| Скачать .docx |
Курсовая работа: Курсовая работа: Проектирование механизма поворота и отсчета аттенюатора
Московский ордена Ленина, ордена Октябрьской Революции и ордена Трудового Красного Знамени
Государственный Технический Университет им. Н.Э. Баумана
Калужский филиал
РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовому проекту на тему:
Проектирование механизма поворота и отсчета аттенюатора
Калуга
Содержание
1. Задание на проектирование
2. Цель и назначение изделия
3. Проектирование кинематической схемы
4. Описание конструкции
5. Расчёт спиральной многооборотной шкалы
6. Описание конструкции шкалы
7. Расчёт червячной передачи
8. Выбор диаметра вала-червяка
9. Выбор подшипников для вала-червяка
10. Выбор подшипников для подвижного волновода
Литература
Приложения
1. Задание на проектирование
Тема задания: разработать конструкцию механизма поворота поглощающей пластины П центрального волновода 2 поляризационного аттенюатора в сочетании с отчетным устройством по кинематической схеме, исходным данным и следующим техническим требованиям:
1. Затухание сигнала в волноводе 3 обеспечить поворотом волновода 2 с пластиной П на угол от Q = 0 до Q = Qmax
2. Пластину П изготовить из двойного слоя слюды, толщиной 0.25 мм с нанесением поглощающего слоя из графита.
3. Отверстия входного и выходного волноводов выполнить прямоугольными с размерами 18´28 мм. На концах предусмотреть контактные фланцы.
4. Соединение центрального подвижного волновода с неподвижным выполнить дроссельными фланцами.
5. Для улучшения электрических характеристик контура контактные и токопроводящие поверхности серебрить.
2. Цель и назначение изделия. Описание принципа действия
Для уменьшения мощности в известное число раз используются приборы, называемые аттенюаторами. Они применяются в различных измерительных приборах, например, в генераторах малых мощностей. Аттенюатор любого типа характеризуется вносимым в тракт затуханием, т.е. отношением мощностей на входе и выходе.
В радиотехническом диапазоне волн применяются аттенюаторы различных типов, в том числе аттенюаторы, обеспечивающие затухание за счёт поглощения мощности материалом, помещённым в электромагнитное поле. Они бывают коаксиальные и волноводные. Схема аттенюатора для круглого волновода, возбуждаемого волной Н1, показана на рисунке 1.
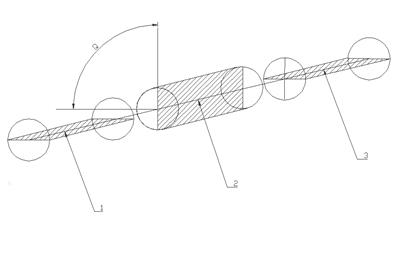
Рис. 1.
Здесь 1 и 3 – неподвижные участки волновода, 2 – его вращающийся участок. Когда все три поглощающие пластины П лежат в одной плоскости, то затухание близко к нулю. По мере поворота поглощающей пластины во вращающейся части волновода затухание на выходном конце волновода увеличивается. Принцип возникновения затухания показан на рисунке 2.
 |
Рис. 2.
Вектор напряжённости поля Е может быть разложен на составляющую EsinQ в плоскости пластины и составляющую EcosQ, перпендикулярную ей. На выходе средней секции волновода составляющая EsinQ не пропускается. Прошедшая составляющая EcosQ в неподвижной третьей секции восстанавливает первоначальную поляризацию, образуя составляющие Еcos2 Q и EsinQ EcosQ, на выходе соседней секции остаётся только составляющая Еcos2 Q. Затухание такого аттенюатора определяется выражением:
А = М lg cosQ,
где М – постоянная затухания.
3. Проектирование кинематической схемы
Кинематическая схема должна обеспечивать поворот подвижной части волновода 2 (см. чертежи) с поглощающей пластиной П относительно неподвижных участков 1 и 3. Её поворот на угол Q осуществляется с помощью рукоятки 5, которая управляет червячной передачей Z1 - Z2 . Червячное колесо закреплено при этом на подвижном участке волновода. Отсчёт затухания будем вести по шкале 4. График функции затухания А = М lg cosQ показан на рисунке 3.
