (1.29)
, (1.29)
де с0 - стала Больцмана, с0 = 5,67 .
.
Значення функції f(ti, tj) зручно визначати з допомогою спеціальної таблиці. Потрібно знати, що при підвищенні температури доля теплової енергії, що випромінюється, збільшується і перевищує конвективну складову.
1.8 Складний теплообмін
Незалежно від виду теплообміну використовується одна розрахункова формула:
 . (1.30)
. (1.30)
Індекс m вказує на механізм переносу тепла: при індукції m≡т, при конвективному теплообміні m≡к та m≡в при випромінюванні. Тому в загальному випадку при наявності всіх трьох теплових процесів
![]() . (1.31)
. (1.31)
Вважаємо, що всі три види теплових процесів протікають паралельно і незалежно.
1.9 Теплові режими РЕЗ
1.9.1 Нагрівання тіла зовнішнім середовищем
Будемо розрізняти два типи температурних режимів:
1) стаціонарний – при якому температурне поле РЕЗ не змінюється з часом τ;
2) нестаціонарний – поле РЕЗ змінюється з часом.
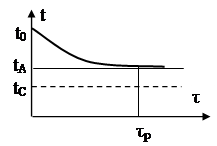
Нехай в тілі довільної форми температура всіх точок однакова. Внутрішні джерела енергії відсутні. Тіло з температурою ![]() переноситься в середовище з температурою
переноситься в середовище з температурою ![]() .
.
Різниця температури тіла і температури середовища змінюється з часом по експоненційному закону (рис.1.9)
 |
 |
а) б)
Рис.1.9. Графік зміни температури при tc=const, Ф=0
Має місце залежність:
![]() , (1.32)
, (1.32)
де m0 – деяка стала, яку називають темпом охолодження або нагрівання тіла, 1/c.
При ![]() , тобто існує сталий режим, який називається регулярним режимом першого роду. З деякого часу
, тобто існує сталий режим, який називається регулярним режимом першого роду. З деякого часу ![]() значення
значення ![]() і режим стає практично сталим.
і режим стає практично сталим.
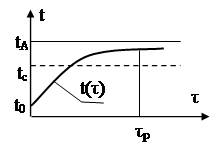
1.9.2 Нагрівання тіла внутрішнім джерелом енергії
Нехай елементи РЕЗ виділяють тепло, яке утворює тепловий потік потужністю Ф, ![]() . При
. При ![]() наступає стаціонарний режим (рис.1.10). Температура тіла стає рівною
наступає стаціонарний режим (рис.1.10). Температура тіла стає рівною
 ,
,
де ![]() .
.
Має місце формула аналогічна формулі (1.32):
![]() . (1.33)
. (1.33)
 |
 |
а) б)
Рис.1.10. Графік зміни температури при tc=const, Ф=const
1.9.3 Розрахунок температури корпуса та нагрітої зони
Середній тепловий потік Ф, що проходить через корпус в оточуюче середовище, практично дорівнює потужності Р, яку споживає електронний пристрій і яка задана. При цьому відомою вважаємо температуру середовища tc, а потрібно знайти температуру корпусу tк. Перегрів корпус – середовище ![]() відповідає потоку Ф згідно формули
відповідає потоку Ф згідно формули
![]() . (1.34)
. (1.34)
Поверхня корпуса приймається ізотермічною поверхнею і тому процес випромінювання однаковий по всій поверхні корпуса площею А. Конвективна тепловіддача здійснюється по різному через бокові грані площею Аб, кришку і дно площею Ак. Перегрів θкс – величина невідома. Коефіцієнт тепловіддачі можна визначити, якщо заданий перегрів θкс. Отже температуру корпусу tk можна визначити, якщо знайти перегрів θКС. Значення θКС шукають з допомогою теплової характеристики Ф=Ф(θКС), яку попередньо треба побудувати. Графік Ф(θКС) проходить через початок координат: Ф(0)=0. Для побудови графіка (рис.1.11) знаходимо ще дві точки, бо графік дещо відрізняється від лінійного. Спочатку задаємось значенням перегріву θ1. Тоді згідно формули (1.34) можемо знайти значення теплового потоку Ф1, який для даного РЕЗ може забезпечити цей перегрів θ1. Значення θ1 та Ф1 визначить точку 1 теплової характеристики. Задавшись значенням θ2 та повторивши розрахунки для визначення Ф2, знайдемо точку 2. Звичайно графік теплової характеристики будується на міліметровому папері в масштабі по координатним осям. Оскільки задана потужність Р, яку споживає РЕЗ, то з допомогою графіка знаходимо справжній перегрів θКС. Після цього знаходимо температуру корпуса
![]() .
.
 |
Рис.1.11. Теплова характеристика корпус-середовище
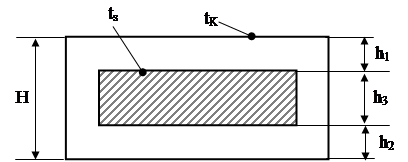
Знаючи температуру корпуса tK можна перейти до визначення температури нагрітої зони tS. Нагріта зона – простір, обмежений умовною ізотермічною поверхнею, яка зміщена в середину корпуса на певну відстань. Товщина повітряного прошарку δ між корпусом і поверхнею нагрітої зони задається в залежності від типу теплової моделі РЕЗ. На рис.1.12, а зображена нагріта зона герметичного РЕЗ з горизонтальним шассі. Нагріті елементи, що змонтовані на шассі, утворюють нагріту зону. Температура поверхні нагрітої зони tS. Тепловіддача від нагрітої зони до корпусу здійснюється через прошарок. Товщина прошарків h1 і h2 співрозмірна з розмірами нагрітої зони, тому ефективні коефіцієнти тепловіддачі визначаються за формулою (1.24).
Для РЕЗ касетного типу (рис.1.12, б) нагріта зона з корпусом утворює тонкі прошарки товщиною δ. Тому ефективні коефіцієнти тепловіддачі визначаються за формулою (1.23).
 |
 а)
а)
б)
Рис.1.12. Нагріта зона РЕЗ з горизонтальним шассі (а) та касетного типу (б)
Температура поверхні нагрітої зони tS визначається з допомогою теплової характеристики зона – корпус. Ця теплова характеристика знаходиться аналогічно тепловій характеристиці корпус – середовище згідно формулі (1.34). В результаті знаходиться перегрів θSK і визначається температура нагрітої зони tS = tK - θSK.
1.9.4 Максимальна температура РЕЗ
Дуже важливо знайти саме максимальну температуру нагрітої зони. Припускаємо, що джерела теплової енергії розподілені в нагрітій зоні рівномірно по всьому об’єму. Це припущення дозволяє вважати, що максимальною є температура в центрі нагрітої зони, тобто в центрі паралелепіпеда.
Максимальна температура визначається формулою
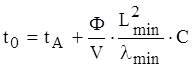 , (1.35)
, (1.35)
де V - об’єм нагрітої зони, V = LxLyLz(рис.1.13);
С - безрозмірний коефіцієнт.
Формулу (1.35) розглянемо спочатку для РЕЗ касетного типу. Нагріта зона апаратів цього типу вважається анізотропним тілом з різними теплопровідностями вздовж координатних осей: λx, λy, λz.
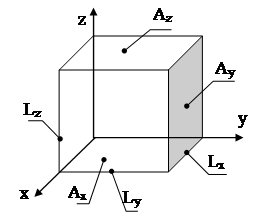 |
Рис.1.13. Нагріта зона
Значення Lmin та λmin визначаються особливим чином. Дамо алгоритм пошуку Lmin, який є одним з розмірів L1, L2 чи h.
1. Нехай Lmin=Lx. Тоді  ,
,  . Якщо при цьому виконується умова Lx<L1 та Lx<L2, то дійсно Lmin=Lx, а λmin= λx. Якщо ця умова не виконується, то пошук продовжується.
. Якщо при цьому виконується умова Lx<L1 та Lx<L2, то дійсно Lmin=Lx, а λmin= λx. Якщо ця умова не виконується, то пошук продовжується.
2. Нехай тепер Lmin=Ly. Тоді  ,
,  . Якщо при цьому виконується умова Ly<L1 та Ly<L2, то дійсно Lmin=Ly, а λmin= λy. Якщо ж умова знову не виконується, то Lmin=Lzі λmin= λz.
. Якщо при цьому виконується умова Ly<L1 та Ly<L2, то дійсно Lmin=Ly, а λmin= λy. Якщо ж умова знову не виконується, то Lmin=Lzі λmin= λz.
Тепер можна визначити й коефіцієнт С, який є функцією
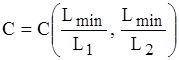 .
.
Цю функцію реалізовано у вигляді системи графіків (рис.1.14). Визначивши значення Lmin/L1 та Lmin/L2, знайдемо на відповідній кривій точку Lmin/L2 з абсцисою Lmin/L1. Ордината цієї точки є значенням коефіцієнта С.
Задача визначення коефіцієнта С для РЕЗ з горизонтальним шассі набагато простіша. Нагріта зона в цьому випадку ізотропне тіло, у якого λx=λy=λz=λ=λmin. Розмір Lmin визначається як мінімальний з трьох розмірів {Lx, Ly, Lz}. Значення С знаходимо за допомогою графіків (рис.1.14).
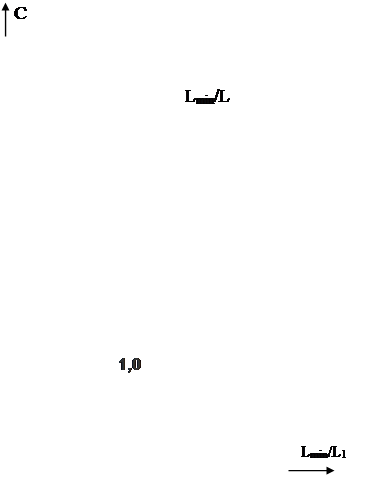

Рис.1.14. Графік для визначення коефіцієнта С
1.9.5 Температура в довільній точці
Щоб визначити температуру довільної точки В нагрітої зони потрібно з центру О нагрітої зони через точку В провести промінь до перетину з поверхнею нагрітої зони в точці А (рис.1.15).
 |
Рис.1.15. Температура довільної точки
Температуру на кінцях відрізка АВ вважаємо визначеною. Приймаємо, що вздовж цього відрізка температура змінюється лінійно. Тоді температура в точці В
 . (1.36)
. (1.36)
1.10 Типові теплові моделі РЕЗ
Теплові процеси в РЕЗ досить складні і тому піддаються лише наближеному математичному опису. Теплова модель повинна бути якомога простішою, але при цьому вона повинна відображати найбільш суттєві теплові властивості конструкції РЕЗ. Велику різноманітність теплових моделей можна звести до двох типів:
1) моделі, що мають виділену нагріту зону, поверхня якої є ізотерма. Такі моделі відповідають або апаратам з відносно великими деталями на шасі (рис. 1.16, а), або апаратам з великим проміжком (рис. 1.16, б).
2) моделі, весь об’єм яких є умовна теплова зона. Відповідають апаратам з щільним компонуванням. Сукупність касет ідеалізується як однорідне тіло з теплопровідностями ![]() (рис. 1.16, в).
(рис. 1.16, в).

