| Скачать .docx |
Реферат: Система "Тракт" и система телеуправления малодеятельными станциями ТУМС
Система «Тракт» и Система телеуправления малодеятельными станциями ТУМС
1. Система телеуправления малодеятельными станциями ТУМС
Система телеуправления ТУМС предназначена для управления с опорных станций стрелками и сигналами на малодеятельных станциях, обгонных пунктах и постах примыканий. Под малодеятельными понимаются станции с малым объемом местной работы. Такие станции могут находиться и на участках с интенсивным движением поездов.
При оборудовании станции устройствами ТУМС не вносятся какие-либо изменения в схемы взаимозамыкания стрелок и сигналов и размыкания маршрутов, т.е. безопасность ЭЦ не снижается. Напротив, ТУМС позволяет повысить безопасность движения поездов благодаря программной реализации дополнительных зависимостей, контроля состояния устройств ЭЦ и выявления возникших неисправностей.
При сопряжении ТУМС с ЭЦ исключена возможность гальванической или электромагнитной связи электронной аппаратуры ТУМС с цепями управления и контроля ЭЦ. Для съема информации с ЭЦ используются чистые «тройники» контактов реле ЭЦ. Схема съема информации получает питание от изолированного от ЭЦ источника постоянного тока. Команды из электронной аппаратуры ТУМС передаются в ЭЦ через релейный дешифратор команд управления, построенный на реле первого класса надежности. Цепи управления ЭЦ не заводятся в блоки электронной аппаратуры ТУМС, а их монтаж выполнен по правилам и нормам, принятым для стативов ЭЦ, что исключает возможность заземления и подпитки цепей управления.
Благодаря таким решениям подключение аппаратуры ТУМС не приводит к снижению принятых для ЭЦ норм по сопротивлению и напряжению изоляции между отдельными цепями и по отношению к земле.
Состояние реле дешифратора непрерывно контролируется двумя компьютерами: ПЭВМ на распорядительной станции и микроЭВМ на исполнительной, и в случае отказа каждый компьютер независимо от другого может заблокировать выдачу команд управления на ЭЦ.
Ответственные команды, т.е. команды вспомогательной смены направления, искусственной разделки маршрута, закрытия-открытия переезда, передаются в два этапа при условии нажатия кнопки ответственных команд. Сначала посылается предварительная команда, и только после получения на передающей станции сигнала о правильности ее исполнения оператор может послать окончательную команду, результат которой тоже контролируется.
Интервал времени между передаваемыми полукомандами не должен превышать 20 с. По истечении заданного промежутка времени все данные, относящиеся к ответственной команде, сбрасываются.
На устройства ЭЦ ответственные команды выводятся в два такта с использованием дополнительных реле, установленных между дешифратором ТУМС и схемами ответственных команд ЭЦ. Такое решение совместно с ограничением на время выполнения команд исключает ложную выдачу ответственных команд.
Защита команд от искажений и трансформации в каналах связи обеспечивается благодаря применению избыточного кодирования передаче контрольных сумм с квитированием.
Для достижения высокой эксплуатационной надежности электронная аппаратура ТУМС, источники питания и каналы связи резервируются. При отказе работающего устройства происходит автоматическое переключение на резервное.
Структурная схема системы и основные технические данные. Первый вариант системы ТУМС разработан с расчетом на то, что для управления соседней станцией будет использоваться традиционный пульт ЭЦ с кнопками и индикаторными лампами. В связи с этим на исполнительной и распорядительной станциях применены микроконтроллеры с устройствами ввода-вывода дискретной информации: на исполнительной станции — для контроля состояния объектов ЭЦ и управления стрелками и сигналами, на распорядительной — для ввода команд с кнопок и управления индикацией пульта, а также для съема информации с собственных устройств ЭЦ станции с целью передачи ее поездному диспетчеру и дежурному инженеру дистанции СЦБ. Однако этот вариант оказался неконкурентоспособным в связи с повсеместным применением в системах управления ПЭВМ. После некоторой доработки он может быть рекомендован для замены устаревших систем кодовой централизации СКЦ-67 в случаях, когда целесообразно сохранение существующих аппаратов управления и контроля.
| Рис. 8.10. Структурная схема системы ТУМС |
| 314 |
Структурная схема системы ТУМС, построенной с применением ПЭВМ в качестве аппарата управления, приведена на рис. 10.