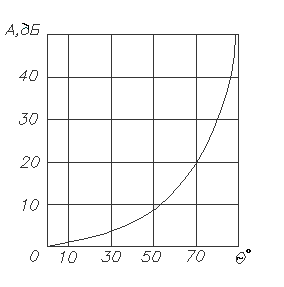 |
Рис. 3.
4. Описание конструкции
Аттенюатор состоит из корпуса, отлитого из магниевого сплава МЛ5, соединённого фланцами с входным и выходным волноводами. Внутри корпуса на шариковых подшипниках вращается подвижный волновод с поглощающей пластиной. Её вращение осуществляется от ручки настройки с помощью червячной передачи, состоящей из червяка и червячного колеса, насаженного на наружную поверхность подвижного волновода. Поглощающие пластины из слюды с графитовым покрытием установлены также в неподвижных волноводах. Шкала отчетного устройства многооборотная и закреплена на оси червяка. Соединение волноводов бесконтактное, дроссельного типа. Для уменьшения излучения в зазоре в волноводном тракте установлены поглощающие шайбы. Шайбы фиксируются на волноводе с помощью стопорных колец. Так как частота внутренней поверхности волновода сильно влияет на величину затухания, чистоту поверхности назначают не хуже Ra = 0.32 с последующим серебрением. Поглощающие пластины изготовлены из двух слоёв слюды, толщиной 0.25 мм с нанесённым на их внешнюю поверхность поглощающего слоя из графита. Передаточное число червячной передачи u = 12, заходность червяка Z1 = 4, число зубьев на колесе Z2 = 48, модуль зацепления m = 1 мм.
5. Расчёт спиральной многооборотной шкалы
Исходные данные для расчёта: Тема №8 Вариант№5
1. Постоянная затухания М = -45
2. Наибольшая относительная погрешность настройки
e = 0,5 для 0 <Q< 45о
e = 2,0 для 45о <Q<Qmax
3. Диапазон затухания
Аmin = 0 Дб Аmax = 70 Дб
4. Внутренний диаметр центрального волновода
dв = 32 мм
5. Диаметр шкалы (начало оцифровки) отсчётного устройства
Dш = 150 мм
Порядок расчёта:
1. Определяем угол поворота элемента настройки, соответствующий наибольшему затуханию
Qmax = arccos 10Amax / M
Qmax = arccos 1070/ -45 = 88,384°
2. Расчёт для относительной погрешности
e = 0.5 при 0 <Q< 45о
2.1 Находим угол поворота элемента настройки, соответствующий заданной величине абсолютной погрешности DА, исходя из
A1 = Amax – 2*DA = Amax –2*e *Amax /100% =70 - 2 * 0,5 * 70 / 100 = 69,3Дб
Q1 = arccos 10A1 / M = arccos 1069,3/-45 = 88,347°
2.2 Выбираем допустимую погрешность перемещения на ручке настройки из условия
[djn ] = 1...1.5o . Полагаем [djn ] = 1о .
2.3 Расчитаем величину коэффициента замедления
i = [djn ] / djn = [djn ] / (Qmax - Q1 ) = 1 / (88,384-88,347) = 37
3 Проводим расчёт шкалы, исходя из длины деления
[b] = 1...1.5мм. Положим [b] = 1.5мм
3.1 Цена деления
H = 2*DA=2*Amax *e/100 = 2*70*0.5/100 = 0,7Дб
3.2 Число делений шкалы
N = A/H = 70 / 0.7 = 100
3.3 Число оборотов шкалы при угле поворота элемента настройки
Qmax = 88,384°
K = Qmax i/2p = 88,384*37/360=9,08
Число делений на каждом обороте
N’ = N / K = 100/ 9,08= 11,01
3.4 Наименьшая длина деления шкалы при наибольшем радиусе шкалы
Ro = Dш / 2 =150/2=75 мм
и далее очерченной дугами окружностей будет на каждом полувитке
bk ’=2pRm / N’= 2p(Ro – (t/4)*m) / N’
где t – шаг спирали шкалы
t = 4 мм
b1 = 2p(75 – 1*1)/11,01= 42,02
b2 = 2p(75 – 1*3)/11,01 = 41,07
b3 = 2p(75 – 1*5)/11,01 = 39,93
b4 = 2p(75 – 1*7)/11,01 = 38,9
b5 = 2p(75 – 1*9)/11,01 = 37,65
b6 = 2p(75 – 1*11)/11,01 = 36,5
3.5 Расчёт произведён правильно, т.к. bk >[b]
4. Расчёт для относительной погрешности
e = 2 при 45о <Q<Qmax
4.1 Находим угол поворота элемента настройки, соответствующий заданной величине абсолютной погрешности DА, исходя
A1 = Amax – 2*DA = Amax –2*e* Amax /100% = 70 - 2 * 2 * 70 / 100 = 67,2 Дб
Q1 = arccos 10A 1 / M = arccos 1067,2 / -45 = 88,161°
4.2 Выбираем допустимую погрешность перемещения на ручке настройки из условия [djn ] = 1...1.5o . Полагаем [djn ] = 1о .
