| Скачать .docx |
Реферат: Методы поиска отказов
МIНIСТЕРСТВО ОСВIТИ IНАУКИ УКРАЇНИ
ХАРКIВСЬКИЙ НАЦІОНАЛЬНИЙ УНIВЕРСИТЕТ РАДIОЕЛЕКТРОНIКИ
Кафедра ТАВР
КОНТРОЛЬНА РОБОТА
з дисципліни
“ ТЕХНІЧНА ДІАГНОСТИКА, КОНТРОЛЬ ТА ВИПРОБУВАННЯ ЕЗ “
МЕТОДЫ ПОИСКА ОТКАЗОВ
Харків 2009
Поиск, отказа — диагностирование, целью которого является определение места и при необходимости причины и вида отказа объекта.
Состояние S каждого объекта в данный момент времени определяется значениями ряда независимых величин (параметров) ![]() , которые являются мерами его качеств. В совокупности одинаковых объектов значения параметров каждого объекта всегда несколько отличаются от заранее предопределенных номинальных эталонных значений
, которые являются мерами его качеств. В совокупности одинаковых объектов значения параметров каждого объекта всегда несколько отличаются от заранее предопределенных номинальных эталонных значений ![]() вследствие допусков производства, неоднородности элементов, старения и изнашивания, влияния условий эксплуатации и, наконец, вследствие дефектов элементов.
вследствие допусков производства, неоднородности элементов, старения и изнашивания, влияния условий эксплуатации и, наконец, вследствие дефектов элементов.
Следовательно, параметры каждого конкретного объекта являются случайными величинами, если рассматривать всю совокупность объектов данного типа.
Техническое диагностирование, т. е. процесс определения технического состояния объекта, сводится к проведению элементарных проверок, представляющих собой эксперимент (не подлежащий расчленению в данных конкретных условиях) над объектом диагностирования, характеризующийся определенным входным воздействием, поступающим на объект, и составом контрольных точек, с которых снимается отклик объекта на это воздействие — результат элементарной проверки, и к сопоставлению случайных значений параметров конкретного объекта с их номинальными значениями. Заключение о состоянии объекта (диагноз) делается на основе результатов этого сопоставления. Процесс технического диагностирования по отношению к объекту является пассивным актом и никакого влияния на состояние самого объекта не оказывает. (Здесь не рассматриваем случаи, когда в процессе технического диагностирования происходят изменения состояния, обусловленные несовершенством самого процесса.).
Естественно, что процесс технического диагностирования не является самоцелью и необходим лишь для того, чтобы на основе его результатов можно было произвести необходимые активные воздействия на объект: регулировку, замену дефектных элементов, ремонт и т. п. К числу активных воздействий можно отнести иучет результатов диагноза при дальнейшем использовании объекта.
Непосредственное определение параметров состояния объект и сопоставление их с эталонными значениями возможно лишь в некоторых частных случаях (для таких параметров, как линейные размеры, масса и т. п.). Как правило, диагностирование сводится к измерению некоторых величин — диагностических признаков ![]() которые связаны с параметрами определенными зависимостями, ксравнению значений
которые связаны с параметрами определенными зависимостями, ксравнению значений ![]() или вычисленных значений
или вычисленных значений ![]() с номинальными, к анализу результатов сравнения с целью получения заключения о состоянии.
с номинальными, к анализу результатов сравнения с целью получения заключения о состоянии.
Если при определении состояния установлено, что объект диагностирования неработоспособен, то возникает необходимость поиска места отказа.
Опыт эксплуатации сложных систем показывает, что время поиска отказов существенно больше времени устранения их. Поэтому такое большое внимание уделяется разработке методов их обнаружения и поиска, на основе которых можно вручную или автоматически в наиболее короткий срок определить отказавший элемент системы.
Наличие отказов в системе проявляется в изменении ее параметров и, следовательно, диагностических признаков. Измерения диагностических признаков, пли, как их принято называть, проверки, и анализ их результатов позволяют установить место отказа.
Одна из основных задач технического диагностирования — составление алгоритмов поиска, для сравнения которых используют некоторые критерии эффективности: средние затраты на поиск отказа, среднее время поиска отказа и т. п. Составление алгоритмов связано с решением задачи оптимизации — нахождением алгоритма, критерий оценки которого имеет минимальное (максимальное) или близкое к нему значение. Нахождение такого алгоритма связано с большими трудностями, поэтому для решения задачи оптимизации предложен ряд методов, целесообразность применения которых обусловлена характером исходной информации и сложностью объекта.