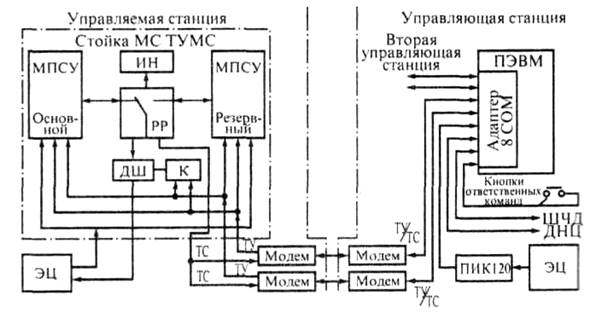 |
Рис. 10 Структурная схема системы ТУМС
В системе используются серийные устройства:
IBM, совместимая с ПЭВМ, или промышленный компьютер с монитором, укомплектованные адаптером 8 СОМ для увеличения числа портов типа К5232;
аппаратура микропроцессорной системы управления (МПСУ) широкого назначения, выпускаемая Специальным конструкторским бюро по вычислительной технике (СКБ ВТ, г. Псков);
стандартные модемы, работающие в дуплексном режиме по двухпроводным физическим цепям в кабелях связи или по каналам тональной частоты со скоростью передачи не менее 200 Бод;
реле СЦБ типов НМШ, Д и РЭЛ.
Система допускает управление станциями с числом стрелок до 24 (спаренные стрелки считаются за одну единицу).
Число контролируемых объектов на управляемой станции — до 296 «тройников» реле.
Дальность управления по физическим цепям до 20км, при использовании каналов ТЧ практически не ограничена.
Время передачи информации на рабочее место ДСП об изменении состояния объектов на управляемой станции определяется в основном возможностями применяемой аппаратуры связи и не превышает 2 с при скорости передачи 200 Бод.
Система обеспечивает как маршрутное, так и раздельное управление стрелками и сигналами независимо от типа централизации на управляемой станции.
В маршрутном режиме команды на установку маршрута передаются на управляемую станцию только после проверки в устройствах распорядительной станции возможности их исполнения в соответствии с принятыми в электрической централизации зависимостями.
Система контролирует состояние устройств ЭЦ на управляемой станции и собственных устройств ТУМС. Информация об отказах устройств: перегорании светофорных ламп, потере контроля стрелок, перекрытии светофоров, ложной свободности секций при прохождении поезда, отказах каналов связи, комплектов МПСУ — записывается на жесткий диск ПЭВМ и отображается на ее экране в оперативном режиме изменением цвета отказавшего объекта или по вызову в виде таблицы с указанием устройства, датыи времени возникновения неисправности. Одновременно с выводом на экран информации об отказах включается звуковой сигнал или речевой информатор.
Система может также контролировать состояние устройств ЭЦ на управляющей станции, регистрировать отказы и сбои в работе устройств и передавать необходимую информацию дежурному инженеру дистанции сигнализации и связи.
Предусмотрена также возможность передачи поездному диспетчеру информации о занятости путей, показаниях светофоров, установленных маршрутах и др.
Для съема информации с ЭЦ управляющей станции может использоваться промышленный индустриальный контроллер ПИК-120, выпускаемый ПО «Красный Октябрь», г. Каменск-Уральский Свердловской области.
Аппаратура управляемой станции. В состав аппаратуры входят: два комплекта МПСУ (основной и резервный); релейный дешифратор команд управления ДШ; комплект реле для автоматического переключения на резерв РР; устройство блокировки команд управления К; панель индикации ИН: два изолированных от ЭЦ источника питания постоянного тока напряжением 24 В, используемые для питания перечисленных выше реле и цепей ввода информации с ЭЦ, а также изолирующий трансформатор и фильтр для питающего напряжения переменного тока 220 В (на схеме не показаны).