4.3 Расчитаем величину коэффициента замедления
i = [djn ] / djn = [djn ] / (Qmax - Q1 ) = 1 / (88,384-88,161) = 2,23
4.4 Проводим расчёт шкалы, исходя из длины деления
[b] = 1...1.5мм. Положим [b] = 1.5мм
4.5 Цена деления
H = 2*DA=2*Amax *e/100 = 2*70*2/100 = 2.8Дб
4.6 Число делений шкалы
N = A/H = 70 / 2,8 = 25
4.7 Число оборотов шкалы при угле поворота элемента настройки
Qmax = 88,384°
K = Qmax i/2p = 88,384*2,23/360=0,55
4.8 Число делений на каждом обороте
N’ = N / K = 25 / 0,55 = 45,4
4.9 Наименьшая длина деления шкалы при наибольшем радиусе шкалы
Ro = Dш / 2 =150/2=75 мм
и далее очерченной дугами окружностей будет на каждом полувитке
bk ’=2pRm / N’= 2p(Ro – (t/4)*m) / N’
где t – шаг спирали шкалы
b1 = 2p(75 – 2*1)/45,4 = 10,1
b2 = 2p(75 – 2*3)/45,4 = 9,5
b3 = 2p(75 – 2*5)/45,4 = 8,9
b4 = 2p(75 – 2*7)/45,4 = 8,4
b5 = 2p(75 – 2*9)/45,4 =7,9
b6 = 2p(75 – 2*11)/45,4 = 7,3
и далее очерченной дугами окружностей будет на каждом полувитке
где t – шаг спирали шкалы
t = 8 мм
4.10 Расчёт произведён правильно, т.к. bk >[b], где [b] = 1.5мм
6. Описание конструкции шкалы
Конструкция отчетного устройства с многооборотной шкалой в основном аналогична отчетному устройству с однооборотной шкалой. Отличие состоит в кинематической связи между вращением шкалы 1 и перемещением указателя 2 в радиальном направлении за один оборот шкалы, которое равно одному шагу спирали. Это обеспечивается вхождением выступов с одной стороны указателя в прорезь спирали шкалы, а выступа с другой стороны указателя в направляющие 3 держателя шкалы (рис. 4).
Шкалу со спиралью изготавливают из металла, шкалу изготавливают из оргстекла. На оргстекло наносим оцифровку. Надписи на шкале
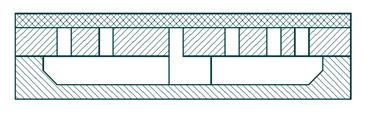 |
Рис.4
выполняем шрифтом по ГОСТ 2930-62. Технические требования к конструкции шкалы
1. Число делений шкалы – 125. Шкала содержит 37 главных отметок, которые делятся средней отметкой пополам.
2. Допустимое смещение отметок от номинала ±3
3. Риски и цифры гравируют. Ширина рисок – 0,2мм, глубина – 0,85мм. Шрифт надписей ПО-5 по ГОСТ 2930-62. Гравировку заливают эмалью.

Рис.5
Разметка на многооборотной шкале наносится с учётом проведённых расчётов. Шкала закрепляется на валу с помощью штифта. Шкалу и спиральную шкалу соединяем склеиванием.
