| Скачать .docx |
Реферат: Сборка и контроль направляющих
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра электронной техники и технологии
РЕФЕРАТ
на тему:
«Сборка и контроль направляющих »
МИНСК, 2008
1. Виды направляющих и общие технические требование к их сборке
Некоторые детали и узлы оптико-механических приборов в процессе работы должны выполнять прямолинейные или вращательные движения в заданном направлении, например узел подвижной (визирной) сетки окуляр-микрометра, стол инструментального микроскопа, которые совершают возвратно-поступательные движения в процессе измерений.
Детали, которые обеспечивают движение по сопрягаемым поверхностям других деталей в заданном направлении, называются направляющими. Различают следующие виды направляющих: а) по виду движения - направляющие прямолинейного движения и направляющие вращательного движения; б) по виду трения - направляющие с трением скольжения и направляющие с трением качения.
Например, беговые дорожки наружного и внутреннего колец шарикоподшипника являются направляющими вращательного движения с трением каления. Внутренняя цилиндрическая поверхность зрительной трубы 1 (рис. 1, а) служит направляющий прямолинейного движения тубуса 2 при возвратно-поступательном движении окуляра.
Направляющие прямолинейного движения с трением скольжения (рис. 1, а, б, в) часто применяют для перемещения сеток окуляров, тубусов микроскопов при грубой и тонкой наводке, различных столиков оптических приборов и т. д.
Направляющие прямолинейного движения с трением качения (рис. 1, г) применяют для перемещения столиков микроскопов и других узлов, требующих легкого перемещения.
На рис. 1, а, б, в показаны замкнутые направляющие, которые обеспечивают движение перемещаемых деталей в направлении, показанном стрелками, и могут работать при вибрациях, сохраняя требуемую точность. Открытая направляющая, показанная на рис. 2р, г, может работать только при наличии значительной силы тяжести перемещаемой детали. Такие направляющие работают в стационарных лабораторных приборах, без вибраций.
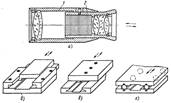
Рис.1. Виды направляющих прямолинейного движения.
Направляющие вращательного движения с трением скольжения по цилиндрическим поверхностям (рис. 2, а) применяют для узлов, вращающихся с небольшими скоростями. Эти направляющие чувствительны к температуре, изменение которой вызывает линейное расширение, а вместе с ним торможение и заклинивание сопрягаемых деталей. Это явление заставляет систематически подавать смазку в зазоры трущихся поверхностей.
Направляющие вращательного движения с трением скольжения по коническим поверхностям (рис. 2, б) применяют в точных измерительных приборах, например в теодолитах, окулярных штриховых головках и т. д.
Направляющие вращательного движения с трением скольжения по сферической поверхности (рис. 2, в) применяют для закрепления в них шаровых пят приборов, например, закрепления артиллерийской буссоли в направляющей зажимной чашки.
Направляющие вращательного движения с трением качения (рис. 2, г) применяют, для узлов, требующих вращения с повышенной скоростью. Эти направляющие имеют малую чувствительность к изменениям температуры и требуют незначительного количества смазки.
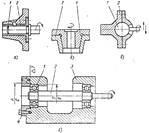
Рис.2. Вилы направляющих вращательного движения.
Все виды направляющих должны отвечать следующим основным техническим требованиям: иметь необходимые точность и плавность движения, малое трение, малый износ.
Эти требования удовлетворяются за счет выбора материалов сопрягаемых деталей с одинаковым или близким коэффициентом линейного расширения, качественной обработки и подготовки поверхностей направляющих, а также за счет применения качественных смазок.
2. Сборка узлов с направляющими прямолинейного движения с трением скольжения и качения
Для качественной сборки узлов с направляющими прямолинейного движения с - рением скольжения и качения важно решить основные конструктивные задачи: выбор нужного сочетания материалов, создание наиболее технологичной конструкции.
Хорошие результаты обеспечивают следующие сочетания материалов: сталь незакаленная или закаленная - бронза, латунь ЛС 59-1 - бронза, сталь закаленная - чугун, сталь незакаленная или закаленная - пластмассы (текстолит, полиэтилен, карболит, капрон).
