| Скачать .docx |
Курсовая работа: Разработка системы непрерывного управления скоростью асинхронного двигателя с фазным ротором с помощью импульсно-ключевого регулятора добавочного сопротивления роторной цепи
Введение
Современный электропривод состоит из большого числа разнообразных деталей, машин и аппаратов, выполняющих различные функции. Все они в совокупности совершают работу, направленную на обеспечение определенного производственного процесса. Наиболее важным элементом является система управления электроприводом (СУЭП). От правильного функционирования системы управления зависит состояние объекта управления и правильности отработки заданных параметров.
В настоящее время СУЭП решает несколько важных задач:
Формирование статических механических характеристик электропривода с целью стабилизации скорости (или момента), расширение диапазона регулирования скорости, ограничение перегрузок, формирование адаптивных систем.
Оптимизация переходных режимов с целью повышения быстродействия, снижения динамической ошибки, ограничение ускорения, рывков и т.д.
Целью данного курсового проекта является разработка системы непрерывного управления скоростью асинхронного двигателя с фазным ротором с помощью импульсно-ключевого регулятора добавочного сопротивления роторной цепи.
Также необходимо разработать принципиальную схему, с выбором ее элементов, и предложить вариант реализации блока управления.
1. Определение структуры и параметров объекта управления
В задании на курсовой проект в качестве исполнительного двигателя используется асинхронный двигатель с фазным ротором типа МТН112-6. Данный двигатель наиболее часто применяется в краново-металлургическом производстве. Приведем паспортные данные для двигателя:
Номинальная мощность P2н=15 кВт;
Номинальное напряжение статора (питания) Uн=380 В;
Номинальное напряжение ротора U2ф=219 В;
Номинальная частота вращения nном=955 об/мин;
Критический момент Ммах=380 Нм;
Номинальный ток статора I1н=38 А;
Номинальный ток ротора I2н=46 А;
Коэффициент мощности cosj=0.73;
Коэффициент полезного действия h=82%;
Момент инерции ротора Jp=0.313 кгм2;
Класс нагревостойкости - Н;
Степень защиты IP44.
Определим необходимые параметры двигателя:
Номинальная скорость двигателя:
![]()
Скорость холостого хода:
![]()
Номинальный момент двигателя:
![]()
Номинальное скольжение двигателя:
![]()
Критическое скольжение двигателя:
![]()
Отношения сопротивлений:

Сопротивление статора:
 Ом
Ом
Приведенное сопротивление ротора:
![]() Ом
Ом
Индуктивное сопротивление короткого замыкания:
![]() Ом
Ом
Так как Xk=X1 +X2 ’, причем X1 »X2 ’ примем: X1 =0.68 Ом, X2 ’=0.7 Ом.
Рассчитаем коэффициент приведения сопротивления Кr :

Определяем сопротивления ротора:
![]() Ом
Ом
![]() О
О
Исходя из задания, силовой канал представляем следующим образом (рис.1):

рис.1. На представленной схеме: М – асинхронный двигатель с фазным ротором; BR – тахогенератор; U1 – трехфазный мостовой выпрямитель, включенный в цепь ротора; ДТ – датчик тока; Rd – добавочное сопротивление, шунтированное ключом с частотой коммутации fk=3кГц; К – коммутатор; СУ – система управления.
Дополнительный резистор Rd включен в цепь ротора через неуправляемый выпрямитель U1. Коммутатор (ключ) К периодически закорачивает сопротивление Rd, причем скважность g= tвкл/Тком может изменяться внешним сигналом Uzc в пределах от 0 до 1. При g=0 т.е. при не включенном коммутаторе, сопротивление роторной цепи составит Rr+Rd, что определит механическую характеристику 2 (рис.2). При g=1 (ключ включен постоянно) Rd=0 и двигатель работает на характеристике 1, близкой к естественной (рис.2). Плавное изменение величины скважности в пределах 0< g<1 обеспечивает семейство характеристик, расположенные между характеристиками 1 и 2. Величина g в данном случае зависит от величины тока и скорости. Импульсно-ключевой способ управления АД имеет ряд преимуществ: Высокое быстродействие; Переход с характеристики на характеристику при переходных процессах плавный, без скачков тока и момента, что повышает надежность системы.
Наряду с этими достоинствами данный способ имеет очень существенный недостаток: Регулирование скорости осуществляется путем повышения скольжения, что приводит к увеличению потерь. Поэтому ИКР следует применять только в старых электроприводах в качестве их модернизации, и то только тогда, когда двигатель работает на низких скоростях непродолжительное время.
2. Расчет характеристик асинхронного двигателя
По уточненной формуле Клосса рассчитываем значения момента и скорости:

