| Скачать .docx |
Реферат: Гибкие производственные системы изготовления деталей ЭА
Контрольная работа по теме:
ГИБКИЕ ПРОИЗВОДСТВЕННЫЕ СИСТЕМЫ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ЭА
1. ГПС изготовления заготовок деталей эа
В общем объеме трудовых затрат на изготовление изделий ЭА ТП изготовления деталей методами формообразования занимают в среднем 35-45 %. «более существенные успехи в области создания ГПС различного иерархического уровня приходятся в основном именно на эти ТП.
В данной главе последовательно рассмотрим состав, структуру, профункционирования ГПС, реализующих заготовительные ТП, ТП механообработки, ТП нанесения гальванических покрытий, термические и сварные ТП (рис. 1).
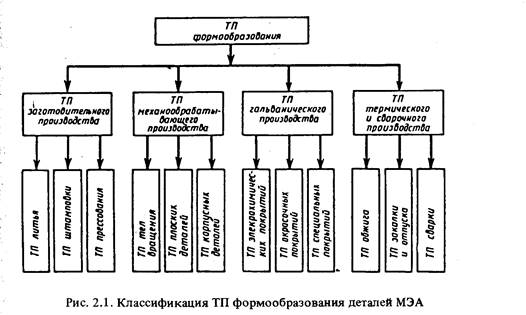
Рис. 1 – Классификация ТП формообразования деталей ЭА
Для всех ГПМ заготовительного производства (в отличие от всех других видов производств) характерной особенностью является тот факт, что каждый ПР обслуживает только одну технологическую машину.
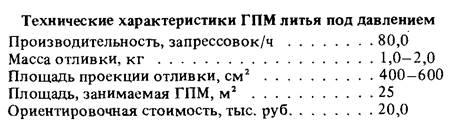
Особенности и основные факторы, определяющие типовую компоновку ГПМ литья под давлением (и его возможные модификации) обусловливаются серийностью и номенклатурой отливок, технологическим циклом и параметрами получения отливок на машинах литья под давлением (МЛД), видов применяемых ПР для заливки металла, смазки пресс-форм и пресс-камер, способов снятия отливок после литья и обрубки. В зависимости от состава и принятых решений по разгрузке МЛД типовые ГПМ литья под давлением подразделяются на следующие исполнения: с применением горизонтальных или вертикальных прессов; со сбросом отливок в тару или на транспортер; с транспортерами-съемщиками, снабженными заливочными стержнями. Например, для автоматизации процесса изготовления отливок из цветных металлов и сплавов типовым ГПМ литья под давлением является модель 2 Л.
Состав и структура указанного ГПМ, построенного на разгрузке МЛД ПР и укладке отливок в тару, представлены на рис 2.
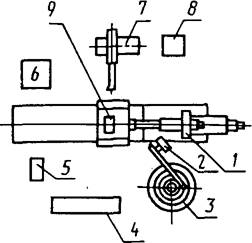
Рис. 2 - ГПМ литья под давлением: 1 - МЛД; 2 - ПР для заливки металла; 3 - печь раздаточная; 4 - система управления; 5 - стенд контроля технологических параметров; 6 - установка термостатирования; 7 - ПР для съема отливок; 8 - приемно-выдающее устройство (тара для отливок); 9 - устройство смазки

Рис. 3 - ГПМ холодной штамповки: 1 - ПР; 2 - пресс; 3 - штамп; 4 - система автоматического удаления штампуемой детали; 5 - система управления (СУ) модулем; б - по дающее устройство шиберного типа
Основными факторами и особенностями, определяющими состав и структуру ГПМ холодной штамповки, являются: операционность деталей; непрерывность или прерывистость ТП, т.е. наличие вспомогательных технологических операций, требующих удаления детали с позиции обработки на другие производственные участки (отжиг, очистка, промывка); серийность; программа выпуска деталей; количество запуска деталей в определенный период; изменения формы заготовок в процессе обработки. ГПМ холодной штамповки включает в свой состав различные типы; ПР: „Ритм-01", „Циклон 5.01", „Универсал-15.06" и др. (рис. 3). Например, ГПМ холодной штамповки на основе ПР „РФ-202" компонуется в сочетании с прессами открытого типа с усилием от 61 до 245 кН. Он служит для однооперационной штамповки деталей массой до 0,5 кг. Модули оснащаются подающими устройствами (например, шиберными), обеспечивающими его непрерывную работу.
Типовым ГПС холодной штамповки является модель с применением ПР „Ритм-01", предназначенная для автоматизации процесса холодной штамповки деталей из штучных плоских заготовок.