При описании состояния методами математической логики не учитывают вероятности появления отказов в системе. В таблице состояний на равных правах представлены как наиболее вероятные состояния системы, так и такие, в которых практически система никогда не находится (с большим числом отказов). Для того чтобы исключить этот недостаток, таблицу дополняют данными, характеризующими вероятности состояния p
(
si
)
, используя для этого экспериментальные данные (![]() -характеристики элементов). В качестве объективной характеристики неопределенности состояния системы для наблюдателя до начала процесса диагностирования можно принять энтропию системы:
-характеристики элементов). В качестве объективной характеристики неопределенности состояния системы для наблюдателя до начала процесса диагностирования можно принять энтропию системы:
 ,
,
где N — число возможных состояний системы;
Информацию о состоянии получают в процессе диагностирования, проводя проверки объекта, т. е. измеряя некоторые признаки. Количество информации, которое содержит каждая проверка ![]() , относительно состояния системы S,
, относительно состояния системы S,
![]() ,
,
где ![]() — усредненное значение энтропии при условии проведения проверки
— усредненное значение энтропии при условии проведения проверки ![]() .
.
Каждую проверку ![]() ,т. е. процесс получения каждого диагностического признака, можно характеризовать рядом показателей, к числу которых относятся:
,т. е. процесс получения каждого диагностического признака, можно характеризовать рядом показателей, к числу которых относятся: ![]() — время, необходимое для измерения данного признака с заданной точностью;
— время, необходимое для измерения данного признака с заданной точностью; ![]() — дополнительная масса устанавливаемого на самолет оборудования, необходимого для съема, преобразования и нормализации диагностического признака;
— дополнительная масса устанавливаемого на самолет оборудования, необходимого для съема, преобразования и нормализации диагностического признака; ![]() — стоимость этого дополнительного оборудования.
— стоимость этого дополнительного оборудования.
Как правило, при разработке системы диагностирования оптимизация системы проводится по одному из этих факторов, а на другие накладываются ограничения. В качестве критерия оптимальности принимается минимум средних потерь (например, минимум среднего времени поиска дефектных состояний):
 ,(1.1)
,(1.1)
где C ( st ) — затраты, связанные с проведением проверок, требуемых при поиске st состояния;
p ( st ) — вероятность состояния st .
Если известны только затраты C ( st ) , а сведения о вероятности наличия дефектных элементов отсутствуют, то можно использовать минимаксный критерий. Максимально возможные затраты, связанные с проведением требуемых проверок, должны быть минимальными:
 ,(1.2)
,(1.2)
Для случая, когда все состояния системы равновероятны, а стоимости определения диагностических признаков одинаковы, может быть использован наиболее общий способ отыскания всех неизбыточных, в том числе минимальных, совокупностей диагностических признаков. Способ состоит в определении логических функций различия состояний. Запись производится в конъюнктивно-дизъюнктивной форме, а потом преобразуется в дизъюнктивно-конъюнктивную.
Таблица 1.1
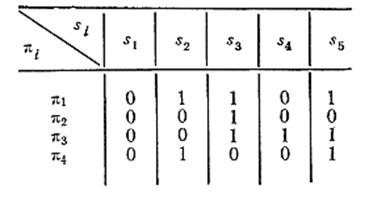
Для получения всех наборов диагностических признаков (тестов), позволяющих различать отказы, из таблицы состояний попарным сопоставлением выписывают проверки, значениями которых они различаются. Так, для объекта диагностирования, заданного табл. 1.1, состояния отличаются признаками:
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() .
.
Найдем конъюнктивно-дизъюнктивную форму функций различия состояний

и после логического перемножения этих сумм в форме дизъюнкции конъюнкций ЕП найдем все неизбыточные наборы признаков:
![]() .
.
При рассмотрении безусловного алгоритма поиска (метод время—вероятность) элементы объекта контроля соединены произвольно и проверяются по одному в определенной, заранее заданной последовательности. Если проверяемый элемент оказывается исправным, то проводится проверка следующего, если неисправным, то поиск прекращается и объект восстанавливается. Качество алгоритма оценивается средним временем поиска неисправного элемента.
Допустим, что имеется ОД, состоящий из nэлементов, один из которых имеет отказ. Условные вероятности отказов элементов обозначим ![]() ,
, ![]() , а время, необходимое для проверки
, а время, необходимое для проверки ![]() состояния i-го элемента, —
состояния i-го элемента, —![]() .
.
Для произвольного алгоритма диагностирования П1 , составленного, например, в соответствии с нумерацией элементов, математическое ожидание времени поиска
![]() .
.
Если переменить порядок проверок (например, ![]() и
и ![]() ), то для второго алгоритма поиска
), то для второго алгоритма поиска
![]()
Разность математических ожиданий времени поиска по алгоритмам П1 и П2
![]() .
.
Очевидно, что алгоритм П1 эффективнее алгоритма П2 , если
![]() .
.
Таким образом, упорядочив проверки в соответствии с отношением получим алгоритм, при осуществлении которого математическое ожидание времени поиска минимально. В этом случае, если после проведения n— 1-й проверки, отказавший элемент не обнаружен, то вследствие ![]() следует за отказавший элемент принять последний и можно не тратить времени на его проверку. Учет этого факта (так называемый концевой эффект) дает дополнительное уменьшение средних потерь при поиске отказавшего элемента на
следует за отказавший элемент принять последний и можно не тратить времени на его проверку. Учет этого факта (так называемый концевой эффект) дает дополнительное уменьшение средних потерь при поиске отказавшего элемента на ![]() .
.