| Скачать .docx | Скачать .pdf |
Реферат: Средства визуализации изображений в компьютерной томографии и цифровых рентгенографических системах
Министерство образования Российской Федерации.
Владимирский Государственный Университет.
Кафедра БМИ.
РЕФЕРАТ
на тему:
«Средства визуализации изображений в компьютерной томографии и
цифровых рентгенографических системах».
по дисциплине: Компьютерные технологии.
|
Владимир 2002
СОДЕРЖАНИЕ

1. ВВЕДЕНИЕ.
Древняя латинская поговорка гласит: «Diagnosis cetra - ullae therapiae fundamentum» («Достоверный диагноз - основа любого лечения»). На протяжении многих веков усилия врачей были направлены на решение труднейшей задачи - улучшение распознавания заболеваний человека.
Потребность в методе, который позволил бы заглянуть внутрь человеческого тела, не повреждая его, была огромной, хотя и не всегда осознанной. Ведь все сведения, касающиеся нормальной и патологической анатомии человека, были основаны только на изучении трупов. После того, как в Европе стали широко изучаться вскрытия трупов, врачи смогли изучить строение органов человека, а также изменения, которые они претерпевают при тех или иных заболеваниях.
Какую огромную пользу принес бы непосредственный осмотр человеческого организма, если бы он стал вдруг «прозрачным »! И вряд ли кто-нибудь из ученых прошлого мог предположить, что эта мечта вполне осуществима.
Потребность увидеть не оболочку, а структуру организма живого человека, его анатомию и физиологию была столь насущной, что, когда чудесные лучи, позволявшие осуществить это на практике, были наконец открыты, обычно консервативные и часто недоверчивые к новшествам врачи почти сразу поняли, что в медицине наступила новая эра.
Уже в первые дни и недели после того, как стало известно о существовании и свойствах этих лучей, врачи различных стран начали применять их для исследования важнейших органов и систем человеческого тела. В течение первого же года появились сотни научных сообщений в печати, посвященных результатам таких исследований.
Количество сообщений в последующие годы нарастало. Выяснялись все новые возможности рентгенологического метода. Появились первые книги, посвященные этому методу. Вскоре эта литература стала необозримой.
В 1946 г. известный советский клиницист и организатор здравоохранения Н. Н. Приоров на заседании, посвященном 50-летию рентгенологии, говорил: «Что стало бы сегодня с физиатрией и урологией, гинекологией и отоларингологией, неврологией и онкологией, хирургией и ортопедией, офтальмологией и травматологией, если бы лишить их того, что дала рентгенология в области диагностики и лечения? »
Но процесс науки и техники неудержим. Не успели врачи полностью освоить возможности рентгеновских лучей в диагностике, как появились другие методы, позволяющие получить изображение внутренних органов человека, дополняющие данные рентгенологического исследования. К ним относятся радионуклидное и ультразвуковое исследования (УЗИ), тепловидение, ядерно-магнитный резонанс (ЯМР), фотонная эмиссия и некоторые другие методы, еще не получившие широкого распространения.
Эти способы основаны на использовании близких по своей природе волновых колебаний, для проникновения которых ткани человеческого тела не являются непреодолимым препятствием. Они объединяются и тем, что в результате взаимодействия волновых колебаний с органами и тканями организма на различных приемниках - экране, пленке, бумаге и др. - возникают их изображения, расшифровка которых позволяет судить о состоянии различных анатомических образований.
Такими образом, все указанные методы принципиально близки рентгенодиагностике как по своей природе, так и по характеру конечного результата их применения.
Внедрение в практику этих методов (наряду с рентгенологией) привело к возникновению новой обширной медицинской дисциплины, получившей за рубежом название диагностической радиологии (от латинского radius - луч), а у нас - лучевой диагностики.
Возможности этой дисциплины в распознавании заболеваний человека весьма велики. Ей доступны практически все органы и системы человека, все анатомические образования, размеры которых выше микроскопических.
В отличие от классических медицинских методик (пальпации, перкуссии, аускультации) основным анализатором информации, получаемой способами лучевой диагностики, является орган зрения, при помощи которого мы получаем около 90% сведений об окружающем мире, и притом наиболее достоверных. Когда широкая сеть медицинских учреждений будет оснащена высококачественной аппаратурой, позволяющей использовать все возможности лучевой диагностики, а врачи, работающие в этих учреждениях, будут обучены обращению с этой сложной аппаратурой и, главное, полноценной расшифровке получаемых с ее помощью изображений, диагностика основных заболеваний человека станет более ранней и достоверной не только в крупных научно-исследовательских и клинических центрах, но и на передовом крае нашего здравоохранения - в поликлиниках и районных больницах. В этих учреждениях работает основная масса врачей. Именно сюда обращается подавляющее большинство больных при возникновении каких-либо тревожных симптомов. От уровня работы именно этих лечебно-диагностических учреждений в конечном итоге зависит ранняя и своевременная диагностика, а следовательно во многом и результаты лечения подавляющего большинства болезней. [ № 1, стр. 3-6]
1.1. Развитие компьютерной томографии.
Изобретение рентгеновской томографии с обработкой получаемой информации на ЭВМ произвело переворот в области получения изображения в медицине. Впервые сообщил о новом методе инженер G.Hounsfield (1972). Аппарат, изготовленный и опробованный группой инженеров английской фирмы «EMI », получил название ЭМИ-сканера. Его применяли только для исследования головного мозга.
G.Hounsfield в своем аппарате использовал кристаллический детектор с фотоэлектронным умножителем (ФЭУ), однако источником была трубка, жестко связанная с детектором, которая делала сначала поступательное, а затем вращательное (1˚) движение при постоянном включении рентгеновского излучения. Такое устройство томографа позволяло получить томограмму за 4-20 мин.
Рентгеновские томографы с подобным устройством (I поколение ) применялись только для исследования головного мозга. Это объяснялось как большим временем исследования (визуализации только неподвижных объектов), так и малым диаметром зоны томографирования до (24 см). Однако получаемое изображение несло большое количество дополнительной диагностической информации, что послужило толчком не только к клиническому применению новой методики, но и к дальнейшему совершенствованию самой аппаратуры.
Вторым этапом в становлении нового метода исследования был выпуск к 1974 г. компьютерных томографов, содержащих несколько детекторов. После поступательного движения, которое производилось быстрее, чем у аппаратовI поколения , трубка с детекторами делала поворот на 3-10˚, что способствовало ускорению исследования, уменьшению лучевой нагрузки на пациента и улучшению качества изображения. Однако время получения одной томограммы (20-60 с) значительно ограничивало применение томографов II поколения для исследования всего тела ввиду неизбежных артефактов, появляющихся из-за произвольных и непроизвольных движений. Аксиальные компьютерные рентгеновские томографы данной генерации нашли широкое применение для исследования головного мозга в неврологических и нейрохирургических клиниках.
Получение качественного изображения среза тела человека на любом уровне стало возможным после разработки в 1976-1977 гг. компьютерных томографов III поколения . Принципиальное отличие их заключалось в том,что было исключено поступательное движение системы трубка-детекторы, увеличены диаметр зоны исследования до 50-70 см и первичная матрица компьютера (фирмы «Дженерал Электрик», «Пикер», «Сименс», «Тошиба», «ЦЖР» ). Это привело к тому, что одну томограмму стало возможным получить за 3-5 с при обороте системы трубка-детекторы на 360˚. Качество изображения значительно улучшилось и стало возможным обследование внутренних органов.
С 1979 г. некоторые ведущие фирмы начали выпускать компьютерные томографы IV поколения . Детекторы (1100-1200 шт.) в этих аппаратах расположены по кольцу и не вращаются. Движется только рентгеновская трубка, что позволяет уменьшить время получения томограммы до 1-1,5 с при повороте трубки на 360˚. Это, а также сбор информации под разными углами увеличивает объем получаемых сведений при уменьшении затрат времени на томограмму.
В 1986 г. произошел качественный скачок в аппаратостроении для рентгеновской компьютерной томографии. Фирмой «Иматрон» выпущен компь-ютерный томограф V поколения , работающий в реальном масштабе времени. В 1988 г. компьютерный томограф «Иматрон» куплен фирмой «Пикер» (США) и теперь он называется «Фастрек» .
Учитывая заинтересованность клиник в приобретении компьютерных томографов, с 1986 г. определилось направление по выпуску «дешевых » компактных систем для поликлиник и небольших больниц (М250, «Меди- тек»; 2000Т, «Шимадзу»; СТ МАХ, «Дженерал Электрик» ). Обладая некоторыми ограничениями, связанными с числом детекторов или временем и объемом собираемой информации, эти аппараты позволяют выполнять 75-95% (в зависимости от вида органа) исследований, доступных «большим » компьютерным томографам. [№ 2, стр. 8-10]
2. ФИЗИЧЕСКИЕ И ТЕХНИЧЕСКИЕ ОСНОВЫ ТОМОГРАФИИ
2.1.Принципы образования послойного изображения.
При выполнении обычной рентгенограммы три компонента - пленка, объект и рентгеновская трубка - остаются в покое. Томографический эффект можно получить при следующих комбинациях: 1) неподвижный объект и движущиеся источник (рентгеновская трубка) и приемник (рентгенографическая пленка, селеновая пластина, кристаллический детектор и т.п.) излучения; 2) неподвижный источник излучения и движущиеся объект и приемник излучения; 3) неподвижный приемник излучения и движущиеся объект и источник излучения. Наиболее распространены томографы с синхронным перемещением трубки и пленки в противоположных направлениях при
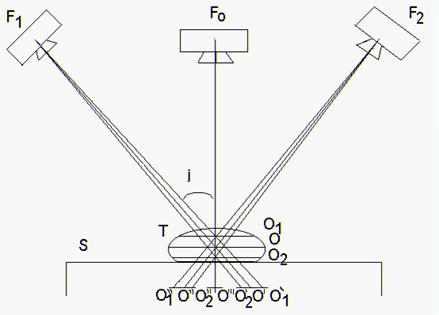
Рис.1 Принцип образования послойного изображения.
F0, F1, F2 -нулевое,исходное и конечное положение фокуса рентгеновской трубки; j -1/2 угла поворота трубки; S -поверхность стола; Т -объект исследования; О -точка выделяемого слоя; О 1 , О 2 -точки, находящиеся выше и ниже выделяемого слоя; О`, О`` -проекции точки О на пленке при исходном и конечном положениях фокуса рентгеновской трубки; О 1 `, O 1 `` -проекции точки О 1 на пленке при тех же положениях фокуса трубки; О 2 `, О 2 `` -проекции точки О 2 при тех же положениях фокуса трубки; О``` -проекции всех точек на пленке при нулевом положении рентгеновской трубки.
неподвижном объекте исследования. Рентгеновский излучатель и кассето-держатель с приемником излучения (рентгеновская пленка, селеновая пластина) соединяют жестко с помощью металлического рычага. Ось вращения рычага (перемещения трубки и пленки) находится над уровнем стола и ее можно произвольно перемещать.
