| Скачать .docx | Скачать .pdf |
Курсовая работа: Власні значення і власні вектори матриці
Міністерство освіти і науки України
Криворізький державний педагогічний університет
Кафедра математики
Курсова робота з математики
Власні значення і власні вектори матриці
Студента ІV курсу фізико-математичного факультету
Палія Валерія Миколайовича
Науковий керівник
ст. викладач Корольська Л. Р.
Кривий Ріг
2009 р.
З МІСТ
Вступ
Розділ І. Основні відомості з лінійної алгебри
1.1Види матриць. Дії над матрицями. Визначник
1.2Власні значення та власні вектори матриці
Розділ ІІ. Знаходження власних векторів і власних значень матриць
2.1Метод А. М. Данілевського
2.2Метод А. Н. Крилова
2.3Метод Леверрьє
2.4Метод невизначених коефіцієнтів
2.5Метод скалярних добутків для знаходження першого власного значення дійсної матриці
2.6приклади задач, що зводяться до відшукання власних значень та власних векторів матриці
Висновки
Список використаних джерел
Історично першим розділом лінійної алгебри був розділ теорії лінійних рівнянь. Згодом у зв’язку з розв’язанням системи лінійних рівнянь було введено поняття "визначник" в 1750 році Крамером. У зв’язку з вивченням лінійних рівнянь та визначників вводиться поняття матриці в 1877 році Г. Фробеніусом. В кінці 19 століття з’явився новий розділ лінійної алгебри "Власні значення та власні вектори матриць". Цей розділ має прикладне значення.
Як з’ясувалося, деякі спеціалісти донині цікавляться такою проблемою лінійної алгебри, як обчислення власних значень та власних векторів матриць. Ця проблема виникає в багатьох областях математики, механіки, інженерної справи та геології.
Актуальність нашого дослідження полягає втому, що цілий ряд| інженерних задач зводиться до розгляду систем рівнянь, що мають єдиний розв’язок лише в тому випадку, коли| відоме значення деякого вхідного в них параметра. Цей особливий параметр називається характеристичним, або власним, значенням системи. Із задачами на власні значення інженер стикається в різних ситуаціях. Так, для тензорів напруги власні значення визначає головна нормальна напруга, а власними векторами задаються напрями, пов'язані з цими значеннями. При динамічному аналізі механічних систем власні значення відповідають власним частотам коливань, а власні вектори характеризують моди цих коливань. При розрахунку конструкцій власні значення дозволяють визначати критичні навантаження, перевищення яких приводить до втрати стійкості. Вибір найбільш ефективного методу обчислення власних значень або власних векторів для даної інженерної задачі залежить від ряду чинників, таких, як тип рівнянь, число шуканих власних значень і їх характер.
Об’єктом нашого дослідження є елементи лінійної алгебри.
Предмет дослідження: методи знаходження власних значень і власних векторів матриць.
Задачі дослідження:
1) Аналіз навчальної та методичної літератури з теми дослідження.
2) Обгрунтувати методи знаходження власних векторів і власних значень матриць.
3) Навести приклади знаходження власних векторів і власних значень матриць.
Розділ І. Основні відомості з лінійної алгебри
1.1 Види матриць. Дії над матрицями. Визначник
Матрицею називається прямокутна таблиця з чисел, яка складається з деякої кількості m рядків та деякої кількості n стовпців.
Числа m і n називаються порядками матриці. У випадку, якщо m = n, матриця називається квадратною, а число m = n — її порядком. [2, стор. 10]
Щоб записати матрицю, виписують належним чином позначення її елементів та отриману таблицю беруть в дужки або обмежують подвійними лініями.
Таким чином, загальний вигляд матриці розмірності (m, n) буде таким
 ,
,  ,
,  ,
,
де aij — позначення елементів з множини C. Часто замість такого докладного запису вживають скорочений: || aij || або || aij ||m,n .
Якщо кількість рядків матриці дорівнює кількості її стовпців, то матриця називається квадратною, а кількість її рядків, що дорівнює кількості стовпців, називається порядком квадратної матриці.
Матрицю, що має тільки один рядок, називають просто рядком матриці, а кількість його елементів — довжиною рядка. В подальшому матриці будуть позначатися великими літерами латинського алфавіту.
Дві матриці називаються рівними, якщо кількість рядків і стовпців у них відповідно рівні та якщо рівні числа, що стоять на відповідних місцях цих матриць. Таким чином, одна рівність між (m, n)-матрицями рівносильна системі mn рівностей між їх елементами.
Основними матричними операціями є множення числа на матрицю або матриці на число, додавання та перемноження двох матриць. За означенням, для того щоб помножити число α на матрицю А або матрицю А на число α, необхідно помножити α на всі елементи матриці А. Наприклад,

Матриця всі елементи якої дорівнюють нулю, називається нульовою матрицею і позначається О. Якщо бажають вказати явно кількість рядків і стовпців нульової матриці, то пишуть Оmn .
Блочні матриці. Припустимо, що деяка матриця ![]() за допомогою горизонтальних і вертикальних прямих розбита на окремі прямокутні клітини, кожна з яких являє собою матрицю менших розмірів і називається блоком вихідної матриці. В такому разі виникає можливість розгляду вихідної матриці А як деякої нової (так званої блочної) матриці
за допомогою горизонтальних і вертикальних прямих розбита на окремі прямокутні клітини, кожна з яких являє собою матрицю менших розмірів і називається блоком вихідної матриці. В такому разі виникає можливість розгляду вихідної матриці А як деякої нової (так званої блочної) матриці ![]() , елементами
, елементами ![]() слугують вказані блоки.
слугують вказані блоки.
Наприклад, матрицю

можна розглядати як блочну матрицю ![]() , елементами якої слугують наступні блоки:
, елементами якої слугують наступні блоки:

Цікавим є той факт, що основні операції з блочними матрицями здійснюються за тими ж правилами, по яким вони здійснюються зі звичайними числовими матрицями, тільки в ролі елементів виступають блоки. [2, стор. 15]
Для довільної матриці А та довільних α, β мають місце такі співввідношення:
1. ![]()
2. ![]()
3. ![]()
Сумою двох матриць А і В, що мають відповідно рівну кількість рядків і стовпців, називається матриця, що має ту ж кількість рядків і стовпців і елементи, які дорівнюють сумам відповідних елементів матриць А, В. Наприклад,

З цього визначення витікають співвідношення:
4. ![]()
5. ![]()
6. ![]()
7. ![]()
8. ![]()
Вводячи позначення ![]() , будемо також мати
, будемо також мати
![]() [4]
[4]
Добутком матриці ![]() , що має відповідно розмірність m х n, на матрицю
, що має відповідно розмірність m х n, на матрицю ![]() , що має відповідно розмірність n х p, називається матриця
, що має відповідно розмірність n х p, називається матриця ![]() , що має відповідно розмірність m х p,та елементи
, що має відповідно розмірність m х p,та елементи ![]() , які визначаються за формулою
, які визначаються за формулою

