| Скачать .docx |
Курсовая работа: Система управления в радиозоне
|
|||
|
|||
|
|||
Оглавление
Общая характеристика системы управления..
Выбор основных технических характеристик системы..
Структура и спектр группового сигнала..
Контур управления и его анализ..
Расчет энергетического потенциала радиолинии..
Разработка и описание функциональной схемы радиолинии..
Блок-схема и описание передатчика:.
Блок-схема и описание приемника..
Общая схема устройства..
Заключение..
Список литературы..
Общая характеристика системы управления.
Система наведения по радиозоне обеспечивает движение снаряда в заданной вертикальной плоскости. В системе используется радиолиния с амплитудной модуляцией при непрерывном режиме излучения.
Пусть в пункте управления (ПУ) расположена передающая антенна, диаграмма направленности которой с максимумом, развернутым на угол φ от оси Z , периодически с частотой манипуляции Fmh переключается из положения «1» в положение «2», находясь в обоих положениях одинаковое время, равное Тмн /2 . Амплитудное равносигнальное направление, формируемое в плоскости OZ , называется радиозоной. В пределах радиозоны амплитуда несущего колебания, излучаемого передатчиком ПУ, не меняется при переключении диаграммы направленности антенны из положения «1» в положение "2". Чтобы определить направление отклонения ЛА от радиозоны, сигналы, излучаемые антенной в положении «1» и «2» ее диаграммы направленности, имеют характерные отличия, «окраску». «Окраска» сигналов обеспечивается амплитудной модуляцией несущего колебания поднесущими частотами FП1 и FП2 .

Выбор основных технических характеристик системы.
Выбор несущей частоты. Антенна бортового приемника находится в хвостовой части ЛА, поэтому диапазон радиоволн должен быть таким, чтобы он попадал в диапазон прозрачности (сантиметровый диапазон).
Выбор угловой чувствительности антенны.

Увеличить угловую чувствительность антенны можно увеличить двумя способами: увеличением ![]() , либо уменьшением
, либо уменьшением ![]() . Но при этом надо учитывать, что уменьшение
. Но при этом надо учитывать, что уменьшение ![]() приведет к тому, что возрастает вероятность потери ЛА. Увеличение
приведет к тому, что возрастает вероятность потери ЛА. Увеличение ![]() приводит к уменьшению отношения сигнал/шум при полете снаряда. В данной курсовой при расчете возьмем максимальный угол отклонения снаряда 30° при глубине модуляции 80%. Хотя реально такой угол отклонения без потери ЛА может быть только на начальном участке полета.
приводит к уменьшению отношения сигнал/шум при полете снаряда. В данной курсовой при расчете возьмем максимальный угол отклонения снаряда 30° при глубине модуляции 80%. Хотя реально такой угол отклонения без потери ЛА может быть только на начальном участке полета.
| Название параметра | Значение параметра |
| Частота несущей | |
| Частота манипуляции | |
| Частота первой поднесущей | |
| Частота второй поднесущей |
Полоса сигнала при таких параметрах ![]() (без учета боковых лепестков). Уровень переходных помех, возникающих в приемнике из-за перекрывающихся АЧХ полосовых фильтров, достаточно низкий.
(без учета боковых лепестков). Уровень переходных помех, возникающих в приемнике из-за перекрывающихся АЧХ полосовых фильтров, достаточно низкий.
Структура и спектр группового сигнала.
Временная структура сигнала, принимаемого летательным аппаратом (ЛА) при различных его положениях относительно равносигнальной зоны, и соответствующий спектральный состав приведены на нижеследующих рисунках.
В общем случае в состав спектра принимаемого сигнала входят три группы частот:
– ![]() ;
;
– ![]() ;
;
– ![]() .
.
Схематическое изображение спектров:

Спектры и сигналы, полученные при моделировании системы с помощью программы SystemVue (для простоты моделирования вместо ![]() используется частота
используется частота ![]() ):
):
![]()

![]()


![]()