Как показано на рис.1, при перемещении трубки из положения F1 в положение F2, проекция точки О, которая соответствует оси вращения рычага, будет постоянно находиться в одном и том же месте пленки. Проекция точки О неподвижна относительно пленки и, следовательно, ее изображение будет четким. Проекции точек О1 и О2,находящиеся вне выделяемого слоя, с перемещением трубки и пленки меняют свое положение на пленке и, следовательно, их изображение будет нечетким, размазанным. Доказано, что геометрическим местом точек, проекции которых при движении системы неподвижны относительно пленки, является плоскость, параллельная плоскости пленки и проходящая через ось окончания системы. На томограмме, таким образом, будут четкими изображения всех точек, находящихся в плоскости на уровне оси вращения системы, то есть в выделяемом томографическом слое.
На рисунке показано перемещение трубки и пленки по траектории прямая-прямая, то есть по параллельным прямолинейным направляющим. Такие томографы, имеющие самую простую конструкцию, получили наибольшее распространение. В томографах с траекториями дуга-дуга, дуга-прямая геометрическим местом точек, проекции которых при движении системы неподвижны относительно пленки, является плоскость, параллельные плос-кости пленки и проходящая через ось качания системы; выделяется слой также плоской формы. Из-за более сложной конструкции эти томографы получили меньшее распространение.
Описанные выше аппараты относятся к линейным томографам (с линейными траекториями), так как проекции траекторий движения системы трубка-пленка на выделяемую плоскость имеют вид прямой линии, а тени размазывания имеют прямолинейную форму.
За угол поворота (качания) трубки 2j в таких томографах принимают угол ее поворота из одного крайнего положения в другое; перемещение трубки от нулевого положения равно j.
В томографах с нелинейным размазыванием перемещение системы трубка - пленка происходит по криволинейным траекториям - кругу, эллипсу, гипоциклоиде, спирали. При этом отношение расстояний фокус трубки - центр вращения и центр вращения - пленка сохраняется постоянным. И в этих случаях доказано, что геометрическим местом точек, проекции которых при движении системы неподвижны относительно пленки, является плоскость, параллельная плоскости пленки и проходящая через ось качания системы. Размазывание изображения точек объекта, лежащих вне выделяемой плоскости, происходит по соответствующим кривым траекториям движения системы. Размазываемые изображения повторяют на пленке траекторию перемещения фокуса рентгеновской трубки.
При симультанной (многослойной) томографии в один прием (одно перемещение трубки и пленки в противоположных направлениях) получают несколько томограмм благодаря расположению в одной кассете нескольких пленок, расположенных на некотором расстоянии друг от друга. Проекция изображения первого слоя, находящегося на оси вращения системы (избранной высоте слоя), получается на верхней пленке. Геометрически доказано, что на последующих пленках получают свое изображение нижележащие параллельные к оси движения системы слои, расстояния между которыми примерно равны расстояниям между пленками. Основным недостатком продольной томографии является то, что расплывчатые изображения выше- и нижележащих плоскостей с нежелательной информацией уменьшают естественную контрастность. Вследствии этого восприятие в выделяемом слое тканей с невысокой контрастностью ухудшается.
Указанного недостатка лишена аксиальная компьютерная рентгеновская томография. Это объясняется тем, что строго коллимированный пучок рентгеновского излучения проходит только через ту плоскость, которая интересует врача. При этом регистрация рассеянного излучения сведена к минимуму, что значительно улучшает визуализацию тканей, особенно мало контрастных. Снижение регистрации рассеянного излучения при компьютерной томографии осуществляется коллиматорами, один из которых расположен на выходе рентгеновского пучка из трубки, другой - перед сборкой детекторов.
Известно, что при одинаковой энергии рентгеновского излучения материал с большей относительной молекулярной массой будет поглощать рентгеновское излучение в большей степени, чем вещество с меньшей относительной молекулярной массой. Подобное ослабление рентгеновского пучка может быть легко зафиксировано. Однако на практике мы имеем дело с совершенно неоднородным объектом - телом человека. Поэтому часто случается, что детекторы фиксируют несколько рентгеновских пучков одинаковой интенсивности в то время, как они прошли через совершенно различные среды. Это наблюдается, например, при прохождении через однородный объект достаточной протяженности и неоднородный объект с такой же суммарной плотностью.
При продольной томографии разницу между плотностью отдельных участков определить невозможно, поскольку «тени » участков накладываются друг на друга. С помощью компьютерной томографии решена и эта задача, так как при вращении рентгеновской трубки вокруг тела пациента детекторы регистрируют 1,5 - 6 млн сигналов из различных точек (проекций) и, что особенно важно, каждая точка многократно проецируется на различные окружающие точки.
При регистрации ослабленного рентгеновского излучения на каждом детекторе возбуждается ток, соответствующий величине излучения, попадающего на детектор. В системе сбора данных ток от каждого детектора (500-2400 шт.) преобразуется в цифровой сигнал и после усиления подается в ЭВМ для обработки и хранения. Только после этого начинается собственно процесс восстановления изображения.
Восстановление изображения среза по сумме собранных проекций является чрезвычайно сложным процессом, и конечный результат представляет собой некую матрицу с относительными числами, соответствующую уровню поглощения каждой точки в отдельности.
В компьютерных томографах применяются матрицы первичного изображения 256х256, 320х320, 512х512 и 1024х1024 элементов. Качество изображения растет при увеличении числа детекторов, увеличении количества регистрируемых проекций за один оборот трубки и при увеличении первичной матрицы. Увеличение количества регистрируемых проекций ведет к повышению лучевой нагрузки, применение большей первичной матрицы - к увеличению времени обработки среза или необходимости устанавливать дополнительные специальные процессоры видеоизображения. [№ 2, стр. 10-13]
2.2. Получение компьютерной томограммы.
Получение компьютерной томограммы (среза) головы на выбранном уровне основывается на выполнении следующих операций: 1) формирование требуемой ширины рентгеновского луча (коллимирование); 2) сканирование головы пучком рентгеновского излучения, осуществляемого движением (вращательным и поступательным) вокруг неподвижной головы пациента устройства «излучатель - детекторы »; 3) измерение излучения и определение его ослабления с последующим преобразованием результатов в цифровую форму; 4) машинный (компьютерный) синтез томограммы по совокупности данных измерения, относящихся к выбранному слою; 5) построение изображения исследуемого слоя на экране видеомонитора (дисплея).
В системах компьютерных томографов сканирование и получение изображения происходят следующим образом. Рентгеновская трубка в режиме излучения «обходит » голову по дуге 240˚, останавливаясь через каждые 3˚ этой дуги и делая продольное перемещение. На одной оси с рентгеновским излучателем закреплены детекторы - кристаллы йодистого натрия, преобразующие ионизирующее излучение в световое. Последнее попадает на фотоэлектронные умножители, превращающие эту видимую часть в электрические сигналы. Электрические сигналы подвергаются усилению, а затем преобразованию в цифры, которые вводят в ЭВМ. Рентгеновский луч, пройдя через среду поглощения, ослабляется пропорционально плотности тканей, встречающихся на его пути, и несет информацию о степени его ослабления в каждом положении сканирования. Интенсивность излучения во всех проекциях сравнивается с величиной сигнала, поступающего с контрольного детектора, регистрирующего исходную энергию излучения сразу же на выходе луча из рентгеновской трубки.
Следовательно, формирование показателей поглощения (ослабления) для каждой точки исследуемого слоя происходит после вычисления отношения величины сигнала на выходе рентгеновского излучателя к значению его после прохождения объекта исследования (коэффициенты поглощения).
В ЭВМ выполняется математическая реконструкция коэффициентов поглощения и пространственное их распределение на квадратной многоклеточной матрице, а полученные изображения передаются для визуальной оценки на экран дисплея.
За одно сканирование получают два соприкасающихся между собой среза толщиной 10 мм каждый. Картина среза восстанавливается на матрице размером 160х160.
Полученные коэффициенты поглощения выражают в относительных единицах шкалы, нижняя граница которой (-1000 ед.Н.) (ед.Н. - единицы Хаунсфильда или числа компьютерной томографии) соответствует ослаблению рентгеновских лучей в воздухе, верхняя (+1000 ед.Н.) - ослаблению в костях, а за ноль принимается коэффициент поглощения воды. Различные ткани мозга и жидкие среды имеют разные по величине коэффициенты поглощения. Например коэффициент поглощения жира находится в пределах от -100 до 0 ед.Н., спинномозговой жидкости - от 2 до 16 ед.Н., крови - от 28 до 62 ед.Н. Это обеспечивает возможность получать на компьютерных томограммах основные структуры мозга и многие патологические процессы в них. Чувствительность системы в улавливании перепада рентгеновской плотности в обычном режиме исследования не превышает 5 ед.Н., что составляет 0,5%.
На экране дисплея высоким значениям плотности (например, кости) соответствует светлые участки, низким - темные. Градационная способность экрана составляет 15-16 полутоновых ступеней, различаемые человеческим глазом. На каждую ступень, таким образом, приходится около 130 ед.Н.
Для полной реализации высокой разрешающей способности томографа по плотности в аппарате предусмотрены средства управления так называемой ширины окна и его уровня (положения), чтобы дать рентгенологу возможность анализировать изображение на различных участках шкалы коэффициентов поглощения. Ширина окна - это величина разности наибольшего и наименьшего коэффициентов поглощения, соответствующая указанному перепаду яркости. Положение или уровень окна (центр окна) - это величина коэффициентов ослабления, равная середине окна и выбираемая из условий наилучшего выявления плотностей интересующей группы структур или тканей. Важнейшей характеристикой является качество получаемого изображения.
Известно, что качество визуализации анатомических образований головного мозга и очагов поражения зависит в основном от двух факторов: размера матрицы, на которой строится томограмма, и перепада показателей поглощения. Величина матрицы может оказывать существенное влияние на точность диагностики. Так, количество ошибочных диагнозов при анализе томограмм на матрице 80х80 клеток составляло 27%, а при работе на матрице 160х160 - уменьшилось до 11%.
Компьютерный томограф обладает двумя видами разрешающей способности: пространственной и по перепаду плотности. первый тип определяется размером клетки матрицы (обычно - 1,5х1,5 мм), второй равен 5 ед.Н. (0,5%). В соответствии с этими характеристиками теоретически можно различать элементы изображения размером 1,5х1,5 мм при перепаде плотности между ними не меньше 5 ед.Н. (1%) удается выявлять очаги величиной не менее 6х6 мм, а при разнице в 30 ед.Н. (3%) - детали размером 3х3 мм. Обычная рентгенография позволяет уловить минимальную разницу по плотности между соседними участками в 10-20%. Однако при очень значительном перепаде плотностей рядом расположенных структур возникают специфические для данного метода условия, снижающие его разрешающую способность, так как при построении изображения в этих случаях происходит математическое усреднение и при этом очаги небольших размеров могут быть не обнаружены. Чаще это происходит при небольших зонах пониженной плотности, расположенных вблизи массивных костных структур (пирамиды височных костей) или костей свода черепа. Важным условием для обеспечения проведения компьютерной томографии является неподвижное положение пациента, ибо движение во время исследования приводят к возникновению артефактов - наводок: полос темного цвета от образований с низким коэффициентом поглощения (воздух) и белых полос от структур с высоким КП (кость, металлические хирургические клипсы), что также снижает диагностические возможности. [№ 3, стр. 16-19]
2.3. Усиление контрастности.