В состав каждого комплекта МПСУ стойки входят следующие устройства: каркас КМ-8, контроллер М231.2, устройство асинхронного последовательного обмена М236, два устройства приема дискретных сигналов М201, три устройства дискретного вывода М203.1, блок питания.
Каркас КМ-8 рассчитан на размещение восьми модулей. Размеры каркаса 175x215x360 мм, модулей 145x20x262 мм.
Контроллер М231.2 представляет собой одноплатную микро-ЭВМ с 16-разрядным процессором. Запоминающее устройство контроллера имеет изменяемую конфигурацию и состоит из энергонезависимого оперативного запоминающего устройства (ЭОЗУ), ОЗУ и репрограммируемого ЗУ.
Контроллер имеет в своем составе два канала последовательного обмена типа ИРПС «20 мА токовая петля». Один из них используется программой пультового режима для выполнения оператором отладочных операций. К другому каналу в случае необходимости может быть подключено внешнее устройство.
Устройство синхронного последовательного обмена М236 предназначено для подключения четырех внешних устройств с последовательным интерфейсом ИРПС «20 мА токовая петля» либо двух внешних устройств по интерфейсу К8232 и двух устройств с последовательным интерфейсом ИРПС.
Устройство приема дискретных сигналов М201 имеет 32 изолированных друг от друга входных канала для ввода сигналов постоянного тока напряжением 24 В. Входной ток не более 10 мА. Имеется гальваническая развязка по входу; ее сопротивление не менее 1 МОм, напряжение не менее 500 В.
Устройство дискретного вывода имеет 32 выходных канала типа «открытый коллектор». Выходное напряжение не менее 24 В, выходной ток до 500 мА. Имеется гальваническая развязка между внутренними и внешними цепями, а также между каналами. Параметры развязки такие же, как в модуле М201.
Модули М203.1 и оба модуля М201 обеспечивают групповой ввод информации с контактов реле ЭЦ и реле, находящихся на стойке. Адрес группы выводится на выходы 18—32 модуля М203.1, сигналы одновременно с фронтовых и тыловых контактов реле поступают на входы 17—32 модуля М201 (1) и 1—32 модуля М201(2).
Адресные провода в матрице контактов реле ЭЦ закольцованы: после прохождения по релейной они возвращаются на стойку ТУМС и подключаются к входам 1—15 модуля М201(1) для программного контроля исправности выходов модуля М203.1(1) и правильности адресации.
Модули М203.1(2) и М203.1(3) предназначены для управления. К их выходам подключаются реле дешифратора: восемь групповых и 16 объектных реле, смонтированных на стойке, и восемь внешних объектных реле. Дополнительно на «нулевые» клеммы стойки выведены 16 выходов (2—17) модуля М203(1) типа «открытый коллектор».
Модуль М231.2, являясь центральным устройством системы, обеспечивает управление вводом-выводом информации, ее обработку, формирование команд на исполнительные устройства ЭЦ и др.
Дешифратор команд управления ДШ является устройством сопряжения электронной аппаратуры ТУМС с электрической централизацией. Дешифратор двухступенчатый и построен на реле первого класса надежности.
Первую ступень дешифратора образуют восемь групповых реле, которыми выбирается вид объекта управления: стрелки, поездные сигналы, маневровые сигналы и схемы смены направления движения, вспомогательной смены направления движения, искусственной разделки и отмены маршрута.
В качестве групповых реле используются сдвоенные реле типа Д, т.е. групповое реле представляет собой два реле, находящиеся в одном корпусе. Каждое реле подключено к отдельному выходному транзистору модуля вывода М203.1.
Вторую ступень дешифратора образуют объектные реле 01-016, которыми выбирается объект в группе. В качестве объектных реле применены реле типа РЭЛ. Каждое из этих реле подключено к двум последовательно соединенным выходным транзисторам модулей М203.1, т.е. для возбуждения группового реле, как и объектного, необходимо совпадение сигналов на двух выходах МПСУ. Одно и то же объектное реле может использоваться для управления несколькими объектами (до семи), находящимися в разных группах.
