| Скачать .docx |
Реферат: Системы с прерывистым входным сигналом. Математическое описание дискретных систем
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра РТС
РЕФЕРАТ
На тему:
"Системы с прерывистым входным сигналом. Математическое описание дискретных систем "
МИНСК, 2008
Системы с прерывистым входным сигналом. Функциональные схемы
В радиотехнических системах часто в качестве носителя информации используют импульсный сигнал (импульсные РЛС, сканирование диаграммы направленности или переключение процесса слежения с одного объекта на другой и т.д.). В этом случае на вход дискриминатора поступает периодический импульсный сигнал (рис.1).
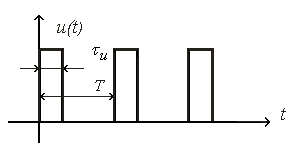
Рис.1. Импульсный сигнал на входе дискриминатора.
Функциональные схемы следящих систем при наличии прерываний входного сигнала приведены на рис.2, 3. Схема (рис.2) отличается от обобщенной функциональной схемы радиоэлектронной следящей системы наличием ключа Кл, размыкаемого во время пауз. На рис.3 представлена схема с фиксатором, который препятствует пропаданию напряжения на входе фильтра в промежутке между импульсами.

Рис.2. Функциональная схема следящей системы с прерывистым входным сигналом: Дис – дискриминатор; ОГ – опорный генератор.
Фиксатор (экстраполятор нулевого порядка) состоит из сумматора ![]() , линии задержки на время
, линии задержки на время ![]() и интегратора Инт. В фиксаторе во время действия импульса полезного сигнала на входе интегратор заряжается до некоторого уровня, который сохраняется до прихода очередного импульса. Перед приходом очередного импульса интегратор разряжается задержанным на время
и интегратора Инт. В фиксаторе во время действия импульса полезного сигнала на входе интегратор заряжается до некоторого уровня, который сохраняется до прихода очередного импульса. Перед приходом очередного импульса интегратор разряжается задержанным на время ![]() отрицательным импульсом, поступающим через линию задержки.
отрицательным импульсом, поступающим через линию задержки.

Рис.3. Функциональная схема следящей системы с фиксатором.
Временные диаграммы, поясняющие принцип работы фиксатора, приведены на рис.4.
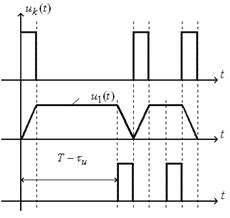
Рис.4. Временные диаграммы, поясняющие принцип работы фиксатора.
Использование фиксатора позволяет обеспечить необходимый коэффициент усиления контура.
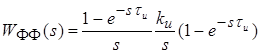
Передаточная функция фиксатора:
![]() (1)
(1)
Если ![]() ,
,
![]() , (2)
, (2)
где ![]() ─ коэффициент передачи интегратора (величина обратная постоянной времени).
─ коэффициент передачи интегратора (величина обратная постоянной времени).
Структурные схемы систем
Структурная схема системы с прерывистым входным сигналом без фиксатора отличается от схемы системы с непрерывным входным сигналом наличием ключа перед звеном с передаточной функцией Wф(р) (рис.5). При использовании фиксатора схема дополняется звеном с передаточной функцией, определяемой выражениями (1) или (2).