Для получения более четкого изображения патологически измененных участков в головном мозге применяют эффект усиления контрастности, которых достигается внутривенным введением рентгеноконтрастного вещества. Увеличение плотности изображения на компьютерной томограмме после внутривенного введения контрастного вещества объясняется внутри- и внесосудистыми компонентами. Внутрисосудистое усиление находится в прямой зависимости от содержания йода в циркулирующей крови. При этом увеличение концентрации на 100 мг йода в 100 мл обусловливает величины абсорбции на 26 ед.Н. (ед.Н. - единицы Хаунсфильда или числа компьютерной томографии). При компьютерно-томографических измерениях венозных проб после введения 60% контрастного вещества в дозе 1 мл на кг массы тела, плотность потока повышается в среднем в течение 10 мин после инъекции, составляет 39,2 плюс-минус 9,8 ед.Н. Содержание контрастного вещества в протекающей крови изменяется в результате того, что относительно быстро начинается выделение его почками. Уже в течение первых 5 мин после болюсной инъекции концентрация вещества в крови в среднем снижается на 20%, в последующие 5 мин - на 13% и еще через 5 мин - на 5%.
Нормальное увеличение плотности мозга на компьютерной томограмме после введения контрастного вещества связано с внутрисосудистой кон-центрацией йода. Можно получить изображение сосудов диаметром до 1,5 мм, если уровень йода в крови составляет примерно 4 мг/мл и при условии, что сосуд расположен перпендикулярно к плоскости среза. Наблюдения привели к выводу, что контрастное вещество накапливается в опухолях. [№ 4, стр. 17-19]
3. ЦИФРОВЫЕ РЕНТГЕНОГРАФИЧЕСКИЕ СИСТЕМЫ
Преобразование традиционной рентгенограммы в цифровой массив с последующей возможностью обработки рентгенограмм методами вычислительной техники стало распространенным процессом. Такие аналоговые системы зачастую имеют очень жесткие ограничения на экспозицию из-за малого динамического диапазона рентгеновской пленки. В отличие от аналоговых прямые цифровые рентгенографические системы позволяют получать диагностические изображения без промежуточных носителей, при любом необходимом уровне дозы, причем это изображение можно обрабатывать и отображать самыми различными способами. [№ 6]
На рис.2 приведена схема типичной цифровой рентгенографической системы. Рентгеновская трубка и приемник изображения сопряжены с компьютером и управляются им, а получаемое изображение запоминается, обрабатывается (в цифровой форме) и отображается на телеэкране, составляющем часть пульта управления (или устройства вывода данных) оператора-рентгенолога.
Аналогичные пульты управления можно применять и в других системах получения изображения, например на основе ядерного магнитного резонанса или компьютерной томографии. Цифровое изображение можно записать на магнитном носителе, оптическом диске или же на специальном записывающем устройстве, способном постоянно вести регистрацию изображения на пленку в аналоговой форме.

Рис.2 Составные элементы цифровой системы получения рентгеновских
изображений
В цифровой рентгенологии могут найти применение два класса приемников изображения: приемники с непосредственным формированием изображения и приемники с частичной регистрацией изображения, в которых полное изображение формируется путем сканирования либо рентгеновским пучком, либо приемным устройством (сканирующая проекционная рентгенография). В цифровой рентгенографии применяют усилитель изображения, ионографическую камеру и устройство с вынужденной люминисценцией. Эти приемники могут непосредственно формировать цифровые изображения без промежуточной регистрации и хранения. Усилители изображения не обладают наилучшим пространственным разрешением или контрастом, однако имеют высокое быстродействие. Аналого-цифровое преобразование флюорограммы с числом точек в изображении 512х512 может занимать время менее 0,03 с. Даже при числе точек 2048х2048 в изображении время преобразования изображения в цифровую форму составляет всего несколько секунд. Время считывания изображения с пластины с вынужденной люминисценции или ионографической камеры значительно больше, хотя последнее выгодно отли-чается лучшим разрешением и динамическим диапазоном.
Записанное на фотопленке изображение можно преобразовать в цифровую форму с помощью сканирующего микроденситометра, но любая информация, зафиксированная на фотопленке со слишком малой или, наоборот, слишком высокой оптической плотностью, будет искажена из-за влияния характеристик пленки. В цифровую форму можно преобразовать и ксеро-рентгенограмму также с помощью сканирующего денситометра, работающего в отраженном свете, или путем непосредственного считывания зарядового изображения с селеновой пластины. [№ 5, стр. 99-100]
В России прямая цифровая рентгенографическая система Института ядерной физики (ИЯФ) СО РАН применяется в нескольких клинических больницах. В этой системе рентгеновская пленка как регистратор рентгеновского излучения заменена многопроволочной пропорциональной камерой. Такая камера вместе с электронными схемами усиления и формирования импульсов представляет собой линейку на 256 практически независимых каналов, имеющих чувствительную поверхность 1х1 мм. (В последних моделях 350 каналов и 0,5х0,5 мм.) Использование в счетчиках в качестве рабочего газа ксенона при давлении 3 кгс/см2 обеспечивает высокую эффективность регистрации излучения. Эта система может быть отнесена к классу ионографических приборов для цифровой рентгенографии, передающих изображение на внешние устройства отображения.
В других цифровых рентгенографических системах используют твердотельные приемники с высоким коэффициентом поглощения рентгеновского излучения.
В обоих разновидностях упомянутых рентгенографических систем применяется метод сканирования с построчной регистрацией изображения, которое воспроизводится в целое на дисплее компьютера (сканирующая проекционная рентгенография).
Ко второму классу цифровых рентгенографических систем следует отнести люминофоры с памятью и вынужденной люминесценцией, которая затем регистрируется. Это приемник с непосредственным формированием изображения. [№ 6]
Системы получения изображения со сканированием рентгеновским пучком и приемником имеют важное преимущество, состоящее в том, что в них хорошо подавляется рассеяние. В этих системах один коллиматор располагается перед пациентом с целью ограничения первичного рентгеновского пучка до размеров, необходимых для работы приемника, а другой - за пациентом, чтобы уменьшить рассеяние. На рис.3 изображена линейная сканирующая система для получения цифрового изображения грудной клетки. Приемником в системе является полоска из оксисульфида гадолиния, считывание информации с которой ведется линейной матрицей из 1024 фотодиодов. Проекционные рентгенограммы синтезируются также сканерами компьютерной томографии и выполняют вспомогательную роль при выделении соответствующего сечения.
Главным недостатком сканирующих систем является то, что большая часть полезной выходной мощности рентгеновской трубки теряется и что необходимы большие времена экспозиции (до 10 с).

Рис.3 Система линейного сканирования для цифровой рентгенографии
грудной клетки.
Матрицы изображения из 512х512 элементов может быть вполне достаточно для целей цифровой флюороскопии (флюорографии), тогда как система рентгеноскопии грудной клетки может потребовать матрицы с числом элементов 1024х1024 при размерах элемента изображения 0,4 мм.
Число градаций в изображении зависит от медицинского назначения. Аналого-цифрового преобразования на 8 бит, обеспечивающего точность 0,4%, вполне достаточно для регистрации зашумленных изображений или больших массивов (меньшей ступени градации яркости соответствует больший уровень шума), однако для ряда приложений может понадобиться и 10-битовый АЦП (точность 0,1%).
Если требуется быстрый доступ к информации, полученной за длительный период времени, целесообразно применять оптические диски. Емкость памяти 12-дюймового оптического диска равна примерно 2 гигабайт, что соответствует 1900 изображениям размером 1024х1024 по 8 бит каждое (без сжатия данных). Для считывания с оптического диска может быть использовано автоматическое устройство съема, позволяющее обеспечить быстрый доступ к любому изображению. Возможность работы со всеми изображениями в цифровой форме весьма привлекательна, а системы, выполняющие это, называются системами хранения и передачи изображения (СПХИ или СХПИ). [№ 5, стр. 100-102]

Рис.5 Принципиальная схема взаимодействия элементов системы получения, обработки, хранения и передачи рентгеновских диагностических изображений.
На рис.5 изображена принципиальная схема взаимодействия элементов системы получения, обработки, хранения и передачи рентгеновских диагностических изображений.
Система представлена тремя каналами: 1) традиционная рентгенография; 2) цифровая рентгенографическая установка; 3) рентгеноскопия (видеосигнал с УРИ).
Первый канал. Рентгенограммы, полученные с помощью традиционного процесса, поступают на обработку в полутоновый графический сканер, с помощью которого рентгенодиагностическое изображение вводится в память компьютера. После этого такая преобразованная рентгенограмма может обрабатываться средствами компьютерной техники, но в рамках узкого динамического диапазона рентгеновской пленки. Это изображение может быть введено в электронный архив и извлекаться оттуда по требованию. Эта оцифрованная рентгенограмма уже ничем не отличается от прямых цифровых рентгенограмм по доступности средствам обработки.
Третий канал . Рентгеновские изображения из рентгенотелевизионного канала УРИ могут захватываться специализированным адаптером видеоввода как в режиме реального времени, так и с видеомагнитофонного кадра. Последнее предпочтительно, так как позволяет при просмотре видеомагнитофонных изображений выбрать нужный кадр для занесения его в архив. Объектом ввода в электронный архив могут быть любые изображения, получаемые при рентгеноскопии с помощью УРИ.
Первый и третий каналы дают возможность преобразовать традиционные рентгеновские изображения (рентгенограммы и кадры видеотелевизионного тракта) в цифровое изображение. Этот прием имеет особое значение, потому что он представляет возможность достоверно сравнить изображения, полученные различными способами. Следующим преимуществом преобразования являются возможность помещения его в электронный архив и выполнение всех операций с цифровым изображением. Следует особенно подчеркнуть возможность передачи изображения по компьютерным сетям, потому что в последние годы «взгляды медиков фокусируются на передаче изображений » как основном средстве обеспечения доступа к материалам, что имеет колоссальное значение как для диагностики, так и для процессов обучения.
Второй канал. Это собственно канал цифровой рентгенографической установки. Он состоит из двух подсистем: автоматизированного рабочего места (АРМ) лаборанта и АРМ врача-рентгенолога (ВР), объединенных в локальную сеть. В АРМ рентгенолаборанта происходит внесение сведений о больном, необходимых организационных и клинических данных и управление процессом регистрации изображения (синхронное включение сканера и высокого напряжения и др.). После получения рентгеновского изображения оно и сведения о пациенте по локальной сети поступают в АРМ ВР. При этом процесс рентгенографии и передачи изображений от АРМ лаборанта в АРМ врача происходит без промедлений и в реальном времени, не прерывая работы врача ни на одной ступени, т.е. происходит непрерывная и независимая работа на обоих рабочих местах. На АРМ ВР выполняются программная обработка изображений для извлечения диагностической информации, поиск предшествующих изображений пациентов и сравнение с вновь полученными, регистрация новых пациентов и изображений в базе данных, приведение их к формату, оптимальному для архивирования, и другие манипуляции, доступные электронным технологиям персонального компьютера. Программное обеспечение позволяет врачу-рентгенологу при необходимости создать твердые копии изображений на лазерном принтере ( этот способ получения твердых копий несколько уступает в точности передачи диагностических изображений теплопечати или поляроидному фотопроцессу, но значительно дешевле всех других способов воспроизведения изображения); при наличии сетевой связи позволяет передать их клинические подразделения, связаться с консультационными центрами или центральным архивом по электронной связи. Блок базы данных, являющийся сердцевиной системы, формализует все этапы работы с пациентом от внесения данных лаборантом до размещения в архивное хранение, позволяет врачу-рентгенологу создавать все виды стандартной отчетности, а также анализировать проведенную работу по целевым выборкам. Конечным этапом работы с цифровым изображением всех трех видов является его архивирование на магнитный или оптический носитель. [№ 6]
3.1. Состав технических средств АРМ ВР.
