| Скачать .docx | Скачать .pdf |
Реферат: Элементы фрактальной теории
Нелінійна динаміка. Теорія хаосу. Фронтальна геометрія.
Хаотичними називаються такі динамічні системи рух яких не можна передбачити на великий проміжок часу і в яких відсутні невідомі сили і параметри.
 Повинні розрізняти випадкові і хаотичні рухи. Перший термін відноситься до ситуацій, коли нам невідомі діючі сили, або ми маємо деякі статистичні характеристики параметрів. Термін “хаотичний” використовується в тих детермінованих задачах де відсутні випадкові або непередбачувальні сили. Основоположником був Паре (854 - 912). У сучасній літературі термін “хаотичний” використовується до таких рухів у детермінованих фізичних і математичних системах, траєкторії яких виявляють сильну залежність від початкових умов.
Повинні розрізняти випадкові і хаотичні рухи. Перший термін відноситься до ситуацій, коли нам невідомі діючі сили, або ми маємо деякі статистичні характеристики параметрів. Термін “хаотичний” використовується в тих детермінованих задачах де відсутні випадкові або непередбачувальні сили. Основоположником був Паре (854 - 912). У сучасній літературі термін “хаотичний” використовується до таких рухів у детермінованих фізичних і математичних системах, траєкторії яких виявляють сильну залежність від початкових умов.
ААА…
АВАВ…
ААВАВВВ … - хаос
Періодична дія частоти викликає відгук широкого спектру частот. Збудження безперервного спектру частот, що знаходиться нижче частоти збудження є однією із особливостей хаотичних коливань. Друга властивість: втрати інформації про початкові умови.
Стала h пов’язана з поняттям ентропії у теорії інформації. Показник Ляпунова – міра швидкості розбігання близьких траєкторій системи.
Для дисипативних систем хаотична динаміка розвивається у рамках визначеної структури. Цю структуру нелегко досліджувати за допомогою звичайних методів динаміки, відкладаючи залежність відгуку від часу, або отримуючи частотний спектр. такі системи досліджуються у фазовому просторі, де і проявляються їх фрактальна структура.
Поняття фракталів.
Фрактали – множини з нецілою розмірністю Хаусдорфа-Безиковича. Поняття розмірності виникло в топології. Під розмірністю множини розуміли її топологічну розмірність. Топологічна розмірність може приймати цілі значення dt=-1,0,1,2…
-1 – характеристика пустої множини; 0 – точка; 1 – пряма; 2 – площина; …
розглядається рівномірне розподілення N 0 точок вздовж кривої.
![]() Якщо ми будемо покривати площину прямокутниками з стороною ε, причому кубів N<
N0
Якщо ми будемо покривати площину прямокутниками з стороною ε, причому кубів N<
N0
Ε зменшуємо в 2 рази, тоді ![]() (сфери радіуса ε).
(сфери радіуса ε).
Візьмемо 2-вимірну поверхню: ![]()
![]() ….
….![]()
 (1) Якщо множина S вкладається в евклідовий простір R розміром D, то для визначення розмірності Хаусдорфа – Безиковича або фрактальної розмірності використовується формула (1).
(1) Якщо множина S вкладається в евклідовий простір R розміром D, то для визначення розмірності Хаусдорфа – Безиковича або фрактальної розмірності використовується формула (1).
N(ε) – мінімальна кількість D-кубів з ребром ε, якими можна покрити множину S.
Приклади фрактальних площин.
1. Канторова множина.
Отримали спадаючу послідовність множин ![]()
Канторова множина S за визначенням отримується як перетин множин Sn . Для отримання фрактальної розмірності будемо покривати множину S відрізками зі змінною довжиною.
2. Крива Коха.
Множина будується шляхом рекурентної процедури на евклідовій площині, для якої d=2.
3. Прокладка (килим) Серпинського.
4. Губка Серпинського.
Всі розглянуті фрактали отримаються в результаті використання на кожному кроці деякої однотипної процедури або генератора, яка задається деякою геометричною фігурою. Такі фрактали називаються регулярними геометричними фракталами. Природні об’єкти рідко описуються регулярними геометричними фракталами, але для них можна виконувати точні розрахунки, які мають велике практичне значення. Такі фрактали є локально-самоподібними. Для випадкових або стохастичних фракталів локальна самоподібність реалізується в узагальненому сенсі.