![]() (1)
(1)
Для позначення добутку матриці А на матрицю В використовують запис ![]() . Операція складання добутку матриці А на матрицю В називається перемноженням цих матриць.
. Операція складання добутку матриці А на матрицю В називається перемноженням цих матриць.
Зі сформульованого вище слідує, що матрицю А можна помножити не на будь-яку матрицю В: необхідно, щоб кількість стовпців матриці А дорівнювало кількості рядків матриці В.
Зокрема, два добутки ![]() можна визначити лише в тому випадку, коли кількість стовпців А співпадає з числом рядків В, а кількість рядків А співпадає з кількістю стовпців В. При цьому обидві матриці
можна визначити лише в тому випадку, коли кількість стовпців А співпадає з числом рядків В, а кількість рядків А співпадає з кількістю стовпців В. При цьому обидві матриці ![]() будуть квадратними, але порядки їх будуть різними. Для того щоб обидва добутки
будуть квадратними, але порядки їх будуть різними. Для того щоб обидва добутки ![]() не тільки були визначеними, але й мали однаковий порядок, необхідно і достатньо, щоб обидві матриці А і В були квадратними матрицями одного й того ж порядку.
не тільки були визначеними, але й мали однаковий порядок, необхідно і достатньо, щоб обидві матриці А і В були квадратними матрицями одного й того ж порядку.
Формула (1) являє собою правило складання елементів матриці С, що являє собою добуток матриці А на матрицю В. Це правило можна сформулювати і словесно: елемент ![]() , що стоїть на перетині і-го рядка та j-го стовпця матриці
, що стоїть на перетині і-го рядка та j-го стовпця матриці ![]() , дорівнює сумі попарних добутків відповідних елементів і-го рядка матриці А та j-го стовпця матриці В.
, дорівнює сумі попарних добутків відповідних елементів і-го рядка матриці А та j-го стовпця матриці В.
В якості приклада застосування вказаного правила приведемо формулу перемноження квадратних матриць другого порядку

З формули (1) витікають наступні властивості добутку матриці А на матрицю В:
1. ![]()
2. ![]() або
або ![]()
Серед квадратних матриць виділимо клас так званих діагональних матриць, у кожної з яких елементи, що розташовані не на головній діагоналі, дорівнюють нулю. Кожна діагональна матриця має вид
 ,
,
де ![]() — які завгодно числа. Легко бачити, що якщо всі ці числа рівні між собою, тобто
— які завгодно числа. Легко бачити, що якщо всі ці числа рівні між собою, тобто ![]() то для будь-якої квадратної матриці А порядку n справедлива рівність
то для будь-якої квадратної матриці А порядку n справедлива рівність ![]() .
.
Серед усіх діагональних матриць, у яких діагональні елементи співпадають ![]() особливу роль відіграють дві матриці. Перша з них отримується при d = 1, називається одиничною матрицею n-го порядку і позначається Е. Друга матриця отримується при d = 0, називається нульовою матрицею n-го порядку і позначається О.
особливу роль відіграють дві матриці. Перша з них отримується при d = 1, називається одиничною матрицею n-го порядку і позначається Е. Друга матриця отримується при d = 0, називається нульовою матрицею n-го порядку і позначається О.
Таким чином,

[2, стор. 14]
З правил дій над матрицями безпосередньо витікає, що сумма і добуток діагональних матриць буде знову діагональною матрицею:


Розглянемо тепер довільну квадратну матрицю Х порядка п з елементами з кільця К. За означенням вважаємо
![]()
Оскільки при множені декількох матриць дужки можна розташовувати довільно, то для будь-яких цілих невід’ємних p, q та довільної матриці Х над асоціативним кільцем К маємо
![]() , (2)
, (2)
![]() .
.
Матриці А і В називаються переставними (комутативними), якщо
![]()
Зі співвідношення (2) отримаємо
![]() ,
,
і, значить, всі натуральні степені однієї і тієї ж матриці переставні між собою.
Справедливе й більш загальне твердження: якщо матриці А і В переставні, то будь-які їх натуральні степені також переставні й для будь-якого натурального p маємо
![]()
Транспонування матриць.
Розглянемо довільну матрицю

Матриця

що отрималася з А заміною рядків стовпцями, називається транспонованою по відношенню до А.
Для довільних матриць А, В мають місце наступні правила транспонування:
![]() ,
,
![]()
де, α, β — довільні числа.
Якщо А — довільна квадратна матриця і
![]()
то А називається симетричною; якщо ж
![]()
то — кососиметричною. [4]
Поняття визначника. Розглянемо довільну квадратну матрицю будь-якого порядку n:

Визначник (або детермінант) визначається для довільної квадратної матриці А, і являє собою поліном від всіх її елементів. Позначається — або det(A), або — в розгорнутому вигляді

(матриця обмежується вертикальними лініями). Маючи на увазі порядок матриці А, про її визначник кажуть як про визначник порядку п.
Для п=1:
![]()
для п=2:

для п=3:

для п = 4 формула стає громіздкою.
Введемо тепер визначник довільного порядку п.
Впорядкована пара різних натуральних чисел (а,b) утворює інверсію (або порушення порядку), якщо ![]() . Будемо позначати число інверсій в парі (а,b) через
. Будемо позначати число інверсій в парі (а,b) через ![]() . Таким чином
. Таким чином

Число інверсій в послідовності різних натуральних чисел ![]() визначається наступним чином:
визначається наступним чином:
![]()
Визначником (або детермінантом) матриці