Реле дешифратора работают по программе, зашитой в памяти контроллера. На каждые тип объекта и операцию по управлению устройствами ЭЦ имеется отдельный программный модуль: модуль управления стрелками, модуль управления сигналами, модуль вспомогательной смены направления движения и др.
Для выполнения ответственных операций, как отмечалось выше, подаются две-три команды.
Сформированная программно команда передается через релейный дешифратор в устройства электрической централизации.
Дешифратор имеет 112 выходов, которые образованы сочетанием контактов каждого из 16 объектных реле с каждым из семи групповых (за исключением группового реле отмены маршрута, повторитель которого устанавливается на стативе ЭЦ и используется для выполнения команд на отмену маршрута и в схемах искусственной разделки).
Для уменьшения объема монтажных работ на управляемой станции все соединения между контактами реле дешифратора выполнены внутри стойки. На клеммную панель выведены только входы и выходы дешифратора, к которым должны подключаться цепи от схем ЭЦ.
Дешифратор стойки рассчитан на подключение 16 стрелок.
Увеличение емкости системы до 24 стрелок достигается установкой на стативах ЭЦ и подключением к стойке дополнительно восьми объектных реле 017-024, контакты которых соединяются по той же схеме, что и контакты реле 01-016, находящихся на стойке. Кроме того, в случае необходимости, могут быть использованы 16 выходов типа «открытый коллектор».
К реле автоматического переключения комплектов МПСУ из рабочего режима в резервный и наоборот относятся пять реле НМШ: два реле («аварийные») контролируют исправность комплектов МПСУ, одно — исправность источника питания напряжением 24 В, остальные два коммутируют выходные цепи комплектов.
Контроль основан на том, что реле находится под током лишь в том случае, если процессор периодически переключает транзистор на выходе модуля вывода. При остановке, зависании процессора или обнаружении отказа внутренними средствами диагностирования импульсная работа транзистора прекращается, аварийное реле обесточивается и происходит автоматическое переключение на резерв.
Устройство блокировки команд управления служит для исключения выдачи ложных команд при отказах и сбоях в работе МПСУ и состоит из приемника сигналов телеуправления, работающего независимо от МПСУ. и контрольного реле. При нормальном функционировании системы реле находится под током и подает питание на схему дешифратора.
Если ПЭВМ управляющей станции зафиксировала срабатывание реле дешифратора при отсутствии команд телеуправления, передача сигналов в канал ТУ прекращается, реле обесточивается и снимает питание с дешифратора.
На панели индикации установлены светодиоды для контроля работы реле дешифратора при выдаче команд на устройства ЭЦ, вывода адреса и ввода информации с устройств ЭЦ, исправности комплектов МПСУ и их состояния (в работе или резерве).
Организация каналов ТУ-ТС . Между станциями предусматриваются два равнозначных канала связи. На управляемой станции каналы подключены таким образом, что каждый из двух комплектов аппаратуры МПСУ может принимать информацию из обоих каналов. Передавать может только один комплект, тот, который в данный момент является рабочим. Информация передается циклически одновременно в оба канала.
На управляющей станции оба канала связи подключены к ПЭВМ через расширитель СОМ-портов. Прием сообщений на управляющей станции ведется ПЭВМ из обоих каналов. Команды телеуправления передаются лишь по одному каналу, выбранному как более качественный.
Сигналы ТУ-ТС, передаваемые между станциями, содержат контрольную сумму для проверки принятого сигнала на достоверность. На каждый правильно принятый сигнал ТУ-ТС посылается ответ (квитанция). При отсутствии ответа передача повторяется до двух раз.
2. Система «Тракт»
Система «Тракт» состоит из взаимосвязанных подсистем: пункта управления (ПУ), контролируемых пунктов (КП) на станциях участка и коммуникационной подсистемы, имеющей распределенную структуру (рис. 11).
Состав подсистемы ПУ: автоматизированное рабочее место поездного диспетчера с подсистемой графика исполненного движения — ГИД (АРМ ДНЦ и АРМ ГИД); функциональная клавиатура ФК; автоматизированное рабочее место электромеханика ДЦ (АРМ ШН ДЦ); автоматизированное рабочее место энергодиспетчера (АРМ ЭНЦ); сервер сети и сетевое соединительное оборудование; комплекс технических средств (КТС) «Тракт-ЦП»; программно-технический шлюз системы; программное обеспечение общего и специального назначения.