Рис. 1.16. Типи теплових моделей
На базі цих двох основних типів моделей описуються певні теплові процеси в залежності від того, яка система забезпечення теплового режиму використовується.
Нормальний тепловий режим РЕЗ забезпечується спеціальними пристроями – системами забезпечення теплового режиму (СЗТР). СЗТР підрозділяються на дві великі групи – системи охолодження (СО) та системи термостабілізації (СТ). Системи охолодження можуть мати загальне або локальне призначення. Розглянемо способи охолодження РЕЗ, що визначають основні типи СО [1-8].
Вільне повітряне охолодження. Цей спосіб не потребує спеціальних пристроїв, найбільш простий, економний і надійний, бо не потребує додаткової енергії. Розрізняють дві основні схеми вільного повітряного охолодження РЕЗ: герметичні РЕЗ ( рис. 1.16) та перфоровані РЕЗ (рис. 1.17).


а) б)
Рис. 1.17 Схема повітряного охолодження
Примусове повітряне охолодження. Цей спосіб одержав найбільше розповсюдження. Це пояснюється багатьма причинами, найважливіші з яких – доступний і дешевий теплоносій, відносна простота конструкції вентилятора і повітропроводів. Недоліками систем примусового повітряного охолодження є наявність акустичних шумів і вібрацій, зниження надійності виробу, збільшення його об’єму, маси, додаткової енергії на охолодження.
На практиці застосовують три схеми примусового повітряного охолодження: приточна (рис. 1.18, а), витяжна (рис. 1.18, б) та приточно-витяжна (рис. 1.18, в).
![]()
Рис. 1.18 Система примусового повітряного охолодження
Існує багато конструктивних рішень примусового повітряного охолодження. Широко застосовуються схеми локального повітряного охолодження. На рис. 1.19 зображена схема локального охолодження потужних інтегральних схем (ІС), що встановлені на платі.
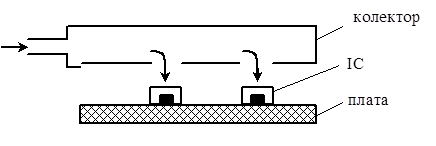
Рис. 1.19. Локальне примусове повітряне охолодження
На рис. 1.20 зображена конструкція касетного примусового повітряного охолодження. Система має повітровід, з обох сторін якого приклеєні друковані вузли з інтегральними схемами. Тепловий потік від корпуса ІС і стінки повітроводу переноситься повітрям. Один із способів інтенсифікації конвективної тепловіддачі в умовах примусового повітряного охолодження – турбулізації повітряного потоку з допомогою спеціальних пристроїв.

Рис.1.20. Касетне примусове повітряне охолодження
Кондуктивні системи охолодження. Кондукція як механізм переносу теплової енергії відіграє важливу роль в усіх схемах охолодження. В кондуктивних СО теплопровідність є основним механізмом передачі теплової енергії від джерела до теплообмінних пристроїв. Приклад використання кондуктивних теплопотоків показаний на рис. 1.21.
![]()
Рис. 1.21. Кондуктивне охолодження ІС
Рідинні системи охолодження. Рідина може бути більш ефективним теплоносієм, ніж повітря. Рідинні СО, як і повітряні, конструктивно різноманітні і багато в чому подібні.
Випарні системи охолодження. Рідини, що випаровуються в спеціальних системах, забезпечують найбільш інтенсивне охолодження РЕЗ. Але цей спосіб конструктивно найбільш складний і дорогий.
Теплообмінні пристрої. Це пристрої, в яких теплова енергія передається від одного теплоносія до другого через стінку, яка їх розділяє. Найбільш розповсюдженим є кожухотрубні (рис. 1.22, а) та компактні теплообмінники (рис. 1.22, б). В якості теплоносія в них можуть застосовуватись різні комбінації газів, парів та рідин.
а) б)
Рис. 1.22. Теплообмінники
Радіатори. Радіатор є засобом підвищення тепловіддачі з елемента, що виділяє тепло. Кількість тепла, що віддається в цьому випадку в середовище зростає найчастіше за рахунок збільшення поверхні теплообміну. Застосовуються різноманітні конструкції радіаторів: в вигляді пластини, ребер, штирів тощо. Різноманітність конструкцій радіаторів зумовлена як різними вимогами до них, так і різноманітністю умов їх застосування.
Ребристий радіатор (рис. 1.23) має найбільш розширену поверхню тепловіддачі. Ребра мають певну форму і крок розташування на основі. Розрахунок таких радіаторів пов’язаний в першу чергу з вибором кількості, висоти та кроку розташування ребер і наводиться в довідниках.
![]()
Рис. 1.23. Ребристий радіатор
1.11 Вибір загальної системи охолодження РЕЗ
Вибір тієї чи іншої системи забезпечення теплового режиму (СЗТР), системи охолодження (СО) чи системи термостабілізації (СТ) багато в чому визначає конструкцію РЕЗ. Тому вже на стадії проектування важливо визначитись з оптимальними варіантами СЗТР. Досить успішними є підходи, при яких вибір конкретного СЗТР здійснюють, виходячи з значень потужності q тепловідведення РЕЗ через його корпус площею А.
 ,
,
де Р – сумарна потужність, яку розсіює РЕЗ; КР - коефіцієнт тиску (при нормальному атмосферному тиску Кр=1). Для вибору СО РЕЗ використовують графіки, зображені на рис.1.24, де ΔТС – допустима температура перегріву найменш теплостійкого елемента відносно температури навколишнього середовища. Одні області відповідають застосуванню одного певного типу СО (повітряне вільне 1; повітряне примусове 3; рідинне примусове 5; випарне примусове 9); інші області відповідають можливості використовувати два або три типи СО (повітряне вільне та примусове 2); примусове повітряне та рідинне 4; рідинне примусове та випарне вільне 6; рідинне примусове, випарне вільне та випарне примусове 7; випарне вільне та примусове 8). Верхні лінії стосуються охолодження великих елементів, нижні – блоків і шаф РЕЗ.