Називається

де сумма поширюється на всілякі перестановки ![]() елементів
елементів ![]() , Число п називається порядком визначника. В загальному випадку сума, що визначає детермінант порядку п, містить п! доданків, кожен з яких являє собою добуток п елементів визначника, взятих по одному з кожного рядка й з кожного стовпця (тобто після того, як в добуток вставляється елемент
, Число п називається порядком визначника. В загальному випадку сума, що визначає детермінант порядку п, містить п! доданків, кожен з яких являє собою добуток п елементів визначника, взятих по одному з кожного рядка й з кожного стовпця (тобто після того, як в добуток вставляється елемент ![]() більше в цей добуток не береться жодного елемента з j-го рядка та k-го стовпця). Знак в добутку визначається по вказаному вище правилу.
більше в цей добуток не береться жодного елемента з j-го рядка та k-го стовпця). Знак в добутку визначається по вказаному вище правилу.
1.2 Власні значення та власні вектори матриці
Якщо А — квадратна матриця п-го порядку і ![]() при
при ![]() , то число l називається власним значенням матриці, а ненульовий вектор х — відповідним йому власним вектором. Перепишемо задачу в такому вигляді
, то число l називається власним значенням матриці, а ненульовий вектор х — відповідним йому власним вектором. Перепишемо задачу в такому вигляді
![]() (1)
(1)
Для існування нетривіального розв’язку задачі (1) має виконуватися умова
![]() (2)
(2)
Цей визначник являє собою многочлен п-ї степені від l; його називають характеристичним многочленом. Значить, існує п власних значень — коренів цього многочлена, серед яких можуть бути однакові (кратні).
Якщо знайдено деяке власне значення, то, при підстановці його в однорідну систему (1), можна визначити відповідний власний вектор. Будемо нормувати власні вектори[1] . Тоді кожному простому (не кратному) власному значенню відповідає один (з точністю до напрямку) власний вектор, а сукупність всіх власних векторів, що відповідають сукупності простих власних значень, лінійно-незалежна. Таким чином, якщо всі власні значення матриці прості, то вона має п лінійно-незалежних власних векторів, які утворюють базис простору.
Кратному власному значенню кратності р може відповідати від 1 до р лінійно-незалежних власних векторів. Наприклад, розглянемо такі матриці четвертого порядку:
 (3)
(3)
В кожної з них характеристичне рівняння приймає вигляд ![]() , а отже, власне значення
, а отже, власне значення ![]() і має кратність р=4. Проте в першої матриці є чотири лінійно-незалежних власних вектора
і має кратність р=4. Проте в першої матриці є чотири лінійно-незалежних власних вектора
 (4)
(4)
У другої матриці є тільки один власний вектор е1 . Другу матрицю називають простою жордановою (або класичною) підматрицею. Третя матриця має так звану канонічну жорданову форму (по діагоналі стоять або числа, або жорданові підматриці, а інші елементи дорівнюють нулеві).
Таким чином, якщо серед власних значень матриці є кратні, то її власні вектори не завжди утворюють базис. Однак і в цьому випадку власні вектори, що відповідають різним власним значенням, являються лінійно-незалежними.[3, стор 156]
При розв’язуванні теоретичних і практичних задач часто виникає потреба визначити власні значення даної матриці А, тобто обчислити корені її вікового (характеристичного) рівняння
det(A - lE) = 0 (2)
а також знайти відповідні власні векторі матриці А. Друга задача є простішою, оскільки якщо корені характеристичного рівняння відомі, то знаходження власних векторів зводиться до відшукання ненульових розв’язків деяких однорідних лінійних систем. Тому ми в першу чергу будемо займатися першою задачею — відшуканням коренів характеристичного рівняння (2).
Тут в основному застосовуються два прийоми: 1) розгортання вікового визначника в поліном n-го степеня
D(l) = det(A - lE)
з подальшим розв’язком рівняння D(l) = 0 одним з відомих наближених, взагалі кажучи, способів (наприклад, методом Лобачевського-Греффе) наближене визначення коренів характеристичного рівняння (найчастіше найбільших по модулю) методом ітерації, без попереднього розгортання вікового визначника.
Розгортання вікового визначника.
Як відомо, віковим визначником матриці А = [aij ] називається визначник вигляду
D(l) = det(A - lE) =  (1)
(1)
Прирівнюючи цей визначник до нуля, одержуємо характеристичне рівняння
D(l) = 0
Якщо потрібно знайти все коріння характеристичного рівняння, то доцільно заздалегідь обчислити визначник (1).
Розгортаючи визначник (1), одержуємо поліном n-го степеня
![]() (2)
(2)
Де
є сума усіх діагональних мінорів першого порядку матриці А.

є сума всього діагонального мінору другого порядку матриці А;

— сума всіх діагональних мінорів третього порядку матриці А і т.д. Нарешті
sn = det A.
Легко переконатися, що число діагональних мінорів k-го порядку матриці А дорівнює
![]() (k = 1, 2, …, n ).
(k = 1, 2, …, n ).
Звідси одержуємо, що безпосереднє обчислення коефіцієнтів характеристичного полінома (2) еквівалентно обчисленню
![]()
визначників різних порядків. Остання задача, взагалі кажучи, технічно важко здійснена для скільки-небудь великих значень n. Тому створені спеціальні методи розгортання вікових визначників (методи А. Н. Крилова, А. М. Данілевського, Леверье, метод невизначених коефіцієнтів, метод інтерполяції та ін.).
Розділ ІІ. Знаходження власних векторів і власних значень матриць
Суть методу А. М. Данілевського [1] полягає в приведенні вікового визначника до так званого нормального виду Фробеніуса
 . (1)
. (1)
Якщо нам вдалося записати вікового визначника у формі (1), то, розкладаючи його по елементах першого рядка, матимемо:
![]()
Або
![]() . (2)
. (2)
Таким чином, розгортання вікового визначника, записаного в нормальній формі (1), не представляє труднощів. Позначимо через

дану матрицю, а через

— подібну їй матрицю Фробеніуса, тобто
![]() ,
,
де S - особлива матриця.
Оскільки подібні матриці володіють однаковими характеристичними поліномами, то маємо:
det(A-lE)= det(P-lE). (3)
Тому для обґрунтування методу досить показати, яким чином, виходячи з матриці А, будується матриця Р. Згідно методу А. М. Данілевського, перехід від матриці А до подібної їй матриці Р здійснюється за допомогою т - 1 перетворення подібності, що послідовно перетворюють рядки матриці А, починаючи з останньої, у відповідні рядки матриці Р.
Покажемо початок процесу. Нам необхідно рядок
![]()
перевести в рядок 0 0 ... 1 0. Припускаючи, що ![]() , розділимо всі елементи (n-1) - го стовпця матриці А на
, розділимо всі елементи (n-1) - го стовпця матриці А на ![]() . Тоді її n-й рядок прийме вигляд
. Тоді її n-й рядок прийме вигляд
![]() .
.
Потім віднімемо (n-1) - й стовпець перетвореної матриці, помножений відповідно на числа ![]() , зі всієї решти її стовпців.
, зі всієї решти її стовпців.
В результаті одержимо матрицю, останній рядок якої має бажаний вигляд 0 0 ... 1 0. Вказані операції є елементарними перетвореннями, що здійснюються над стовпцями матриці А. Виконавши ці ж перетворення над одиничною матрицею, одержимо матрицю