Результаты вычислений сведены в таблицу 1.
Тб.1
| S | 1 | 0.9 | 0.8 | 0.6 | 0.5 | 0.4 | 0.3 | 0.285 | 0.25 | 0.2 |
| W рад/с | 0 | 10.5 | 20.9 | 41.9 | 52.4 | 62.8 | 73.3 | 73.4 | 78.5 | 83.8 |
| M Нм | 259 | 282.4 | 308.8 | 375.1 | 414.6 | 453.8 | 478.2 | 480 | 477.6 | 450.1 |
| S | 0.1 | 0.09 | 0.05 | 0.045 | 0 |
| W рад/с | 94.2 | 95.3 | 99.5 | 100 | 104.7 |
| M Нм | 301.2 | 276.5 | 156.5 | 159 | 0 |
Естественная характеристика представлена на рис.2
Определим рабочую область электропривода:
Скорость: Wo(0.05…0.5)=5.235¸52.35 рад/с;
Момент: Мн(0.2…1)=30¸150 рад/с;
На рис.2 эта область выделена штриховкой. В режиме ИКР двигатель работает на семействе характеристик с постоянно меняющейся жесткостью (из-за постоянного изменения сопротивления Rd ). Максимальное значение сопротивления соответствует точке А, рассчитываем его величину по формуле:
 ,
,
где: S’k – критическое скольжение на характеристике 2;
S’н – номинальное скольжение на этой характеристике;
Мн – момент нагрузки (для точки А равен 30 Нм).
Находим номинальное скольжение S’н = 0.95
С помощью программного пакета MATHCAD находим значение критического скольжения на характеристике 2: S’k =7.27 , тогда:
R2’max= S’k *Xk=7.27*1.38=10.03 Ом;
R2’д=R2’maх-R2’=10.03-0.4=9.63 Ом;
R2д= R2’д/Kr=9.63/1.21=7.96 Ом.

Рис.2
Приведем эквивалентную схему замещения объекта управления относительно выпрямленного тока Id:

![]() - скважность;
- скважность;
 , где:
, где:
Kcx – коэффициент схемы, принимаем равным 1.35
3. Разработка алгоритма управления и расчет параметров элементов структурной схемы
Согласно эквивалентной схеме замещения запишем следующие дифференциальные уравнения:
![]()

где: ![]()
Данный объект нелинейный, т.к. присутствуют g*Id, Id2 и т.д. Рассмотрим линеаризацию объекта, и запишем уравнения в приращениях:

где: ![]()
![]() .
.
Целесообразно использовать двухконтурную систему подчиненного регулирования координат с внутренним контуром выпрямленного тока. Исходя из линеаризованных дифференциальных уравнений, получим следующую структуру (рис.3):

рис.3
Данная структура представлена в общем виде. Определяем параметры объектов: Рассчитаем максимальную электромагнитную постоянную времени и минимальную электромеханическую постоянную, и определим их соотношение:
![]()

Найдем отношение постоянных времени:
![]()
Т.к. отношение m>>8, следовательно, при расчетах мы можем пренебречь влиянием обратной связи по ЭДС двигателя.
Для определения коэффициентов двигателя Се и См рассчитаем значение Idнач из формулы:

Для найденного значения Idнач рассчитаем коэффициенты Се и См по формулам:
Определим значение эквивалентного сопротивления:
![]() ;
;
примем среднее значение![]() =0.5, S=0.95 Þ
=0.5, S=0.95 Þ
![]()