2. ГПЛ холодной штамповки
Рассмотрим существующие в практике приборостроительных предприятий ГПС холодной штамповки (листовой, объемной), чаще всего реализованные в виде ГПЛ холодной штамповки.
Краткая конструкторско-технологическая характеристика деталей, изготавливаемых холодной штамповкой. В приборостроении многие заготовки и детали получают холодной штамповкой из листового, полосового или ленточного материалов: стали, латуни, томпака, нейзильбера, гетинакса, органического стекла и др. Холодная штамповка - один из самых прогрессивных методов получения деталей и заготовок. Она позволяет получать детали (рис. 4) и заготовки сложной конструкции и формы 7-8-го квалитета, шероховатостью Rz 10 - Rzl6, толщиной 0,1-3,0 мм с высоким коэффициентом использования материала и низкой себестоимостью благодаря высокой производительности штамповочных операций.

Рис. 4 - Пример детали, выполненной методом холодной штамповки
Примечания:
1. Размеры для справок.
2. Риску гравировать.
3. Ширина риски 0,2 мм.
4. Покрытие: АН. Оке. хр.; поверхность А - эмаль ПФ-115 белая 111.В2; гравировки - эмаль ПФ-115 черная В2.
5. Остальные технические требования - по ОСТ 4.ГО.070.014.
Операции холодной штамповки делятся на три основных группы:
1. разделительные операции (деформации с местным разрушением материала: отрезка, вырезка, пробивка, подрезка, разрезка, обрезка, зачистка, просечка);
2. формоизменяющие операции (пластические деформации материала), когда плоские или пространственные заготовки превращаются в требуемую деталь, в число которых входят: гибка, вытяжка, формовка, объемная штамповка и др.;
3. штампо-сборочные операции, при которых несколько деталей соединяются в сборочные единицы на прессах или на специальных станках в приспособлениях.
Укрупненная типовая схема технологического маршрута получения штампованной детали включает в свой состав следующие операции:
· подача листа для резки на пресс-позициях; складирование полос после резки в стопы или кассеты;
· транспортирование стоп (кассет) к прессам; загрузку - разгрузку штампа;
· выполнение операции штамповки;
· межоперационные и межштамповые перемещения штамповок; межстаночные перемещения штамповок;
· складирование штамповок.
Состав оборудования, приспособлений и инструмента, применяемого в ГПЛ холодной штамповки. При выполнении штамповочных работ применяют три группы оборудования:
· заготовительное (например, ножницы гильотинные для резки на полосы листового материала);
· основное технологическое (приводные прессы: механические, гидравлические, пневматические, электромагнитные; прессы-автоматы);
· вспомогательное (например, механизмы подачи лент или штучных заготовок в пресс).
В качестве оснастки (приспособлений и инструмента) при холодной штамповке используют: штампы, которые в зависимости от ряда выполняемых операций, технологии изготовления деталей и степени сложности конструкции штампа, классифицируются на простые, комбинированные, универсальные: схваты ПР различной конфигурации, обеспечивающие установку заготовки в штамп и съем из штампа готовой детали.
Применение ПР в составе ГПЛ холодной штамповки резко изменяет существующие конструкции штампов. Это связано в первую очередь с требованиями точной фиксации штампа до и после рабочего хода пресса, требованиями удаления отходов после каждого цикла или после серии циклов и т.д.
Общие требования при проведении работ по подготовке штампов в ГПЛ холодной штамповки следующие:
1. при раскрытии штампа (после I окончания процесса формообразования) деталь должна оставаться в его 1; нижней части, не теряя ориентации; штамп должен иметь автоматические выталкиватели для подъема из матрицы отштампованной детали и съема ее с фиксаторов;
2. выталкивание отштампованной детали должно быть плавным и происходить без смещения детали в горизонтальной плоскости;
3. фиксаторы и ловители должны обеспечивать правильность положения заготовки в штампе при установке ее с точностью не ниже точности позиционирования ПР;
4. конструкция штампа (для разделительных операций) должна исключать возможность запрессовки отхода в деталь или детали в отход;
5. штамп должен иметь автоматические устройства для удаления отходов из внутренних полостей или предусматривать возможность автономной установки таких устройств;
6. если направляющие колонки мешают загрузке или разгрузке, то их следует устанавливать на верхней части штампа.