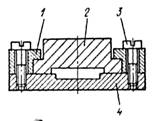
Рис.3. Регулируемая направляющая прямолинейного движения.
Для обеспечения наибольшей технологичности конструкции узла, с направляющими и уменьшения числа пригоночных работ при его сборке применяют направляющие с регулируемым зазором. Зазор устраняется путем поджатия подвижной детали (каретки) 2 при помощи винтов 3 и полозков 1 к поверхности направляющей 4 (рис. 3).
Для уменьшения объема пригоночных работ при сборке узлов с направляющими необходимо хорошо подготовить трущиеся поверхности сопрягаемых деталей шлифованием, тонким точением пли фрезерованием с чистотой обработки поверхности по 7-9-му классам. Это сокращает трудоемкость пригоночных работ.
Плоские направляющие можно обработать с точностью до 0,01-0,02 мм на плоскошлифовальном станке па длине до 1000 мм, а цилиндрические - до 0,003-0,005 мм па круглошлифовальном станке.
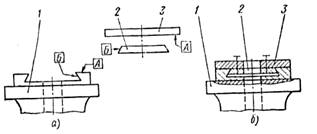
Рис.4. Сборка узла направляющей типа «ласточкин хвост».
Типовой технологический процесс сборки узла с направляющей типа «ласточкин хвост» ведется в следующей последовательности.
1. Собираемые детали 1, 2, 3 (рис. 4, а) зачищают после механической обработки.
2. Устанавливают деталь 2 в деталь 1, при этом деталь 2 прижимают с помощью планки 3 к трущимся плоскостям Б детали 1 с обеих сторон и щупом проверяют зазор между деталями 2 и 3 или 1 и 3 (рис. 4, б).
3. При обнаружении зазора подгоняют поверхности А путем шаберения и последующей притирки плоскостей А и Б в деталях 1, 2, 3.
4. После притирки детали 2 и 3, не разбирая, выдвигают из детали 1, все промывают, смазывают, снова вставляют в деталь 1 (рис. 4, б) и проверяют плавность перемещения по направляющей.
Сборку узлов с направляющими прямолинейного движения других видов с трением скольжения и качения ведут приблизительно в такой же последовательности с применением пригоночных работ, которые могут быть сокращены путем рационального выбора допусков и назначения класса чистоты обработки сопрягаемых поверхностей.
Сборка узлов с направляющими вращательного движения с трением скольжения и качения
Технология сборки узлов с направляющими вращательного движения с трением скольжения (рис. 2, а, б, в) предусматривает качественную механическую обработку трущихся поверхностей и включает сборку направляющих 2 с сопрягаемыми деталями 1 путем их совместной притирки и выдерживания нужных зазоров с последующей промывкой и смазкой
Сборку узла с направляющем!, вращательного движения с трением качения (рис. 2, г), осуществляют следующим образом.
1. Комплектуют шарикоподшипники 1 с валом 2 для посадки их на вал с предусмотренным натягом.
Посадку шарикоподшипников на вал выполняют по системе отверстия (отверстие постоянно) за счет поля допуска вала. Допуск па диаметр в 1ла задают по второму классу точности для посадок С, П, Н.
2. Напрессовывают шарикоподшипники на посадочные места (цапфы) вала 2 и запрессовывают наружные кольца подшипников в посадочные гнезда корпуса 3. При этом используют специальные оправки для создания давления на торцы двух колец шарикоподшипника одновременно.
3. Закрепляют левый шарикоподшипник крышкой 4, привернув се винтами.
4. Регулируют узел, обеспечивая легкость хода и выдерживая нужный осевой зазор, компенсирующий линейное расширение металла, за счет подрезки опорного торца крышки 4.
5. Узел чистят и смазывают.
Контроль направляющих
После сборки узлов с направляющими проверяют их качество.
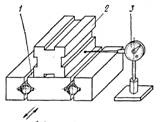
Рис.5. Схема контроля прямолинейности направляющих прямолинейного движения.
В направляющих вращательного движения определяют радиальное и осевое биения. Для этого корпус индикатора закрепляют на неподвижной части узла или прибора. Касаясь чувствительным элементом индикатора проверяемой поверхности вращающейся детали, по шкале индикатора находят величину биений. Для повышения точности измерения применяют более чувствительные измерительные приборы.