Рис. 1.24. Вибір системи охолодження
Вільне повітряне охолодження застосовують для теплоненавантажених засобів (![]() ). Таке охолодження може бути реалізовано в герметичному та перфорованому корпусі і дає змогу зменшити перегрівання на 20-30%. При необхідності зовнішні поверхні роблять ребристими, використовують додаткові радіатори, ставлять теплопровідні шини.
). Таке охолодження може бути реалізовано в герметичному та перфорованому корпусі і дає змогу зменшити перегрівання на 20-30%. При необхідності зовнішні поверхні роблять ребристими, використовують додаткові радіатори, ставлять теплопровідні шини.
Примусове повітряне охолодження широко використовують для теплонавантажених РЕЗ (![]() ). Забезпечується внутрішнє перемішування або зовнішній обдув у герметичних корпусах, або продування повітря через корпус.
). Забезпечується внутрішнє перемішування або зовнішній обдув у герметичних корпусах, або продування повітря через корпус.
Рідинне охолодження є більш інтенсивним. Теплоносієм є вода, водоспиртові суміші (антифриз), кремнійорганічні та фторорганічні рідини. Використовується як вільне, так і примусове рідинне охолодження. Останнє може забезпечити інтенсивний тепловідвід до ![]() . Температура рідини не перевищує температури насичення, а перенесення теплоти від нагрітої поверхні до рідини здійснюється завдяки конвекції та теплопровідності.
. Температура рідини не перевищує температури насичення, а перенесення теплоти від нагрітої поверхні до рідини здійснюється завдяки конвекції та теплопровідності.
Випарне охолодження – найефективніший спосіб охолодження потужних РЕЗ. Рідина-теплоносій випаровується безпосередньо з відбиранням теплоти від нагрітого тіла завдяки процесу пароутворення з наступною конденсацією пари. Для охолодження застосовують рідини з низькою температурою кипіння (спирт, фреон, кремнійорганічні сполуки). Недоліками випарних систем охолодження є відносно низька надійність та великі витрати енергії.
2 . ЕОМ як механічна система
2 .1 Динамічна модель та її параметри
При певних обставинах на базі пружних елементів в ЕОМ можуть виникати та розвиватись механічні коливання [3-5, 9]. В окремому елементі може накопичитись значна механічна енергія, яка здатна викликати навіть руйнування. Для визначення рівня коливань складають відповідну динамічну модель.
Динамічна модель – ідеалізований в межах поставленої задачі об’єкт з певними характеристиками у вигляді інерційних, пружних, дисипативних та силових параметрів.
В реальних системах параметри розподілені. Проте динамічну модель досить часто вдається спростити в межах поставленої задачі настільки, що її параметри можна вважати зосередженими в окремій точці (рис. 2.1). Приведені параметри визначаються за певними правилами та методиками. Спочатку вибирається точка приведення. Ії положення характеризується координатою q, яка і вважається узагальненою координатою системи. В точці приведення прикладається приведена сила F та приведена маса m, що рухається на пружній основі з приведеним коефіцієнтом жорсткості с та приведеним коефіцієнтом дисипації ψ елемента розсіювання енергії.
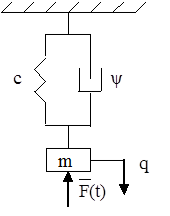
Рис. 2.1. Одномасова динамічна модель
Приведення параметрів базується на принципі незмінності (інваріантності) закону руху q = q(t). Тобто значення приведених параметрів m, F, c, ψ беруться такими, що коливання приведеної точки динамічної моделі q = q(t) співпадають достатньо добре з коливаннями цієї точки в реальній системі. Незмінність (інваріантність) коливного руху точки приведення є критерієм правильного вибору динамічної моделі.
2.1.1 Приведення мас
Кінетична енергія матеріальної точки масою mi, що рухається зі швидкістю vi, дорівнює ![]() . Кінетична енергія є скалярною величиною і кінетична енергія системи дорівнює сумі кінетичних енергій складових елементів. З точки зору незмінності закону руху складної системи її масу можна перерозподіляти при умові незмінності кінетичної енергії системи в будь-який момент часу:
. Кінетична енергія є скалярною величиною і кінетична енергія системи дорівнює сумі кінетичних енергій складових елементів. З точки зору незмінності закону руху складної системи її масу можна перерозподіляти при умові незмінності кінетичної енергії системи в будь-який момент часу:
 .
.
Звідки приведена маса
 , (2.1)
, (2.1)
деmi– маса і-тої точки;
vi – швидкість і-тої точки;
![]() – узагальнена швидкість (швидкість точки приведення).
– узагальнена швидкість (швидкість точки приведення).
Голономними називають системи, в яких зв’язки обмежують лише положення елементів системи і не обмежують величини їх швидкості. В механіці встановлено, що в голономних системах відношення vi /![]() не залежить від часу, а залежить від положення системи, тобто від значення q. Отже m = m(q).
не залежить від часу, а залежить від положення системи, тобто від значення q. Отже m = m(q).
2.1.2 Приведення сил
З точки зору незмінності закону руху механічної системи дію однієї системи сил можна замінити дією іншої системи сил, якщо потужнoсті цих систем сил будуть однакові у будь-який момент часу. При дії сили ![]() на тіло в точці і вектори
на тіло в точці і вектори ![]() та
та ![]() утворюють деякий кут
утворюють деякий кут ![]() (рис 2.2). Потужність сили
(рис 2.2). Потужність сили
![]()
Ni =![]()
![]() =
=![]()
![]() cos αi.
cos αi.
Ni > 0, якщо 0![]() αi < π/2,
αi < π/2,
Ni = 0, якщо αi = π/2,
Ni < 0, якщо π/2 ![]() αi < π.
αi < π.
Рис. 2.2. Потужність сили
При дії моменту сил Mj на тіло j (рис. 2.3) потужність моментів сил визначається формулою:
![]() ,
,
де ![]() - кутова швидкість тіла j;
- кутова швидкість тіла j;
Ni < 0, якщо Mj і ![]() направлені протилежно;
направлені протилежно;
Ni > 0, якщо Mj і ![]() співпадають за напрямом;
співпадають за напрямом;
![]()
Рис.2.3. Потужністьмоменту сил
Потужність є алгебраїчною величиною, тобто скалярною величиною, і потужність системи сил дорівнюють сумі потужностей кожної складової сили. Умова незмінності потужності в будь-який момент часу при заміні діючої системи сил приведеною силою має вигляд:
 .
.
Звідси знаходимо приведену силу:
 .
.
2.1.3 Приведення пружних параметрів
З точки зору незмінності закону руху системи пружні елементи еквівалентні, якщо в будь-який момент часу вони накопичують однакову потенціальну енергію.
Між силою F, що діє на пружній лінійний елемент, і величиною деформації, що при цьому виникає, існує залежність:
F = c x ,
де F – сила, що викликає деформацію;
с – коефіцієнт жорсткості, с = const;
x – деформація пружного елемента.
Пружний елемент накопичує потенціальну енергію  . Потенціальна енергія є скалярною величиною і потенціальна енергія системи пружних елементів дорівнює сумі потенціальних енергій пружних елементів. Умова інваріантності потенціальної енергії, що накопичує система елементів, при переході до одного приведеного пружного елемента має вигляд:
. Потенціальна енергія є скалярною величиною і потенціальна енергія системи пружних елементів дорівнює сумі потенціальних енергій пружних елементів. Умова інваріантності потенціальної енергії, що накопичує система елементів, при переході до одного приведеного пружного елемента має вигляд:
 .
.
Приведений коефіцієнт жорсткості
 . (2.3)
. (2.3)
Процедура приведення істотно спрощується, якщо здійснювати поетапне приведення паралельно або послідовно з’єднаних елементів (рис. 2.4)
![]()
Рис. 2.4. Типи з’єднань пружних елементів
Паралельне з'єднання характеризується тим, що пружні елементи мають однакові деформації (рис. 2.4 а): x1 = … = xi = … = xn. Ту ж саму деформацію має і приведений пружний елемент (рис. 2.4 в): x1 = q. Формула (2.3) для паралельного з’єднання пружних елементів набуде вигляду:
 . (2.4)
. (2.4)
Приведений коефіцієнт жорсткості паралельно з’єднаних пружних елементів більше коефіцієнта жорсткості будь-якого елемента. При цьому сила F розподіляється між елементами, тобто  . Значення Fi = ci xi = ci q.
. Значення Fi = ci xi = ci q.
Послідовне з’єднання характеризується тим, що кожний пружний елемент сприймає однакову силу (рис. 2.4 б). Потенціальну енергію такої системи запишемо в вигляді:
 .
.
З іншого боку
 .
.
Рівняння (2.3) для послідовного з’єднання пружних елементів, враховуючи останні формули, запишемо в такому вигляді:
 . (2.5)
. (2.5)
Приведена податливість 1/с послідовно з’єднаних пружних елементів більша податливості будь-якого елемента. При цьому деформація всієї системи  . Значення деформації кожного елемента
. Значення деформації кожного елемента ![]() .
.
На рис. 2.4, г зображено з’єднання двох пружних елементів. Це паралельне з’єднання, бо деформації обох елементів однакові по модулю і направлені проти дії пружної сили кожного елемента. Мають місце співвідношення: F = F1 + F2 та  .
.
2.1.4 Приведення параметрів дисипації
В реальних механічних системах має місце незворотне перетворення механічної енергії в теплову. Це перетворення відбувається за рахунок сил тертя: зовнішніх чи внутрішніх. Елементи, в яких відбувається втрата механічної енергії, називають елементами дисипації (розсіювання).
З точки зору незмінності закону руху системи, дисипативні елементи еквівалентні, якщо вони в будь-який момент часу розсіюють однакову енергію.
Розсіювання механічної енергії в пружному елементі пов’язане з його нелінійністю (рис. 2.5). Графіки F(x) при прямій і зворотній деформації відрізняються між собою. Введемо такі позначення:
![]()
![]() ↑ A – робота сили при прямій деформації.
↑ A – робота сили при прямій деформації.
Їй відповідає горизонтально заштрихована площа;
↓ А – робота сили при зворотній деформації.
Їй відповідає вертикально заштрихована площа;
↑↓А – розсіяна енергія, А↑↓= А↑–А↓.
Рис. 2.5. Характеристика F(x) нелінійного елемента
Коефіцієнт дисипації ψ вводиться як відношення
ψ = А↑↓ / А↑, (2.6)
де ψ – безрозмірний коефіцієнт, який визначає відносну частину розсіяної енергії від енергії, що накопичує пружний елемент.
Енергія, яку розсіює механічна система в пружних елементах дорівнює сумі енергій, що розсіює кожний дисипативний елемент. Умова незмінності розсіяної енергії при переході до одного приведеного елемента дисипації відображається рівнянням:
 .
.
Приведений коефіцієнт дисипації
 . (2.7)
. (2.7)
При паралельному з’єднанні елементів дисипації формула (2.7) має вигляд:
 . (2.8)
. (2.8)
При послідовному з’єднанні формула (2.7) має вигляд:
 . (2.9)
. (2.9)
2.2 Вільні коливання одномасової системи
Розглянемо одномасову модель механічної системи (рис. 2.6).
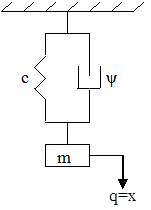
Рис. 2.6. Одномасова система
В стані рівноваги пружина розтягнута. Пружна сила врівноважує силу тяжіння mg. Стан рівноваги вибирається як початкове положення. Якщо систему вивести із стану рівноваги, вона здійснює коливання відносно початкового положення. Згідно закону Ньютона:
![]() , (2.10)
, (2.10)
де пружна сила cq та сила тертя ![]() направлені відповідно проти переміщення q та проти напрямку руху, тобто проти швидкості
направлені відповідно проти переміщення q та проти напрямку руху, тобто проти швидкості ![]()
Рівняння (2.10) запишемо в канонічному вигляді:
![]() , (2.11)
, (2.11)
де ![]() – кутова частота власних коливань; n = b/2m, де b – кінематичний коефіцієнт тертя.
– кутова частота власних коливань; n = b/2m, де b – кінематичний коефіцієнт тертя.
Рівняння (2.11) – лінійне однорідне диференціальне рівняння другого порядку зі сталими коефіцієнтами. Воно описує вільні коливання. В реальних механічних системах значення коефіцієнта тертя b практично не впливає на частоту вільних коливань. Тому розв’язок рівняння (2.11) має вигляд:
q = e–nt (С1·sin kt + С2·cos kt) = e–ntA·cos(kt - j), (2.12)
де ![]() ; sin j = С1/A; cos j = С2/A.
; sin j = С1/A; cos j = С2/A.
Сталі інтегрування С1 і С2 визначаються з початкових умов коливного процесу ![]() і qo = q(0):
і qo = q(0):
С2 = qo; С1 = (![]() + nqo)/ k. (2.13)
+ nqo)/ k. (2.13)
Завдяки множнику е–nt навіть при малому значенні n система з часом припиняє свої вільні коливання:
при t®¥ значення е–nt=1/ent ® 0 (рис. 2.7).

Рис. 2.7. Затухаючі вільні коливання
Вільні коливання відіграють дуже важливу роль у визначенні приведених параметрів механічної системи експериментальним способом.
Алгоритм експерименту:
1. Будується статична характеристика F = F(q) (рис.2.8) і визначається коефіцієнт жорсткості с = F / q.

Рис. 2.8. Статична характеристика F(q)
2. Збуджуються вільні коливання. Експериментально визначають Т або f й знаходять кругову частоту власних коливань:
k = 2π / T = 2πf.
3. Знаходять приведену масу:
![]()
4. Збуджують власні коливання і спостерігають їх затухання, вимірюють амплітуду А1 і Аs та визначають:
 ,
,
де S – число коливань, що спостерігається (звичайно S = 10, 100, 1000, ...)
5. Визначають приведений коефіцієнт затухання:
n = 2λ / T.
2.3 Вимушені коливання при гармонічному збудженні
Розглянемо одномасову модель механічної системи, яка здійснює вимушені коливання під дією гармонічної сили (рис. 2.9):
F(t) = F0 cos ωt.
При F=0 та q=0 система має стан стійкої рівноваги.
Згідно закону Ньютона складаємо баланс сил:
![]() .
.
В канонічній формі рівняння набуває вигляду
![]() , (2.14)
, (2.14)
де 2n=b/n, k2 =c/m, ![]() .
.

Рис. 2.9. Вимушені коливання
Це лінійне неоднорідне диференціальне рівняння другого порядку зі сталими коефіцієнтами. Його загальний розв’язок qЗ.Н. шукають у вигляді:
qЗ.Н. = qЗ.О. + qЧ.Н., (2.15)
де qЗ.О. – загальний розв’язок однорідного рівняння (при f0=0);
qЧ.Н. – частковий розв’язок неоднорідного рівняння.
Оскільки при t®¥ вільні коливання затухають, то достатньо визначити частковий розв’язок qЧ.Н.(t). Його шукаємо у вигляді гармоніки, бо гармонічною є права частина рівняння (2.14).
qЧ.Н. = Acos(ωt-j) = С1sin ωt+С2cos ωt. (2.16)
Сталі інтегрування відповідають усталеному режиму вимушених коливань, які визначають за таким алгоритмом. Диференціюємо рівняння (2.16) один, а потім ще один раз і одержимо відповідно ![]() та
та ![]() , які підставляємо в рівняння (2.14). З умови тотожної рівності лівої і правої частини, прирівнюючи коефіцієнти при cos ωt та sin ωt, одержимо два алгебраїчні рівняння з двома невідомими А і tg φ. Остаточно одержимо:
, які підставляємо в рівняння (2.14). З умови тотожної рівності лівої і правої частини, прирівнюючи коефіцієнти при cos ωt та sin ωt, одержимо два алгебраїчні рівняння з двома невідомими А і tg φ. Остаточно одержимо:
 ,
,  . (2.17)
. (2.17)
2.4 Коефіцієнт динамічності
Рівняння (2.17) на практиці застосовують в іншому вигляді.
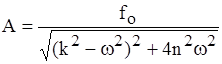
Введемо поняття коефіцієнта динамічності:
 , (2.18)
, (2.18)
де Ао – деформація пружного елементу від дії сталої сили Fo. Коефіцієнт динамічності – безрозмірна величина.
Із сказаного раніше випливає, що
 . (2.19)
. (2.19)
Введемо також такі безрозмірні коефіцієнти:
![]() , (2.20)
, (2.20)
![]() . (2.21)
. (2.21)
Тоді підставляючи (2.17) та (2.19) в рівняння (2.18) та враховуючи (2.20) і (2.21), одержимо
 . (2.22)
. (2.22)
В останній формулі всі величини безрозмірні.
Типовий графік функції (2.22) зображено на рис.2.10.
![]()