Рис. 5 - Структурная схема ГПЛ холодной штамповки на основе универсальных ПР: I - пресс двухстоечный; 2, У - ПР; 3 - подающее устройство; 4 - тара для штамповки; 5 - тара для высечки; 6 - штамп; 7 - роботизированная транспортная система (РТА); 8 - СПУ ПР- 99'-ПР.
Структура и процесс функционирования ГПЛ холодной штамповки. На рис. 5 показана структура (компоновочная схема) ГПЛ холодной штамповки на основе универсальных ПР типа РПМ-25 и прессов типа КД 2126. Такая структура ГПЛ обеспечивает наименьшее количество движений исполнительных органов, учитывает возможность наблюдения оператором за ходом ТП. Процесс функционирования ГПЛ следующий.
После проведения необходимых работ по техническому обслуживанию роботов и оборудования, установки требуемой штамповой оснастки на прессах и заполнения накопителя заготовками комплекс готов к функционированию. Подается электро- и пневмопитание линии, последовательно включаются прессы 1 и ПР 2,2' и 9,9'. В начальном положении исполнительные органы роботов 2 ц 2' подняты, вакуумный схват робота 2 ориентирован над заготовками в вертикальном магазине накопителя 3. Отрабатывая заданную программу, исполнительный орган робота 2 опускается и вакуумным схватом берет заготовку из накопителя и подает в зону пресса 1, при этом нажимной элемент накопителя замыкает кнопку пуска пресса и происходит штамповка детали в первом цикле. После подъема исполнительного органа пресса вакуумный схват робота 2' схватывает формообразованную деталь из штампа пресса. После этого следует поворот механической руки робота, вакуумный схват ориентируется над транспортным роботом 7 и деталь укладывается в исходное положение. Затем вакуумный схват робота 9 берет деталь у РТА 7 и подает в зону штампа пресса 1 для выполнения операции штамповки по второму технологическому циклу. Окончательно отформованную деталь вакуумный схват робота 9 захватывает и укладывает в тару 4. Общий цикл штамповки - 8 с.
В крупносерийном производстве стали уже традиционными ГПЛ штамповки на базе цикловых и позиционных ПР и прессового оборудования, в ряде случаев объединенных в участки транспортными системами.
На оборудовании с ЧПУ для обработки листового материала в последнее время все чаще используют комбинированные методы изготовления детали. В состав такого оборудования включают наряду с прессом, оснащенным штампом, или вместо пресса установки для лазерной или плазменной резки. Прессы дополняют сверлильными и фрезерными головками. Использование лазеров позволяет получить в условиях мелкосерийного производства контуры сложной конфигурации без изготовления специальных штампов. Такие ГПЛ доукомплектовываются листогибочным, сварочным, транспортно-накопительным оборудованием. Детали в них проходят операции раскроя, штамповки, лазерной и плазменной обработки. Магазины с инструментом доставляет тележка. Хранение и перемещение листов и деталей осуществляется на складе.
Автоматизированная система управления ГПЛ холодной штамповки (рис. 6) имеет двухуровневую иерархическую структуру, включающую: управляющую ЭВМ первого уровня (управление транспортно-накопительной системой и ЧПУ станков); ЭВМ (микро-ЭВМ), используемой в качестве локального устройства управления ЧПУ ПР и прессов. Система управления (см. рис. 6) ГПЛ холодной штамповки, построенная по модульному принципу, позволяет обеспечить гибкость, универсальность, возможность наращивания модулей, снизить затраты на проектирование и ремонт системы управления, повысить технологичность изготовления системы управления.
Модуль процессора является основным модулем в системе управления. Он выполняет функции управления системой, производит необходимые арифметические и логические операции.
Модуль ПЗУ предназначен для хранения управляющей программы (программы работ системы управления) и некоторых констант. Для работы системы по методу циклового управления управляющая программа занимает объем ПЗУ не более 2 кбайт.
Модуль ОЗУ предназначен для хранения переменных данных и промежуточных результатов. Для цикловой системы управления достаточно иметь ОЗУ емкостью 256 байт.
