| Скачать .docx | Скачать .pdf |
Реферат: Основные сведения из векторной алгебры
Векторная алгебра
Основные сведения из векторной алгебры. Различают два рода величин: скалярные и векторные.
1. Если некоторая величина вполне определяется ее числовым значением, то ее называют скалярной. Примерами скалярных величин могут служить: масса, плотность, работа, сила тока, температура. Скаляры являются алгебраическими величинами и с ними можно производить любые алгебраические действия: сложение, вычитание, умножение, деление, возведение в степень и т. д.
2. Если при определении некоторой величины для ее полной характеристики, кроме числового значения, надо знать и ее направление, то такая величина называется векторной, или вектором. Примерами векторных величин являются скорость, ускорение, сила. Длина вектора называется также его модулем, или абсолютной величиной.
3. Вектор обозначается графически отрезком прямой, на котором ставится стрелка, указывающая направление вектора (см. рисунок).
Будем обозначать вектор одной буквой с черточкой над ней, например, , а модуль этого вектора - той же буквой, только без черточки над ней, т. е. a. Модуль вектора a часто обозначается .
Вектор будем также обозначать , где A - начало и B - конец вектора, а его модуль - теми же буквами, но без черточки наверху.
4. Вектор равен нулю, если его модуль равен нулю. Такой вектор называется нулевым.
5. Два вектора и называются равными, если: 1) равны их модули, 2) они параллельны и 3) направлены в одну и ту же сторону.
Два вектора с равными модулями, лежащие на параллельных прямых, но противоположно направленные, называются противоположными. Вектор, противоположный вектору , обозначается через .
6. Сложение векторных величин производится по правилу параллелограмма: сумма двух векторов и , приведенных к общему началу, есть третий вектор , длина которого равна длине параллелограмма, построенного на векторах и , а направлен он от точки A к точке B (см. рисунок):
Модуль вектора вычисляется по формуле
(1)
7. Сумму нескольких векторов, например , , и , строят так: берут произвольную точку O плоскости и из нее строят вектор , равный вектору ; из точки A проводят вектор , равный вектору , из точки B - вектор , равный вектору и, наконец, из точки C строят вектор , равный вектору . Вектор , замыкающий полученную ломаную линию OABCD, и будет суммой векторов , , и (см. рисунок ниже):
По такому же правилу строится и сумма любого числа векторов.
8. Разностью двух векторов и называется такой третий вектор , который равен сумме векторов и (см. рисунок). Вектор параллелен вектору , равен ему по модулю, но противоположно направлен:
9. При умножении вектора на скаляр k получается вектор , модуль которого равен модулю вектора , умноженному на k, т. е. b = ak. Направления векторов и совпадают, если k > 0, и они противоположны, если k < 0. Имеем
, или .
10. Два вектора, лежащие на параллельных прямых, независимо от того, направлены они одинаково или противоположно, называются коллинеарными.
11. Единичным вектором, или ортом данного вектора, называется вектор, совпадающий по направлению с данным вектором и имеющий модуль, равный единице.
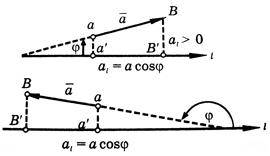
12. Проекцией вектора на ось называется длина отрезка A'B', заключенного между проекциями конца и начала вектора на эту ось. Этой длине приписывается знак плюс, если направление отрезка A'B' совпадает с направлением оси, и знак минус, если его направление противоположно направлению оси
Проекция вектора на ось есть скалярная величина, равная произведению модуля проектируемого вектора на косинус угла между положительными направлениями оси и вектора (см. рисунок).
Проекция вектора на ось обозначается через al или , а угол между осью и вектором будем обозначать так: . Таким образом, ![]() =
=![]() Если - углы, образованные вектором с координатными осями Ox, Oy и Oz прямоугольной системы координат, то проекции вектора на координатные оси будут равны
Если - углы, образованные вектором с координатными осями Ox, Oy и Oz прямоугольной системы координат, то проекции вектора на координатные оси будут равны
![]()
![]()
![]()
В дальнейшем предполагается, что система координат - прямоугольная.
Модуль вектора через его проекции на оси прямоугольной системы координат вычисляется по формуле
![]()
![]()
т. е. модуль вектора равен арифметическому значению квадратного корня из суммы квадратов его проекций.
Вектор равен нулю, если все три его проекции равны нулю (этим положением пользуются, например, в механике при выводе необходимых и достаточных условий равновесия тела под действием системы сил, проходящих через одну точку)
Если векторы и равны, то равны и их проекции:
a1x = a2x; a1y = a2y; a1z = a2z. (5)
Если для вектора известны координаты его начала A(x1, y1, z1) и координаты его конца B(x2, y2, z2), то проекции вектора на координатные оси определяются по формулам
ax = x2 - x1; ay = y2 - y1; az = z2 - z1, (6)
а модуль вектора в этом случае определится по формуле
(7)
Очевидно, что по формуле (7) следует вычислять и расстояние между точками A(x1, y1, z1) и B(x2, y2, z2).
13. Проекция суммы векторов на какую-нибудь ось равна алгебраической сумме проекций этих векторов на ту же ось.
Из векторного равенства
(8)
следуют такие три скалярные равенства:
ax = a1x + a2x + a3x + ... + anx;
ay = a1y + a2y + a3y + ... + any; (9)
az = a1z + a2z + a3z + ... + anz.
14. Если - векторы, по модулю равные единице и направленные по координатным осям Ox, Oy и Oz, то разложение вектора по трем координатным осям выражается формулой
(10)
где ax, ay и az - проекции вектора a на координатные оси - называются координатами вектора (если вектор имеет координаты ax, ay, az, то это обозначается так: {ax, ay, az}). Если вектор имеет начало в начале координат, а его конец A имеет координаты x, y и z, то тогда его проекции на координатные оси равны координатам его конца:
ax = x; ay = y; az = z.
В этом случае вектор называется радиусом-вектором точки A. Радиус-вектор точки обозначается обыкновенно через (см. рисунок):
(11)
а модуль радиуса-вектора точки A(x, y, z) вычисляется по формуле
(12)