Де
![]() при і ≠ n - 1(4)
при і ≠ n - 1(4)
І
![]() .(4')
.(4')
Звідси робимо висновок, що проведені операції рівносильні множенню справа матриці ![]() на матрицю А, тобто після вказаних перетворень одержимо матрицю
на матрицю А, тобто після вказаних перетворень одержимо матрицю
 . (5)
. (5)
Використовуючи правило множення матриць, знаходимо, що елементи матриці В обчислюються за наступними формулами:
![]() (6)
(6)
![]() (6')
(6')
Проте побудована матриця ![]() не буде подібна матриці А. Для того щоб мати перетворення подібності, потрібно обернену матрицю
не буде подібна матриці А. Для того щоб мати перетворення подібності, потрібно обернену матрицю ![]() зліва помножити на матрицю В:
зліва помножити на матрицю В:
![]() .
.
Безпосередньою перевіркою легко переконатися, що обернена матриця ![]() має вигляд
має вигляд
 (7)
(7)
Нехай
![]()
Отже
![]() (8)
(8)
Оскільки, очевидно, множення зліва матриці ![]() на матрицю В не змінює перетвореного рядка останньої, то матриця C має вигляд
на матрицю В не змінює перетвореного рядка останньої, то матриця C має вигляд
 (9)
(9)
Перемножуючи матриці ![]() (7) і B (5), матимемо:
(7) і B (5), матимемо:
![]() (10)
(10)
І

![]() (10')
(10')
Таким чином, множення ![]() на матрицю В змінює лише (n - 1) -й рядок матриці В. Елементи цього рядка знаходяться за формулами (10) і (10'). Одержана матриця C подібна матриці А і має один зведений рядок. Цим закінчується перший етап процесу.
на матрицю В змінює лише (n - 1) -й рядок матриці В. Елементи цього рядка знаходяться за формулами (10) і (10'). Одержана матриця C подібна матриці А і має один зведений рядок. Цим закінчується перший етап процесу.
Далі, якщо ![]() , то над матрицею C можна повторити аналогічні операції, узявши за основу (n - 2) -й її рядок. В результаті одержимо матрицю
, то над матрицею C можна повторити аналогічні операції, узявши за основу (n - 2) -й її рядок. В результаті одержимо матрицю
![]()
з двома зведеними рядками. Над останньою матрицею проробляємо ті ж операції. Продовжуючи цей процес, ми, нарешті, одержимо матрицю Фробеніуса
![]()
якщо, звичайно, всі n - 1 проміжних перетворень можливі. Весь процес може бути оформлений в зручну обчислювальну схему, складання якої покажемо на наступному прикладі.
Приклад. Привести до вигляду Фробеніуса матрицю
 .
.
Розв’язання.
Обчислення розташовуємо в таблицю 1.
Номер рядка |
Рядки матриці | Σ | Σ’ | ||||
| 1 | 2 | 3 | 4 | ||||
1 2 3 4 |
1 2 3 4 |
2 1 2 3 |
3 2 1 2 |
4 3 2 1 |
10 8 8 10 |
||
| І | –2 | –1,5 | 0,5–1 | –0,5 | –5 | ||
5 6 7 8 |
4 3 2 1 |
–5 2 1 0 |
–2,5 –2 0,5 0 |
1,5 1 0,5 1 |
2,5 2 1,5 0 |
–3,5 –1 3,5 1 |
–5 –2 3 0 |
| 7’ | –24 | –15 | 11 | 19 | –9 | ||
| ІІ | –1,600 | –0,067 –1 |
0,733 | 1,267 | –0,600 | ||
| 9 | –24 | –1 | 0,167 | –0,333 | –0,667 | –1,833 | –2 |
| 10 | –15 | 1,2 | 0,133 | –0,467 | –0,533 | 0,333 | 0,2 |
| 11 | 11 | 0 | 1 | 0 | 0 | 1 | 0 |
| 12 | 19 | 0 | 0 | 1 | 0 | 1 | 1 |
| 10’ | 6 | 5 | 34 | 24 | 69 | ||
| ІІІ | 0,167–1 | –0,833 | –5,667 | –4,000 | –11,500 | ||
| 13 | 6 | –0,167 | 1 | 5,333 | 3,333 | 9,500 | 9,667 |
| 14 | 5 | 1 | 0 | 0 | 0 | 1 | 0 |
| 15 | 34 | 0 | 1 | 0 | 0 | 1 | 1 |
| 16 | 24 | 0 | 0 | 1 | 0 | 1 | 1 |
| 13’ | 4 | 40 | 56 | 20 | 120 | ||
У рядках 1-4 таблиці 1 розміщуємо елементи ![]() даної матриці і контрольні суми
даної матриці і контрольні суми  . Відзначаємо елемент
. Відзначаємо елемент ![]() , що належить третьому стовпцю (відмічений стовпець). У рядку 1 записуємо елементи третього рядка матриці
, що належить третьому стовпцю (відмічений стовпець). У рядку 1 записуємо елементи третього рядка матриці ![]() , що обчислюються за формулами (4) і (4'):
, що обчислюються за формулами (4) і (4'):




Сюди ж (рядок 1 таблиці 1) поміщаємо елемент

що одержується аналогічним прийомом з контрольного стовпця Σ. Число -5 повинно співпасти з сумою елементів рядка I, що не входять в контрольний стовпець (після заміни елементу ![]() на -1). Для зручності число -1 записуємо поряд з елементом
на -1). Для зручності число -1 записуємо поряд з елементом ![]() , відокремлюючи від останнього межею.
, відокремлюючи від останнього межею.
У рядках 5-8 в графі М-1 виписуємо третій рядок матриці М-1 , яка в силу формули (7) співпадає з четвертим рядком початкової матриці А. У рядках 5-8 у відповідних стовпцях виписуємо елементи матриці
B = АМ3 ,
що обчислюються за двочленними формулами (6) для невідмічених стовпців і по одночленній формулі (6') для відміченого стовпця. Наприклад, для першого стовпця маємо:

і т.д.
Перетворені елементи третього (відміченого) стовпця отримуються за допомогою множення початкових елементів на ![]() = 0,5. Наприклад,
= 0,5. Наприклад,

Відмітимо, що останній рядок матриці В повинен мати вигляд
0 0 1 0.
Для контролю поповнюємо матрицю В перетвореними по аналогічних двочленних формулах з ![]() відповідними елементами стовпця Σ. Наприклад,
відповідними елементами стовпця Σ. Наприклад,
![]()
![]()
![]()
![]()
Отримані результати записуємо в стовпці Σ' у відповідних рядках. Додавши до них елементи третього стовпця, одержимо контрольні суми