Выбор технических средств для АРМ ВР (автоматизированное рабочее место врача-рентгенолога) во многом зависит от типа решаемых задач. Обычно в качестве технической базы для АРМ обработки изображений используют графические станции или персональные компьютеры. Графические станции, созданные прежде всего для решений задач машинной графики, оборудованы специальными графическими процессорами, ускоряющими процедуры построения графических примитивов (особенно трехмерных). Для задач обработки и анализа изображений более существенна скорость обработки видеоданных. Поэтому в качестве технической базы АРМ ВР использована широко распространенная и дешевая ПЭВМ типа IBM PC/AT.
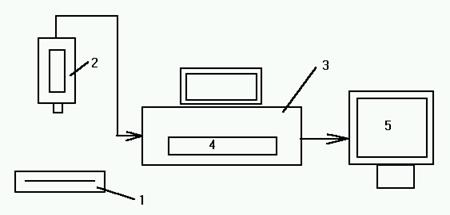
Рис.4 Блок-схема технических средств АРМ ВР.
1-негатоскоп; 2-телевизионная камера; 3-ПЭВМ; 4-фрейм-граббер; 5-телемонитор.
Практическая работа показала, что производительность персонального компьютера во многих случаях достаточна, чтобы решать задачи обработки видеоданных в реальном времени врача. Кроме того ПЭВМ имеют мощные технические и программные средства для организации «оконного» человеко-машинного диалога.
При использовании изображений, записанных в аналоговом виде, например рентгенограмм, необходимо устройство для ввода и визуализации их в ЭВМ. В качестве такого устройства удобно использовать фрейм-граббер конструктивно оформленный в виде платы, расположенной в корпусе ПЭВМ. Также необходимо иметь телекамеру с объективом, световой стол для подсветки рентгенограмм (негатоскоп) и телемонитор для визуализации изображений (рис.4). Устройство цифрового ввода и визуализации изображений должно обеспечивать высокое качество представления медицинских изображений, чтобы при их использовании не терялась важная диагностическая информация.
[№ 7]
3.2. Области применения и преимущества цифровых систем.
К преимуществам цифровых рентгенографических систем относятся следующие четыре фактора: цифровое отображение изображения; пониженная доза облучения; цифровая обработка изображений; цифровое хранение и улучшение качества изображений.
Рассмотрим первое преимущество, связанное с отображением цифровой информации. Разложение изображения по уровням яркости на экране становится в полной мере доступным для пользователя. Весь диапазон оптических яркостей может быть использован для отображения лишь одного участка изображения, что приводит к повышению контраста в интересующей области. В распоряжении оператора имеются алгоритмы для аналоговой обработки изображения с целью оптимального использования возможностей систем отображения. [№ 5, стр. 103]
Это свойство цифровой рентгенографии также дает возможность снизить лучевую нагрузку на пациента путем уменьшения количества рентгенограмм для получения диагностической информации (той же полезности).
Цифровое отображение при его компьютерной обработке позволяет извлечь количественную и качественную информацию и таким образом перейти от интуитивно-эмпирического способа изображения к объективно измеренному.
Существенным преимуществам цифровой рентгенографии перед экранно-пленочным процессом являются простота и скорость получения изображения. Изображение становится доступным анализу врачом-рентгенологом в момент окончания экспозиции. [№ 6]
Второе преимущество цифровой рентгенологии - возможность снижения дозы облучения. Если в обычной рентгенологии доза облучения зависит от чувствительности приемника изображения и динамического диапазона пленки, то в цифровой рентгенологии оба этих показателя могут оказаться несущественными. Снижения дозы можно достичь установкой экспозиции, при которой поддерживается требуемый уровень шума в изображении. Дальнейшее уменьшение дозы возможно путем подбора такой длины волны рентгеновского излучения, которая обеспечивала бы минимальную дозу при данном отношении сигнал/шум, а также путем ликвидации любых потерь контраста с помощью описанных выше методов отображения цифровых изображений.
Третье преимущество цифровой рентгенологии - это возможность цифровой обработки изображений. Рентгенолог должен выявить аномальные образования на осложненной фоном нормальной структуре биоткани. Он может не заметить мелких деталей в изображении, которые система разрешает, или пропустить слабоконтрастную структуру, видимую на фоне шумов изображения, из-за сложного строения окружающих (или сверхлежащих) тканей. Субстракционный метод в рентгенографии позволяет устранить большую часть паразитной фоновой структуры и тем самым увеличить вероятность выявления важных деталей на рентгенограмме. Компьютерную томографию можно рассматривать как частный случай метода субстракционной рентгенографии, в котором из обычных проекционных изображений устраняется информация о вышележащих структурах. [№ 5, стр.103-104]
Особенная ценность применения цифровой рентгенографии заключается в возможности полного отказа от рентгеновской пленки и связанного с ней фотохимического процесса. Это делает рентгенологическое исследование экологически чище, а хранение информации в цифровом виде позволяет создать легкодоступные рентгеновские архивы. Новые количественные формы обработки информации открывают широкие возможности стандартизации получения изображений, приведения их к стандарту качества в момент получения и при отсроченных повторных исследованиях. Немаловажна открывающаяся возможность передачи изображения на любые расстояния при помощи средств компьютерных коммуникаций.
Приведенные соображения с достаточной наглядностью демонстрируют прогрессивность внедрения в практику цифровой рентгенографии, которая сможет перевести диагностическую рентгенологию на новый более высокий технологический уровень. Отказ от дорогостоящих расходных материалов обнаруживает и ее высокую экономическую эффективность, что в сочетании с возможностью уменьшения лучевых нагрузок на пациентов делает ее применение в практике особенно привлекательным. [№ 6]
3.3. Цифровая рентгенография с экрана электронно-оптического преобразователя (ЭОП).
Система рентгенографии с экрана ЭОП (рис. 5) состоит, как и обычная система электронно-оптического преобразования для просвечивания, из ЭОП, телевизионного тракта с высоким разрешением, рентгеновского высоковольтного генератора и рентгеновского излучателя. Сюда же входит штатив для исследования, цифровой преобразователь изображения и другие компоненты.
При обычной методике рентгенографии с экрана ЭОП с помощью 100 мм фотокамеры или кинокамеры переснимается оптическое изображение на выходном экране преобразователя.
В цифровой же системе сигнал, поступающий с видеокамеры, аналого-цифровым преобразователем трансформируется в набор цифровых данных и передается в накопительное устройство. Затем эти данные, в соответствии с выбранными исследователем параметрами, компьютерное устройство переводит в видимое изображение.
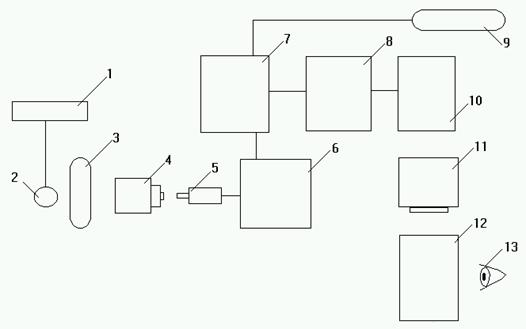 Рис.5 Цифровая рентгенография с экрана ЭОП
Рис.5 Цифровая рентгенография с экрана ЭОП
1-генератор; 2-рентгеновская трубка; 3-пациент; 4-ЭОП; 5-видеокамера;
6-аналого-цифровой преобразователь; 7-накопитель изображений;
8-видеопроцессор; 9-сеть; 10-цифро-аналоговый преобразователь;
11-монитор; 12-снимок; 13-рентгенолог.
3.4.Цифровая люминесцентная рентгенография (ЦЛР).
Применяемые в ЦЛР (рис.6) пластины-приемники изображения после их экспонирования рентгеновским излучением последовательно, точка за точкой, сканируются специальным лазерным устройством, а возникающий в процессе лазерного сканирования световой пучок трансформируется в цифровой сигнал. После цифрового усиления контуров и контрастности элементов изображения оно лазерным принтером печатается на пленке или воспроизводится на телевизионном мониторе рабочей консоли. Люминесцентные пластины-накопители выпускаются в стандартных формах рентгеновской пленки, помещаются вместо обычных комплектов «пленка-усиливающий экран» в кассету и применяются в обычных рентгеновских аппаратах.
Такая пластина обладает значительно большей экспозиционной широтой, чем общепринятые комбинации пленка-экран, благодаря чему значительно расширяется интервал между недо- и переэкспонированием. Этим способом можно получать достаточно контрастные изображения даже при резко сниженной экспозиционной дозе, нижним пределом которой является лишь уровень квантового шума. Поэтому даже при рентгенографии в палате у постели больного методика ЦЛР гарантирует получения качественного снимка.
При ЦЛР используются цифровые преобразователи, пространственное разрешение которых выше, чем у большинства используемых в настоящее время для обычной рентгенографии комбинаций экран-пленка. Все же особым преимуществом ЦЛР является передача малоконтрастных деталей, тогда как передача очень мелких деталей, таких, например, как микрокальценаты в молочной железе, остается прерогативой рентгенографии на рентгеновской пленке.
 Рис. 6 Цифровая люминесцентная рентгенография.
Рис. 6 Цифровая люминесцентная рентгенография.
1-генератор; 2-рентгеновская трубка; 3-пациент; 4-запоминающая
пластина; 5-транспортирующее устройство; 6-аналого-цифровой
преобразователь; 7-накопитель изображений;8-видеопроцессор; 9-сеть;
10-цифро-аналоговый преобразователь; 11-монитор; 12-снимок;
13-рентгенолог.
3.5. Селеновая рентгенография.
Селеновые детекторы представляют собой новейшую систему цифровой рентгенографии (рис. 7). Основной частью такого устройства служит детектор в виде барабана, покрытого слоем аморфного селена. Селеновая рентгенография в настоящее время используется только в системах рентгенографии грудной клетки. Характерная для снимков грудной клетки высокая контрастность между легочными полями и областью средостения при цифровой обработке сглаживается, не уменьшая при этом контрастности деталей изображения. Другим преимуществом селенового детектора является высокий коэффициент отношения сигнал/шум.
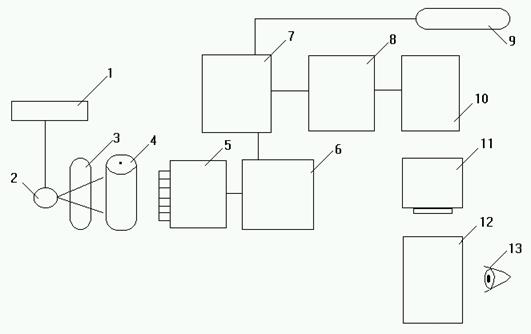
Рис.5 Цифровая селеновая рентгенография.
1-генератор; 2-рентгеновская трубка; 3-пациент; 4-селеновый барабан;
5-сканирующие электроды+усилитель; 6-аналого-цифровой преобразо-
ватель; 7-накопитель изображений; 8-видеопроцессор; 9-сеть;
10-цифро-аналоговый преобразователь; 11-монитор; 12-снимок;
13-рентгенолог.