Рис.5. Структурная схема системы с прерывистым входным сигналом:
![]() ─ крутизна дискриминационной характеристики;
─ крутизна дискриминационной характеристики; ![]() ─ флюктуационная составляющая
─ флюктуационная составляющая
Коэффициент передачи ключа (рис.9.6)
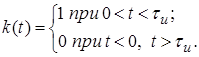
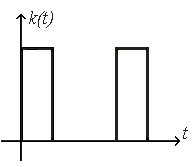
Рис.6. Коэффициент передачи ключа.
Наличие ключа делает процесс регулирования прерывистым, а системы – системами с переменными во времени параметрами.
Анализ таких систем определяется соотношениями между длительностью импульса, полосой пропускания следящей системы и частотой повторения импульсов.
Если частота повторения импульсов много больше полосы системы, то анализ может быть осуществлен методами анализа непрерывных систем.
Если же это условие не выполняется и за время ![]() происходит значительное изменение ошибки слежения, то такие системы называют системами с конечным временем съема данных, или импульсными системами. Анализ их осуществляется отдельно в момент отсутствия и наличия сигнала на входе, затем решения сшиваются.
происходит значительное изменение ошибки слежения, то такие системы называют системами с конечным временем съема данных, или импульсными системами. Анализ их осуществляется отдельно в момент отсутствия и наличия сигнала на входе, затем решения сшиваются.
Если же за время ![]() ошибка меняется незначительно, анализ системы можно существенно упростить, представив систему прерывистого регулирования как дискретную. Дискретными называют системы, в которых сигналы подвергаются дискретизации по времени.
ошибка меняется незначительно, анализ системы можно существенно упростить, представив систему прерывистого регулирования как дискретную. Дискретными называют системы, в которых сигналы подвергаются дискретизации по времени.
Рассмотрим методику перехода к дискретной системе на примере системы прерывистого регулирования без фиксатора.
Чтобы получить структурную схему дискретной системы, вместо ключа вводят импульсный элемент (рис.7), коэффициент передачи которого является последовательностью дельта-функций
 .
.
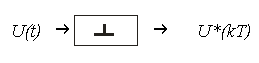
Рис.7. Изображение импульсного элемента на структурной схеме
Импульсный элемент преобразует непрерывную функцию в последовательность модулированных по площади дельта-функций:
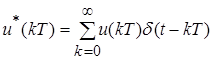 , (3)
, (3)
где ![]() ─ модулированная по площади дельта-функция (рис.8);
─ модулированная по площади дельта-функция (рис.8);
![]() ─ дискретная функция (рис.9).
─ дискретная функция (рис.9).
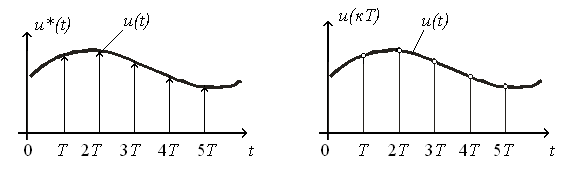
Рис.8. Модулированная.
Рис.9. Дискретная функция, последовательность дельта-функций.
Дискретная функция в тактовых точках равна исходной непрерывной, а в промежутках между тактовыми точками равна нулю (см. рис.9).
Импульсный элемент преобразует непрерывную функцию в дискретную и модулирует ее по площади.
Импульсы напряжения на выходе ключа имеют конечную длительность, и коэффициент передачи его равен единице в замкнутом состоянии, а на выходе импульсного элемента формируется последовательность дельта-функций.
Чтобы обеспечить подобие процессов на выходе ключа и выходе заменяющего его импульсного элемента, необходимо последовательно с импульсным элементом включить формирующий фильтр.
Импульсная характеристика формирующего фильтра ![]() ─ реакция системы на последовательность дельта-функций. Она должна быть равна коэффициенту передачи ключа:
─ реакция системы на последовательность дельта-функций. Она должна быть равна коэффициенту передачи ключа:
![]() .
.
Передаточная функция формирующего фильтра является преобразованием Лапласа от импульсной характеристики:
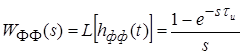 .
.
Процесс ее формирования можно представить как преобразование Лапласа разности двух ступенчатых функций (разность изображений по Лапласу единичной ступенчатой функции и этой же функции, задержанной на длительность импульса).
Условием эквивалентности ключа и импульсного элемента с формирователем является незначительное изменение ошибки в моменты действия импульса.
С учетом проведенных преобразований структурная схема может быть представлена в виде рис.10.
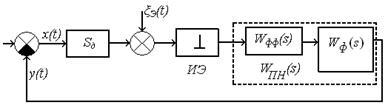
Рис.10. Структурная схема дискретной системы.
![]() называется передаточной функцией приведенной непрерывной части системы:
называется передаточной функцией приведенной непрерывной части системы:
![]() ;
;
при наличии фиксатора передаточная функция звена
 .
.
Если ![]() , то
, то ![]() можно приближенно записать в виде
можно приближенно записать в виде
![]() ;
;
.
Обычно полагают, что ![]() .
.
Тогда
![]() .
.
Эквивалентная флюктуационная составляющая отличается от флюктуационной составляющей непрерывной системы. Ее дисперсия равна
![]() .
.
Таким образом, в дискретной системе закон изменения параметров определяется только периодом повторения импульсов.
Математическое описание дискретных систем
Z-преобразование и его свойства
Для описания и анализа дискретных систем используется соответствующий математический аппарат: интегрирование заменяется суммированием, дифференцирование – конечной разностью, вместо дифференциальных уравнений используются разностные уравнения. Наряду с разностными уравнениями при анализе систем используются также дискретные преобразования Фурье и Лапласа, z-преобразование и другие.
Дискретное преобразование Лапласа:
 ,
,
где ![]() ─ изображение;
─ изображение; ![]() ─ оригинал.
─ оригинал.
Для анализа систем преобразование Лапласа неудобно, так как изображение является трансцендентной функцией переменной. Поэтому путем замены переменной
![]()
переходят к z-преобразованию:
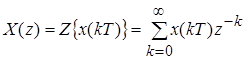 .
.
Основные свойства z-преобразования определяются рядом теорем:
- теорема обращения, позволяющая по изображению определить оригинал:  ;
;
- z-изображение суммы или разности дискретных процессов:
![]() ;
;
- z-изображение произведения постоянной величины и дискретного процесса:
![]() ;
;
- теорема о конечном значении оригинала:
![]() ;
;
- теорема о начальном значении оригинала:
![]() ;
;
- теорема свертки оригиналов:
![]() ;
;
- теорема запаздывания: при ненулевых начальных условиях ─
 ;
; ![]() ;
;
при нулевых начальных условиях ─
![]() ;
;
- z - преобразование непрерывной функции времени:
![]() ,
,
где ![]() ─ непрерывная величина.
─ непрерывная величина.
Z-преобразование изображения по Лапласу непрерывного процесса по определению совпадает с z-преобразованием процесса ![]() :
:
![]() ;
;
![]() ,
,
где ![]() ─ непрерывная величина.
─ непрерывная величина.
Таким образом,
![]() .
.
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш. шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов. / Под ред. В.А. Бесекерского. - М.: Высш. шк., 2005.
3. . Первачев С.В. Радиоавтоматика: Учебник для вузов. - М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации / Под ред. М.И. Жодзишского – М.: Радио, 2000.