Рис. 2.10. Графік функції ![]()
Допустиме значення ![]() коефіцієнта динамічності визначає резонансну зону
коефіцієнта динамічності визначає резонансну зону ![]() , дорезонансну зону
, дорезонансну зону ![]() та зарезонансну зону
та зарезонансну зону ![]() .
.
При ![]() коефіцієнт динамічності
коефіцієнт динамічності ![]() . Тобто при зростанні Z в зарезонансній зоні система взагалі не реагує на збудження.
. Тобто при зростанні Z в зарезонансній зоні система взагалі не реагує на збудження.
Вплив параметра δ проявляється лише в резонансній зоні. Максимальне значення функція ![]() приймає при деякому значення Z*.
приймає при деякому значення Z*.
 . (2.23)
. (2.23)
2.5 Зменшення вимушених коливань
Зменшення рівня вимушених коливань зводиться до зменшення значень коефіцієнта динамічності. Це може здійснюватись за рахунок зміни параметрів с, m та b. Характер зміни параметрів залежить від того, в якій зоні працює система: дорезонансній, резонансній, зарезонансній.
Резонанс. Зменшувати коливання в резонансному режимі можна тільки за рахунок збільшення параметра δ = n/k та далі за схемою
![]()

Отже, щоб зменшити коливання в резонансному режимі треба збільшувати коефіцієнт кінематичного тертя b, зменшувати приведену масу або приведений коефіцієнт жорсткості.
Дорезонансний режим. Зменшення коефіцієнта динамічності αd відповідає схемі:
![]()
![]()

В дорезонансному режимі треба збільшувати коефіцієнт жорсткості С або зменшувати приведену масу m. Потрібного результату можна досягти, зменшуючи кругову частоту ω вимушених коливань. Проте досить часто це пов’язано із зменшенням робочих швидкостей.
Зарезонансний режим. Має місце наступна схема:
![]()
|
|
|


![]()
Отже зміна параметрів ω, с та mв за резонансній зоні прямо протилежна їх зміні в дорезонансній зоні. В зарезонансній зоні працювати вигідніше, бо значення αd менше і робочі швидкості вищі, ніж в дорезонансній зоні. Проте потрібно переходити через резонанс. На щастя, резонанс розвивається не миттєво. Звідси рекомендація: здійснювати форсований перехід через резонансну зону. При розгоні це роблять в холостому (ненавантаженому) режимі, а при зупинці використовують гасій (демпфер).
2.6 Вимушені коливання при періодичному збудженні
Розглянемо більш загальний випадок збудження вимушених коливань, коли на систему діє періодична збуджуюча сила: F(t)=F(t+T), ![]() . Як правило періодичну функцію збудження можна представити у вигляді ряду Фур’є
. Як правило періодичну функцію збудження можна представити у вигляді ряду Фур’є
 . (2.24)
. (2.24)
В силу лінійності рівняння (2.24) загальний розв’язок його теж можна представити у вигляді суми гармонік типу (2.16). При цьому амплітуда вимушених коливань кожної гармоніки визначається формулою
 , (2.24)
, (2.24)
Де
 . (2.26)
. (2.26)
Резонансною є гармоніка, для якої jz = ![]() ≈ 1. Отже, резонансною є гармоніка з номером
≈ 1. Отже, резонансною є гармоніка з номером
![]() . (2.27)
. (2.27)
Максимальна амплітуда сумарних вимушених коливань від функції F(t) оцінюється нерівністю
 ,
,
де ![]() . Тобто ряд скорочується до резонансної гармоніки і додається ще одна або дві гармоніки, які можуть впливати на результат.
. Тобто ряд скорочується до резонансної гармоніки і додається ще одна або дві гармоніки, які можуть впливати на результат.
2.7 Коливання елементів РЕА типу балок
Типовими прикладами таких елементів є резистори, конденсатори тощо. Розглянемо коливання резистора в поперечному напрямку, що супроводжуються деформаціями на згин (рис. 2.11). Є два варіанти динамічної моделі. Масу резистора можна привести в точку (рис. 2.11, а) або розподілити по всій довжині L(рис. 2.11, б). Розподілена маса ![]() . Власна частота коливань системи з зосередженою масою
. Власна частота коливань системи з зосередженою масою
 , (2.28)
, (2.28)
а частота коливань системи з рівномірно розподіленою масою
 , (2.29)
, (2.29)
де ЕІ – жорсткість балки на згин;
Е – модуль пружності Юнга І роду;
І – осьовий момент інерції перерізу балки;
φ – коефіцієнт, що враховує форму закріплення балки.
а) б)
Рис. 2.11. Моделі балок
![]()