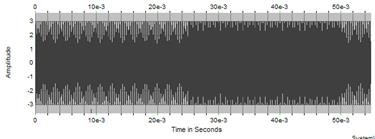
При нахождении ЛА в радиозоне принимаемый сигнал модулирован только, поднесущими частотами. Вспектре отсутствуют боковыесоставляющие первой группы частот, а мощности гармоник по второй и третьей группам частот одинаковы. При отклонении ЛА от радиозоны принимаемый сигнал оказывается дополнительно промодеулированным по амплитуде прямоугольными колебаниями частоты манипуляции диаграммы направленности антенны. При этом в спектре сигнала появляются боковые частоты в окрестностях частоты несущего колебания и изменяется относительный уровень спектральных составляющих, обусловливаемых частотами поднесущих.
Итак, информация о местоположении ЛА в принимаемом на его борту сигнале заключена:
1) в глубине амплитудной модуляции несущего колебания сигналом частоты манипуляции FMH и в фазе этого сигнала; при этом значение коэффициента амплитудной модуляции mA характеризует величину углового отклонения ЛА от радиозоны, а фаза огибающей – направление отклонения;
2) в соотношении мощностей по второй и третьей спектральным группам сигнала; при этом значение коэффициента мощностной модуляции mP характеризует величину углового отклонения ЛА от радиозоны, а знак «±» коэффициента mP указывает направление отклонения.
Информационные параметры сигнала mP
и mA
связаны с угловым отклонением ![]() ЛА от радиозоны следующими зависимостями:
ЛА от радиозоны следующими зависимостями:
где ![]() – коэффициент чувствительности равносигнальной зоны.
– коэффициент чувствительности равносигнальной зоны.
В данной курсовой работе будет разработана схема, где инормационным параметром является mA .
Контур управления и его анализ.
Командный сигнал ![]() , формируемый на борту ЛА, связан с угловым отклонением от радиозоны зависимостью:
, формируемый на борту ЛА, связан с угловым отклонением от радиозоны зависимостью:
 ,
,
где ![]() – коэффициент передачи фазового детектора,
– коэффициент передачи фазового детектора, ![]() – коэффициент усиления канала сигнала ошибки,
– коэффициент усиления канала сигнала ошибки, ![]() – уровень опорного напряжения,
– уровень опорного напряжения, ![]() – входное сопротивление приемной антенны,
– входное сопротивление приемной антенны, ![]() – мощность передатчика ПУ,
– мощность передатчика ПУ, ![]() – коэффициент направленного действия передающей антенны ПУ,
– коэффициент направленного действия передающей антенны ПУ, ![]() – эффективная площадь приемной антенны ЛА,
– эффективная площадь приемной антенны ЛА, ![]() – максимальное удаление ЛА от ПУ, на которое рассчитано управление.
– максимальное удаление ЛА от ПУ, на которое рассчитано управление.
Исходя из принципа работы системы и ее функционального построения, можно построить структурную схему замкнутого контура (рис. 6).

Направление полета ЛА определено равносигнальной зоной, и управление подчинено условию ![]() . Фактическое направление движения ЛА характеризуется углом отхода
. Фактическое направление движения ЛА характеризуется углом отхода ![]() , являющимся ошибкой управления. Угловая ошибка управления подается на радиозвено РЗ, связывающее угловое отклонение ЛА от радиозоны
, являющимся ошибкой управления. Угловая ошибка управления подается на радиозвено РЗ, связывающее угловое отклонение ЛА от радиозоны ![]() с командным напряжением
с командным напряжением ![]() . Эта связь осуществляется так.
. Эта связь осуществляется так.
Первый элемент радиозвена преобразует угловое отклонение ![]() ЛА от радиозоны в коэффициент амплитудной модуляции mA
несущей частоты частотой манипуляции FMH
. Коэффициент передачи первого элемента равен угловой чувствительности равносигнальной зоны
ЛА от радиозоны в коэффициент амплитудной модуляции mA
несущей частоты частотой манипуляции FMH
. Коэффициент передачи первого элемента равен угловой чувствительности равносигнальной зоны
![]()
Вторым элементом радиозвена является преобразователь коэффициента амплитудной модуляции mA в командное напряжение. Коэффициент передачи преобразователя