Базой подсистемы КП служит комплекс технических средств (изделие) «Тракт-ЛП», имеющий пять составляющих: ведущий управляющий модуль «Мастер»; модуль вывода дискретной информации; модуль ввода дискретной информации; модуль вывода ответственных команд; модули сопряжения с объектами управления, контроля и аппаратурой связи (модули УСО); модуль цифровой обработки сигналов или модуль коммутатора кабельных линий; помехоустойчивая локальная сеть; система электропитания; общее и специальное программное обеспечение.
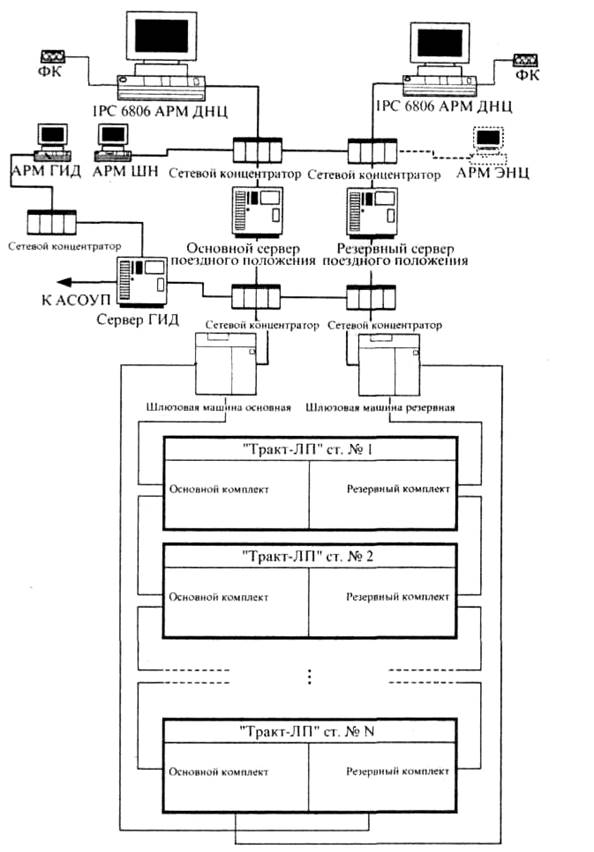 |
Рис. 11. Структурная схема системы «Тракт»
Характеристика системы. Количество КП на участке диспетчерского управления определяется только допустимой загрузкой поездного диспетчера.
При использовании существующих систем ДЦ время циклов сигналов ТУ-ТС и скорость передачи в каналах связи определяются характеристиками этих систем.
Технические данные системы приведены ниже. Возможное число объектов управления на одном КП, обеспечиваемое одной приборной стойкой при прямом подключении ………………………………………….672
То же число объектов ответственного управления………………….480
То же число контролируемых объектов……………………………1920
Максимальное время, с:
цикла ТС, не более……………………………………………..……….1,0
сигнала ТС, не более……………………………………………….…….0,5
Скорость передачи по каналам ТУ-ТС, МБод,
не более……………………………………………………………………..2
Поддерживаемые коммуникационной подсистемой протоколы обмена данными для каналов связи:
Аналоговых…………………………………………IPX, TCP/IP, QNXNet
цифровых............................... ……………….TCP/IP, QNX Net (FLEET)
Устройство и работа системы. Аппаратное и программное обеспечение системы строится по модульному принципу. Используется архитектура многомашинных микропроцессорных систем с несколькими уровнями информационного взаимодействия и обеспечения безопасности функци-онирования, с автоматическим резервированием и возможностью перераспределения функций, развитыми средствами диагностирования.
В подсистеме ПУ реализована резервированная сетевая архитектура построения с топологией типа «звезда».
АРМ ДНЦ является объектно-ориентированным программно-аппаратным комплексом, предназначенным для контроля поездного положения на участке диспетчерского управления и выдачи команд телеуправления на контролируемые пункты с использованием пользовательского интерфейса.