Т.к. эквивалентная электромагнитная постоянная времени соизмерима с постоянной времени преобразователя, то мы не можем пренебречь дискретностью преобразователя. Для искусственного увеличения Тэ введем в цепь ротора дополнительный реактор с индуктивностью Ld’=6мГн.
 Þ
Þ
Дискретность широтно-импульсного преобразователя можно не учитывать. Коэффициент передачи ШИМ примем равным Кшим=1.
![]()
Произведем настройку контура тока на технический оптимум. Рассчитаем необходимый регулятор тока:
![]()
за малую постоянную времени примем:![]()
Кot – коэффициент обратной связи по току Id.
![]()
![]() ;
;
итак, получили ПИ – регулятор тока, с постоянной Тpt=0.059.
Передаточную функцию замкнутого контура тока представим в виде:
![]()
Контур скорости также настроим на технический оптимум:
![]() ;
;
Кос – коэффициент обратной связи по скорости
![]()
![]()
Мы получили П – регулятор скорости Крс=22
4. Расчет динамических характеристик
Расчет динамических характеристик проведем с помощью комплекса МИК-АЛ, используя структуру на рис.3 (но с учетом упругой механической части). Ниже приведена программа моделирования данного объекта:
$Ввод *kurs
КОНСТ
Uu=1,Mc=10.3,Kрc=22,Tрт=0.059,Kшим=1,Udn=509.44,L=0.0104,
J1=0.78,Koc=0.147,Kот=0.156
17V V=Uu
111U W=1 Вх=17
1U W=Kрc Вх=111+15
2N огран пар=10 Вх=1
3L W=1/Tрт*p Вх=2+16
4N огран пар=10 Вх=3
5U W=Kшим Вх=4
6U W=Udn Вх=5
7L W=1/L*p Вх=6+100+200
*Cm*
21U W=1.05 Вх=7
*Ce*
100U W=-1.85 Вх=9
*R*
200U W=-40.6 Вх=7
9L W=1/J1*p Вх=21+14
14V V=-Mc
15U W=-Koc Вх=9
16U W=-Kот Вх=7
Инт RKT4
Нач вр=0
Кон вр=0.65
Шаг инт=0.0001
шаг выв=0.001
Вывод 7,21,9
Выходы 7=I,21=M,9=w1
Диспл 7,21,9
$Кон
$Стоп
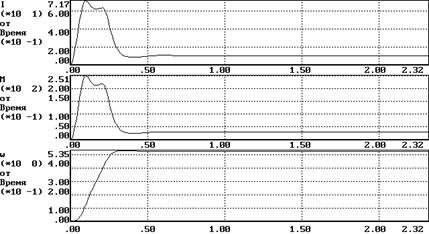
Результаты моделирования представлены в виде графиков:
1.Пуск на минимальную скорость при минимальном моменте сопротивления (Uy=1, Mc=30 Нм)

Время регулирования (время вхождения в пятипроцентный коридор) tр=0.2 с;
Перерегулирование s=0.2%;
Ошибка DWуст=0.038рад (DWмах=0.0524 рад)
2.Пуск на минимальную скорость при максимальном моменте сопротивления (Uy=1, Mc=150 Нм)

3.Пуск на максимальную скорость при минимальном моменте сопротивления (Uy=10, Mc=30 Нм)

Время регулирования (время вхождения в пятипроцентный коридор) tр=0.5 с;
Перерегулирование s=1%
Ошибка DWуст=0.41рад (DWмах=0.52 рад);
4.Пуск на максимальную скорость при максимальном моменте сопротивления (Uy=10, Mc=150 Нм)