![]()
а) б) в)
Рис. 2.12. Переріз балок
Типові перерізи балок показані на (рис. 2.12.). Осьовий момент інерції круглої балки  (рис. 2.12, а), балки з прямокутним перерізом
(рис. 2.12, а), балки з прямокутним перерізом  (рис. 2.12, б), осьовий момент інерції двотаврової балки (рис. 2.12, в) вибирається із спеціальної таблиці. Практика свідчить, що частота власних коливань балок лежить в межах f = 5 ÷ 30000 Гц.
(рис. 2.12, б), осьовий момент інерції двотаврової балки (рис. 2.12, в) вибирається із спеціальної таблиці. Практика свідчить, що частота власних коливань балок лежить в межах f = 5 ÷ 30000 Гц.
2.8 Коливання пластин
Це особливо важливий випадок, бо стосується монтажних плат, шассі та інших плоских тіл.
Розглянемо прямокутну пластину постійної товщини з пружного однорідного ізотропного матеріалу.
Теорія дає загальну розрахункову формулу
 , Гц, (2.30)
, Гц, (2.30)
деа – довжина пластини в см,
h – товщина пластини в см,
ρ – густина матеріалу, з якого зроблені пластини,
D = - циліндрична жорсткість пластини,
- циліндрична жорсткість пластини,
![]() - коефіцієнт Пуассона,
- коефіцієнт Пуассона,
![]() - коефіцієнт, що залежить від способу закріплення країв пластини.
- коефіцієнт, що залежить від способу закріплення країв пластини.
Формулу (2.30) перетворюють до вигляду зручного в користуванні. Для цього вводять параметр
С =  , (2.31)
, (2.31)
Тоді (2.30) прийме вигляд
f =  (2.32)
(2.32)
де а і h задаються в см.
Базовим приймають випадок, коли пластина виготовлена зі сталі (Ес = 2,1*1011 ).
).
Для врахування параметрів матеріалу пластини (Е, ![]() ) вводять коефіцієнт
) вводять коефіцієнт
КМ =  . (2.33)
. (2.33)
Для врахування впливу підвісних елементів на платі вводять коефіцієнт
КВ =  , (2.34)
, (2.34)
де М – маса елементів;
mпл – маса пластини;
Тоді (2.32) набуває вигляду:
 . (2.35)
. (2.35)
Порівняно з (2.32) змінився зміст коефіцієнта С, який вже вибирається із спеціальної таблиці в залежності від схеми закріплення країв пластини та співвідношення ![]() (рис. 2.13).
(рис. 2.13).
а) б)
![]() Рис. 2.13. Схеми закріплення краю пластини
Рис. 2.13. Схеми закріплення краю пластини
Кожний край пластини має три варіанти закріплення: край може бути защемлений (рис. 2.13, а), вільно підпертий знизу (рис. 2.13, б), або взагалі вільним. Три варіанти закріплення кожної сторони породжують 20 схем закріплення плат. Шляхом теоретичних розрахунків та експериментальних досліджень побудовані спеціальні таблиці значень коефіцієнта С в залежності від варіанта закріплення пластини та в залежності від відношення ![]() .
.
Частота власних коливань плати може відповідати резонансній зоні. Вихід з резонансної зони здійснюється за рахунок зміни товщини пластини h або значення коефіцієнта С. Оскільки змінювати відношення ![]() можна лише в деяких випадках, то практичне значення має зміна С за рахунок зміни закріплення країв пластини. Зміну товщини чи схеми кріплення плати можна здійснити практично завжди.
можна лише в деяких випадках, то практичне значення має зміна С за рахунок зміни закріплення країв пластини. Зміну товщини чи схеми кріплення плати можна здійснити практично завжди.
2.9 Віброзахист обчислювальної техніки
Всі види радіоелектронної апаратури зазнають зовнішніх або внутрішніх механічних дій. Механічні дії передаються кожному елементу і викликають їх вібрації. Викликані вібрації можуть мати резонансний характер. При резонансі виникають особливо великі деформації, які супроводжуються великими механічними напругами і можуть призвести навіть до руйнування елементу [9].
Постає задача забезпечення вібраційної стійкості та вібраційної міцності. Вібраційна стійкість – властивість об’єкта при заданій вібрації виконувати задані функції та зберігати значення своїх параметрів у межах норми. Вібраційна міцність – властивість об’єкта витримувати без руйнувань тривалі вібраційні навантаження.
Вібраційну стійкість та міцність можна підвищити за рахунок створення та застосування спеціальних матеріалів. Крихкі матеріали замінюють матеріалами з більшою пластичністю. Чавунне литво замінюють тонколистовим стальним прокатом, алюмінієве литво – прокатом алюмінієвих та титанових сплавів, ізоляційний фарфор – пластичними смолами, силікатне скло – органічним тощо. Сучасні матеріали можуть бути кращими від попередніх, але їх можливості завжди обмежені. Наступним значним кроком підвищення вібраційної стійкості та міцності є правильний вибір параметрів елементів конструкції. В першу чергу це стосується маси, пружності демпфування та способу кріплення елементів. Цю проблему ми розв’язували, коли розглядали коливання друкованих плат.
Найбільш привабливою є ідея ізолювання елементів від зовнішніх механічних дій. Тобто ставиться задача віброізоляції елемента і навіть всього обчислювального комплексу. Це зумовлено тим, що обчислювальна техніка зазнає, як правило, зовнішніх механічних дій. Зовнішнім збудником вібрації ОТ можуть бути вібрації навколишніх об’єктів або ударні (імпульсні) дії. Найбільш універсальним і ефективним способом боротьби з виникненням вібрацій в ОТ є ізоляція об’єкту від зовнішніх дій з допомогою амортизаторів. Амортизатори є пружними елементами, на яких встановлюється об’єкт. Такий спосіб віброзахисту насправді потребую індивідуального рішення, але він має загальні правила та рекомендації.
Об’єкт, що встановлюється на амортизаторах, в загальному випадку як тверде тіло має шість ступенів вільності. Корпус об’єкта може одночасно здійснювати шість простих коливань: три поступальні та три обертальні коливання. Як правило ці коливання зв’язані між собою, збудження одного з них приводить до виникнення інших. Таке явище розширює можливість виникнення резонансу. Існують певні прийоми зробити ці коливання незалежними. Якщо це вдається, то загальна задача віброзахисту зводиться до більш простих задач віброізоляції одномасової моделі. В першу чергу намагаються захиститись від найбільш небезпечного зовнішнього збудження.
Найбільш небезпечним є вертикальне коливання фундаменту. Найчастіше зовнішні вібрації мають високу частоту, тому намагаються забезпечити дорезонансний режим коливань. Для цього ставлять податливі амортизатори, а збільшувати масу об’єкта нераціонально. Доцільно збільшити тільки масу основи, на яку ставлять обчислювальну апаратуру, при умові, що сама основа встановлюється на амортизаторах. Об’єкт, що має низьку частоту власних коливань, практично не сприймає високочастотних зовнішніх вібрацій. Особливу небезпеку становлять ударні збудження. Ударний імпульс збуджує коливання широкого спектру, включаючи і низькі частоти. При ударних збудженнях застосовують амортизатори з високими демпфуючими властивостями.
Треба пам’ятати, що неправильний вибір амортизаторів та схеми їх розміщення може принести більше шкоди, ніж вібрація, що діє на незахищену техніку. Для розрахунку системи амортизаторів потрібні певні початкові дані:
- параметри механічних дій (характеристики вібрацій, ударних імпульсів тощо);
- умови експлуатації;
- конструктивні параметри апарату (маса, положення центру мас, моменти інерції відносно головних осей, габаритні розміри тощо);
- допустимі деформації та динамічні навантаження;
- статичні та динамічні характеристики амортизаторів.
На рис. 2.14. зображені дві схеми установки апарата на чотирьох амортизаторах. Центр мас апарата співпадає з геометричним центром корпуса. Всі амортизатори однакові, центр пружних сил, або центр жорстокості, лежить на вертикальній осі Z. Якщо центр жорстокості (ЦЖ) лежить нижче центру мас (ЦМ) то виникає небезпека збудження всіх шести простих коливань корпуса. Наприклад, горизонтальна механічна дія вздовж осі Х викличе збудження не тільки поступальних коливань вздовж осі Х, але й кругових коливань навколо осі Z і може привести до вертикальних поступальних коливань (рис. 2.14,а). Якщо амортизатори розмістити так, як це показано на рис. 2.14,б, то ЦМ і ЦЖ співпадуть. В силу повної симетрії відносно осей x, y, zвсі прості коливання стануть незалежними.
![]()
а) б)
Рис. 2.14. Схеми розташування амортизаторів
Якщо центр мас (рис. 2.14, б) зміщений від осі z в горизонтальній площині, то вага об’єкта вже нерівномірно розподіляється між чотирма однаковими амортизаторами. Різними будуть й деформації амортизаторів навіть в статичній рівновазі. Корпус зміститься з центром мас і повернеться відносно осей. При збудженні коливань ці зміщення можуть збільшитись і шість коливань будуть сильно зв’язані між собою. Щоб обмежитись однаковими амортизаторами і при цьому зменшити залежність простих коливань, поступають наступним чином. Між більш навантаженими амортизаторами і фундаментом розміщують прокладки. Товщину прокладок підбирають так, щоб при різних деформаціях амортизаторів корпус під дією власної сили тяжіння залишався горизонтальним. Така початкова умова дозволяє досить часто звести майже нанівець залежність між собою шести простих коливань корпусу і тим самим спростити розв’язування задачі віброізоляції радіоелектронного засобу.
Амортизатори поділяють на низько-, середньо- та високочастотні, які забезпечують віброізоляцію в частотних діапазонах 5 - 600, 15 – 1200 і 32 - 2000 Гц відповідно. За способом дії виділяють чотири групи амортизаторів. У металогумових амортизаторів між металевими деталями кріплення до основи запресовано пружний елемент із спеціальної гуми. Ці амортизатори компактні, прості, мають досить велику демпферну здатність та низьку вартість. На жаль, вони мають малий діапазон механічної деформації, змінюють власну частоту із зміною навантаження, швидко старіють. Металопружні амортизатори містять пружину в поєднанні з іншими демпферними елементами й обмежувачами. Ці амортизатори більш універсальні і довговічні, допускають значні зміни робочої температури. Тросові амортизатори забезпечують широкий діапазон навантажень, велике демпфування, захист від механічних дій по всіх напрямках. Гумові амортизатори виконують з масло- та морозостійкої еластичної гуми або губчастої листової гуми у вигляді втулок, прокладок і шайб, а використовують їх для захисту окремих вузлів РЕЗ.
3. Електромагнітна сумісність радіоелектронних засобів
3.1 Проблеми електромагнітної сумісності