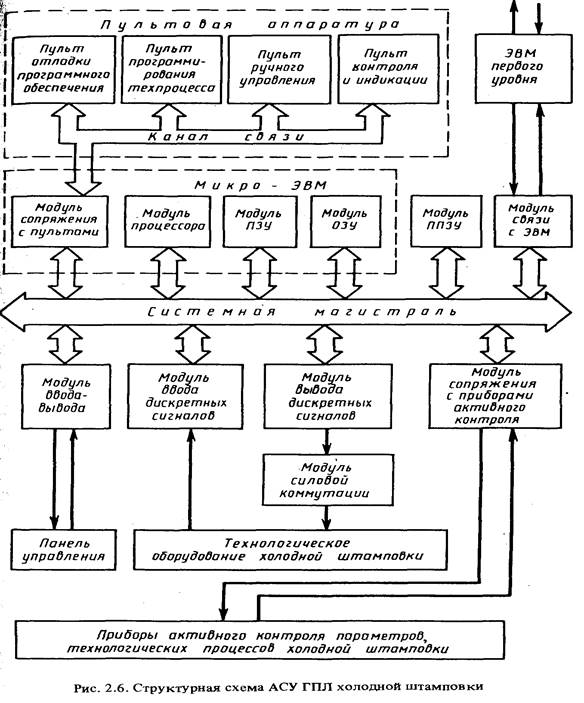
Рис 6 - Структурная схема АСУ ГПЛ холодной штамповки
Модуль ППЗУ предназначен для хранения рабочей программы (циклограммы работы технологического оборудования) (рис. 6). Эта программа представляет собой последовательность команд на технологическое оборудование, выдаваемое системой управления (с учетом ответных сигналов). Объем ППЗУ определяется количеством каналов ввода (вывода), количеством команд в цикле работы оборудования и сложностью блокировок при формировании команд. Для системы управления, имеющей 64 канала ввода, 64 канала вывода, обеспечивающих до восьми блокировок перед выдачей команды и до 100 команд в цикле работы технологического оборудования, необходимо иметь ППЗУ емкостью не более 2 кбайт.
Модули ввода-вывода служат для связи логической части системы управления с технологическим оборудованием. Посредством этих модулей происходит ввод сигналов с датчиков оборудования, определяющих состояние последних, и выдача на оборудование управляющих команд. Количество данных модулей в системе управления определяется количеством каналов ввода-вывода.
Пультовая аппаратура служит для отладки и контроля как системы управления, так и отладки и контроля хода работы технологического оборудования. Пульт отладки программного обеспечения предназначен для работы собственно системы управления. Пульт программирования технологического процесса служит для оперативного изменения программы работы (циклограммы) технологического оборудования. Программирование осуществляется в знаках (символах), удобных для оператора, и не требует от него знания специальных языков программирования, а потребителю при использовании системы управления не требуется иметь специальных отладочных средств.
Пульт ручного управления обеспечивает работу технологического комплекса в ручном режиме работы при проведении наладочных и ремонтно-восстановительных работ. Пульт контроля и индикации предназначен для визуального контроля за ходом технологического процесса. Пультовая аппаратура при отлаженном комплексе может отключаться от системы управления, поставляться потребителю с системой управления или нет в зависимости от его пожеланий, и специфики работы комплекса.
Связь микро-ЭВМ с технологическим оборудованием осуществляется рез модули ввода-вывода дискретных сигналов и силовой коммутации, : приборами активного контроля параметров ТП - через модуль сопряжения, с панелью управления - через модуль ввода-вывода.
Список литературы
1. Н.П. Меткин, М.С. Лапин, С.А. Клейменов, В.М. Критський Гибкие производственные системы. – М.: Издательство стандартов, 1989. – 309 с.
2. Харченко А.О. Станки с ЧПУ и оборудование гибких производственных систем: Учебное пособие для студентов вузов. – К.: ИД «Профессионал», 2004. – 304 с.
3. Роботизированные технологические комплексы/ Г.И. Костюк, О.О. Баранов, И.Г. Левченко, В.А. Фадеев – Учеб. Пособие. – Харьков. Нац. аэрокосмический университет «ХАИ», 2003. – 214 с.
4. Алексеев П.И., Н.П. Меткин, М.С. Лапин. Технологическое проектирование ГПС. – Л.: ЛДНТП, 1984. – 36 с.
5. Проектирование металлорежущих станков и станочных систем: Справочник-учебник в 3-х т. Т. 3: Проектирование станочных систем /Под общей ред. А.С. Проникова - М.: Изд-во МГТУ им. Н.Э. Баумана; Изд-во МГТУ «Станкин», 2000. - 584 с.
6. Гибкие производственные комплексы /под. ред. П.Н. Белянина. – М.: Машиностроение, 1984. – 384 с.
7. Гибкое автоматическое производство/под. ред. С.А. Майорова. – М.: Машиностроение, 1985. – 456 с.
8. Иванов А.А. ГПС в приборостроении. – М.: Машиностроение,1988. – 282 с.
9. Морозов В.П., Дымарский Я.С. Элементы теории управления ГАП. – Л.: Машиностроение, 1984. – 364 с.