Как видно из приведенных графиков, результаты не только не удовлетворяют техническому заданию, но и смоделированная структура не отражает в полном объеме свойств системы.
Заменим в структуре постоянные коэффициенты См, Се, R на переменные, в соответствии со следующими формулами:
 ,где S, g, Id – переменные.
,где S, g, Id – переменные.
Для улучшения свойств системы, введем адаптивный регулятор с эталонной моделью, формирующей оценку управляющей координаты при настройке контура на технический оптимум с постоянной времени Тm=0.002 с.
Передаточная функция эталонной модели составляет два последовательно соединенных звена ![]() ,
, ![]() , охваченных отрицательной единичной обратной связью. Передаточная функция замкнутого контура ЭМ имеет вид:
, охваченных отрицательной единичной обратной связью. Передаточная функция замкнутого контура ЭМ имеет вид:
![]()
Суммарная структурная схема представлена на рис.4.
В процессе моделирования экспериментально подбираем значения следующих коэффициентов:
Коэффициент П - регулятора скорости (Крс=10),
Коэффициент усиления адаптивного регулятора (Kку=30).
Листинг модели.
$ввод
*kurs
констUu=1,Mc=150,Krs=10,Trt=0.059,Ksh=1,Udn=509.44,L=0.0104,
J1=0.78,Koc=0.147,Kot=0.156,R1=0.77,
R2=0.33,Edo=295.6,Rd=7.96
17V V=Uu
111U W=1 bx=17
555l W=1/0.000008p2+0.004p+1 en=111
557U W=30 en=555+558
558U W=-0.147 en=9
1U W=Krs bx=111+15
2N огран пар=10 bx=1+557
3L W=1/Trt*p bx=2+16
4N огран пар=10 bx=3
5U W=Ksh bx=4
6U W=Udn bx=5
7L W=1/L*p bx=6+100+200
*Cm*
8U W=-2*R1 bx=7
20V V=Edo
1111U W=0.00955 bx=7+20
21N умн bx=1111+7
*21U W=1.88 bx=7
*Ce*
22U W=-R1 bx=7
23V V=Edo
24U W=0.00955 bx=22+23
99N умн bx=24+9
100U W=-1 bx=99
*100U W=-2.35 bx=9
*R*
25U W=-1 bx=5 *gamma*
26V V=1
27U W=Rd bx=26+25 *Rd*(1-gamma)*
28V V=2*R2
29U W=-1 bx=9 *-W1*
30V V=104.7
31U W=0.00955 bx=30+29 *S*
125U W=2*R1 bx=31
199U W=-1 bx=125+27+28 *-R*
200N умн bx=199+7
*200U W=-5.37 bx=7
9L W=1/J1*p bx=21+18
15U W=-Koc bx=9
16U W=-Kot bx=7
32N реле пар=Mc bx=9
18U W=-1 bx=32
инт RKT4
нач вр=0
кон вр=0.3
шаг инт=0.0001
шаг выв=0.001
вывод 7,21,9
выходы 7=I,21=M,9=w
диспл 7,21,9
$кон
$стоп
Ниже приведены результаты моделирования. Как видно из графиков, спроектированная система практически полностью удовлетворяет требованиям технического задания.
1.Пуск на минимальную скорость при минимальном моменте сопротивления (Uy=1, Mc=30 Нм)
Время регулирования (время вхождения в пятипроцентный коридор) tр=0.06 с;
Перерегулирование s=1.5% ;
Ошибка DWуст=0.035рад (DWмах=0.0525 рад);
2.Пуск на минимальную скорость при максимальном моменте сопротивления (Uy=1, Mc=150 Нм)

Время регулирования (время вхождения в пятипроцентный коридор) tр=0.067 с;
Перерегулирование s=1% ;Ошибка DWуст=0.01рад (DWмах=0.0525 рад);
3.Пуск на максимальную скорость при минимальном моменте сопротивления (Uy=10, Mc=30 Нм)

Время регулирования (время вхождения в пятипроцентный коридор) tр=0.23 с;
Перерегулирование s=0.1% ;
Ошибка DWуст=0.4рад (DWмах=0.525 рад)
4.Пуск на максимальную скорость при максимальном моменте сопротивления (Uy=10, Mc=150 Нм)

Время регулирования (время вхождения в пятипроцентный коридор)tр=0.61 с;
Перерегулирование s=0.3%;
Ошибка DWуст=0.45 рад (DWмах=0.525 рад);
5. Разработка принципиальной схемы и выбор ее элементов
Выбор элементов эталонной модели.
Представим схемную реализацию эталонной модели:

рис.5
Выбираем прецизионные операционные усилители DA1 и DA2 серии КР140УД25А. Параметры ОУ: Uпит=±15 В, Iпотр=5 мА, напряжение смещения Uсм=0.03 мВ.
Примем емкость С1 и С2 – по 0.5мкФ
Выбираем конденсаторы К71-7-0.5мкФ±0.5%
Исходя из того, что Тm=0.002 с, рассчитаем величины сопротивлений R1, R2, R3

Выбираем:
R1,R3 – C2-29B-0.25-8.06 кОм±0.5%
R2 - C2-29B-0.25-4.02 кОм±0.5%
С3-С6 – блокировочные конденсаторы (для предотвращения обратной связи по питанию) серии К10-17-25В-0.1мкФ±0.5%
Для исключения интегрирования собственной ошибки ОУ необходимо в начальный момент времени закоротить ключ, роль которого выполняет микросхема КР590КН2 в состав которой входит четыре аналоговых ключа, Uпит=±15 В.
Реализация регулятора скорости:

рис.6
Выбираем R1 – 10 кОм, тогда для реализации Крс=10:
![]()
Для создания обратной связи по скорости первой массы применим тахогенератор ТП50-100-1 с параметрами Uмах=150 В Þ в нашем случае примем, что на максимальной скорости тахогенератор вырабатывает 75 В. Jp=360*10-7 кгм2 , Мтр=270*10-4 Нм. Видно, что момент инерции ротора тахогенератора и дополнительный момент сопротивления настолько малы по сравнению с основными параметрами системы, что ими можно пренебречь.
![]()
Для согласования выходного напряжения тахогенератора с системой управления, применим делитель, представленный на рис.7

рис.7
Примем R5=10 кОм Þ
![]()
![]()
Итак:
R1, R5 – C2-29B-0.25-10кОм±0.5%
R2 – C2-29B-0.25-13кОм±0.5%
R4 – C2-29B-0.5-100кОм±0.5%
R6 – два параллельно соединенных C2-29B-0.5-130кОм±0.5%
С1, С2 – блокировочные конденсаторы (см. выше)
DA1 – КР140УД25А.
Реализация сумматора (с коэффициентом усиления Кку=30).

рис.8
Выбираем R1=10 кОм Þ
![]()
R1 – C2-29B-0.25-10кОм±0.5%
R2 – C2-29B-0.5-100кОм±0.5%
R6 – C2-29B-1-300кОм±0.5%
DA1 – КР140УД25А.
Реализация сумматора с ограничением сигнала.

рис.9
Выбираем: R1, R2, R3 – C2-29B-0.25-10кОм±0.5%
Для ограничения используется стабилитрон 2С210A с параметрами:
Uст=10 В, Iст=5 мА, DUст=9-10.5 В.
DA1 – КР140УД25А.
Реализация регулятора тока.

рис.10
Для получения сигнала обратной связи по току применим датчик тока на основе элемента Холла: LTS25-NPс параметрами: Iном=25 А, Iмах=75 А, Uпит=5 В, точность-0.7% от Iном.
Реализовывать И-регулятор тока будем с помощью двух микросхем КР140УД25А
Один операционный усилитель служит для суммирования сигнала задания на ток и сигнала обратной связи, второй будем использовать как интегратор сигнала, поступающего с сумматора, предусмотрев ограничение с помощью стабилитрона 2С210А. В качестве закорачивания интегратора применим второй ключ микросхемы КР590КН2.
Для смещения сигнала от датчика тока подадим на первый ОУ Uсм =2.5 В, используя делитель R5-R6 (по 10 кОм)
Выбираем R1=R3=10 кОм, тогда:
![]()
Выбираем конденсатор С1 - К71-7-0.5мкФ±0.5% Þ
Т.к. Тpt=0.073, то:
![]()
Получили:
R1, R3 – C2-29B-0.25-10кОм±0.5%
R2 – C2-29B-0.25-2кОм±0.5%
R4 –два параллельно соединенных C2-29B-1-291кОм±0.5%
DA1, DA2 – КР140УД25А.
С1 - К71-7-0.5мкФ±0.5%
Теперь объединим отдельно рассмотренные блоки в общую схему. Суммарная принципиальная электрическая схема представлена на листе КП.000.019.002 ЭЗ
6. Разработка конструкции блока управления
Все устройства блока управления собраны на выбранных ранее операционных усилителях, резисторах, конденсаторов, стабилитронов и других элементах. Монтаж произведем на стеклотекстолитовую плату, монтаж элементов односторонний, разводка дорожек двухсторонняя. Расположение элементов соответствует наиболее рациональной разводке. Для определения размеров печатной платы необходимо сначала определить суммарную площадь, которую занимают элементы:
Резисторы
В схеме присутствуют три вида резисторов с разной мощностью.
| Тип резистора | Номинальная мощность | Размеры, мм | |
| D | L | ||
| С2–29В | 0.25 | 4.5 | 11 |
| 0.5 | 7.5 | 14 | |
| 1 | 9.8 | 20 | |