Направляющие прямолинейного движения проверяют по прямолинейности хода в горизонтальной и вертикальной плоскостях. В зависимости от конструкции и размеров узла с направляющей проверку осуществляют несколькими способами. Наибольшее применение нашли два способа контроля: .при помощи лекальной линейки и индикатора; при помощи автоколлимационной зрительной трубы и зеркала. Контроль направляющих при помощи лекальной линейки и индикатора осуществляют следующим образом (рис. gf).
1. Устанавливают лекальную линейку 2 на плоскость перемещающейся детали 1 параллельно ее ходу. При этом лекальную линейку закрепляют мастикой. Чувствительный элемент 3 индикатора приводят в соприкосновение с линейкой.
2. Перемещая деталь 1, устанавливают лекальную линейку параллельно направляющим по одинаковому от счету индикатора в двух крайних точках грани лекальной линейки.
3. Перемещая деталь 1, проверяют прямолинейность ее движения на всем пути перемещения. При этом показание на шкале индикатора должно быть неизменным, в противном случае имеет место непрямолинейность.
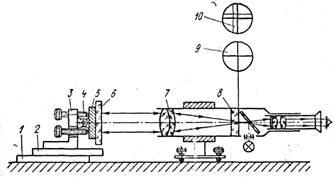
Рис.6. Схема контроля направляющей при помощи автоколлимационной зрительной трубы.
Контроль прямолинейности направляющих автоколлимационным методом осуществляют в следующей последовательности (рис. 6).
1. Устанавливают и закрепляет плоскопараллельное зеркало 6 на угольнике 3, имеющем установочные винты 4 и оправу зеркала 5.
2. Устанавливают угольник 3 на перемещающуюся деталь 2 направляющей 1.
3. Перпендикулярно отражающей плоскости зеркала устанавливают зрительную трубу 7, в фокальной плоскости объектива которой находится сетка 8 с перекрестием и делениями.
4.Наблюдая в окуляр автоколлимационной зрительной трубы, совмещают отраженное от зеркала изображение сетки 8 с самой сеткой, пользуясь установочными винтами 4.
При этом в поле зрения 9 зрительной трубы будут видны совмещенные штрихи перекрестия сетки и автоколлимационного изображения.
5. Перемещая деталь 2 с закрепленным на ней зеркалом, проверяют прямолинейность перемещения этой детали в направляющей 1. При этом автоколлимационное изображение 10 не должно смещаться с перекрестия сетки дальше установленного допуска на прямолинейность.
В тех случаях, когда величина непрямолинейности выходит за пределы допускаемой, пригоняют трущиеся поверхности сопрягаемых деталей 1 и 2 путем шабрения и притирки.
Сборка узлов с винтовыми механизмами движения
Винтовые механизмы движения, представляющие собой взаимно перемещающиеся по резьбе винты и гайки, служат для преобразования вращательного движения в поступательное. Примерами винтовых механизмов движения являются винтовые пары подъемных домкратов, столов, которые служат для установки изделий при их сборке, контроле и юстировке на нужную высоту; винтовые пары микрометров, микроузла микроскопов, винтовых окулярных микрометров.
В оптико-механических приборах используют винтовые пары с метрической и трапецеидальной стандартными резьбами. Метрическую резьбу применяют для пар, несущих малые нагрузки, а также, если требуется малый шаг резьбы. Трапецеидальный профиль резьбы выбирают для винтовых пар, несущих большие нагрузки, с большим шагом перемещения. Кроме того, трапецеидальный профиль резьбы обеспечивает большую точность перемещения и создает меньшее трение в резьбе за счет меньшего угла профиля резьбы (30°).
К винтовым механизмам движения предъявляют следующие основные требования: 1) высокая точность осевого перемещения; 2) точное направление перемещения винта или гайки; 3) долговечность работы винтовой пары.
Первое и второе требования обеспечиваются применением метрических резьб при малом шаге (до 1 мм) и трапецеидальных - при шаге больше 1 мм, качественной нарезкой профиля и шага резьбы на всей длине перемещения, а также последующей качественной сборкой винтовой пары с применением притирки.