Третий элемент радиозвена – фильтр командного сигнала с передаточной функцией ![]() , при этом
, при этом![]() .
.
Выработанное командное напряжение подается на звено автопилот - корпус, передаточная функция которого ![]() , а выходной величиной является поперечное ускорение
, а выходной величиной является поперечное ускорение ![]() . Новое угловое положение ЛА связывается с поперечным ускорением динамическим звеном. Передаточная функция динамического звена (ДЗ)
. Новое угловое положение ЛА связывается с поперечным ускорением динамическим звеном. Передаточная функция динамического звена (ДЗ)
![]() .
.
Выходная координата контура – угол ![]() .
.
Передаточнаяфункция контура управления

Расчет энергетического потенциала радиолинии.
Рассчитаем минимальную мощность передатчика, обеспечивающую управление со средней квадратической ошибкой ![]() .
.
Для системы управления в радиозоне рассматриваются две группы ошибок – аппаратурные и шумовые. Для системы управления, построенной на основе информационного параметра mA , обе группы ошибок связаны с анализом работы фазового детектора.
Если уровень шумов невелик, то влияние шума будет сказываться в основном на канале сигнала ошибки, приводя к появлению в контуре управления помехи на выходе безынерционной части контура со спектральной плотностью
![]()
где ![]() – спектральная плотность шумов на входе приемника.
– спектральная плотность шумов на входе приемника.
Средняя квадратическая ошибка управления, обусловленная шумами,
 , где
, где
Подставив в это выражение ![]() и
и ![]() , получим:
, получим:
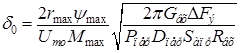 ,
,
где ![]() – максимальный угол отклонения ЛА от радиозоны, при котором система еще может управляться;
– максимальный угол отклонения ЛА от радиозоны, при котором система еще может управляться; ![]() – коэффициент модуляции, соответствующий
– коэффициент модуляции, соответствующий ![]() .
.
С помощью программы MathCad проведем расчет по вышеприведенным формулам.
Мощность передающей антенны, Вт:
![]()
Максимальное расстояние, на которое рассчитано управление, м:
![]()
Максимальный угол отклонения снаряда, на который рассчитано управление (выберем равным 30°):

![]()
Максимальный коэффицент модуляции:
![]()
Коэффициент чувствительности радиозоны:

![]()
Входное сопротивление антенны, Ом:
![]()
Коэффициент направленного действия антенны передатчика:
![]()
Эффективная площадь приемной антенны ЛА:
![]()
Спектральная плотность шума на входе приемника, Вт/Гц:
![]()
Максимальное опорное напряжение, В:
![]()
Коэффициент делителя передаточной функции динамического звена:
![]()
Передаточная функция фильтра сигнала ошибки:

Коэффициент передачи фазового детектора:
![]()
Коэффициент усиления канала сигнала ошибки (включает в себя коэффициент усиления АРУ, коэффициент чувствительности радиозоны, коэффициент передачи амплитудного детектора и дополнительное усиление, компенсирующее потери в полосовом фильтре и амплитудном детекторе):
![]()
Коэффициент передачи преобразователя коэффициента амплитудной модуляции в командное напряжение при максимальном удалении ЛА от ПУ:

![]()
Передаточная функция контура управления

Эквивалентная полоса пропускания контура управления, Гц:

![]()
Средняя квадратическая ошибка управления, обусловленная шумами:

![]()
Система очень чувствительна к помехам, так как в качестве информационного параметра используется коэффициент амплитудной модуляции. Тем не менее плюсом является то, что сигнал модулируется не на передатчике, а на борту системы, что снижает ошибку управления по сравнению с обычной амплитудной модуляцией. Также достаточно точно можно выделить опорный сигнал, промодулированный способом ЧМн-АМ и обладающий высокой помехоустойчивостью.
В общем, при высоком отношении сигнал/шум (около 60 дБ) система будет работать на максимальном расстоянии с заданной точностью.
Разработка и описание функциональной схемы радиолинии.
Блок-схема и описание передатчика:

0, 2 – генераторы поднесущих частот; 1 –генератор частоты манипуляции; 15 – переключатель поднесущих частот; 16 – амплитудный модулятор. К выходу амплитудного модулятора подключается антенна, которая переключает положение диаграммы направленности с частотой манипуляции.
Принцип работы:
Равносигнальная зона создается за счет переключения диаграммы направленности передающей антенны. Частота переключений (манипуляции) FМН =1/TМН задается генератором манипуляционной частоты 1. Диаграмма направленности находится в положениях 1 и 2 одинаковое время, равное TМН /2. Модуляция несущего колебания осуществляется с помощью генераторов поднесущих частот 0 и 2, которые подключаются к модулятору 16 передатчика через переключатель 15.
Временная диаграмма сигнала на выходе передатчика:

Блок-схема и описание приемника.