для рядків 5-8 (стовпець Σ).
Перетворення ![]() ,що проведене над матрицею і що дає матрицю
,що проведене над матрицею і що дає матрицю ![]() , змінює лише третій рядок матриці В, тобто сьомий рядок таблиці. Елементи цього перетвореного рядка 7' виходять по формулі (10), тобто є сумами парних добутків елементів стовпця
, змінює лише третій рядок матриці В, тобто сьомий рядок таблиці. Елементи цього перетвореного рядка 7' виходять по формулі (10), тобто є сумами парних добутків елементів стовпця ![]() , що знаходяться в рядках 5-8, на відповідні елементи кожного із стовпців матриці В. Наприклад
, що знаходяться в рядках 5-8, на відповідні елементи кожного із стовпців матриці В. Наприклад
![]()
і т. д.
Такі ж перетворення проводимо над стовпцем Σ:
![]()
В результаті одержуємо матрицю C, що складається з рядків 5, 6, 7', 8 з контрольними сумами Σ, причому матриця C подібна матриці А і має один зведений рядок 8. Цим закінчується побудова першого подібного перетворення ![]() .
.
Далі, прийнявши матрицю C за вихідну і виділивши елемент ![]() (другий стовпець), продовжуємо процес аналогічним чином. В результаті одержуємо матрицю
(другий стовпець), продовжуємо процес аналогічним чином. В результаті одержуємо матрицю ![]() , елементи якої розташовані в рядках 9, 10', 11, 12, що містить два зведені рядки. Нарешті, відправляючись від елементу
, елементи якої розташовані в рядках 9, 10', 11, 12, що містить два зведені рядки. Нарешті, відправляючись від елементу ![]() (перший стовпець) і перетворюючи матрицю D в подібну їй, одержуємо шукану матрицю Фробеніуса Р, елементи якої записані в рядках 13', 14, 15, 16. На кожному етапі процесу контроль здійснюється за допомогою стовпців Σ і Σ'.
(перший стовпець) і перетворюючи матрицю D в подібну їй, одержуємо шукану матрицю Фробеніуса Р, елементи якої записані в рядках 13', 14, 15, 16. На кожному етапі процесу контроль здійснюється за допомогою стовпців Σ і Σ'.
Таким чином, матриця Фробеніуса буде мати вигляд:

Звідси віковий визначник, приведений до нормального виду Фробеніуса, запишеться так:

або
![]() .
.
Виняткові випадки в методі А. М. Данілевського.
Процес А. М. Данілевського [1] відбувається без жодних ускладнень, якщо всі елементи, що виділяються, відмінні від нуля. Ми зупинимося зараз на виняткових випадках, коли ця вимога порушується.
Припустимо, що при перетворенні матриці А в матрицю Фробеніуса Р ми після декількох кроків пришли до матриці вигляду
 ,
,
причому виявилось, що ![]() .
.
Тоді продовжувати перетворення по методу А. М. Данілевського не можна. Тут можливі два випадки.
1. Нехай якийсь елемент матриці D, що стоїть ліворуч нульового елемента ![]() , відмінний від нуля, тобто
, відмінний від нуля, тобто ![]() , де
, де![]() . Тоді цей елемент висуваємо на місце нульового елементу
. Тоді цей елемент висуваємо на місце нульового елементу ![]() , тобто переставляємо (k-1) -й і k -й стовпці матриці D і одночасно переставляємо її (k-1) -й і l-й рядки. Можна довести, що одержана нова матриця D' буде подібна колишній. До нової матриці застосовуємо метод А.М.Данілевського.
, тобто переставляємо (k-1) -й і k -й стовпці матриці D і одночасно переставляємо її (k-1) -й і l-й рядки. Можна довести, що одержана нова матриця D' буде подібна колишній. До нової матриці застосовуємо метод А.М.Данілевського.
2. Нехай ![]() , тоді D має вигляд
, тоді D має вигляд

У такому разі віковий визначник det(D - lЕ) розпадається на два визначники
det (D - lЕ) = det (D1 - lЕ) det (D2 - lЕ).
При цьому матриця D2 вже приведена до канонічної форми Фробеніуса і тому det (D2 - lЕ) обчислюється відразу. Залишається застосувати метод А. М. Данілевського до матриці D1 .
Обчислення власних векторів по методу А. М. Данілевського.
Метод А. М. Данілевського [1] дає можливість визначати власні вектори даної матриці А, якщо відомі її власні значення. Неай l— власне значення матриці А, а отже, і власне значення подібної їй матриці Фробеніуса Р.
Знайдемо власний вектор ![]() матриці Р, відповідний даному значенню l: Ру = lу. Звідси (Р - lЕ) у = 0 або
матриці Р, відповідний даному значенню l: Ру = lу. Звідси (Р - lЕ) у = 0 або

![]()
![]()
![]()
Перемножуючи матриці, одержимо систему для визначення координат ![]() власного вектора у:
власного вектора у:
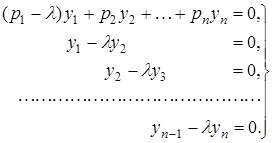 (1)
(1)
Система (1) — однорідна. З точністю до коефіцієнта пропорційності розв’язки її можуть бути знайдені таким чином. Покладемо yn =1. Тоді послідовно одержимо:
 (2)
(2)
Таким чином, шуканий власний вектор є
 .
.
Позначимо тепер через х власний вектор матриці А, що відповідає значенню l. Тоді, очевидно, маємо:
![]() .
.
Перетворення M1 , здійснене над y, дає:

Таким чином, перетворення М1 змінює лише першу координату вектора. Аналогічно перетворення М2 змінить лише другу координату вектора М1 у і т.д. Повторивши цей процес n-1 разів, одержимо шуканий власний вектор х матриці А.
Приведемо метод розгортання вікового визначника, що належить А. Н. Крилову [1] і заснований на істотно іншій ідеї, ніж метод А. М. Данілевського.
Нехай
![]() (1)
(1)
— характеристичний поліном (з точністю до знаку) матриці А. Згідно тотожності Гамільтона-Келі, матриця А обертає в нуль свій характеристичний поліном; тому
![]() . (2)
. (2)
Візьмемо тепер довільний ненульовий вектор
 .
.
Множачи обидві частини рівності (2) справа на ![]() , одержимо:
, одержимо:
![]() . (3)
. (3)
Покладемо:
![]() ; (4)
; (4)
тоді рівність (3) набуває вигляду
![]() (5)
(5)
або
 (5’)
(5’)
Де

Отже, векторна рівність (5) еквівалентна системі рівнянь
![]() (6)
(6)
з якої, взагалі кажучи, можна визначити невідомі коефіцієнти ![]() .
.
Оскільки на підставі формули (4)
![]() ,
,
то координати ![]() вектора
вектора ![]() послідовно обчислюються за формулами
послідовно обчислюються за формулами
 (7)
(7)
Таким чином, визначення коефіцієнтів pj характеристичного полінома (1) методом А. Н. Крилова зводиться до розв’язання лінійної системи рівнянь (6), коефіцієнти якої обчислюються за формулами (7), причому координати початкового вектора