АРМ ШН — объектно-ориентированный комплекс, который служит для контроля поездного положения на участке диспетчерского управления и работоспособности каналообразующей аппаратуры ПУ, каналов ТС. В информационном обмене участвует резервированная локальная вычислительная сеть ПУ.
АРМ ГИД (подсистема АРМа ДНЦ) выполняет функции: автоматического ведения графика исполненного движения, автоматического слежения за подвижными единицами, подготовки плана-графика, получения справочной информации, расчета показателей работы.
Резервированный сервер локальной сети ПУ предназначен для хранения единой нормативной базы и исполняемых файлов всех рабочих станций ПУ, а также архивных файлов ТС системы, просмотр которых осуществляется с АРМа электромеханика. Корректная работа ПУ возможна и при отключении сервера.
Резервированный комплекс технических средств «Тракт-ЦП» принимает сигналы ТС, поступающие с КП, и выдает их в АРМ ДНЦ и АРМ ШН ДЦ, принимает команды ТУ из АРМа ДНЦ и передает их на КП, тестирует комплекс и выдает сигналы неисправностей при его функционировании. Этот комплекс осуществляет обмен информацией с КП участка диспетчерского управления по основному полукомплекту аппаратно-программных средств. В случае неисправности основного полукомплекта обмен информацией происходит с использованием резервного полукомплекта.
АРМ ДНЦ диспетчерского участка представляет собой комплект резервированных аппаратно-программных средств, включающий:
три индустриальных компьютера типа IPC-6806/PCA6168; две функциональные специализированные клавиатуры TiPro или аналогичные программируемые (одна в ненагруженном резерве). Конфигурация клавиатур максимально приближена к конфигурации стандартного пульта-манипулятора системы «НЕВА»; манипуляторы «мышь»; три цветных графических монитора, у одного из них размер экрана 17" и двух других 21" разрешением не ниже 1024x768 точек на дюйм; специализированное программное обеспечение.
АРМ ШН реализовано на индустриальном компьютере IPC-6806/РСА6168 с видеомонитором (размер экрана 17") и стандартнойклавиатурой.
АРМ ГИД так же построено на индустриальном компьютере IPC -6806/РСА6168, но с видеомонитором 21". Клавиатура стандартная.
Серверы сети (основной и резервный) на базе компьютеров IPC-6806/PCA6168 организованы под управлением операционной системы NetWere 4.11 (WindowsNT 4.0, Windows 2000).
Комплекс технических средств «Тракт-ЦП» включает в себя резервированные компьютеры промышленного исполнения IPC-6806/PCA6168 (шлюзовые машины), сетевое оборудование на базе сетевых концентраторов типа SuperstackIIPortSwitchHUB 12 (или 24) и источники бесперебойного питания интерактивного типа мощностью 1000 ВА. Оборудование КТС «Тракт-ЦП» размещается в базовой конструкции.
В подсистеме ПУ для повышения надежности функционирования предусматриваются:
программно-аппаратные средства контроля технического состояния АРМов и каналообразующей аппаратуры КТС;
нагруженное автоматическое резервирование и средства реконфигурации АРМов и КТС;
резервирование сетевого оборудования ПУ;
аппаратные средства бесперебойного электропитания;
специальные процедуры ввода и контроля управляющей информации.
Для обеспечения информационной безопасности предусмотрены:
меры защиты от несанкционированного доступа к оборудованию;
специальный реализуемый на программно-аппаратном уровне регламент выдачи команд телеуправления, исключающий их случайность.
Подсистема КП . Вычислительная система КП представляет собой резервированную управляющую локальную сеть (ЛС) с дублированной магистралью на основе помехоустойчивого протокола CAN 2.0B (стандарт ISO 11898). Основу элементной базы вычислительной системы составляют две платформы: процессор для встроенных применений Intel386EX и контроллер для встроенных применений C167CR. Ядро микропроцессорных модулей строится с использованием высоко интегрированных схем программируемой логики, FLASH-памяти и быстродействующей статической памяти. Элементная база имеет встроенные средства контроля, защитные средства системного уровня, обладает свойствами повышенной помехоустойчивости, минимальным электропотреблением.