Радіоелектронні, електронні, аналогові та цифрові технічні засоби повинні мати властивості електромагнітної сумісності [10-14].
Електромагнітна сумісність – здатність виробів нормально функціонувати поруч з іншими виробами в умовах дії між ними та на них додаткових електромагнітних полів при виготовлені та експлуатації.
На сучасному етапі задача електромагнітної сумісності стає особливо актуальною, бо вимагає забезпечення стійкої роботи РЕЗ в умовах впливу різноманітних електромагнітних полів при постійному зростанні їх густини і потужності та одночасному підвищенні чутливості нової апаратури.
Задача сумісності реально виникає вже на стадії випробування та налагодження апаратури. Але розв’язування задачі на цій стадії проектування шляхом відповідних конструкторських рішень дещо запізніле, скоріше всього буде дорогим і залишиться незадовільним. Якщо ж питання сумісності вирішуються на самій ранній стадії конструювання, то вдається уникнути до 90% потенційно можливих труднощів, що виникають потім на стадії випробування.
Стійкість РЕЗ до електромагнітних дій можна підвищити за рахунок екранування, раціонального заземлення та інших конструкційних рішень. Цю задачу розв’язують також схемотехнічними або структурними методами. Підкреслимо, що ці методи достатньо загальні й їх розповсюджують на широкий клас електронних засобів, серед яких цифрові засоби обробки сигналів особливо чутливі до зовнішніх та внутрішніх електромагнітних дій.
3.2 Джерела, приймачі та зв’язки завад
Завада – це непередбачена електронною схемою передача напруги, струму чи потужності.
Розрізняють зовнішні та внутрішні завади. Завади, особливо внутрішні, суттєво залежать від конструкції РЕЗ. При аналізі та виборі методів захисту від електромагнітних завад майже завжди в будь-якій конструкції можна виділити джерела завад (ДЗ), приймачі завад (ПЗ) та відповідні механізми зв’язків між ними, або просто зв’язки завад (ЗЗ). ДЗ, ПЗ та ЗЗ структурно зображені на рис.3.1.
![]()
Рис.3.1. Джерело, приймач та зв'язок завад
Практично кожний елемент системи при певних конструкторських рішеннях може стати як джерелом завад, так і приймачем завад. Все залежить від відношення вихідної енергії одного елемента та чутливості до сприйняття цієї енергії іншим елементом. Тому вміння правильно визначити дію завад ще на стадії проектування вимагає від конструктора високого професійного рівня і є важливою підставою для досягнення ефективної функціональної роботи РЕЗ при мінімальних затратах коштів.
Найбільш ймовірними джерелами завад можуть бути: мережа змінного струму; потужні генератори ВЧ, особливо імпульсні та працюючі в нелінійному режимі; імпульсні модулятори з високою напругою і великим струмом; вихідні і передкінцеві каскади підсилювачів ВЧ, ПЧ, НЧ; генератори розгортки, особливо з високою напругою і малим часом зворотного ходу; реле та інші перемикаючі прилади; вихідні і силові трансформатори; колекторні електродвигуни тощо.
Найбільш ймовірними приймачами завад можуть бути: всі радіоприймачі, особливо чутливі; вхідні каскади підсилювачів всіх типів; спускові пристрої з високою чутливістю (тригери, вібратори) тощо.
Зв’язки завад можуть здійснюватись через електричне, магнітне чи електромагнітне поле та через з’єднувальні провідники або хвилеводи.
Характеристики поля завад визначаються оточуючим середовищем і відстанню приймача завад (ПЗ) від джерела завад (ДЗ). Поблизу ДЗ властивості поля визначаються, в основному, характеристиками джерела. Далеко від ДЗ властивості поля залежать, головним чином, від середовища, в якому розповсюджується поле завад. Тому простір навколо ДЗ умовно можна поділити на дві зони. Поруч з джерелом розташоване ближнє, або індуктивне поле. На відстані ![]() розташовується дальнє поле, або поле випромінювання (рис.3.2.), де
розташовується дальнє поле, або поле випромінювання (рис.3.2.), де ![]() - довжина хвилі.
- довжина хвилі.
![]()
Рис. 3.2. Характер поля в залежності від відстані до ДЗ
В загальному випадку ближнє поле є електромагнітним. Але при певних обставинах його умовно можна вважати або чисто електричним, або чисто магнітним. Це визначається відношенням напруженості електричного поля Е до напруженості магнітного поля Н, яке називається комплексним хвильовим опором.
![]() (3.1.)
(3.1.)
Якщо ![]() >>
>>![]() , то ближнє поле завад вважається електричним, якщо ж
, то ближнє поле завад вважається електричним, якщо ж ![]() , то ближнє поле завад вважається магнітним.
, то ближнє поле завад вважається магнітним.
Прикладом електричного поля є наведення, що випромінює прямий провід, а прикладом магнітного поля може служити наведення, що випромінює петля чи шлейф. Як правило, якщо в джерелі генерується малий струм і висока напруга, то ближнє поле в основному змінне електричне. Якщо в джерелі великий струм і мала напруга, то ближнє поле змінне магнітне.
В ближньому змінному електричному полі його електрична складова затухає пропорційно ![]() , в той же час доповнююча його магнітна складова затухає пропорційно
, в той же час доповнююча його магнітна складова затухає пропорційно ![]() . В ближньому змінному магнітному полі навпаки його магнітна складова затухає пропорційно
. В ближньому змінному магнітному полі навпаки його магнітна складова затухає пропорційно ![]() , бо вона утворює доповнююче його електричне поле, що затухає пропорційно
, бо вона утворює доповнююче його електричне поле, що затухає пропорційно ![]() . Таким чином можна сказати, що в основному закони ослаблення електромагнітних полів Е і Н обернено пропорційні квадрату відстаней від джерела, а в випадку помітної переваги одного поля над другим переважаюче поле затухає швидше
. Таким чином можна сказати, що в основному закони ослаблення електромагнітних полів Е і Н обернено пропорційні квадрату відстаней від джерела, а в випадку помітної переваги одного поля над другим переважаюче поле затухає швидше ![]() в зв’язку з втратами енергії на збудження доповнюючого його поля другого типу.
в зв’язку з втратами енергії на збудження доповнюючого його поля другого типу.
Із збільшенням відстані r від джерела значення комплексного хвильового опору в обох випадках зближуються і на відстані ![]() воно дорівнює
воно дорівнює ![]() . Ближнє поле стає дальнім полем завад. В дальньому полі як електрична так і магнітна складові затухають пропорційно
. Ближнє поле стає дальнім полем завад. В дальньому полі як електрична так і магнітна складові затухають пропорційно ![]() .
.
Велике значення має також характер зміни напруженості поля в часі. В зв’язку з цим розрізняють імпульсні, синусоїдальні і коливально затухаючі поля завад. Всі ці випадки мають місце при роботі РЕЗ.
3.3 Застосування еквівалентних електричних схем
Традиційно аналіз роботи РЕЗ в умовах дії електромагнітних полів завад здійснюється методами теорії кіл. Всі види зв’язків завад (ЗЗ) ділять на ємнісні, індуктивні та кондуктивні.
Спрощена модель ємнісного зв’язку між двома провідниками, один з яких А є джерелом завад, а другий В є приймачем завад, зображена на рис.3.3.
а) б)
Рис.3.3. Ємнісний зв’язок між провідниками:
а – фізична модель; б – еквівалентна схема
Ємнісний зв'язок здійснюється через ближнє електричне поле напруженості Е. Якщо провідник має напругу ![]() , то провідник В з проводом А зв’язаний ємністю завад
, то провідник В з проводом А зв’язаний ємністю завад ![]() і має відносно корпусу опір завад
і має відносно корпусу опір завад ![]() та напругу наведення
та напругу наведення ![]() .
.
Спрощена модель індуктивного зв’язку між двома провідниками, з яких провідник А є джерелом завад, а провідник В є приймачем завад, зображена на рис.3.4.
Індуктивний зв'язок здійснюється через ближнє магнітне поле напруженості Н, яке виникає при проходженні в провіднику А змінного струму ![]() , де
, де ![]() - повний опір кола А. Коло А індуктивно зв’язане з колом В взаємною індуктивністю
- повний опір кола А. Коло А індуктивно зв’язане з колом В взаємною індуктивністю ![]() . Струм
. Струм ![]() збуджує в колі В електрорушійну силу
збуджує в колі В електрорушійну силу ![]() , під дією якої в колі протікає струм
, під дією якої в колі протікає струм ![]() , де
, де ![]() - повний опір кола В.
- повний опір кола В.
а) б)
Рис.3.4. Індуктивний зв’язок між провідниками:
а – фізична модель; б – еквівалентна схема
На рис.3.5. зображена узагальнена схема зв’язку завад, з якої видно, що опір зв’язку завад ![]() та опір приймача завад
та опір приймача завад ![]() утворюють дільник напруги.
утворюють дільник напруги.
![]()
Рис.3.5. Узагальнена схема зв’язку завад
Коефіцієнт зв’язку по напрузі
 ,(3.2)
,(3.2)
де ![]() - опір кола.
- опір кола.
Комплексний та повний загальний опір кола при послідовному з’єднанні елементів відповідно визначається формулою
![]() ,(3.3)
,(3.3)
 .(3.4)
.(3.4)
При паралельному з’єднанні елементів комплексний та повний загальний опір кола відповідно визначаються формулою
 ,(3.5)
,(3.5)
 .(3.6)
.(3.6)
Якщо ![]() , то
, то ![]()
![]()
![]() і формула (3.2.) спрощується
і формула (3.2.) спрощується
 .(3.7)
.(3.7)
Зв'язок через загальний омічний опір виникає там, де струми двох різних схем проходять через спільний опір. При цьому спад напруги, що викликає кожна із схем, служить для іншої схеми завадою (рис. 3.6.). На схемі R – загальний опір шин, а r – опір джерела живлення.
![]()
Рис.3.6. Кондуктивний зв’язок завад
3.4 Приклад розрахунку еквівалентної схеми
Паразитна ємність монтажу між двома провідниками ![]() . Кожний провідник має ємність відносно корпусу
. Кожний провідник має ємність відносно корпусу ![]() . На провідник поступає сигнал змінної напруги
. На провідник поступає сигнал змінної напруги ![]() з частотою
з частотою ![]() . Виникає питання: яка напруга шумів наводиться на провідник В, якщо підключений до його кінця резистор R має:
. Виникає питання: яка напруга шумів наводиться на провідник В, якщо підключений до його кінця резистор R має:
а) нескінченний опір, б) R=1000 Oм, в) R=50 Ом.
Зобразимо фізичну модель та відповідну еквівалентну схему.
В випадку, коли ![]() , цей опір можна відкинути.
, цей опір можна відкинути.
Тоді
 .
.
![]()
В випадку, коли ![]() , комплексний опір паралельного з’єднання
, комплексний опір паралельного з’єднання
 ,
,
а комплексний загальний опір
 .
.
Повний опір