Третье требование обеспечивается путем применения материалов в благоприятном сочетании: винт из закаленной или незакаленной стали, гайки - из бронзы, латуни или полиэтилена, а также за счет использования разрезных гаек, которые позволяют регулировать величину зазора и мертвого хода резьбы, а также компенсировать износ элементов резьбы при эксплуатации изделия путем стягивания гайки кольцом с конической резьбой. Кроме того, долговечность обеспечивается своевременной смазкой трущихся поверхностей винтовой пары.
Технологический процесс сборки винтовых механизмов движения рассмотрим на примере сборки микрометрического винтового механизма инструментального микроскопа малой модели.
Сборку ведут в следующей последовательности (рис. 7).
1. Запрессовывают шарик / в отверстие микровинта 2.
2. Напрессовывают втулку 4 со шкалой на наружную цилиндрическую поверхность микрогайки 3.
3. Навинчивают микрогайку 3 на микровинт 2 и выполняют их совместную притирку пастой ГОИ, выдерживая нужный зазор в резьбе гайкой 8 путем навинчивания ее на коническую разрезную часть микрогайки 3. При этом
резьбовая часть микрогайки способна сжиматься, так как она имеет несколько прорезей.
4. Промывают винтовую пару в бензине и проводят повторную сборку на смазке, добиваясь плавности хода без перевалов, люфтов и мертвого хода.
5. Барабан 6 укрепляют на гильзе 5 при помощи резьбового кольца 7.
6. Надевают собранный барабан 6 с гильзой-5 на микровинт 2.
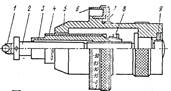
Рис.7. Микрометрический винтовой механизм.
7. После этого закрепляют гильзу 5 на микровинте 2 резьбовым кольцом 9, совместив нулевой штрих барабана 6 с продольным штрихом шкалы втулки 4. При этом отсчетный торец гильзы 5 должен совпадать с одним из штрихов шкалы втулки 4 (достигается разворотом по резьбе микровинта 2).
8. Проверяют точность отсчета винтового механизма. Для этого устанавливают собранный микрометрический механизм на микроскопе и по образцовой шкале определяют величину погрешности следующим образом.
Во-первых, устанавливают образцовую шкалу 1 (рис. 8) с ценой деления 0,1 мм на стекле 4 стола контрольного микроскопа параллельно ходу салазок стола. При этом горизонтальный штрих 3 сетки окуляра микроскопа должен быть параллелен продольной риске образцовой шкалы, а перекрестие сетки микроскопа не должно смещаться с продольной риски образцовой шкалы 2 на всем пути перемещения стола с образцовой шкалой.
Во-вторых, перемещая стол микроскопа вращением барабана 5 проверяемого винтового механизма, последовательно совмещают деления образцовой шкалы 1 с вертикальным штрихом окуляра микроскопа для каждого деления барабана 5, следующего через 0,1 мм в пределах одного оборота барабана, и далее через 1 мм. Показания шкалы отсчетного барабана 5 должны совпадать с величиной перемещения образцовой шкалы. Например, после наведения на нулевой штрих образцовой шкалы стол; переместили до 25-миллиметрового штриха образцовой шкалы. На шкале отсчетного барабана также должна быть цифра 25. В противном случае разность этих двух отсчетов будет составлять величину погрешности винтовой пары. Допускаемая погрешность - не более 0,003 мм, т. е. одна треть интервала деления барабана 5.
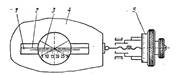
Рис.8. Схема проверки микрометрического винтового механизма микроскопа.
Литература
1. Справочник технолога-оптика под редакцией М.А. Окатова, Политехника Санкт-Петербург, 2004. - 679 с.
2. Запрягаева Л.А., Свешникова И.С. Расчет и оптических систем. М. Логос, 2000. - 581 с.
3. Апенко М.И., Запрягаева Л.А., Свешникова И.С. Задачник по прикладной оптике, Высшая школа, 2003. - 591 с.
4. Прикладная оптика под редакцией Дубовика А.С Машиностроение, 1992. - 470 с.