4. Математические основы компьютерной томографии
Исследования внутренней структуры объектов с помощью рентгеновского излучения широко распространены и хорошо известны. Ослабление рентгеновского излучения вдоль луча, соединяющего источник и приемник, является интегральной характеристикой плотности исследуемого объекта. С математической точки зрения речь идет о задаче восстановления функции по ее интегральным значениям вдоль некоторого семейства лучей. Различные лучи соответствуют различным (относительно объекта) положениям источника и приемника излучения. Такая модель является простейшей, но во многих случаях хорошо отражает реальную ситуацию и подтверждается исследованиям реальных тестовых объектов. Плотность реальных объектов является функцией трех пространственных координат. Однако в классической компьютерной томографии трехмерный объект представляют в виде набора тонких срезов. Внутри каждого среза плотность считают функцией только двух переменных. При исследовании фиксированного среза систему источник-приемник устраивают таким образом, что регистрируются данные только по лучам, лежащим в тонком слое относительно центральной плоскости среза. Таким образом приходят к задаче восстановления функции двух переменных по ее интегральным значениям вдоль некоторого семейства лучей Для регистрации в веерной схеме, чаще встречающейся в реальных томографах, используется линейка детекторов, различные положения источника относительно объекта обеспечиваются вращением системы регистрации или объекта.
4.1. Математическая постановка задачи рентгеновской компьютерной томографии, преобразование Радона и формулы обращения.
В компьютерной рентгеновской томографии трехмерный объект представляется обычно в виде набора тонких срезов. Для восстановления плотности среза решается задача обращения двумерного преобразования Радона. Преобразованием Радона функции f(x, y) называется функция, ![]() определяемая равенством
определяемая равенством ![]() .
.
Обычно для восстановления функции двух переменных по ее интегралам вдоль прямых используется метод свертки и обратного проецирования. В этом методе формула обращения преобразования Радона записывается без явного использования обобщенных функций. Однако наиболее общий и естественный вид формулы обращения преобразования Радона приобретают при использовании аппарата обобщенных функций. Далее будет рассмотрено соотношение между методом обобщенных функций и методом свертки и обратного проецирования.
Перед изложением собственно численного алгоритма будет дан вывод формулы обращения, позволяющий естественным образом перейти к построению алгоритма.
В силу равенства
![]()
функция ![]() при любом фиксированном p
определяется своими значениями при
при любом фиксированном p
определяется своими значениями при ![]() . Это позволяет нам перейти к функции
. Это позволяет нам перейти к функции
![]() .
.
Здесь L(r, φ) - прямая, ортогональная лучу, имеющему угол φ ρ положительным направлением оси X, и отстоящая от начала координат на расстояние r (r![]() 0), при r < 0 L(r, φ) - прямая, симметричная относительно начала координат прямой L(|r|, φ). Выразим f(x, y) через I(r, φ).
0), при r < 0 L(r, φ) - прямая, симметричная относительно начала координат прямой L(|r|, φ). Выразим f(x, y) через I(r, φ).
Поскольку
 ,
,
где ![]() - преобразование Фурье функции f, то, переходя к полярным координатам после элементарных преобразований интеграла по φ на интервале [π, 2π], οолучаем
- преобразование Фурье функции f, то, переходя к полярным координатам после элементарных преобразований интеграла по φ на интервале [π, 2π], οолучаем
 .
.
Введем функцию S(z, φ), полагая
 .
.
При фиксированном φ функция S(z, φ) εсть обратное одномерное преобразование Фурье от произведения ![]() и |r|. Для
и |r|. Для ![]() справедливо равенство
справедливо равенство
 .
.
Обратное преобразование Фурье от |r| есть обобщенная функция v1/πz2
. Переходя от преобразования Фурье произведения к свертке, получаем S(z,φ) = I(z,φ)![]() (v1/πz2
). Используя регуляризацию функции 1/z2
[19] приходим к выражению
(v1/πz2
). Используя регуляризацию функции 1/z2
[19] приходим к выражению
 . (1.5.1)
. (1.5.1)
Таким образом, для f(x, y) справедлива формула
 , (1.5.2)
, (1.5.2)
позволяющая выразить искомую функцию через наблюдаемые данные.
Прежде чем перейти к дискретному варианту сделаем ряд замечаний, связанных с обоснованием корректности рассматриваемых алгоритмов в реальных ситуациях. Обобщенные функции являются функционалами над пространством бесконечно дифференцируемых быстро убывающих функций. Однако при построении аппроксимаций исходных реальных данных по отсчетам, заданным в дискретных точках, желательно иметь менее жесткие требования к гладкости аппроксимирующих функций. Свертка с обобщенными функциями, в частности, с функцией 1/z2 , может быть определена для значительно менее гладких функций, это очень важно при доказательстве корректности применения численных алгоритмов, получаемых с помощью аппарата обобщенных функций, к реальным данным.
Перейдем к дискретному варианту. Будем предполагать, что f(x, y) = 0 вне круга радиуса R с центром в нуле. Исходными данными являются величины I(ri , φi ), здесь ri v отсчеты в интервале [-R, R], 1 ≤ i ≤ M - отсчеты в интервал [0, π], 1 ≤ j ≤ N. Если теперь при заданных значениях функции I(r, φ) β отсчетах (ri , φi ) построить аппроксимацию I(r, φ) так, что для S(z,φ) βыполняется равенство (1.5.1), то используя (1.5.1) и (1.5.2) можно получить приближение к f(x, y). В дальнейшем будем предполагать, что отсчеты на осях r и φ являются равноотстоящими.
При каждом фиксированном φj
определим ![]() следующим образом.
следующим образом.
1. Функция ![]() имеет непрерывную первую производную по r.
имеет непрерывную первую производную по r.
2. В узлах решетки аппроксимирующая функция совпадает с заданными отсчетами, а ее производная в этих точках равна выборочной. То есть справедливы равенства: ![]() ,
, ![]() , здесь h = 2R/(M-1), I(r0
,φj
) = I(rM+1
, φj
) = 0, i = 1, -, M.
, здесь h = 2R/(M-1), I(r0
,φj
) = I(rM+1
, φj
) = 0, i = 1, -, M.
3. На интервале [ri
, ri+1
] функция ![]() есть полином третьей степени от r.
есть полином третьей степени от r.
Перечисленные условия позволяют в явном виде получить коэффициенты соответствующего сплайна. Непосредственными вычислениями можно получить, что
 ,
,
где

Q(x) = Q(-x), Q(x) = 0 при |x|> 2h, h=ri+1 -ri .
Функция Q(x) имеет разрывы второй производной, но модуль второй производной интегрируем, используя это обстоятельство можно показать, что свертка S0
(z) = Q(x) ![]() (-1/πz2
) выражается формулой (1.5.1). Непосредственными вычислениями получаем
(-1/πz2
) выражается формулой (1.5.1). Непосредственными вычислениями получаем

Графики функций Q(x) и S0 (z) для различных значений h представлены на рис. 1и рис. 2.


Таким образом,
 .
.
Заменяя в (1.5.2) S на ![]() и интеграл частной суммой, получаем f*
(x, y) - приближение к функции f(x, y),
и интеграл частной суммой, получаем f*
(x, y) - приближение к функции f(x, y),
 . (1.5.3)
. (1.5.3)
Как уже отмечалось выше, обычно в компьютерной томографии используется метод свертки и обратного проецирования. Рассмотрим соотношение между этим методом и методом, изложенным в настоящем параграфе. Используя интегрирование по частям, свертку с обобщенной функцией 1/z2 можно заменить дифференцированием и сверткой с 1/z (преобразованием Гильберта).
То есть функцию
S(z, φ) = I(z, φ) ![]() 1/z2
1/z2
можно представить в виде
S(z, φ) = Iz
/
(z, φ) ![]() 1/z
1/z
При построении численных алгоритмов вместо обобщенной функции 1/z или, что то же самое, интеграла в смысле главного значения, в методе свертки и обратного проецирования используют некоторую последовательность регулярных функций pА (z), сходящуюся к 1/z (в смысле обобщенных функций) при A стремящемся к бесконечности. Используя интегрирование по частям, дифференцирование переносят на функции pА (z) и таким образом получают регулярные функции, сходящиеся к 1/z2 , то есть свертка с обобщенной функцией 1/z2 заменяется последовательностью сверток с регулярными функциями p/ А (z).
Таким образом, шаг свертки в классическом методе можно интерпретировать следующим образом: исходные данные аппроксимируются ступенчатой функцией и осуществляется свертка с регулярной функцией, являющейся приближением к обобщенной функцией 1/z2 .
В методе настоящего параграфа исходные данные аппроксимируются более гладкими функциями - сплайнами 3-го порядка. Это позволяет точно вычислить свертку с обобщенной функцией 1/z2 , причем в явном виде.
Шаг обратного проецирования соответствующий интегрированию свертки в обоих алгоритмах одинаков.
При использовании алгоритмов в реальных ситуациях важно уметь оценивать влияние шумов на точность получаемых приближений. Наличие явного выражения для аппроксимирующей функции позволяет вычислить дисперсию ошибки в любой точке при фиксированных δr, δφ θ известных статистических характеристиках шума. Для случая независимого, аддитивного, стационарного шума ξ (z) можно сделать следующее замечание. Рассмотрим процесс η, являющийся сверткой с 1/z2 процесса ξ. Спектральная плотность этого линейного преобразования есть |λ|. Для спектральных плотностей процессов ξ и η получаем соотношение f η (λ) = |λ|2 fξ (λ). Δисперсия процесса η конечна, если интегрируема fη (λ), ςо есть процесс ξ дифференцируем в среднеквадратическом. Для того, чтобы свертка выражалась формулой (1.5.1), на процесс ξ нужно наложить дополнительные условия, потребовав, например, чтобы выборочные функции с вероятностью единица имели конечную вторую производную.
Численное моделирование и восстановление плотности реальных объектов с использование метода, изложенного в настоящем параграфе, показало высокую точность метода, особенно при исследовании объектов и дефектов, имеющих сложную конфигурацию и участки с резкими границами.
Примеры восстановления, с использованием методов, изложенных в настоящем параграфе, приведены на рисунке 3. Тестовый объект состоит из 10 частиц. Рис.3(слева) соответствует 10 поворотам и Рис.3 (справа) соответствует 32 поворотам. 
4.2. Приведение формул обращения томографической реконструкции в конусе лучей к виду, позволяющему строить численные алгоритмы.
В компьютерной рентгеновской томографии трехмерный объект представляется обычно в виде набора тонких срезов. Для восстановления плотности среза решается задача обращения двумерного преобразования Радона. Для исследования ряда объектов более естественной является другая схема, когда источник излучения движется по некоторой пространственной кривой. Каждой точке кривой соответствует конус лучей, проходящих через эту точку. Исходными данными являются данные об ослаблении излучения при прохождении через объект. Математически задача ставится как задача восстановления функции трех переменных по интегралам вдоль прямых, проходящих через заданную кривую. Была получена формула обращения для функций, имеющих финитный носитель, и для кривых, удовлетворяющих определенным условиям. Главным в этих условиях является то, что любая плоскость, пересекающая объект пересекает кривую, по которой движется источник. Примером кривой, удовлетворяющей условиям, является совокупность двух единичных окружностей, лежащих во взаимно перпендикулярных плоскостях. Однако построение численных алгоритмов непосредственно на основании этой формулы, затруднительно. Дело, в частности, в том, что формула обращения основана на преобразовании Фурье от однородной функции, получаемой из исходных данных. Причем преобразование Фурье понимается в смысле обобщенных функций, а преобразование Фурье в обычном смысле может не существовать. В настоящем параграфе приводятся выражения для используемого преобразования Фурье, позволяющие при построении численных алгоритмов использовать метод, изложенный в предыдущем параграфе. Устанавливаются также некоторые соотношения между результатами
Пустьзаданыфункцияf (x ) = f (x 1 , x 2 , x 3 ) , точкаS = (s 1 , s 2 , s 3 ) ивекторa = (a 1 , a 2 , a 3 ). Лучевым преобразованием функции f (x ) будем называть функцию
 ,
,
являющуюся интегралом от f (x ) вдоль луча, исходящего из точки S в направлении вектора a .