довільні. Якщо система (6) має єдиний розв’язок, то її корені р1 , р2 . . ., рn є коефіцієнтами характеристичного полінома (1). Цей розв’язок може бути знайдено, наприклад, методом Гауса. Якщо система (6) не має єдиного розв’язку, то завдання ускладнюється. В цьому випадку рекомендується змінити початковий вектор.
Приклад. Методом А. Н. Крилова знайти характеристичний поліном матриці
Розв’язання. Виберемо початковий вектор

Користуючись формулами (7), визначимо координати векторів
![]() .
.
Маємо:



Складемо систему (6):

яка в нашому випадку має вигляд
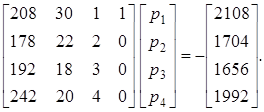
Звідси

Розв’язавши цю систему, одержимо:
![]() .
.
Отже
![]() ,
,
що співпадає з результатом, знайденим по методу А. М. Данілевського.
Обчислення власних векторів по методу А. Н. Крилова.
Метод А. Н. Крилова дає можливість просто знайти відповідні власні вектори [1].
Для простоти обмежимося випадком, коли характеристичний поліном
| (1) |
має різні корені ![]() . Припустимо, що коефіцієнти полінома (1) і його корені визначені. Потрібно знайти власні вектори
. Припустимо, що коефіцієнти полінома (1) і його корені визначені. Потрібно знайти власні вектори ![]() , що відповідають відповідно власним значенням
, що відповідають відповідно власним значенням ![]() .
.
Нехай ![]() — вектори, використані в методіА.Н. Крилова для знаходження коефіцієнтів
— вектори, використані в методіА.Н. Крилова для знаходження коефіцієнтів ![]() . Розкладаючи вектор y(0)
по власних векторах
. Розкладаючи вектор y(0)
по власних векторах![]() , матимемо:
, матимемо:
![]() (2)
(2)
де ![]() — деякі числові коефіцієнти. Звідси, враховуючи, що
— деякі числові коефіцієнти. Звідси, враховуючи, що

![]() ,
,
одержимо:
 (3)
(3)
Нехай
![]() (4)
(4)
![]() — довільна система поліномів. Складаючи лінійну комбінацію векторів
— довільна система поліномів. Складаючи лінійну комбінацію векторів ![]() з коефіцієнтами
з коефіцієнтами ![]() , в силу співвідношень (2) і (3) знаходимо:
, в силу співвідношень (2) і (3) знаходимо:
![]() .(5)
.(5)
Якщо покласти

![]() ,(6)
,(6)
то, очевидно
![]() при
при ![]()
І
![]()
Формула (5) при цьому приймає вигляд
![]() . (7)
. (7)
Таким чином, якщо ![]() , то одержана лінійна комбінація векторів
, то одержана лінійна комбінація векторів ![]() дає власний вектор х(і)
з точністю до числового множника.
дає власний вектор х(і)
з точністю до числового множника.
Коефіцієнти ![]() можуть бути легко визначені за схемою Горнера
можуть бути легко визначені за схемою Горнера
Цей метод [1] розкриття вікового визначника заснований на формулах Ньютона для сум степенів коренів алгебраїчного рівняння.
Нехай
![]() (1)
(1)
— характеристичний поліном даної матриці ![]() та
та ![]() — повна сукупність його коренів, де кожен корінь повторюється стільки разів, яка його кратність.
— повна сукупність його коренів, де кожен корінь повторюється стільки разів, яка його кратність.
Покладемо
![]()
![]() .
.
Тоді при ![]() справедливі формули Ньютона
справедливі формули Ньютона
![]()
![]() . (2)
. (2)
Звідси
 (3)
(3)
Якщо суми ![]() відомі, то за допомогою формул (3) можна крок за кроком визначити коефіцієнти
відомі, то за допомогою формул (3) можна крок за кроком визначити коефіцієнти ![]() характеристичного полінома (1).
характеристичного полінома (1).
Суми ![]() обчислюються таким чином: для
обчислюються таким чином: для ![]() маємо:
маємо:
![]()
Тобто
 (4)
(4)
Далі, як відомо, ![]() є власними значеннями матриці
є власними значеннями матриці![]() . Тому
. Тому
![]()
тобто якщо
![]()
то
 . (5)
. (5)
Степені ![]() знаходяться безпосереднім перемножуванням.
знаходяться безпосереднім перемножуванням.
Таким чином, схема розкриття вікового визначника по методу Леверрьє вельми проста, а саме: спочатку обчислюються ![]() — степені даної матриці А, потім знаходяться відповідні sk
- суми елементів головних діагоналей матриць
— степені даної матриці А, потім знаходяться відповідні sk
- суми елементів головних діагоналей матриць ![]() , нарешті, по формулах (3) визначаються шукані коефіцієнти
, нарешті, по формулах (3) визначаються шукані коефіцієнти ![]() .
.
Метод Леверрьє вельми трудомісткий, оскільки доводиться підраховувати високі степені даної матриці. Достоїнство його — нескладна схема обчислень і відсутність виняткових випадків.
Приклад. Методом Леверрьє розгорнути характеристичний визначник матриці

Розв’язання. Утворюємо степені ![]() матриці А. Маємо:
матриці А. Маємо:

Відмітимо, що не було необхідності обчислювати ![]() повністю, досить було знайти лише головні діагональні елементи цієї матриці.
повністю, досить було знайти лише головні діагональні елементи цієї матриці.
Звідси

Отже, по формулах (3) матимемо:

Таким чином, ми одержуємо вже відомий результат:

2.4 Метод невизначених коефіцієнтів
Розгортання вікового визначника можна також здійснити за допомогою знаходження досить великої кількості його числових значень.
Нехай
![]() (1)
(1)
є віковим визначником матриці А, тобто
![]() .
.
Якщо в рівності (1) послідовно покласти![]() , то для коефіцієнтів
, то для коефіцієнтів ![]() одержимо систему лінійних рівнянь
одержимо систему лінійних рівнянь
 (2)
(2)
Звідси
 (3)
(3)
І
![]()
З системи (3) можна визначити коефіцієнти ![]() характеристичного полінома (1).
характеристичного полінома (1).
Вводячи матрицю