16 – система АРУ (в данной работе не проектировалась в целях упрощения и уменьшения инерционности модели); 36, 37 – амплитудный детектор; 46 – полосовой фильтр, настроенный на частоту манипуляции; 47 – линия задержки; 18 – потенциометр расстояния; 38, 41 – полосовые фильтры поднесущих частот; 42,43 и 39,40 – амплитудные детекторы поднесущих; 44 – компаратор; 45 – фильтр опорного напряжения; 50 – фильтр командного сигнала; 51 – дополнительный усилитель сигнала ошибки.
Token 36 Parameters: Function: Rectify Zero Point = 0 v Token 37 Parameters: Operator: Linear Sys Butterworth Lowpass IIR 5 Poles Fc = 10e+3 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled Token 46 Parameters: Operator: Linear Sys Chebyshev Bandpass IIR 1 Poles Low Fc = 18 Hz Hi Fc = 22 Hz Quant Bits = None Init Cndtn = 0 DSP Mode Disabled Token 47 Parameters: Operator: Delay Non-Interpolating Delay = 6e-3 sec Output 0 = Delay Output 1 = Delay - dT Token 50 Parameters: Operator: Linear Sys Butterworth Lowpass IIR 3 Poles Fc = 3 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled Token 51 Parameters: Operator: Gain Gain = 5,35 Gain Units = Linear |
Token 41 Parameters: Operator: Linear Sys Chebyshev Bandpass IIR 1 Poles Low Fc = 2,95e+3 Hz Hi Fc = 3,05e+3 Hz Quant Bits = None Init Cndtn = 0 DSP Mode Disabled Token 42 Parameters: Function: Rectify Zero Point = 0 v Token 43 Parameters: Operator: Linear Sys Butterworth Lowpass IIR 3 Poles Fc = 100 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled |
Token 38 Parameters: Operator: Linear Sys Chebyshev Bandpass IIR 1 Poles Low Fc = 5,95e+3 Hz Hi Fc = 6,05e+3 Hz Quant Bits = None Init Cndtn = 0 DSP Mode Disabled Token 39 Parameters: Function: Rectify Zero Point = 0 v Token 40 Parameters: Operator: Linear Sys Butterworth Lowpass IIR 3 Poles Fc = 100 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled |
Token 44 Parameters: Operator: Compare Comparison = '>=' True Output = 10 v False Output = 0 v A Input = t43 Output 0 B Input = t40 Output 0 Token 45 Parameters: Operator: Linear Sys Butterworth Bandpass IIR 1 Poles Low Fc = 18 Hz Hi Fc = 22 Hz Quant Bits = None Init Cndtn = Transient DSP Mode Disabled |
Сигнал, принятый приемной антенной, после усиления и преобразования в ВЧ тракте детектируется амплитудным детектором. Низкочастотная часть приемника разделена на два канала: канал сигнала ошибки и канал опорного сигнала. Сигнал с выхода амплитудного детектора 37 параллельно подается на фильтр сигнала ошибки и фильтры поднесущих частот. С выхода фильтра сигнала ошибки снимается гармоническое колебание, амплитуда которого пропорциональна коэффициенту модуляции mA
, то есть угловому отклонению ![]() ЛА от радиозоны, а фаза зависит от направления отклонения. Полосовые фильтры поднесущих частот, компаратор и фильтр опорного сигнала образуют опорный канал. Линия задержки в канале сигнала ошибки нужна из-за неодинаковых аппаратурных задержек в опорном канале и канале сигнала ошибки. Опорный сигнал и сигнал ошибки поступают на фазовый детектор, который осуществляет их перемножение. После фильтра командного сигнала выделяется командное напряжение, величина и знак которого определяется величиной и направлением отклонения ЛА от радиозоны. В данной модели после фильтра командного сигнала стоит еще дополнительный усилитель, для более точной подстройки коэффициента усиления.
ЛА от радиозоны, а фаза зависит от направления отклонения. Полосовые фильтры поднесущих частот, компаратор и фильтр опорного сигнала образуют опорный канал. Линия задержки в канале сигнала ошибки нужна из-за неодинаковых аппаратурных задержек в опорном канале и канале сигнала ошибки. Опорный сигнал и сигнал ошибки поступают на фазовый детектор, который осуществляет их перемножение. После фильтра командного сигнала выделяется командное напряжение, величина и знак которого определяется величиной и направлением отклонения ЛА от радиозоны. В данной модели после фильтра командного сигнала стоит еще дополнительный усилитель, для более точной подстройки коэффициента усиления.
Потенциометр дальности, формирующий командный сигнал Uкх, пропорциональный линейному отклонению ЛА от радиозоны, управляется программным механизмом.
Конструктивные требования к приемнику:
1. Небольшая масса и размеры. Так как приемник находится на борту ЛА, вес и размеры оборудования играют значительную роль.
2. Высокое быстродействие. Задержки в обработке могут привести к потере ЛА.
3. Небольшая стоимость оборудования. Так как подобные системы ставятся обычно на снаряды, их стоимость должна быть как можно более низкой, а технология изготовления – наиболее простой.
4. Низкое энергопотребление. Так как время управление составляет порядка нескольких минут, а питание подается от аккумуляторного источника на борту, мощность потребления системы должна быть минимальной.
5. Минимальная чувствительность к вибрациям, перегрузкам, температуре.
Исходя из этого, при моделировании были использованы наиболее простые элементы. В качестве полосовых фильтров использованы фильтры 1-го порядка, то есть практически резонансные контуры. Усилители можно реализовать при помощи ОУ. Компараторы продаются в виде готовых микросхем. Например, 521СА2. В качестве амплитудных детекторов можно использовать диоды в сочетании с простейшими интегрирующими цепочками 2-3 порядка. Для уменьшения затухания сигнала можно использовать и активные фильтры на ОУ.
Приемная антенна располагается в хвостовой части ЛА, поэтому должна быть небольших размеров (около 30 см).
Временные диаграммы в приемнике.
Сигнал на входе приемника