 .
.
Враховуючи, що ![]() , при R=1000 Ом
, при R=1000 Ом  . Цього значення напруги наведення досить, щоб перевантажити деякі підсилювачі й тоді підсилення корисного сигналу стане неможливим.
. Цього значення напруги наведення досить, щоб перевантажити деякі підсилювачі й тоді підсилення корисного сигналу стане неможливим.
При R=50 Ом в результаті одержимо ![]() . Цього значення напруги досить, щоб перевантажити деякі мікросхеми і тоді підсилення корисного сигналу стане неможливим.
. Цього значення напруги досить, щоб перевантажити деякі мікросхеми і тоді підсилення корисного сигналу стане неможливим.
3.5 Екранування
Екранування здійснює захист приймача від дії електричних, магнітних та електромагнітних полів джерела з допомогою металевих екранів. Розрізняють зовнішнє та внутрішнє екранування. При зовнішньому екрануванні електричні кола з відносно низькими енергетичними рівнями захищають від впливу зовнішніх відносно них полів завад. З допомогою екрану навколо приймача створюється частина простору, в якому ослаблена дія полів завад. При внутрішньому екрануванні обмежується простір навколо джерела завад і тим самим обмежується поширення енергії від власного внутрішнього поля об’єкту, наприклад поля вихідного каскаду підсилювача проміжної частоти.
Ефективне екранування потребує врахування багатьох і різноманітних обставин, моделі яких повинні бути представлені фізично переконливо та математично просто.
Не зважаючи на те, що практично дуже важко виділити суто електричне, магнітне чи електромагнітне поле, з методичної точки зору зробити це дуже важливо. Бо саме характер поля завад визначає якісно той чи інший спосіб екранування. Відповідно розрізняють електростатичне, магнітостатичне та електромагнітне екранування.
Дія екрана залежно від його взаємодії з полем завади може грунтуватися на одному з трьох принципів: відбиття від екрана, шунтування та поглинання екраном електромагнітних хвиль. Відповідні екрани називають відбивними (електромагнітними), шунтувальними (магнітостатичними) і поглинальними (електростатичними та електромагнітними).
Ефективність екранування S визначається відношенням напруг, струмів, напруженостей електричного та магнітного полів в області екранування при відсутності та наявності екрана:
![]()
![]()
![]()
![]() .(3.8)
.(3.8)
В техніці провідникового зв’язку ефективність екранування прийнято оцінювати в неперах:
![]() (3.9)
(3.9)
В радіотехніці екранне затухання оцінюють в децибелах:
![]() (3.10)
(3.10)
При цьому В=0,115А або А=8,7В.
3.6 Екранування електростатичного поля
Електростатичне екранування грунтується на замиканні електричного екрана (паразитної ємності ) на шину з нульовим потенціалом (корпусом, “землею”).
Розглянемо типовий випадок електростатичного наведення (рис. 3.7), тобто ємнісний зв'язок між джерелом А та приймачем В, та встановимо спосіб його зменшення.
![]()

а)б)
Рис. 3.7. Електростатичне наведення:
а) – фізична модель; б) – еквівалентна схема
Джерело завади А має постійну напругу чи напругу ![]() , що повільно змінюється. У приймачі В в наслідок електромагнітної індукції наводяться заряди, і він набуває потенціалу
, що повільно змінюється. У приймачі В в наслідок електромагнітної індукції наводяться заряди, і він набуває потенціалу ![]() . Згідно розглянутому вище прикладу
. Згідно розглянутому вище прикладу
 (3.11)
(3.11)
або
 .(3.12)
.(3.12)
Згідно формули (3.12) для зменшення наведеної напруги ![]() треба збільшити відношення ємностей
треба збільшити відношення ємностей ![]() . Для цього треба або збільшити ємність
. Для цього треба або збільшити ємність ![]() , або зменшити ємність
, або зменшити ємність ![]() . Збільшення
. Збільшення ![]() означає збільшення вхідної ємності та ємності монтажу, а ці можливості дуже обмежені. Зменшення
означає збільшення вхідної ємності та ємності монтажу, а ці можливості дуже обмежені. Зменшення ![]() можна здійснити шляхом збільшення відстані між джерелом А і приймачем В. Тому саме цей спосіб реалізують на практиці. Графік залежності
можна здійснити шляхом збільшення відстані між джерелом А і приймачем В. Тому саме цей спосіб реалізують на практиці. Графік залежності ![]() від
від ![]() при сталих інших параметрах зображений на рис. 3.8.
при сталих інших параметрах зображений на рис. 3.8.
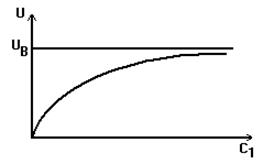
Рис. 3.8. Залежність напруги наведення від ємності завад
Але збільшення відстані між джерелом і приймачем може привести до збільшення габаритів всього пристрою. Задачу зменшення напруги наведення можна здійснити з допомогою екрану.
Спочатку розглянемо незаземлений екран в вигляді плоскої пластини та відповідну еквівалентну схему (рис. 3.9).
![]()
![]()
а)б)
Рис. 3.9. Дія плоского екрана:
а – фізична модель; б – еквівалентна схема.
Елементи ![]() ,
, ![]() ,
, ![]() та
та ![]() утворюють подвійний ємнісний дільник напруги. В першому наближенні приймаємо, що
утворюють подвійний ємнісний дільник напруги. В першому наближенні приймаємо, що ![]() . Для подвійного дільника, що утворює плоский незаземлений екран
. Для подвійного дільника, що утворює плоский незаземлений екран
 . (3.13)
. (3.13)
Дослідимо рівняння (3.13), враховуючи, що ![]() та
та ![]() . Розглянемо два часткові випадки та порівняємо
. Розглянемо два часткові випадки та порівняємо ![]() згідно формули (3.11).
згідно формули (3.11).
Спочатку нехай екран достатньо віддалений від землі і знаходиться між джерелом А та приймачем В. Спробуємо екран наблизити до джерела А. Це призведе до того, що ![]() стане на порядок більше
стане на порядок більше ![]() (
(![]() ). Так як
). Так як ![]() , то
, то
 ,(3.14)
,(3.14)
бо це рівносильно умові
 ,
,
а ![]() .
.
З умови (3.13) згідно (3.11) та (3.14) випливає, що
 ,
,
бо ![]() . Отже при наближенні екрана до джерела завад навіть одержали, що
. Отже при наближенні екрана до джерела завад навіть одержали, що ![]() , тобто при наближенні екрана до джерела А наведена на приймачі В напруга
, тобто при наближенні екрана до джерела А наведена на приймачі В напруга ![]() більша наведеної напруги
більша наведеної напруги ![]() без екрана. Аналогічний висновок одержимо при зміщенні екрана до приймача В. В силу симетрії ємностей
без екрана. Аналогічний висновок одержимо при зміщенні екрана до приймача В. В силу симетрії ємностей ![]() та
та ![]() зразу можна стверджувати, що знову одержимо
зразу можна стверджувати, що знову одержимо ![]() . Отже найменша наведена напруга буде при розташуванні плоского екрана рівно по середині між джерелом А та приймачем В.
. Отже найменша наведена напруга буде при розташуванні плоского екрана рівно по середині між джерелом А та приймачем В.
Тепер нехай екран знаходиться по середині між джерелом А і приймачем В. При цьому екран будемо наближати до землі. Це означає, що ![]() >>
>>![]() . Тоді
. Тоді

При граничному переході ![]() , що відповідає заземленню екрана, одержимо, що
, що відповідає заземленню екрана, одержимо, що ![]() . Але в цьому випадку треба враховувати
. Але в цьому випадку треба враховувати ![]() . Хоча значення
. Хоча значення ![]() досить мале, але воно не дорівнює нулеві. Тоді при заземленому екрані
досить мале, але воно не дорівнює нулеві. Тоді при заземленому екрані
 ,
,
оскільки ![]() .
.
Таким чином, найбільшого ефекту екранування можна досягти при заземленому екрані, коли ємності ![]() та
та ![]() закорочуються на землю, а ємність
закорочуються на землю, а ємність ![]() зменшується до величини
зменшується до величини ![]() (за рахунок збільшення довжини силових ліній електростатичного поля між точками А і В). Ефективність екранування
(за рахунок збільшення довжини силових ліній електростатичного поля між точками А і В). Ефективність екранування ![]() .
.
Екран, що погано з’єднаний з землею або має значну індуктивність з’єднуючого провідника (рис.3.10, б), різко знижує ефективність екранування.
Металева кришка (рис. 3.10, а) поліпшує ефективність екранування, хоча й не знаходиться між джерелом А і приймачем В, але при умові, якщо кришка щільно прилягає до корпусу. Тоді ємності ![]() та
та ![]() не зв’язують тіла А і В, а залишиться лише паразитна ємність
не зв’язують тіла А і В, а залишиться лише паразитна ємність ![]() яка набагато менша паразитної ємності
яка набагато менша паразитної ємності ![]() . Якщо ж між кришкою і корпусом буде проміжок, то з’являється вплив
. Якщо ж між кришкою і корпусом буде проміжок, то з’являється вплив ![]() , і як наслідок, вплив ємностей
, і як наслідок, вплив ємностей ![]() та
та ![]() , які значно більші паразитної ємності. Така кришка погіршить ефективність екранування.
, які значно більші паразитної ємності. Така кришка погіршить ефективність екранування.