Наряду с функцией ![]() в некоторых ситуациях рассматривается функция
в некоторых ситуациях рассматривается функция
 ,
,
являющаяся интегралом по всей прямой или, что тоже самое, суммой интегралов вдоль лучей из точки z в направлениях a и -a .
Множество точек S , для которых известно лучевое преобразование обычно является множеством точек, принадлежащих некоторой кривой, являющейся траекторией движения источника излучения.
Пусть задана кривая, по которой движется источник, Ф(l ) = (Ф1 (l ), Ф2 (l ), Ф3 (l )) параметр l пробегает некоторый интервал Ù действительной прямой. Для любого a = (a 1 , a 2 , a 3 ) и l Î Ù определим функцию
 .
.
Функция g(a ,l ) есть интеграл от функции f
(x
) вдоль проходящего через точку Ф(l ) в направлении вектора a . Отметим, что при любом фиксированном l функция ![]() является l однородной функцией a степени -1:
является l однородной функцией a степени -1:
 . (2.1.1)
. (2.1.1)
Для функций, имеющих финитный носитель, в [101] получена формула:
 . (2.1.2)
. (2.1.2)
При фиксированном l функция G+
(b ,l ) есть преобразование Фурье от функции ![]() по переменной a , b = (cosq cosf , sinq cosf , sinf ). В формуле (2.1.2) l зависит от x и b и выбирается из условий: скалярное произведение (b , x) равно (b ,f (l )), но (b ,Ф(l )) не равно нулю. Значение функции f
(x
) может быть восстановлено в точке x
, если такое l существует для любого b . Геометрически это означает, что любая плоскость, пересекающая точку x
носителя функции, пересекает кривую Ф(l ) так, что знаменатель в (2.1.2) не обращается в нуль. Примером кривой, удовлетворяющей условиям Кириллова-Туя, является совокупность двух единичных окружностей, лежащих во взаимно перпендикулярных плоскостях, если носитель лежит в единичном шаре. Для цилиндрических объектов можно использовать винтовую линию.
по переменной a , b = (cosq cosf , sinq cosf , sinf ). В формуле (2.1.2) l зависит от x и b и выбирается из условий: скалярное произведение (b , x) равно (b ,f (l )), но (b ,Ф(l )) не равно нулю. Значение функции f
(x
) может быть восстановлено в точке x
, если такое l существует для любого b . Геометрически это означает, что любая плоскость, пересекающая точку x
носителя функции, пересекает кривую Ф(l ) так, что знаменатель в (2.1.2) не обращается в нуль. Примером кривой, удовлетворяющей условиям Кириллова-Туя, является совокупность двух единичных окружностей, лежащих во взаимно перпендикулярных плоскостях, если носитель лежит в единичном шаре. Для цилиндрических объектов можно использовать винтовую линию.
В формулу (2.1.2) входит G+
(b ,l ) - преобразование Фурье от функции ![]() , однако преобразование Фурье, понимаемое в обычном смысле:
, однако преобразование Фурье, понимаемое в обычном смысле:
 ,
,
в данном случае не существует, так как ![]() является однородной и имеет на бесконечности порядок 1/ê a ê . Преоразование Фурье здесь понимается в смысле обобщенных функций. Поскольку
является однородной и имеет на бесконечности порядок 1/ê a ê . Преоразование Фурье здесь понимается в смысле обобщенных функций. Поскольку ![]() однородная функция, то при любом фиксированном l исходные данные, полностью определяются своими значениями на поверхности ê a ê =1. Переход к функции, заданной во всем пространстве R3
при использовании преобразования Фурье приводит к обобщенным функциям. Преобразование Фурье в смысле обобщенных функций является линейным функционалом над соответствующим пространством. Подробнее об этом будет сказано в следующих параграфах. Здесь нам важно отметить, что не любой функционал задается с помощью регулярной функции. Для того, чтобы использовать формулы типа (2) для построения алгоритмов, необходимо показать, что
однородная функция, то при любом фиксированном l исходные данные, полностью определяются своими значениями на поверхности ê a ê =1. Переход к функции, заданной во всем пространстве R3
при использовании преобразования Фурье приводит к обобщенным функциям. Преобразование Фурье в смысле обобщенных функций является линейным функционалом над соответствующим пространством. Подробнее об этом будет сказано в следующих параграфах. Здесь нам важно отметить, что не любой функционал задается с помощью регулярной функции. Для того, чтобы использовать формулы типа (2) для построения алгоритмов, необходимо показать, что ![]() задается с помощью регулярной функции и иметь для нее выражения через функцию
задается с помощью регулярной функции и иметь для нее выражения через функцию ![]() . В работе [101] дается выражение, связывающее
. В работе [101] дается выражение, связывающее ![]() , при x отличном от нуля с помощью регулярных операций с искомой функций f
(x
), то есть фактически показано, что функционал
, при x отличном от нуля с помощью регулярных операций с искомой функций f
(x
), то есть фактически показано, что функционал ![]() задается с помощью регулярной функции. Однако для построения алгоритмов томографической реконструкции нужно
задается с помощью регулярной функции. Однако для построения алгоритмов томографической реконструкции нужно ![]() выразить не через искомую функцию f
(x
), а через исходные данные
выразить не через искомую функцию f
(x
), а через исходные данные ![]() .
.
Итак, перейдем к нахождению ![]() . Мы будем использовать то, что
. Мы будем использовать то, что ![]() является однородной функцией по a фиксированном l . В [95] доказано следующее
является однородной функцией по a фиксированном l . В [95] доказано следующее
Утверждение
: Пусть ![]() есть преобразование Фурье в смысле обобщенных функций от однородной функции
есть преобразование Фурье в смысле обобщенных функций от однородной функции ![]() , тогда
, тогда
 . (2.1.3)
. (2.1.3)
Строгое доказательство требует существенного использования аппарата обобщенных функций, понимаемых как линейные функционалы над соответствующим пространством. Здесь мы ограничимся изложением основных моментов доказательства. В частности, замену переменных в расходящихся интегралах мы будем делать по тем же правилам, что и в обычных.
Представим ![]() в виде
в виде
![]() ,
,
(поскольку параметр l фиксирован, его на данном этапе можно опустить).
Как уже отмечалось выше, интеграл является расходящимся, тем не менее, переходя к сферическим координатам по обычным правилам, получаем:
 ,
,
где b = b (j ,q ) = (cosq cosj , sinq cosj , sinj ), j Î [-p /2, p /2], q Î [0, p ].
Учитывая, что ![]() , а также то, что интегрирование по углам j и q соответствует интегрированию по единичной сфере, приходим к выражению
, а также то, что интегрирование по углам j и q соответствует интегрированию по единичной сфере, приходим к выражению
 .
.
Интеграл по r есть преобразование Фурье от r + +. Используя таблицы для преобразования Фурье обобщенных функций [19], приходим к выражению (2.1.3).
Для действительных функций f
(x
) в формуле (2) нужна мнимая часть ![]() :
:
 .
.
Используя обобщенные функции, сосредоточенные на поверхности [19], получаем следующее следствие:
 .
.
Здесь S
(x ) = {g Î S
2
½
(x , g ) = 0),  v производная по направлению x . Подставляя в (2.1.2) функции
v производная по направлению x . Подставляя в (2.1.2) функции ![]() и
и ![]() , зависящие от параметра l , получаем формулу обращения, пригодную для построения численных алгоритмов:
, зависящие от параметра l , получаем формулу обращения, пригодную для построения численных алгоритмов:
 (2.1.4)
(2.1.4)
Здесь S
(x ) v окружность, являющаяся пересечением единичной сферы и плоскости P(b ). Плоскость P(b ) проходит через начало координат ортогональна вектору b . Символ W (x ) означает интегрирование по окружности. Оператор L
(b , D
) означает дифференцирование функции ![]() в направлении вектора b :
в направлении вектора b :
 ,
,
при этом l , зависящее от b и x , остается фиксированным.
Как и выше, b = b (q , j ) = (cosq cosj , cosq sinj , sinq ), l = l (q , j ) = l (x , b ) такое, что скалярное произведение (x , b ) равно (b , g (l )) и (b , g / (l )).
В формуле (4) используются регулярные функции, и она пригодна для построения численных алгоритмов.
Замечание . А.С. Денисюком независимо и другим методом, без явного использования преобразования Фурье обобщенных функций, получены формулы обращения функции g + в Rn . При n = 3 формулы А.С. Денисюка и формулы, получаемые изложенным способом из формулы Туя, совпадают.
Выше были получены формулы, позволяющие строить численные алгоритмы восстановления функции f (x ) = f (x 1 , x 2 , x 3 ) по ее лучевому преобразованию
Далее мы будем опускать символ f
и использовать обозначение ![]() .
.
При фиксированном S
функция ![]() является функцией в трехмерном пространстве, но в силу ee однородности существуют поверхности, такие что
является функцией в трехмерном пространстве, но в силу ee однородности существуют поверхности, такие что ![]() полностью определяется своими значениями на них (поверхности расположения приемников излучения).
полностью определяется своими значениями на них (поверхности расположения приемников излучения).
Исходные данные в виде функции ![]() удобно использовать, если матрица приемников расположена на сфере. Однако в реальных ситуациях матрицу приемников обычно располагают на плоскости или поверхности цилиндра. В этих случаях удобно использовать несколько иной вид исходных данных.
удобно использовать, если матрица приемников расположена на сфере. Однако в реальных ситуациях матрицу приемников обычно располагают на плоскости или поверхности цилиндра. В этих случаях удобно использовать несколько иной вид исходных данных.
Плоский детектор.
Мы будем предполагать, что для источника, находящегося в точке S = (s1 , s2 , s3 ), исходные данные регистрируются в плоскости P, определяемой уравнением x s1 + y s2 + z s3 = -½S ½ . Плоскость P, определяется следующими условиями:
плоскость P перпендикулярна лучу, соединяющему источник с началом координат;
плоскость P проходит через точку S = (s1 , s2 , s3 .)
Расстояние D между плоскостью регистрации и источником равно удвоенному расстоянию от источника до начала координат. В плоскости регистрации будем использовать прямоугольную систему координат (p 1 , p 2 ), начало которой находится в точке пересечения с лучем, соединяющим источник с точкой (0, 0, 0). Таким образом, если источник находится в точке S = (s1 , s2 , s3 ), то начало системы координат (p 1 , p 2 ) в плоскости наблюдения находится в точке с трехмерными координатами -s1 , -s2 , -s3 = - S.
При реконструкции в конусе лучей наиболее распространенными примерами траекторий источника являются винтовая линия и совокупность двух окружностей лежащих в пересекающихся плоскостях.