7. Расчёт червячной передачи
Исходные данные:
Передаточное число червячной передачиЗаходность червяка Число зубьев на червяке Модуль зацепления |
U = 12Z1 = 4 Z2 = 48 M = 1 |
7.1 Расчёт параметров зацепления
7.1.1 Межосевое расстояние
aw = 0.5M(Z2 + q) = 0.5*1(48+20) = 34
где q – коэффициент диаметра червяка. Он выбирается из специального ряда. Примем = 20, т.к. необходимо повысить жёсткость червяка.
7.1.2 Принимаем h а * = 1 по ГОСТ 9036 – 73.
7.1.3 Передаточное число U = 12.
7.1.4 Модуль зацепления M = 1
7.2 Расчёт червяка
7.2.1 Длина нарезанной части червяка
b1 ³ (12.5+0.09*Z2 )*M
b1 ³ (12.5+0.09*48)*1 = 16.89; b1 = 17
На конце нарезной части выполняют фаски под углом 20о . Обеспечение жёсткости – основное условие, предъявляемое к конструкциям червяков. Поэтому расстояние между опорами вала – червяка принимают по возможности минимальным.
7.2.2 Находим делительный угол подъёма витка
tgg = Z1 /q
g = arctg Z1 /q = arctg 4/20 = 11.3°
7.2.3 Находим высоту витка
h = (2 hа * + cos20°)M = 2.25*1 = 2.25
7.2.4 Находим делительный диаметр червяка
d = q*M = 20*1 = 20
7.2.5 Определяем диаметр вершин витков
da 1 = d1 + 2M = 20 +2 =22
7.2.6 Находим диаметр впадин витков
df 1 = d1 - 2.5M = 20 –2.5 = 17.5
7.2.7 Находим шаг червяка
p = pM = 3.14
7.2.8 Ход витка рассчитываем по известному модулю зацепления
pz 1 = p* Z1 = 3.14*4 = 12.56
7.2.9 Выбираем архимедов червяк и правое направление линии витка
7.2.10 Определяем коэффициент смещения
x = aw /M – 0.5(Z2 +q) = 34 – 34 = 0
Отношение фактического передаточного от заданного составляет не более 4% . Червяк изготавливается из стали 45 в соответствии с ГОСТ 1050 – 74.Диаметр не нарезанной части червяка выбирают таким образом, чтобы обеспечивать выход инструмента по возможности свободным при обработке витков.
7.3 Расчёт червячного колеса
7.3.1 Определяем делительный диаметр колеса
d2 = Z2 *M = 48*1 = 48
7.3.2 Диаметр вершин зубьев определяем по формуле
da 2 = d2 + 2M = 50
7.3.3 Вычисляем диаметр впадин зубьев
df 2 = d2 - 2.5M = 45.5
7.3.4 Наибольший диаметр червячного колеса
dam2 £ da2 + 6M/Z1 + 2 = 50 + 6/4 + 2 = 53.5; dam2 = 52
7.3.5 Ширина венца зубчатого колеса
b2 £ 0.67da 1 = 14.74; b2 = 14
7.3.6 Угол обхвата червяка колесом выбираем в зависимости от назначения передачи
2d = 22 … 66°
В связи с большим диаметром отверстия в колесе полагаем.
7.3.7 Определяем радиус выемки поверхности вершин зубьев
R = 0.5q – M = 0.5*20 –1 = 9
Зубчатый венец изготавливается из бронзы и насаживается с натягом на стальное кольцо. Марка бронзы БРАК – 9 – 4Л по ГОСТ 1586 – 70. Кольцо насаживаем с натягом на поверхность волновода.
7.3.8 Определяем радиусы закруглений впадин и вершин зубьев
Pf 2 = 0.3M = 0.3; Pk 2 = 0.1M = 0.1
7.3.9
Допуски на размеры червяка и колеса назначены в соответствии с таблицей по ГОСТ 9368 – 60. Соединение в натяг можно получить непосредственно после изготовления колеса.