Демодулированный сигнал (выход 37)

Сигнал на выходе детектора огибающей первой поднесущей (выход 43)

Сигнал на выходе детектора огибающей второй поднесущей (выход 40)

Опорное напряжение (выход 45)

Напряжение на выходе фильтра сигнала ошибки (выход 47)

Командный сигнал (выход 51)
Общая схема устройства.

8 – устройство имитации радиолинии. Ослабляет сигнал в зависимости от дальности от ЛА от пункта управления, модулирует сигнал в зависимости от углового отклонения ЛА от радиозоны, добавляет шум в линию связи.
19 – простейшая имитация передаточной функции снаряда. В качестве инерционного звена используется фильтр ФНЧ. Также эта подсистема переводит командное напряжение в отклонение в градусах.
7 – источник, задающий удаление от ЛА до пункта управления (в метрах).
11 – генератор шума в радиолинии.
3, 13, 14 – генератор случайного отклонения снаряда от радиозоны.
5 – генератор заданного отклонения снаряда от радиозоны (в градусах).
29 – переключатель заданного и случайного отклонения снаряда. Управляется источником 6. Если сигнал на выходе 6 равен 1, то отклонение задается вручную; если 0, то генерируется автоматически.
59 – селектор режима работы. Управляется источником 4. Если на выходе системы 0, то система разомкнута; если 1 – замкнута.
Разработанное устройство соответствует заданию. Хотя используемый в нем способ управления прилично устарел и не обладает отличными характеристиками, он все еще остается достаточно удобным, простым и дешевым для вывода летательного аппарата в район нахождения цели.
1. В.Н. Типугин, В.А. Вейцель. «Радиоуправление». М., «Радио и связь», 1962.
2. «Основы радиоуправления». Под ред. В.А. Вейцеля, В.Н. Типугина. М., «Сов. радио», 1973
3. Паршин В.С., Кулакова М.В. Система управления в радиозоне. Рязань, РГРТУ, 2006.