Траектория в виде двух окружностей.
Рассмотрим окружность, лежащую в плоскости z =0.
Направление оси p 2 в плоскости регистрации будет совпадать с направлением оси z .
Ось p 1 системы координат возьмем на линии пересечения плоскости регистрации с плоскостью, содержащей окружность, по которой движется источник. Для окончательного определения системы координат необходимо выбрать одно из двух возможных направлений оси p 1 . Если s3 = 0, s1 = r cosl , s2 = r sinl (источник движется в плоскости z =0), то положительный единичный вектор на оси p 1 выберем так, чтобы он совпадал с вектором (cos(l +p /2), sin(l +p /2), 0) = (-sinl , cosl , 0) = (-s2 /½S ½ , s1 /½S ½ , 0).
Точка, имеющая в плоскости регистрации координаты (p 1 , p 2 ), имеет следующие пространственные координаты:
x = -p 1 sinl - r cosl = -p 1 s 2 /½S ½ - s 1 ,
y = p 1 cos l - r sinl = p 1 s 1 /½S ½ - s 2 , z = p 2 .
В случае плоского детектора, исходными данными являются интегралы по лучам, соединяющим точки (p 1 , p 2 ) в плоскости регистрации с источником S .
Регистрируемая функция gr (p 1 , p 2 , l ) есть интеграл от искомой функции f (x ) = f (x 1 , x 2 , x 3 ) вдоль луча исходящего из точки S = (s1 , s2 , s3 ) = (r cosl , r sinl , 0) в направлении точки
P = (-p 1 sin l - r cosl , p 1 cosl - r sinl , p 2 ) = (-p 1 s 2 /½S ½ v s 1 , p 1 s 1 /½S ½ v s 2 , p 2 ).
Интегральная форма регистрируемой функции имеет вид:

При t = 0 луч проходит через точку S = (r cosl , r sinl , 0), при t = 1 v через точку P = (p 1, p 2 ) = (-p 1 sin l - r cosl , p 1 cosl - r sinl , p 2 ).
Итак, мы имеем соотношение между функциями gr
(p
1
, p
2
, l ) и ![]() :
:
![]() ,
,
![]() .
.
Наряду с обозначением gr
(p
1
, p
2
, l ), мы будем использовать обозначения gr
(p
1
, p
2
, S
(l )), gr
(p
1
, p
2
, S
) и gr
(P
, S
) , здесь S
(l ) точка на траектории источника, соответствующая параметру l , P
= (p
1
, p
2
). Мы выразили функцию gr
(p
1
, p
2
, l ) через функцию ![]() = g
+
(x , l ).
= g
+
(x , l ).
В формуле обращения лучевого преобразования используется функция g
+
(x , l ) =![]() для того, чтобы использовать gr
(p
1
, p
2
, l ), регистрируемую в случае плоского детектора, нужно выразить g
+
(x , l ) используя gr
(p
1
, p
2
, l ).
для того, чтобы использовать gr
(p
1
, p
2
, l ), регистрируемую в случае плоского детектора, нужно выразить g
+
(x , l ) используя gr
(p
1
, p
2
, l ).
Для дальнейшего нам потребуются координаты (p 1 , p 2 ) (в системе координат плоскости регистрации) точки пересечения плоскости регистрации данных с лучем (S +tx ) = (s1 + tx 1 , s2 + tx 2 , s3 + tx 3 ). Эти координаты имеют вид:
![]()
![]() .
.
![]() .
.
Теперь мы можем выразить ![]() используя gr
(p
1, p
2, l ):
используя gr
(p
1, p
2, l ):
![]() = g
+ (x , l ) = gr
(2 ½S
(l )½ (s2(l )x 1 v s1(l )x 2) /
= g
+ (x , l ) = gr
(2 ½S
(l )½ (s2(l )x 1 v s1(l )x 2) /![]() , -2½S
(l )½ 2x 3 /
, -2½S
(l )½ 2x 3 /![]() ,l ),
,l ),
если ![]() < 0,
< 0, ![]() = 0, если
= 0, если ![]() ³0.
³0.
Итак, мы имеем следующее соотношение между функциями:
g
+ (P, l ) и ![]() = g
+ (x , l ); P = (p
1, p
2), x = (x
1, x 2, x 3,);
= g
+ (x , l ); P = (p
1, p
2), x = (x
1, x 2, x 3,);
![]() = g
+ (x , l ) =
= g
+ (x , l ) =
= gr
(2 ½S
(l )½ (s2(l )x 1 v s1(l )x 2) /![]() , - 2½S
(l )½ 2x 3 /
, - 2½S
(l )½ 2x 3 /![]() ,l ),
,l ),
если ![]() < 0,
< 0,
![]() = 0, если
= 0, если ![]() ³ 0.
³ 0.
При переходе от функции g
+ (x , l ) = ![]() к функции g
r (P, S
) интегрирование по окружности S
(l ) в трехмерном пространстве заменяется на интегрирование по прямым линиям в плоскости регистрации. Отметим, что формулы обращения лучевого преобразования, использующие интегрирование вдоль прямых в плоскости регистрации.
к функции g
r (P, S
) интегрирование по окружности S
(l ) в трехмерном пространстве заменяется на интегрирование по прямым линиям в плоскости регистрации. Отметим, что формулы обращения лучевого преобразования, использующие интегрирование вдоль прямых в плоскости регистрации.
4.3 Элементы теории обобщенных функций в применении к задачам обращения лучевого преобразования
Обобщенная функция это непрерывный линейный функционал на пространстве К всех функций a (x ), имеющих производные всех порядков и финитный носитель (свой для каждой из функций α (x )). Любая регулярная интегрируемая функция f (x ) задает линейный функционал (f, a ):
 . (2.2.1)
. (2.2.1)
Однако на пространстве функций K существуют непрерывные линейные функционалы, которые не могут быть заданы с помощью регулярных интегрируемых функций, наиболее известными примерами таких функционалов являются δ-функция и ее производные. Другим широко известным примером является функционал, основанный на функции (1/x) d x. Функция 1/x x является регулярной, однако она не является интегрируемой. При задании соответствующего функционала интеграл
 (2.2.2)
(2.2.2)
понимается в смысле главного значения:
 .
.
Такое понимание интеграла используется при определении преобразования Гильберта от функции α (x ) как свертки с функцией 1/x x.
.
Преобразование Гильберта используется, в частности, в одной из формул обращения преобразования Радона в двумерном пространстве. Эта формула обычно приводится в руководствах по компьютерной рентгеновской томографии. Однако метод свертки и обратного проецирования, часто используемый при построении численных алгоритмов томографической реконструкции, основан на несколько другом виде формулы обращения преобразования Радона. В этом методе по существу используется свертка проекционных данных последовательностью функций сходящихся к 1/x x2 в смысле обобщенных функций.
Линейный функционал, соответствующий функции 1/x x2 , или, что то же самое, обобщенная функция 1/x x2 определяется формулой [19]
 (2.2.3)
(2.2.3)
Интеграл в (2.2.3) сходится в обычном смысле для любой функции a (x ) из пространства основных, и даже из более широкого класса, функций.
В формулах обращения преобразования Радона используется свертка данных с функцией 1/x x2 . Свертка обобщенных функций определяется следующим образом.
Пусть заданы два функционала f и g . Действие функционала f *g являющегося их сверткой, на функцию a из пространства основных задается формулой
(f *g , a )= (f x , g y , a (x + y ))). (2.2.4)
Здесь g y означает, что функционал действует на функцию a , как функцию переменной y , а функционал f действует на полученную функцию переменной x . Если функционалы f и g можно задать регулярными функциям, то функционал свертки определенный формулой (2.2.4) можно задать функцией, являющейся сверткой соответствующих функций в обычном смысле.
Здесь следует сделать одно замечание. Даже если функция одной переменной a (t ) имеет финитный носитель, функция двух переменных a (x + y ) не является функцией с финитным носителем. Это означает, что существование функционала f *g для конкретных функционалов f и g или необходимо доказывать. Известно, что для существования функционала свертки, достаточно, чтобы один из функционалов имел финитный носитель.
Если рассматривать задачи томографии, то там с функцией 1/x x2 сворачиваются исходные данные, которые регулярны и имеют финитный носитель. Можно показать также, что необходимая свертка выражается формулой:
S (r , j ) = I (r , j ) * (-1/pr 2 ) =
 (2.2.5)
(2.2.5)
В реальных ситуациях функция I (r , j ) известна в некотором дискретном множестве точек. Для того, чтобы использовать формулу (2.2.4) нужно построить аппроксимацию функции I (r , j ), такую что интеграл в правой части имеет смысл. Интеграл (2.2.4) заведомо сходится, если функция I (r , j ) принадлежит множеству K, то есть имеет финитный носитель и является бесконечно дифференцируемой.
Однако аппроксимация данных бесконечно дифференцируемой функцией может оказаться громоздкой при построении численных алгоритмов. Кроме того, использование бесконечно дифференцируемых функций может приводить к заглаживанию границ областей с резко отличающимися плотностями. Для сходимости интеграла в (2.2.5) достаточно, чтобы функция I (r , j ) имела в каждой точке конечные односторонние производные первого порядка по переменной r . Это позволяет, в частности, использовать кубические сплайны для построения аппроксимации функции I (r , j ).
Основными операциями с обобщенными функциями, используемыми в задачах томографии, являются свертка, дифференцирование и преобразование Фурье. Основная идея определения операций заключается в том, что некоторые свойства функционалов, задаваемых регулярными функциями, берутся за основу при определении соответствующих операций над обобщенными функциями, являющимися линейными функционалами.
На этой основе построено приведенное выше определение свертки. Особенно просто и наглядно этот прием можно продемонстрировать при определении операции дифференцирования обобщенных функций.
Пусть линейный функционал f задается регулярной функцией f (x ) имеющей интегрируемую производную. Для действия производной на функцию a (x ) из пространства основных можно записать равенство
 , (2.2.6)
, (2.2.6)
здесь использовано интегрирование по частям и то, что a (x ) равна нулю вне некоторого конечного интервала.
Приведенное выше свойство берется за основу при определении производной обобщенной функции. Пусть задан функционал f
, его производной называется функционал f
/
, определяемый равенством ![]() . Так как функции из пространства основных бесконечно дифференцируемы, то определение является корректным и обобщенные функции имеют производные любого порядка.
. Так как функции из пространства основных бесконечно дифференцируемы, то определение является корректным и обобщенные функции имеют производные любого порядка.
Перейдем к определению преобразования Фурье в смысле обобщенных функций. В приводившихся выше определениях функции, входящие в пространство основных, были действительными. При определении преобразования Фурье целесообразно в качестве основных рассмотреть комплекснозначные функции.
Пусть K пространство комплексных основных функций (бесконечно дифференцируемых с финитным носителем).
Каждой комплекснозначной локально интегрируемой функции f (x ) ставится в соответствие функционал
 ,
,
![]() комплексно сопряжена с f
(x
), a (x
) Î K.
комплексно сопряжена с f
(x
), a (x
) Î K.
Множество всех линейных непрерывных функционалов на K образует комплексное пространство обобщенных функций K/ . Обозначим через Z - множество функций, являющихся преобразованиями Фурье функций из K.