Основной и резервный комплекты модулей имеют выход на обе магистрали сети. Сеть дублируется на верхних уровнях протокола. Это значительно расширяет зону контроля функционирования системы и позволяет при необходимости перераспределять вычислительные ресурсы (например, при частичном снижении скорости передачи в результате обрыва или замыкания одного из проводов магистрали).
В состав каждого комплекта входит ведущий вычислительный модуль «Мастер» и необходимое количество периферийных модулей ввода-вывода, определяемое числом точек контроля и управления конкретного объекта автоматизации. Предусмотрена возможность расширения ресурсов КП в рамках базовой дублированной локальной сети. Модули «Мастер» основного и резервного комплектов имеют дополнительный интерфейс для передачи полномочий в сети в случае различного рода отказов.
Станционная каналообразующая аппаратура подключена к модулю МКЛ соответствующего комплекта цифровым интерфейсом или, в случае использования протоколов релейных систем ЖАТ, модулей связи МЦОС (модуль цифровой обработки сигналов) с платформой ADSP2181.
Модули УСО решают задачи ограничения перенапряжений и подавления помех в сигнальных линиях от объектов управления-контроля.
Программное обеспечение системы . ПО построено на основе стандартных протоколов обмена и программных компонентов реального времени. На критических участках алгоритма функционирования используется n -версионное программирование.
Загрузка и инициализация программного обеспечения на ПУ осуществляются автоматически после включения электропитания аппаратных средств.
Работа программной среды пользователя на компьютерах основного и резервного комплектов АРМ ДНЦ организована в графической среде и полностью идентична.
Оперативная информация о состоянии устройств СЦБ в виде сетевых широковещательных пакетов постоянно поступает от КТС Тракт-ЦП» и записывается в буфер. Эта информация является базовой для задач, решаемых подсистемой. Для расшифровки поступающей информации используются файлы нормативных данных. Файлы составляются на основании таблицы распределения импульсов сигналов ТС конкретного участка.
Исходной информацией для отображения текущего поездного положения служат данные, находящиеся в буфере драйвера ввода. На основе исходных данных и нормативной информации по изображению станций и участков на экран выводится оперативное поездное положение. Информация о поездном положении обновляется синхронно с изменением содержания буфера драйвера ввода, т.е. с приходом сигналов ТС, несущих новую информацию.
Комплекс предоставляет пользователю возможность анализировать поездное положение по данным архивных файлов каналов ДЦ с выдачей времени записи и возможностью пошагового просмотра архивных файлов.
Работа программной среды пользователя АРМ ШЧД организована в диалоговом режиме посредством кнопочного меню. После загрузки и инициализации программного обеспечения на экране появляется изображение главного меню, имеющего следующие разделы:
интегрированная информация о приеме сигналов ТС всеми каналами системы;
оперативная информация о состоянии сигналов по подключенным каналам ТС системы ДЦ;
оперативная поездная информация по контролируемому участку;
архивная информация о сигналах каналов ТС, представленная в виде таблицы импульсов;
архивная информация о поездной информации на контролируемом участке и станциях;
программный осциллограф каналов;
архив ТУ;
администрирование сети;
справочная информация пользователя.
Раздел выбирается нажатием соответствующей функциональной клавиши. Переход в другой режим возможен в любой момент времени.
В верхней строке экрана видеомониторов выдается оперативная информация о работоспособности аппаратных средств. Нарушение обмена с каналом сопровождается соответствующей надписью. При восстановлении ввода информации работа продолжается автоматически.
Программное обеспечение КТС «Тракт-ЛП» делится на пять частей: технологическое, инструментальное, системное, объектное, прикладное.
Технологическое ПО обеспечивает загрузку программ в модули, тестирование и отладку на этапе производства, во время проведения пуско-наладочных и ремонтных работ.
Инструментальное ПО предназначено для разработки и корректировки прикладного и системного программного обеспечения модуля «Мастер» и функциональных модулей.
Системное ПО обеспечивает безопасное и надежное функционирование прикладного программного обеспечения.