а)
б)
Рис. 3.10. Вплив характеру заземлення:
а – щільність прилягання металевої кришки,
б – індуктивність провідника з’єднання
При замкнутому електростатичному екрані паразитна ємність ![]() і ефективність екранування
і ефективність екранування ![]() . В реальних конструкціях є отвори для доступу в середину екрана, і оцінити паразитну ємність можна лише експериментально. Якщо отвори і щілини екрана співрозмірні з довжиною електромагнітних хвиль, то через них може проникати електромагнітне поле. Тому отвори і щілини роблять достатньо малими.
. В реальних конструкціях є отвори для доступу в середину екрана, і оцінити паразитну ємність можна лише експериментально. Якщо отвори і щілини екрана співрозмірні з довжиною електромагнітних хвиль, то через них може проникати електромагнітне поле. Тому отвори і щілини роблять достатньо малими.
Ефективність екранування електростатичного поля не залежить від товщини екрана та марки металу, з якого виготовлено екран. Тому часто електростатичні екрани виготовляють в вигляді тонкого шару металізованого діелектрика (нижньої сторони металокерамічного корпуса ІС, пластмасового каркаса екрана котушок індуктивності), що з’єднується з землею.
3.7 Магнітостатичне екранування
Магнітостатичне екранування застосовують для захисту від постійних та слабозмінних магнітних полів з частотою від 0 до 3000 Гц. Екран виготовляють із феромагнітних матеріалів (пермалой, сталь, ферит) з великою відносною магнітною проникністю ![]() . Товщина екрана з металу складає 0,5...1,5 мм. При наявності такого екрана силові лінії магнітного поля Н проходять в основному по його стінках (рис. 3.11), які мають малий магнітний опір в порівняно з опором простору навколо екрана (ефект поглинання). Ефективність екранування таких полів залежить від магнітної проникності екрана і його товщини, а також від наявності стиків і швів, розміщених перпендикулярно до силових ліній магнітного поля. Цей вид екранування називається магнітним шунтуванням.
. Товщина екрана з металу складає 0,5...1,5 мм. При наявності такого екрана силові лінії магнітного поля Н проходять в основному по його стінках (рис. 3.11), які мають малий магнітний опір в порівняно з опором простору навколо екрана (ефект поглинання). Ефективність екранування таких полів залежить від магнітної проникності екрана і його товщини, а також від наявності стиків і швів, розміщених перпендикулярно до силових ліній магнітного поля. Цей вид екранування називається магнітним шунтуванням.
У випадку ![]() ефективність екранування для циліндричного екрана (рис. 3.11, а):
ефективність екранування для циліндричного екрана (рис. 3.11, а):
 , (3.15)
, (3.15)
а для екрана у формі паралелепіпеда (рис. 3.11, б):
 .(3.16)
.(3.16)
а) б)
Рис.3.11. Схема дії низькочастотного екрану:
а – циліндрична форма; б – форма паралелепіпеда
У цілому ефективність магнітостатичних екранів невелика і практично однакова у всьому діапазоні частот. Так екран, виготовлений зі спеціального сплаву “Армко”, у якого ![]() , при радіусі 0,4 м і товщині екрана 0,01 м забезпечує ефективність 31,5 дБ. Щоб забезпечити дуже високу ефективність екранування, використовують кратне екранування, розташовуючи один екран в середині іншого.
, при радіусі 0,4 м і товщині екрана 0,01 м забезпечує ефективність 31,5 дБ. Щоб забезпечити дуже високу ефективність екранування, використовують кратне екранування, розташовуючи один екран в середині іншого.
3.8 Електромагнітне екранування
Електромагнітне екранування застосовують на частотах більших 3000 Гц. Екрани виготовляють із немагнітних і феромагнітних матеріалів. Спрощено суть екранування зводиться до того, що під дією джерела електромагнітного поля на стороні екрана, що обернена до джерела, виникають заряди, а в його стінках-струми, які утворюють в зовнішньому просторі поля, що по напруженості близькі полю джерела, а по напрямку – протилежні йому (рис. 3.12). У результаті в середині екрана відбувається взаємна компенсація полів, а зовні його – витіснення зовнішнього поля полями вихрових струмів (ефект відбиття). Відбувається поглинання полів за рахунок втрат на виділення тепла при протіканні вихрових струмів по стінках екрану та на перемагнічування, якщо екран виконаний з феромагнітного матеріалу. Хоча сталь на високих частотах дає більший екрануючий ефект, ніж немагнітні матеріали, треба враховувати, що стальний екран може викликати значні втрати через свій питомий опір та гістерезис, що призводить до підвищення температури.
![]()
а)б)в)
Рис.3.12. Схема дії високочастотного екрана:
а – зовнішнє поле; б – поле вихрових струмів; в – сумарне поле
Щільність вихрових струмів у металевому екрані зменшується від поверхні в його глибину. Це зменшення тим більше, чим вища частота поля і чим більший питомий опір матеріалу екрана. На низьких частотах, коли товщина екрана менша глибини проникнення, поверхневий ефект можна не враховувати.
При виборі матеріалу і товщини екрана треба враховувати не тільки електричні властивості матеріалу, а й його механічну міцність, корозійну стійкість, зручність виготовлення, забезпечення надійного контакту з шиною нульового потенціалу, тепловідвід тощо.
У конструкціях екранів небажані щілини і отвори, інакше енергія, яка проникає в середину, викличе збудження струмів витоку на внутрішній стороні екрана.
3.9 Електромагнітна сумісність цифрових вузлів
Методи електромагнітної сумісності РЕЗ розповсюджуються на ЕОМ та цифрові технічні засоби обробки сигналів, які є не тільки джерелами завад, а й самі чутливі до сприйняття завад. Забезпечення внутрішньої електромагнітної сумісності стає все більш актуальним в зв’язку з неперервним зменшенням енергії сигналів та ростом взаємного впливу сигналів через збільшення щільності компонування та складності цифрових систем. На цифрові вузли можуть впливати і зовнішні завади, наприклад ті, що проникають по лініям живлення.
Необхідність забезпечення електромагнітної сумісності цифрових систем визначається такими основними факторами: складний характер дискретних імпульсних цифрових сигналів; дією непередбачених схемою паразитних еквівалентних електричних параметрів (розподілених індуктивностей, взаємних індуктивностей, ємностей, омічних опорів провідників друкованого монтажу і елементів несучих конструкцій); схемотехнічних особливостей цифрових інтегральних мікросхем; синхронного та асинхронного характеру процесів тощо.
Здатність цифрових систем протистояти внутрішнім та зовнішнім завадам залежить від основного принципу їх будови, наприклад від вибраної структури сигналів, що передаються. Особливість електромагнітної сумісності цифрових схем зумовлена в основному двома причинами: складним характером імпульсних сигналів та випадковим характером паразитних зв’язків. Рівень внутрішніх завад по напрузі чи струму суттєво збільшується із зменшенням тривалості дії імпульсів завад.
Для систематизації методів забезпечення внутрішньої електромагнітної сумісності цифрових вузлів всі електричні з’єднання умовно поділяють на електрично довгі та електрично короткі. Електрично довгою називається лінія зв’язку, геометрична довжина якої співрозмірна з довжиною хвилі найбільш високочастотної складової спектра дискретного сигналу.
Часто електричну довжину лінії визначають відношенням затримки сигналу в лінії ![]() до тривалості фронту імпульсу
до тривалості фронту імпульсу ![]() . Якщо
. Якщо ![]() >0,1
>0,1![]() , то лінія вважається електрично довгою, якщо
, то лінія вважається електрично довгою, якщо ![]() <0,1
<0,1![]() - електрично короткою. Час розповсюдження сигналів такий, що навіть при
- електрично короткою. Час розповсюдження сигналів такий, що навіть при ![]() =1 вже при геометричній довжині 14..25 мм лінія електрично довга.
=1 вже при геометричній довжині 14..25 мм лінія електрично довга.
Характеристичним параметром електрично довгої лінії є хвильовий опір ![]() , де
, де ![]() - індуктивність лінії, Гн;
- індуктивність лінії, Гн; ![]() - ємність лінії, Ф. При проходженні сигналу по електрично довгій лінії, яка має неоднорідності хвильового опору окремих ділянок, відбувається відбиття падаючого сигналу напруги
- ємність лінії, Ф. При проходженні сигналу по електрично довгій лінії, яка має неоднорідності хвильового опору окремих ділянок, відбувається відбиття падаючого сигналу напруги ![]() або струму
або струму ![]() . Відбитий сигнал накладається на падаючий і спотворює його.
. Відбитий сигнал накладається на падаючий і спотворює його.
Неоднорідність лінії може викликати внутрішній опір генератора сигналів, що підключений до початку лінії, або опір навантаження в кінці лінії, що не дорівнює хвильовому опору лінії зв’язку. Неоднорідність може бути породжена різного виду конструктивно-технологічним виконанням (одиничний об’ємний провідник, друкований провідник, коаксіальний кабель, екранований провідник, контакт з’єднання тощо), технологічними неоднорідностями (коливання товщини чи діелектричної проникності ізоляції коаксіального кабелю) або розгалуженнями лінії.
Відбита енергія характеризується коефіцієнтом відбиття по напрузі (![]() ) або по струму (
) або по струму (![]() ):
):
 ,
,  ,
, ![]() .
.
Амплітуда відбитого імпульсу може бути визначена із відношень ![]() ,
, ![]() .
.
Якщо лінія на своєму кінці навантажена на опір ![]() (лінія узгоджена в кінці), то перепад напруги, діставшись через час
(лінія узгоджена в кінці), то перепад напруги, діставшись через час ![]() кінця лінії, не спотворюється, оскільки коефіцієнт відбиття по напрузі
кінця лінії, не спотворюється, оскільки коефіцієнт відбиття по напрузі ![]() =0 і тому
=0 і тому ![]() =0. Якщо лінія не узгоджена з одного або з двох кінців, то спотворення носять аперіодичний чи коливальний характер. При аперіодичному характері перехідного процесу швидкодія цифрових вузлів зменшується, оскільки зростає час зростання амплітуди сигналу до номінального значення і потрібно зменшити тактову частоту подачі імпульсів. При коливальному характері перехідного процесу може виникнути помилкове спрацювання логічних елементів через значну амплітуду коливання сигналу біля порогового значення. Крім того, викиди напруги можуть привести до пробою p-n-переходів напівпровідникових приладів чи до насичення транзисторів логічних елементів, що також знизить швидкодію.
=0. Якщо лінія не узгоджена з одного або з двох кінців, то спотворення носять аперіодичний чи коливальний характер. При аперіодичному характері перехідного процесу швидкодія цифрових вузлів зменшується, оскільки зростає час зростання амплітуди сигналу до номінального значення і потрібно зменшити тактову частоту подачі імпульсів. При коливальному характері перехідного процесу може виникнути помилкове спрацювання логічних елементів через значну амплітуду коливання сигналу біля порогового значення. Крім того, викиди напруги можуть привести до пробою p-n-переходів напівпровідникових приладів чи до насичення транзисторів логічних елементів, що також знизить швидкодію.
Відбиття імпульсів в електрично коротких лініях не шкідливе через їх малу тривалість порівняно з тривалістю фронту. Завади в електрично коротких лініях зв’язку виникають між різними електричними з’єднаннями та різними компонентами в межах одного з’єднання. Хоча в цифрових вузлах застосовується схеми з малим коефіцієнтом підсилення по напрузі, наявність великого числа паралельних зв’язків, а також висока щільність компонування вимагає спеціальних заходів для забезпечення електромагнітної сумісності в коротких лініях. Паразитні зв’язки визначаються конструкцією вузлів та параметрами матеріалів (особливо діелектричною проникністю). Всі види внутрішніх паразитних зв’язків ділять на ємнісні, індуктивні і кондуктивні. Якщо сигнал (його спектральна складова), що наводить заваду, має гармонічний характер, то незалежно від характеру зв’язку амплітуда завади може бути визначеною за формулою
 .
.
Щоб оцінити очікуване спотворення сигналів і завад треба скласти еквівалентну електричну схему і розрахувати електричні параметри лінії зв’язку (![]() ,
,![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ), враховуючи конструктивні дані (геометричні розміри, фізичні параметри матеріалів, конструктивне виконання, кількість та взаємне розташування ліній зв’язку).
), враховуючи конструктивні дані (геометричні розміри, фізичні параметри матеріалів, конструктивне виконання, кількість та взаємне розташування ліній зв’язку).
Взаємну ємність ![]() між двома провідниками, що розташовані з однієї або з двох сторін друкованої плати (ДП), можна визначити за формулою
між двома провідниками, що розташовані з однієї або з двох сторін друкованої плати (ДП), можна визначити за формулою
![]() ,
,
де ![]() - питома ємність лінії, пФ/см;
- питома ємність лінії, пФ/см;
L1 - довжина взаємного перекриття провідників, см (рис.3.13 а);
![]() - приведена (ефективна) діелектрична проникність середовища,
- приведена (ефективна) діелектрична проникність середовища, ![]() .
.
![]()
εo≈εплεo<<εпл
а) б) в)
Рис. 3.13. Взаємна індукція провідників ДП: а – схема взаємного розташування; б – приведена діелектрична провідність εер при εер≈εпл; в – εер при εo<<εпл.
Наявність ізоляційної основи з великим значенням діелектричної проникності εпл є причиною виникнення великих паразитних ємнісних зв’язків і власної ємності між двома провідниками.
Значення питомої ємності лінії ![]() суттєво залежить від параметрів конструкції, конструкційного виконання, кількості та взаємного розташування ліній зв’язку, геометричних розмірів, фізичних параметрів тощо. В довідниках наведені формули визначення
суттєво залежить від параметрів конструкції, конструкційного виконання, кількості та взаємного розташування ліній зв’язку, геометричних розмірів, фізичних параметрів тощо. В довідниках наведені формули визначення ![]() та
та ![]() для характерних випадків. Питому ємність провідників друкованих плат зручно визначати, користуючись графічними залежностями для чотирьох типових випадків:
для характерних випадків. Питому ємність провідників друкованих плат зручно визначати, користуючись графічними залежностями для чотирьох типових випадків:
1 – провідники односторонньої ДП при ![]() ;
;
2 – провідники односторонньої ДП при ![]()
![]()
![]() /3;
/3;
3 – провідники двосторонньої ДП при ![]() ;
;
4 – провідники двосторонньої ДП при ![]()
![]()
![]() . (рис.3.14).
. (рис.3.14).
 Рис.3.14. Питома взаємна ємність провідників ДП у вакуумі
Рис.3.14. Питома взаємна ємність провідників ДП у вакуумі
В довідниках наведені аналогічні графіки для визначення хвильового опору зовнішніх і внутрішніх провідників ДП різного конструктивного виконання та хвильового опору друкованих ліній.
Графіком зручно користуватись для визначення величини ![]() , а для більш змістовного аналізу способів зменшення
, а для більш змістовного аналізу способів зменшення ![]() зручніше користуватись відповідною аналітичною формулою. Для типового випадку 1 маємо формулу:
зручніше користуватись відповідною аналітичною формулою. Для типового випадку 1 маємо формулу:
 .
.
Звідси можна вказати такі способи зменшення ![]() :
:
· збільшення відстані d між провідниками;
· зменшення ширини проводів ![]() та
та ![]() , якщо це можливо;
, якщо це можливо;
· зменшення довжини одного з проводів, тобто зменшення L1.
Взагалі до схемотехнічного зменшення завад в електричних з’єднаннях відносяться:
- використання елементної бази з максимальною завадостійкістю;
- застосування LC-фільтрів в колах живлення;
- компенсація завад (наприклад, скручених пар провідників) тощо.
До конструктивних методів відносяться:
- зменшення числа конструкторсько-технологічних типів ліній зв’язку в одному колі;
- ослаблення паразитного зв’язку шляхом рознесення джерел і приймачів завад або шляхом ортогонального розташування провідників в сусідніх парах ДП, зменшення довжини взаємодіючих ділянок, використання матеріалів з малою діелектричною проникністю;
- збільшення числа точок заземлення і шин живлення;
- часткове екранування ДП та введення міжобмоточних екранів в трансформаторах;
- зменшення розмірів контактних з’єднань, наприклад, шляхом заміни роз’ємних з’єднань нероз’ємними.
До технологічних методів відносяться:
- покращення однорідності ліній певного технологічного виконання (друкований провідник, коаксіальний кабель тощо);
- зменшення розкиду параметрів елементів схеми за рахунок виготовлення їх в одному технологічному циклі (наприклад, пар транзисторів);
- освоєння виробництва виробів з покращеними властивостями (кабельні вироби з екраном, еластомірні контакти).
Висновки
Конструювання обчислювальної техніки описано як складова більш широкого процесу, пов’язаного із розробкою технічного проекту, виробництвом і експлуатацією виробу. Оскільки процес конструювання не можна звести до окремих конструкторських рішень, прикладів та рекомендацій, тому велику увагу приділено створенню у студентів правильного й змістовного уявлення про загальні закономірності конструювання, його проблеми та перспективи.
Сучасне проектування ОТ вимагає системного підходу, при якому всі фізичні процеси розглядаються у взаємодії. Найбільше впливають на функціональні показники обчислювальної техніки електричні, електромагнітні, теплові та механічні процеси. Врахування взаємозв’язку між процесами можливе завдяки побудові фізичних і математичних моделей пристроїв, що потребує широкого використання комп’ютерної техніки.
При розгляді теплових процесів описано три види теплообміну: теплопровідність, конвекцію, випромінювання. Розглянуто передачу теплової енергії через плоскі й циліндричні стінки, способи збільшення теплопровідності. Описано теплові режими РЕЗ при нагріванні тіла внутрішнім і зовнішнім середовищем, методику розрахунку температур в різних зонах приладу. Розглянуто системи охолодження РЕЗ, зокрема вільне і примусове повітряне охолодження, вільне і примусове рідинне охолодження.
Механічні процеси суттєво впливають на надійність роботи РЕЗ, особливо небезпечними є механічні коливання на базі пружних елементів. Рівень коливань визначається за допомогою відповідної динамічної моделі, яка враховує інерційні, пружні, дисипативні та силові параметрів. Динамічну модель досить часто вдається спростити за рахунок приведення мас, сил, пружних параметрів і параметрів дисипації. Розглянуто вільні та вимушені коливання одномасової системи, віброзахист обчислювальної техніки, явище резонансу, види амортизаторів та схеми їх розташування.
Врахування електромагнітної сумісності є необхідним для забезпечення нормального функціонування виробів поруч з іншими виробами в умовах дії між ними та на них додаткових електромагнітних полів при виготовлені та експлуатації. Розглянуто джерела і приймачі завад, способи екранування електростатичного, магнітного та електромагнітного полів.
Перелік умовних позначень
ВЧ – високі частоти
ДЗ - джерела завад
ДП - друкована плата
ЗЗ - зв’язки завад
ІС – інтегральна схема
НЧ – низькі частоти
ОТ – обчислювальна техніка
ПЗ - приймачі завад
ПЧ – проміжні частоти
РЕЗ - радіоелектронний засіб
СЗТР - системами забезпечення теплового режиму
СО - системи охолодження
СТ - системи термостабілізації
ЦЖ - центр жорстокості
ЦМ - центр мас
Список літератури
1. Домнич В.И., Зинковский Ю.Ф. Конструирование РЭС. Оценка и обеспечение тепловых режимов. – К.: УМК ВО, 1990. – 240 с.
2. Дульнев Г.Н. Тепло- и массообмен в радиоэлектронной аппаратуре. – М.: Высшая школа, 1984. – 247 с.
3. Ненашев А.П. Конструирование радиоэлектронных средств. – М.: Высшая школа, 1990. – 432 с.
4. Справочник конструктора РЭА. Общие принципы конструирования / Под ред. Р.Г.Варламова. – М.: Сов. радио, 1980. – 480 с.
5. Фролов А.Д. Теоретические основы конструирования и надежности РЭА. – М.: Высшая школа, 1970. – 485 с.
6. Зелик А.Є. Програма, методичні вказівки і контрольне завдання з курсу „Основи конструювання і технології РЕЗ”. – Чернівці: Рута, 1994. – 47 с.
7. Зелик А.Є. Основи конструювання і технології радіоелектронних засобів. Навч. посібник до лаб. практикуму. – Чернівці: Рута, 1994. – 82 с.
8. Мюллер Скотт. Модернизация и ремонт ПК. - 12-е изд. - М.: Вильямс, 2001. – 1162 с.
9. Суровцев Ю.А. Амортизация радиоэлектронной аппаратуры. – М.: Сов. радио, 1974. – 160 с.
10. Барнс Д. Электронное конструирование: Методы борьбы с помехами. – М.: Мир, 1990. – 237 с.
11. Таненбаум Э. Архитектура компьютера. - 4-е изд. – СПб.: Питер, 2003. – 698 с.
12. Бабич М.П., Жуков І.А. Комп’ютерна схемотехніка: Навчальний посібник. – К.: МК-Прес, 2004. – 412 с.
13. Бройдо В. Л., Ильина О. П. Архитектура ЭВМ и систем: Учебник для вузов. – М.: Питер, 2005. – 720 с.
14. Цилькер Б.Я., Орлов С.А. Организация ЭВМ и систем: Учебник для вузов. - М.: Питер, 2005. – 672 с.