Динамічні системи.
Під динамічною системою
розуміють об’єкт або процес, для якого однозначно визначено поняття стану, як сукупність деяких величин у заданий момент часу і задано оператор, що описує еволюцію системи з часом. Закон еволюції у вигляді системи диференціальних рівнянь: ![]() . Якщо розглядати величини
. Якщо розглядати величини ![]() як координати точки х
у N
-вимірному просторі, то отримаємо наочне геометричне зображення стану динамічної системи у вигляді цієї точки. Останню називають відображаючою або фазовою, а простір станів фазовим. Змінні стану системи відновлюють рух фазової точки вздовж траєкторії. Розрізняють динамічні системи з неперервним і дискретним часом. Перший називають потоками
, а другий – каскадами
. Відповідно фазовий простір є неперервним
і дискретним
.
як координати точки х
у N
-вимірному просторі, то отримаємо наочне геометричне зображення стану динамічної системи у вигляді цієї точки. Останню називають відображаючою або фазовою, а простір станів фазовим. Змінні стану системи відновлюють рух фазової точки вздовж траєкторії. Розрізняють динамічні системи з неперервним і дискретним часом. Перший називають потоками
, а другий – каскадами
. Відповідно фазовий простір є неперервним
і дискретним
.
Коливання системи поділяють на класи :
1. Лінійні і нелінійні
2. Зосереджені і розподілені
3. Консервативні і дисипативні
4. Автономні і неавтономні
Особливим класом є автоколивальні. Хаотичні коливання з’являються в нелінійних дисипативних коливальних системах, як результат ускладнення звичайних режимів регулярних періодичних коливань при зміні керуючих параметрів системи.
Динамічні системи, що моделюються обмеженим числом диференціальних рівнянь називаються зосередженими (для них скінчений вимірний фазовий простір і обмежене число ступенів свободи). Математичні моделі розподільних систем – це рівняння у частинних похідних або інтегральні рівняння (для них не можна визначити скінчений вимірний простір і число ступенів свободи). Для консервативних систем, які характеризуються незмінним у часі запасом енергії елемент фазового простору не змінюється з часом. Динамічні системи зі змінним у часі запасом енергії називаються неконсервативними. Якщо це тертя або розсіювання, то дисипативні.
Фазова площина.
Для того щоб знайти точки рівноваги системи диференціальних рівнянь потрібно прирівняти ліві частини до нуля і вирішити систему і знайти координати точок рівноваги. Після чого кожну точку рівноваги слід дослідити на стійкість, після чого будувати фазовий портрет системи. Точка рівноваги буде стійкою по Ляпунову, якщо при ![]() для кожного як завгодно
для кожного як завгодно ![]() можна вказати
можна вказати ![]() таке, що при всіх значеннях
таке, що при всіх значеннях ![]() виконуються нерівності:
виконуються нерівності:  , якщо початкові умови задовольняють нерівностям:
, якщо початкові умови задовольняють нерівностям:  . Для лінійної системи звичайних диференціальних рівнянь, пишеться характерне рівняння і в залежності від значення коренів цього рівняння визначаємо стійкість або нестійкість точки рівноваги.
. Для лінійної системи звичайних диференціальних рівнянь, пишеться характерне рівняння і в залежності від значення коренів цього рівняння визначаємо стійкість або нестійкість точки рівноваги.
1. Корені дійсні, від’ємні, різні – стійкий вузол.
![]()
2. Корені дійсні, додатні, різні – нестійкий вузол.
![]()
![]()
![]()
3. Корені дійсні, різних знаків – нестійке сідло.
![]()
![]()
![]()
4. Корені комплексні, з від’ємною дійсною частиною – стійкий фокус.
![]() ,
, ![]() , (
, (![]() )
)
5. Корені комплексі з додатньою частиною. Нестійкий фокус.