Объектное ПО отражает особенности каждой конкретной станции диспетчерского участка и позволяет выполнять такие функции, как накопление маршрутов, исключение враждебных маршрутов, разделение команд во времени (без наложения при серии команд ТУ) и др.
Прикладное ПО состоит из программных модулей связи с верхним уровнем, программных модулей связи с периферийными контроллерами и программного модуля анализа команд верхнего уровня.
Функционирование системы. Оперативная информация о состоянии устройств СЦБ в виде сетевых адресных широковещательных пакетов постоянно поступает на вход АРМа ДНЦ и АРМа ШН от КТС «Тракт-ЦП», записывается в буфер, выводится на экран монитора (табло) поездного диспетчера. Эта информация является базовой для задач, решаемых комплексом.
Работа технических средств сопряжения с ДЦ диагностируется при активизации соответствующего режима комплекса (в случае аналоговых каналов связи это «Осциллограф»). В результате одновременно с данными состояния каналов ТС в АРМ ШЧД поступает информация о характере сигналов ТС запрошенного канала с возможностью регулировки их уровня.
Архив работы каналов ДЦ ведется или выделенной ПЭВМ — архиватором или посредством АРМа ШЧД. Его архиватор предназначен для записи на диск информации, принятой от системы ДЦ. В архиве сохраняются время события и протоколы с максимальным отклонением при записи на диск не более 5,5 с. Критерием необходимости новой записи ТС является изменение состояния хотя бы одного из контролируемых устройств СЦБ. Предусматривается передача информации о сбое задачи формирования системных сообщений.
Исходными данными для отображения текущего поездного положения служит информация, находящаяся в буфере драйвера ввода. На основе исходных данных и нормативной информации по изображению станций и участков на экран выводится оперативное поездное положение. Обновление информации о поездном положении происходит синхронно с изменением содержания буфера драйвера ввода, т.е. с приходом сигналов ТС, несущих новую информацию.
АРМ ШН предоставляет пользователю возможность анализировать поездное положение по данным архивных файлов каналов ДЦ с выдачей времени записи и возможностью пошагового просмотра архивных файлов (ТС, ТУ, отказы, статусы компьютеров).
АРМ ЭНЦ принимает информацию о состоянии энергообъектов, поступающую с контролируемых пунктов, и выдает ее на экраны мониторов автоматизированных рабочих мест энергодиспетчеров, а также посылает управляющие воздействия на энергообъекты КП.
КТС «Тракт-ЦП» осуществляет обмен информацией между АРМом ПУ и контролируемыми пунктами кадрами. Он автоматически собирает информацию на каждом контролируемом пункте с систем ДЦ, ЭЦ, АБ и ПАБ с использованием модулей «Ввод» по основному и резервному комплектам, обрабатывает ее и передает в активный модуль «Мастер» по основной локальной сети.
Информация на ПУ передается с основного и резервного модулей «Мастер».
Комплекс технических средств «Тракт-ЛП» принимает команды телеуправления и команды управления КП из ПУ по основному и резервному комплектам с использованием модулей связи, обрабатывает их, обнаруживает и исправляет ошибки. Модуль «Мастер локальной сети» определяет в зависимости от поездного положения на контролируемом пункте корректность принятой из диспетчерского центра команды ТУ и при положительном решение передает разрешение в соответствующий модуль «Вывод» или «Вывод ответственных команд» по локальной сети. Данные модули, приняв команду ТУ из модуля «Мастер локальной сети», воздействуют на устройства ДЦ, ЭЦ, АБ и ПАБ, управляя объектами этих систем.
Ответственные команды ТУ выдаются модулем «Вывод ответственных команд» при выполнении следующих условий:
возможность выдачи принятой ответственной команды ТУ при существующем поездном положении на контролируемом пункте (определяется модулем «Мастер локальной сети»);
полная работоспособность всех функциональных узлов модуля «Вывод ответственных команд» (самоконтроль модуля).
Воздействия на исполнительные устройства выдаются с двух процессоров модуля «Вывод ответственных команд» на блок управления ключами одновременно с проверкой правильности воздействия по схеме.