Преобразованием Фурье элемента f из пространства K называется функционал g на пространстве Z , действующий по формуле
(g , y ) = 2 p (f , a ), (2.2.7)
здесь j такой элемент из K, для которого преобразование Фурье есть y . То есть для того чтобы вычислить действие функционала g на функцию y (l ) из пространства Z , нужно:
найти такую функцию a (x ) из пространства K, преобразованием Фурье, которой является функция y (l );
найти действие функционала f на найденную функцию a (x ).
Пространства основных функций и функционалов над ними выбраны нами так, что оба шага всегда выполнимы.
Здесь следует обратить внимание на то, что обобщенные функции и их преобразования Фурье определяются как линейные функционалы над разными основными пространствами. Причем функции из множества Z, на котором действуют преобразования Фурье, не являются функциями с финитными носителями, но продолжают оставаться бесконечно дифференцируемым. Что позволяет сохранить многие полезные свойства обобщенных функций.
В формулах обращения лучевого преобразования, на которых основаны алгоритмы решения задачах трехмерной компьютерной томографии, используется преобразование Фурье однородных функций. Классическое преобразование Фурье таких функций не существует, преобразование Фурье в формулах понимается в смысле обобщенных функций.
Рассмотрим несколько подробнее этот вопрос с точки зрения возможности построения соответствующих численных алгоритмов в трехмерном пространстве.
Напомним определение лучевого преобразования, которое было дано в предыдущих параграфах.
Лучевым преобразованием функции f (x ) = f (x 1 , x 2 , x 3 ) называется функция
![]() , (2.2.8)
, (2.2.8)
являющаяся интегралом от f (x ) вдоль луча, исходящего из точки S = (s 1 , s 2 , s 3 ) в направлении вектора a = (a 1 , a 2 , a 3 ).
Как уже отмечалось выше, в наряду с функцией ![]() рассматривается функция
рассматривается функция
,
являющаяся интегралом по всей прямой или, что тоже самое, суммой интегралов вдоль лучей из точки S в направлениях a и - a .
Обе функции являются однородными степени -1, то есть для них выполняются равенства
 ,
,  .
.
Отметим также, что ![]() является четной, а функция
является четной, а функция ![]() таковой не является.
таковой не является.
Понятие однородности степени l можно естественным образом расширить на обобщенные функции, если взять за основу равенство g (g x ) = g l g (x ). В терминах действия на основную функцию j равенство запишется в виде (g , j (x /g ) = g l +n (g , j (x )), здесь g v любое вещественное число большее нуля, n n - размерность пространства, в котором заданы основные функции. В интегральном представлении обобщенных функций показатель n возникает при соответствующей замене переменных в dx .
Известно, что преобразование Фурье однородной обобщенной функции, тоже является однородной обобщенной функцией.
Для интегрируемых, ограниченных и имеющих ограниченный носитель, функций f
их лучевое преобразование является регулярной однородной функцией. Из результатов работ следует, что в трехмерном пространстве преобразование Фурье таких функций, понимаемое в обобщенном смысле, задается регулярной функцией. Регулярная однородная функция задается своими значениями на единичной сфере. Таким образом, в практических ситуациях при инвертировании лучевого преобразования нас интересует соотношение между двумя функциями. Одна из них является сужением на единичную сферу лучевого преобразования, а другая - сужением на единичную сферу преобразование Фурье лучевых данных, понимаемого в смысле обобщенных функций. Подобное преобразование между функциями, заданными на единичной сфере естественно назвать преобразованием Семянистого, поскольку в его работе впервые получены подобные соотношения для симметричных однородных функций в n
-мерных пространствах. Как уже отмечалось выше, функция ![]() не является симметричной, для нее соответствующие соотношения для функций на единичных сферах в трехмерном пространстве были получены в предыдущих параграфах.
не является симметричной, для нее соответствующие соотношения для функций на единичных сферах в трехмерном пространстве были получены в предыдущих параграфах.
Ранее были рассмотрены формулы обращения лучевого преобразования, основанные на явном использовании обобщенных функций, и приемы, позволяющие приводить эти формулы к виду удобному для построения численных алгоритмов.
К выводу формул обращения лучевого преобразования есть другой подход, не использующий обобщенные функции в явном виде. Мы покажем здесь, что фактически этот метод тоже основан на использовании преобразования Фурье в смысле обобщенных функций.
Лучевыми данными называется функция
 ,
,
Ф = (Ф1
, Ф2
, Ф3
) Î R3
, b Î S
2
(S
2
v единичная сфера). (Не трудно видеть, что в наших обозначениях это функция ![]() ).
).
В формулах обращения используются следующие функции:
 (2.2.9)
(2.2.9)
 , (2.2.10)
, (2.2.10)
(S
2
/2 - половина единичной сферы), ![]() - скалярное произведение векторов
- скалярное произведение векторов ![]() и
и ![]() .
.
Формулы обращения в имеет вид
 , (2.2.11)
, (2.2.11)
где ![]() , R v радиус шара, в котором содержится носитель функции f
(х
),
, R v радиус шара, в котором содержится носитель функции f
(х
), ![]() -элемент поверхности на единичной сфере.
-элемент поверхности на единичной сфере.
Если для любого l , такого, что ½l ½ < R и любого b Î S 2 /2 существует точка Ф на траектории источника такая, что Ф × b = l (выполняются условия Кириллова-Туя), то формула (2.2.11) может быть использована для определения функции f (х ).
В отмечается, что функция F при трехмерной томографической реконструкции в конусе лучей в определенной степени аналогична роли преобразования Фурье в двумерной томографии. Этот факт не является случайным.
Действительно, в показано, преобразование Фурье по b в смысле обобщенных функций от функции g (b , Ф) имеет вид
 . (2.2.12)
. (2.2.12)
Знаменатель в (2.2.12) может быть равен нулю, и (2.2.12) следует понимать в смысле обобщенных функций. В доказано следующее утверждение.
Если f j Î C2 , то
 . (2.2.13)
. (2.2.13)
Учитывая (2.2.13), (2.2.12) и (2.2.10) мы видим, что функция ![]() , является преобразованием Фурье в смысле обобщенных функций функции g
(b , F ), а функция F
в формуле обращения определяется функцией
, является преобразованием Фурье в смысле обобщенных функций функции g
(b , F ), а функция F
в формуле обращения определяется функцией ![]() .
.
4.4. Соотношения между преобразованиями Радона, Фурье и лучевым преобразованием.
В предыдущих параграфах были рассмотрены формулы непосредственного обращения лучевого преобразования. Существуют также методы томографической реконструкции, основанные на предварительном вычислении преобразования Фурье искомой функции или ее преобразования Радона. Как уже отмечалось ранее, в случае двух переменных лучевое преобразование и преобразование Радона совпадают. В трехмерном пространстве v это разные преобразования.
Для понимания сути методов томографии весьма полезны соотношения между различными видами преобразований. Многие такие соотношения можно получить в пространствах любой размерности. Однако здесь мы будем, как правило, рассматривать практически важные случаи двух и трех переменных.
Соотношение между преобразованиями Радона и Фурье.
Пусть ![]() - преобразование Фурье функции f
(x
1
, x
2
, x
3
):
- преобразование Фурье функции f
(x
1
, x
2
, x
3
):
![]() .
.
Интегрируя сначала при фиксированном p по плоскости l 1 x 1 + l 2 x 2 + l 3 x 3 = p , а затем по p приходим к хорошо известному выражению, связывающему преобразования Фурье и Радона
![]() . (2.3.1)
. (2.3.1)
Соотношение между преобразованием Радона и преобразованием Фурье лучевых данных.
В [21] предложен способ инвертирования лучевого преобразования, основанный на том, что по исходным данным восстанавливается преобразование Радона функции f (x )
![]() ,
,
что позволяет по известным формулам восстановить f (x ).
При выводе формул обращения в работе используется функция
 . (2.3.2)
. (2.3.2)
Можно показать что для функций ![]() и
и ![]() справедливо соотношение
справедливо соотношение
![]() , (2.3.3)
, (2.3.3)
здесь С v некоторая константа. Равенства (2.3.2) и (2.3.3) дают связь между преобразованием Радона и лучевым преобразованием в трехмерном пространстве:
 , (2.3.4)
, (2.3.4)
Отметим также, что поскольку
![]() ,
, ![]() . Равенство (2.3.4) может быть записано в виде
. Равенство (2.3.4) может быть записано в виде ![]() . Из последнего равенства и определения функции
. Из последнего равенства и определения функции ![]() следует, что
следует, что ![]() функция x
постоянна на плоскостях, ортогональных вектору x , так как для всех x
, принадлежащих такой плоскости, скалярное произведение (x
, x ) равно константе. Этот факт лежит в основе многих методов обращения лучевого преобразования. Это утверждение получено в [40], для случая комплексных пространств. Для действительных пространств это утверждение содержится в работах. Оно и может быть использовано для восстановления функции
функция x
постоянна на плоскостях, ортогональных вектору x , так как для всех x
, принадлежащих такой плоскости, скалярное произведение (x
, x ) равно константе. Этот факт лежит в основе многих методов обращения лучевого преобразования. Это утверждение получено в [40], для случая комплексных пространств. Для действительных пространств это утверждение содержится в работах. Оно и может быть использовано для восстановления функции ![]() в точках x,
принадлежащих области D
, по значениям на ее границах.
в точках x,
принадлежащих области D
, по значениям на ее границах.
Соотношение между преобразованием Фурье лучевых данных и преобразованием Фурье искомой функции f( x).
В работе получено равенство:
 , (2.3.5)
, (2.3.5)
устанавливающее связь между преобразованием Фурье лучевых данных и преобразованием Фурье самой функции f , преобразование Фурье понимается в смысле обобщенных функций. Для того, чтобы использовать эту формулу для нахождения функции f нужно иметь формулы для вычисления обобщенного преобразования Фурье по лучевым данным. Такие формулы были приведены выше.
В заключение, хотелось бы сказать, что раскрытие того множества вопросов, затронутых в данной работе, можно бы было продолжать ещё очень долго, так что ряд тем представлены несколько ужато. Особый интерес представляло изучение именно технической (физической, если угодно) стороны компьютерной томографии, как метода диагностики. Замечаний к работе может, в принципе, возникнуть много, однако надеюсь на несколько снисходительное отношение – сроки были сжатые, вопрос – обширный (да и сам процесс написания прерывался - пошуровал в компьютере win95.cih).
5. ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА.
1.Розенштраух Л.С. Невидимое стало зримым (успехи и проблемы лучевой диагностики).- М.: Знание, 1987.- 64 с.
2.Томография грудной клетки / Помозгов А.И., Терновой С.К., Бабий Я.С., Лепихин Н.М. - К.:Здоровья,1992.- 288 с.
3. Компьютерная томография мозга. Верещагин Н.В., Брагина Л.К., Вавилов С.Б., Левина Г.Я.-М.:Медицина,1986.-256 с.
4. Коновалов А.Н., Корниенко В.Н. Компьютерная томография в нейрохирургической клинике.-
М.: Медицина,1988. - 346 с.
5. Физика визуализации изображений в медицине: В 2-х томах.
Т.1:Пер. с англ./Под ред. С.Уэбба.-М.:Мир,1991.- 408 с.
6. Антонов А.О., Антонов О.С.,Лыткин С.А.//Мед.техника.-1995.- № 3 - с.3-6
7. Беликова Т.П.,Лапшин В.В.,Яшунская Н.И.//Мед.техника.-1995.- № 1-с.7