і вектори
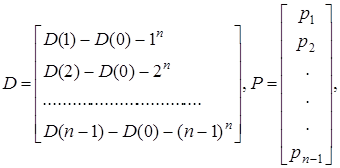
систему (3) можна записати у вигляді матричного рівняння
![]() (4)
(4)
звідси
![]() (5)
(5)
Відмітимо, що обернена матриця ![]() залежить тільки від порядку n вікового визначника і може бути знайдена наперед, якщо доводиться мати справу з масовим розкриттям вікових визначників одного і того ж порядку.
залежить тільки від порядку n вікового визначника і може бути знайдена наперед, якщо доводиться мати справу з масовим розкриттям вікових визначників одного і того ж порядку.
Таким чином, застосування цього методу зводиться до обчислення числових визначників
![]()
![]()
і знаходження розв’язку стандартної лінійної системи (4).
2.5 Метод скалярних добутків для знаходження першого власного значення дійсної матриці
Для відшукання першого власного значення ![]() дійсної матриці А можна вказати дещо інший ітераційний процес, що є іноді вигіднішим. Метод [1] заснований на утворенні скалярних добутків
дійсної матриці А можна вказати дещо інший ітераційний процес, що є іноді вигіднішим. Метод [1] заснований на утворенні скалярних добутків
![]() і
і ![]()
![]() де А' — матриця, транспонована з матрицею А, і у0
— вибраний яким-небудь чином початковий вектор.
де А' — матриця, транспонована з матрицею А, і у0
— вибраний яким-небудь чином початковий вектор.
Переходимо тепер до викладу самого методу.
Нехай А — дійсна матриця і ![]() — її власні значення, які передбачаються різними, причому
— її власні значення, які передбачаються різними, причому
![]()
Візьмемо деякий ненульовий вектор у0 і за допомогою матриці А побудуємо послідовність ітерацій
| (1) |
Для вектора у0 утворюємо також за допомогою транспонованої матриці А' другу послідовність ітерацій
| (2) |
де ![]() .
.
Згідно з теоремою 1 розділу X § 16 в просторі Еп
виберемо два власні базиси ![]() і
і ![]() відповідно для матриць А і А', що задовольняють умовам біортонормування:
відповідно для матриць А і А', що задовольняють умовам біортонормування:
| (3) |
де ![]() і
і ![]() . Позначимо координати вектора у0
в базисі
. Позначимо координати вектора у0
в базисі ![]() через
через ![]() , а в базисі
, а в базисі ![]() — через
— через ![]() тобто
тобто
![]() і
і ![]()
Звідси
 |
(4) |
І
 |
( |
Складемо скалярний добуток

Звідси через умову ортонормування знаходимо:
 |
(5) |
Аналогічно
| (6) |
Отже, при ![]() маємо:
маємо:

Таким чином,
 |
(7) |
Цей метод особливо зручний для симетричної матриці А, оскільки тоді А'=А, і ми маємо просто
 |
(8) |
і, отже, тут потрібно побудувати тільки одну послідовність ![]() .
.
Приклад. Методом скалярних добутків знайти найбільше власне значення матриці

Розв’язання. Оскільки матриця А — симетрична, то досить побудувати лише одну послідовність ітерацій ![]() .
.
Вибираючи за початковий вектор

можна використати результати таблиці 27. Наприклад, при k = 5 і k = 6 маємо:
 і
і 
![]()
Звідси
![]()
І![]()
Отже,

що співпадає в написаних знаках із значенням, знайденим раніше за допомогою А10 у0 .
Зауваження. Методи знаходження найбільшого по модулю кореня характеристичного рівняння можна використовувати для знаходження найбільшого по модулю кореня алгебраїчного рівняння
| (9) |
Дійсно, рівняння (9), як легко безпосередньо перевірити, є віковим для матриці

тобто рівняння (9) еквівалентно рівнянню
![]()
Якщо рівняння (9) не має нульового кореня, то аналогічним способом може бути визначений найменший по модулю корінь цього рівняння, а саме, при ![]() ,вважаючи
,вважаючи ![]() , одержимо:
, одержимо:
 |
(10) |
Зворотна величина найбільшого по модулю кореня рівняння (10), очевидно, дасть нам найменший по модулю корінь рівняння (9).
Знаходження другого власного значення матриці і другого власного вектора.
Нехай власні значення ![]() матриці А такі, що
матриці А такі, що
| (1) |
тобто є два відмінних один від одного, найбільших по модулю власних значення ![]() і
і ![]() матриці А. У такому разі прийомом, аналогічним розібраному вище (§ 11), можна приблизно знайти друге власне значення
матриці А. У такому разі прийомом, аналогічним розібраному вище (§ 11), можна приблизно знайти друге власне значення ![]() і власний вектор
і власний вектор ![]() , що відповідає йому.
, що відповідає йому.
З формули (2) маємо:
| (2) |
І
| (3) |
Виключимо з формул (2) і (3) члени, що містять ![]() . Для цього від рівності (3) віднімемо рівність (2), помножену на
. Для цього від рівності (3) віднімемо рівність (2), помножену на ![]() . В результаті одержимо:
. В результаті одержимо:
| (4) |
Введемо позначення
| (5) |
причому вираз (5) називатимемо ![]() - різницею від
- різницею від ![]() . Якщо
. Якщо ![]() , то очевидно, що перший доданок в правій частині рівності (4) є її головним членом при
, то очевидно, що перший доданок в правій частині рівності (4) є її головним членом при ![]() , і ми маємо наближену рівність
, і ми маємо наближену рівність
| (6) |
Звідси
| (7) |
Нехай
З формул (6) і (7) виводимо:
 |
(8) |
Користуючись формулою (8), можна приблизно обчислити друге власне значення ![]() . Відмітимо, що на практиці зважаючи на втрату точності при відніманні близьких чисел іноді вигідніше номер ітерації k для визначення
. Відмітимо, що на практиці зважаючи на втрату точності при відніманні близьких чисел іноді вигідніше номер ітерації k для визначення ![]() брати меншим, ніж номер ітерації т для визначення
брати меншим, ніж номер ітерації т для визначення ![]() , тобто доцільно вважати:
, тобто доцільно вважати:
 |
(9) |
де k- найменше з чисел, при якому починає позначатися переважання ![]() над наступними власними значеннями. Формула (9), взагалі кажучи, дає грубі значення для
над наступними власними значеннями. Формула (9), взагалі кажучи, дає грубі значення для ![]() . Відмітимо, що якщо модулі всіх власних значень різні між собою, то за допомогою формул, аналогічних формулі (9), можна обчислити і решту власних значень даної матриці. Проте результати обчислень будуть ще менш надійні.
. Відмітимо, що якщо модулі всіх власних значень різні між собою, то за допомогою формул, аналогічних формулі (9), можна обчислити і решту власних значень даної матриці. Проте результати обчислень будуть ще менш надійні.
Що стосується власного вектора ![]() , те, як витікає з формули (6), можна покласти:
, те, як витікає з формули (6), можна покласти:
| (10) |
Є розповсюдження даного методу на випадок кратного кореня характеристичного рівняння.
Приклад. Визначити подальші власні значення і власні вектори матриці

Розв’язання. Для знаходження другого власного значення приймемо k = 8. Маємо:
45433 21141 6 201 |
202833 93906 27 342 |
905238 417987 121 248 |
Складаємо ![]() - різниці по формулі
- різниці по формулі
![]()
де ![]() . Для кожного із стовпців приймається своє значення
. Для кожного із стовпців приймається своє значення ![]() а саме:
а саме: ![]() = 4,462;
= 4,462; ![]() = 4,456;
= 4,456; ![]() = 4,447 (таблиця 2).
= 4,447 (таблиця 2).
Таблиця 2
Обчислення другого власного значення
202833 93906 27 342 |
202722 94204 27 76 |
111 – 298 – 234 |
905238 417987 121 248 |
905041 418445 121 590 |
197 – 458 – 342 |
Звідси одержуємо:

Отже, приблизно можна прийняти:
![]()
В якості другого власного вектора можна прийняти:

Нормуючи цей вектор, одержимо:

Оскільки матриця А — симетрична, то вектори ![]() і
і ![]() повинні бути ортогональні між собою. Перевірка дає:
повинні бути ортогональні між собою. Перевірка дає:
![]()
Звідси ![]() , що досить неточно.
, що досить неточно.
Третє власне значення ![]() знаходимо по сліду матриці А:
знаходимо по сліду матриці А:
![]()
Звідси
![]() .
.
Власний вектор

можна обчислити з умов ортогональності:

Звідси

Або

Після нормування остаточно отримаємо:

2.6 п риклади задач, що зводяться до відшукання власних значень та власних векторів матриці
Задача 1

Дослідимо тривісне напруження стану елемента тіла, представленого на малюнку. Матриця напруги для нього має вигляд

Якщо виходити з того, що руйнування станеться при максимальній напрузі, то необхідно знати величину найбільшого головного напруження яке відповідає найбільшому власному значенню матриці напруги. Для знаходження цієї напруги скористаємося одним методом ітерацій. Одержимо власне значення ![]() і такий власний вектор
і такий власний вектор ![]()
Задача 2. [12, стор. 70]Для довільного тривимірного твердого тіла можна ввести три моменти інерції відносно трьох взаємно перпендикулярних осей і три змішані моменти інерції відносно трьох координатних площин. Відомо, що для несиметричного тіла при фіксованому початку координат існує єдина орієнтація координатних осей, при якій змішані моменти інерції обертаються в нуль. Такі осі називаються головними осями інерції, а відповідні моменти інерції - головними моментами інерції, серед яких є найбільший, найменший і такий, що має проміжне значення. Для матриці моментів інерції

знайти три головних моменти інерції.
Задача 3. [12, стор. 70]Баржа призначена для перевезення через озеро Ері зчепки з шести залізничних вагонів. Буксир тягне її за носову частину, як показано на малюнку. Значення мас вагонів і коефіцієнтів жорсткості сполучних елементів вказані під малюнком. Існує побоювання, що в зчепленні вагонів при хвилюванні на озері можуть виникнути резонансні продольні коливання. Обчислити шість власних частот даної механічної системи і порівняти їх з частотою хвилі, рівній 1 рад/с. Власні частоти пов'язані з власними значеннями динамічної матриці D співвідношенням

Динамічна матриця утворюється із матриць жорсткості [К] і мас [M]
![]() .
.


Задача 4. [12, стор. 71] Консольний брус довжиною 10 м, що має згинну жорсткість ![]() і погону масу 10 кг/м, апроксимується двома точковими масами по 50 кг кожна, що розташовані в центрі та на вільному кінці бруса.
і погону масу 10 кг/м, апроксимується двома точковими масами по 50 кг кожна, що розташовані в центрі та на вільному кінці бруса.

Потрібно знайти дві основні частоти коливань бруса. Це можна зробити, знаючи власні значення ![]() динамічної матриці
динамічної матриці ![]() та маючи на увазі, що
та маючи на увазі, що
.
![]() — діагональна матриця, на діагоналі якої стоять маси точок;
— діагональна матриця, на діагоналі якої стоять маси точок;
![]() — матриця згину, в якій елементи і-го рядка являють собою відхилення точки j під дією одиничної сили, що прикладена до точки і. Осьова сила відсутня. Деформаціями здвигу можна знехтувати.
— матриця згину, в якій елементи і-го рядка являють собою відхилення точки j під дією одиничної сили, що прикладена до точки і. Осьова сила відсутня. Деформаціями здвигу можна знехтувати.
У першому розділі курсової роботи проаналізовано науково-методичну літературу з теми дослідження.
Вивчення даної теми ми почали з розкриття дуже важливого для нашого дослідження поняття "матриця".
Ми розглянули основні відомості про матриці та визначники, висвітлили означення власних значень та власних векторів матриць.
В другому розділі ми розглянули теоретичні основи таких методів:
1) метод А. М. Данілевського;
2) метод А. Н. Крилова;
3) метод Леверрьє;
4) метод невизначених коефіцієнтів;
5) метод скалярних добутків для знаходження першого власного значення дійсної матриці.
Наведені приклади задач з фізики, що зводяться до відшукання власних значень та власних векторів матриці.
Дана робота має практичне застосування, її матеріал може бути використаний на факультативних заняттях з лінійної алгебри для формування наукового світогляду та математичної культури студентів.
1. Демидович Б. П., Марон И. А. Основы вычислительной математики. — 3-е изд. — М.: Наука, 1966. — 560 с.
2. Ильин В. А., Позняк Э. Г. Линейная алгебра: Учеб. Для вузов — 4-е изд. — М.: Наука. Физматлит, 1999. — 296 с.
3. Калиткин Н. Н. Численные методы. — М.: Мир, 1988. — 512 с.
4. Мальцев А. И. Основы линейной алгебры. — 3-е изд. — М.: Наука, 1968. — 402 с.
5. Марчук Г. И. Методы вычислительной математики — М.: Наука, 1977. — 392с., ил.
6. Приближение функций, дифференциальные и интегральные уравнения/Под ред. Б. П. Демидовича. — М.: Наука, 1987. — 368 с.
7. Фаддеев Д. К., Фаддеева В. Н. Вычислительные методы линейной алгебры. — М.: Физматгиз, 1963. — 408 с.
8. Фокс А., Пратт М. Вычислительная геометрия. Применение в проектировании и на производстве: Пер. с англ. — М.: Мир, 1982. — 304 с., ил.
9. Форсайт Дж., Молер К. Численное решение систем линейных уравнений. — М.: Мир, 1969. — 285 с.
10. Форсайт Дж., Малькольм М., Моулер К. Машинные методы математических вычислений: Пер. с англ. — М.: Мир, 1980. — 277 с., ил.
11. Хемминг Р. В. Цыфровые фильтры: Пер. с англ./Под ред. А. М. Трахтмана — М.: Советское радио, 1980. — 224 с., ил.
12. Шуп Т. Решение инженерных задач на ЭВМ: Практическое руководство. Пер. с англ. — М.: Мир, 1982. — 238с., ил.
[1]
Нормуванням (на одиницю) вектора х
називають множення його на ![]() ; нормований вектор має одиничну довжину.
; нормований вектор має одиничну довжину.