![]() ,
, ![]() , (
, (![]() )
)
6. Корені чисто мнимі. Рішення стійке – називається центр.
![]() ,
, ![]()
7. Рішення стійке.
![]() ,
, ![]()
8. Рішення нестійке .
![]() ,
, ![]()
9. Рішення стійке.
![]()
10. Рішення нестійке.
![]()
якщо нелінійна система рівнянь, то пишеться рівняння варіацій:  . Далі складається лінеарезоване рівняння і досліджується. Коли розглядається n-вимірний простір, то стійкість рівнянь визначається за знаком дійсної частини кореня. Якщо дійсна частина одного з коренів більше нуля, то рух нестійкий.
. Далі складається лінеарезоване рівняння і досліджується. Коли розглядається n-вимірний простір, то стійкість рівнянь визначається за знаком дійсної частини кореня. Якщо дійсна частина одного з коренів більше нуля, то рух нестійкий.
Регулярні і дивні атрактори динамічних систем.
Рух дисипативних систем доцільно розділяти на два класи : клас перехідних нестійких рухів, що відповідають процесу релаксації від початкової до граничної множини станів і клас сталих стаціонарних рухів, фазові траєкторії яких повністю належать граничним множинам. Притягуючи граничні множини називаються атракторами.
О1 - фокус з областю притягування 1. Граничний цикл має області притягування 2 і 3, значить атрактор – граничний цикл, а 2 і 3 – басейни для граничного циклу. Сепаратрисний контур відділяє різні області притягування атракторів. З часом довільно задане початкове положення із деякої області притягування G , що містить атрактор G0 релаксує до G0 . Рух, якому відповідає фазова траєкторія в області притягування є перехідним процесом.
У системах з розмірністю фазового простору N>3 при хаотичному русі з’являються складним чином побудовані притягуючі множини, траєкторії відображаючих точок яких не належать ні до одного з вище наведених типів атракторів. Фазові траєкторії представляються у вигляді нескінченних, що ніде не перетинаються ліній, причому при ![]() траєкторія не залишає замкненої області і не притягується до відомих типів атракторів. Такі траєкторії називаються стійкими по Пуассону
, де мається на увазі факт повернення траєкторії з часом в малий окіл початкової точки. Саме з існуванням таких траєкторій пов’язують хаотичну поведінку детермінованих динамічних систем з розмірністю фазового простору
траєкторія не залишає замкненої області і не притягується до відомих типів атракторів. Такі траєкторії називаються стійкими по Пуассону
, де мається на увазі факт повернення траєкторії з часом в малий окіл початкової точки. Саме з існуванням таких траєкторій пов’язують хаотичну поведінку детермінованих динамічних систем з розмірністю фазового простору ![]() .
.
Атрактори у вигляді граничних циклів станів рівноваги l -вимірних торів називається простими або регулярними. Рух на них відповідає стійкості по Ляпунову. З дивним атрактором пов’язано реалізацію складного регулярного коливального режиму, який схожий на стаціонарні випадкові процеси. Принципова різниця між регулярними і дивними атракторами у тому, що регулярні характеризуються стійкістю як по Ляпунову, так і по Пуассону. А дивні стійкі по Пуассону і не стійкі по Ляпунову. У фазовому просторі дивний атрактор має фрактальну структуру.
Нелінійні елементи.
Будь-яка хаотична система повинна мати нелінійні елементи або властивості. У лінійній системі не буває хаотичних коливань. У лінійній системі періодичний зовнішній вплив викликає після затухаючих перехідних процесів періодичний відгук того ж періоду.
Джерелами хаосу можуть бути такі елементи:
1. Нелінійні пружні елементи: пружини (затухання типу тертя)
2. Щілини або обмежені отвори
3. Сили, що створюються рідинами
4. Нелінійні зворотні зв’язки у системах управління
5. Нелінійні граничні умови
6. Нелінійні резистори, ємності, або індуктивні елементи електричних ланцюгів
7. Діоди
8. Електричні, магнітні сили
9. Геометричні нелінійності зв’язані з сильними деформаціями
10. Перелік систем де спостерігається хаотичні коливання
11. Коливання вигнутих пружних атракторів
12. Аеропружні системи
13. Магнітомеханічні приводи
14. Системи з обертаннями або гіроскопами
15. Лазери і нелінійні акустичні системи
Показник Ляпунова.