Конденсаторы
В схеме присутствуют два вида конденсаторов.
| Тип конденсатора | Размеры, мм | ||
| L | Н | В | |
| К10–17 | 6 | 5.5 | 4 |
| К71–7 | 26 | 32 | 16 |

Примечание: На цепи питания, отходящие от разъема, необходимо поставить полярные блокировочные конденсаторы, емкость которых зависит от потребляемого тока (т.е. на цепи +15В и –15 В – К50-31-25В-100мкФ, на цепь +5 В – конденсатор К50-31-25В-10мкФ)
Полярные конденсаторы:
| Тип конденсатора | Номинальная емкость | Размеры, мм | |
| D | L | ||
| К50-31 | 100 | 8.5 | 27 |
| 10 | 6 | 22 | |
Микросхемы
В схеме присутствуют два вида микросхем: операционные усилители КР140УД25А, а так же логический ключ КР590КН2.
| Тип | Размеры, мм | ||
| n | L | B | |
| КР140УД25А | 7 | 12 | 7.5 |
| КР590КН2 | 16 | 20 | 7.5 |

Суммарная площадь, занимаемая элементами, составляет приблизительно:
 ,где
,где
Кразв – коэффициент, учитывающий «разводку» платы, принимаем равным 0.4
После приблизительного размещения элементов, выяснили, что длина печатной платы составляет 180 мм, из стандартного ряда выбираем ширину платы – 110 мм
![]()
Подача напряжений питания (+15 В, -15 В, +5 В), сигналов задания и снятие сигналов обратной связи осуществляется через разъем СНО51–30/59*9Р–2.
При дальнейшей разработке блока управления, учесть, что плата управления является отдельным функциональным блоком общей системы управления.
Плата управления вставляется в общий блок по направляющим (с точным совмещением разъемов).
Конденсаторы К71–7-0.5мкФ после пайки «приклеиваются» к плате.
Все элементы припаиваются припоем ПОС61 ГОСТ21930-76.
После пайки плата покрывается лаком.
Заключение
В данном курсовом проекте была разработана система управления скоростью электропривода с асинхронным двигателем и импульсно-ключевым регулятором в цепи ротора добавочного сопротивления. В качестве структуры была выбрана адаптивная система с эталонной моделью с П - регулятором в контуре скорости. Внутренний контур тока для лучшей отработки возмущающего воздействия настроен на технический оптимум. Приведены результаты моделирования, позволяющие сделать вывод о соответствии спроектированной системы техническому заданию.
Также были произведены расчет и выбор всех элементов, реализующих данную систему. По полученным результатам мы составили принципиальную электрическую схему, и предложили один из вариантов расположения элементов на печатной плате.
Список используемой литературы
1. Копылов И.П. «Справочник по электрическим машинам» М. 1988.
2. Елисеев В.А. «Справочник по автоматизированному электроприводу» М.1983.
3. Шурков В.Н. «Основы автоматизации производства и промышленные роботы» М. 1989.
4. Усатенко С.Т. «Выполнение электрических схем по ЕСКД» М.1983.