![]() . Якщо d0
- міра початкової відстані між двома заданими точками, то через малий проміжок часу t відстань між траєкторіями що виходять із цих точок стає рівною по формулі.
. Якщо d0
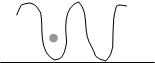
- міра початкової відстані між двома заданими точками, то через малий проміжок часу t відстань між траєкторіями що виходять із цих точок стає рівною по формулі. ![]() - показник Ляпунова. Основа 2 вибрана для зручності і може бути будь-якою. Експоненціальне розбігання хаотичних траєкторій може бути тільки локальним. Так як система обмежена, то d(t) не може зростати до нескінченності. Таким чином для того щоб визначити міру розбігання траєкторії необхідно усереднити експоненціальне зростання по багатьом точкам вздовж траєкторії, як показано на малюнку:
- показник Ляпунова. Основа 2 вибрана для зручності і може бути будь-якою. Експоненціальне розбігання хаотичних траєкторій може бути тільки локальним. Так як система обмежена, то d(t) не може зростати до нескінченності. Таким чином для того щоб визначити міру розбігання траєкторії необхідно усереднити експоненціальне зростання по багатьом точкам вздовж траєкторії, як показано на малюнку:
Обчислення показника Ляпунова починається з обраної початкової точки на сусідній траєкторії і оцінюванням величини ![]() . Коли d(t) стає дуже великим, тобто зростання від експоненціальної поведінки обираємо нову сусідню точку. Показник Ляпунова можна задати виразом:
. Коли d(t) стає дуже великим, тобто зростання від експоненціальної поведінки обираємо нову сусідню точку. Показник Ляпунова можна задати виразом: ![]()
Критерії хаосу в термінах показника Ляпунова
має вигляд ![]() - хаотичний рух,
- хаотичний рух, ![]() - регулярний рух.
- регулярний рух.
Біфуркації
Зі зміною параметрів динамічної системи може змінюватись кількість точок рівноваги і їх стійкість. Такі зміни нелінійної системи пов’язані зі зміною параметрів системи є предметом теорії біфуркацій. Ті значення параметрів при яких змінюються якісні або топологічні властивості руху називаються критичними або біфуркаційними значеннями.
Види біфуркацій:
1. Осцилограф Дуффінга
![]() якщо
якщо ![]()
якщо ![]()
Значення параметру ![]() є біфуркаційним.
є біфуркаційним.
З однієї точки з’являється три – біфуркація типу “вили”.
2. біфуркація типу Хопфа. При подальшій зміні керуючого параметру знову відбуваються біфуркації вже нових рішень. Існує деяке значення накопичення при перевищенні якого біфуркації змінюються появою хаосу.
Відображення і потоки.
Поняття потоку описує пучок траєкторій в фазовому просторі, який починається на множині близьких початкових умов. Проте, певну якісну і кількісну інформацію про систему можна отримати аналізуючи еволюцію системи на дискретно-обраних моментах часу. Зокрема, це робиться за допомогою перетинів Пуанкаре, яке дозволяє розрізнити рухи якісно відмінних типів, наприклад гармонічних, субгармонічних, хаотичних.
Відображення Пуанкаре.
При математичному дослідженні динамічних систем, відображенням називають виборку за часом даних ![]() причому вводять позначення, що
причому вводять позначення, що ![]() .
.
У простому детермінованому відображенні ![]() можна знайти за значенням
можна знайти за значенням ![]() . Поняття відображення узагальнюється і на більшу кількість змінних, так
. Поняття відображення узагальнюється і на більшу кількість змінних, так ![]() може бути вектором з М компонентами. Тоді будемо мати систему з М рівнянь.
може бути вектором з М компонентами. Тоді будемо мати систему з М рівнянь.
Припустимо ![]() , тоді будемо мати відображення:
, тоді будемо мати відображення: ![]()
Відображення Пуанкаре для систем з вимушеними коливаннями
Коли присутні примушуючий рух з періодом Т, то для отримання відображення Пуанкаре робиться виборка, коли ![]() .
.
Відображення Пуанкаре для автономних систем
Стаціонарні коливання можуть збуджуватись без періодичних, або випадкових виливів, якщо система динамічно нестійка. У такому випадку перетин Пуанкаре будується завданням у фазовому просторі орієнтованої поверхні розмірності n-1 . Після чого фіксуються точки перетину фазових траєкторій з цією поверхнею в одному і тому ж напрямку. Якщо система хаотична, то відображення Пуанкаре буде містити фрактальну структуру.
Класи структур, що зустрічаються у відображенні Пуанкаре:
1. Обмежений набір точок – це періодичні або субгармонічні коливання.
2. Замкнена крива – це квазіперіодичний рух
3. Фрактальний набір точок – це дивний атрактор у тривимірному фазовому просторі.
Відображення Фейгенбаума.
![]() - рівняння, що описує ріст популяції. Лінійні члени описують ріст або народження, а нелінійні відповідають за обмеження росту, пов’язане з обмеженням харчових або енергетичних ресурсів.
- рівняння, що описує ріст популяції. Лінійні члени описують ріст або народження, а нелінійні відповідають за обмеження росту, пов’язане з обмеженням харчових або енергетичних ресурсів.
Нехай ![]() , тоді
, тоді 
Рішення стійке, коли ![]() , і нестійке, коли
, і нестійке, коли ![]() . Отримаємо нереалістичне зростання нашої популяції. Це рівняння переписують в іншому вигляді:
. Отримаємо нереалістичне зростання нашої популяції. Це рівняння переписують в іншому вигляді: ![]() . Дістанемо точки рівноваги для відображення. Нам потрібно розв’язати рівняння
. Дістанемо точки рівноваги для відображення. Нам потрібно розв’язати рівняння ![]()
![]()
![]() Таке рівняння можна дослідити графічно:
Таке рівняння можна дослідити графічно:
Кожну точку треба дослідити на стійкість по Ляпунову. Якщо ![]() , то точка спокою нестійка;
, то точка спокою нестійка; ![]() , то точка спокою стійка.
, то точка спокою стійка.
Якщо ![]() на цьому проміжку
на цьому проміжку ![]() буде нестійкою точкою, а друга точка буде стійкою. Цей процес називається перехідним періодом. В момент, коли
буде нестійкою точкою, а друга точка буде стійкою. Цей процес називається перехідним періодом. В момент, коли ![]() обидві точки стають нестійкими.
обидві точки стають нестійкими.
Але з’являються стійкі точки періоду 2. Для того, щоб їх знайти необхідно дослідити точки рівноваги другої ітерації відображення, тобто ми будемо брати ![]() і точка буде відображатись сама в себе.
і точка буде відображатись сама в себе.
З часом маємо стійку точку і рівняння коло такої точки потрапляє на цикл періоду 2. При подальшій зміні параметра λ нові точки рівноваги знов змінюють свою стійкість і з’являються цикли з періодом 4.
Цей процес продовжується доки значення λ не досягає 3,56994 – число Фейгенбаума . При перевищенні λ цього значення з’являються хаотичні ітерації.
![]()
![]()
Перші 300 ітерацій чекаємо поки пройдуть всі перехідні процеси. Ще 300 раз, але вже виводимо значення координати на графік.
Комплексні відображення і множина Мондельброта.
Множина М є прикладом фрактальних кордонів областей притягування атракторів в фазовому просторі. Базується на двовимірному відображенні комплексної змінної ![]() ,
, ![]() . У дійсних змінних це відображення має вигляд
. У дійсних змінних це відображення має вигляд 
Якщо ![]()
![]()
![]()
![]()
При одних значеннях параметрів a і b послідовність відображень буде знаходитись в деякій обмеженій області. При других значеннях параметрів ця послідовність дуже швидко іде у нескінченність.
Приймаємо, що якщо 400 ітерацій ![]() і
і ![]() <2 то така точка належить множині М і є її атрактором.
<2 то така точка належить множині М і є її атрактором.