8. Выбор диаметра вала – червяка
Диаметр вала определяем из условия прочности на кручение, а изгиб учитывается путём снижения допустимых напряжений
d³ = 2
где Mk–крутящий момент, выбираемый из конструктивных соображений Mk = 20
[t] - допускаемое напряжение [t] = 20 мПа
В связи с тем, что вал изготавливают заодно с червяком принимаем d = 12мм. В процессе разработки конструкции вала размеры назначают исходя из конструктивных соображений. Номинальные диаметры всех посадочных мест согласуют со стандартным рядом номинальных размеров. Для повышения технологичности конструкции размеры галтелей и размеры фасок на одном валу принимают по возможности одинаковыми. Ширина канавок для выхода инструмента также будем принимать одинаковой. В местах изменения диаметра вала выполняем плавный переход-галтель постоянного радиуса. Для уменьшения концентрации напряжений разность между диаметрами ступеней вала должна быть минимальной, а радиус галтели максимальным. На чертеже также показаны предельные отклонения размеров, допуски форм и расположение поверхностей, параметры шероховатости, указания о материале, другие сведения, необходимые для изготовления детали. Требования к шероховатости сопрягаемых поверхностей устанавливают исходя из величины назначенного допуска. Максимально необходимую шероховатость поверхности детали можно определить по заданному допуску в справочнике.
9. Выбор типа подшипников для вала червяка
Принимаем предварительно подшипник шариковый радиально-упорный легкой серии 36100 с углом a=12°.
Fr 1 = Fr 2 = 10.517H; Fa = 40.17H
Частота вращения вала n = 300 об/мин. Требуемая долговечность подшипника L = 6300 час. Диаметр посадочной поверхности d = 10 мм.
Для этого подшипника на стр.201 в книге [3] по таблице находим:
С = 5030 – динамическая грузоподьемность
Со = 2180 – статическая грузоподьемность
Определяем отношение :
Fa /Co = 40.17/2180 = 0.02
X = 0.014; Y = 1.81; l = 0.3
Эти значения находим для заданного отношения по таблице в учебнике [2]. Находим отношение
Fa /VFr = 40.17/1 * 10.517 = 2.74
Окончательно принимаем
X = 0.014: Y = 1.81
Определяем эквивалентную динамическую нагрузку. Принимаем значения коэффициентов Kr = 1; Kб = 1.3 в соответствии с таблицей учебника [3].
Pf =(VXFr +YFr )*Kr *Kб =(1*0.014*10.517+1.81*40.17)*1*1.3 Kr =50.81H
Определяем требуемую грузоподьемность по формуле:
Cmp = Pf = 47.48H
Так как Cmp < C, то данный подшипник подходит. Характеристики подшипника:
d = 10мм; B = 8мм; r = 0.5мм; D = 26мм; a = 20°
Способ установки подшипников на валах показан на сборочном чертеже аттенюатора.
10. Выбор типа подшипника для подвижного волновода
 |
Выбираем предварительно шариковый радиальный подшипник особо легкой серии 107.
Для этих подшипников из таблицы в учебнике [2] находим, что
Co = 15900H - динамическая грузоподьемность.
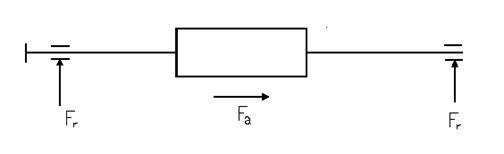
Так как подшипник радиальный, то осевая составляющая равна 0. Из условия равновесия находим
Fa = 40.17H; Fr = 17.1 H
Находим отношения по таблице в учебнике [3] находим, что
X = 0.56; Y = 2.3; l = 0.19
Находим отношение
Fa /VFr = 40.17/17.2 = 2.54,
что больше l = 0.19.
Окончательно принимаем X = 0.56; Y = 2.3.
Находим эквивалентную динамическую нагрузку
Pe = (Fr *XV + XFa )* Kб *Kr
Принимаем Kr = 1 (температура подшипника меньше 100°C;
Kб = 1, см. таблицу в учебнике 2 ).
Pe = (1*0.56*17.1 + 2.3*40.17) = 40.263H
Определяем требуемую динамическую грузоподьемность
Cmp = Pe = 49.574H
Так как Cmp < C, то предварительно выбранный подшипник подходит. Этот подшипник имеет следуюшие характеристики:
d = 31,5мм; B = 14мм; r = 1.5мм; D = 62мм;
C = 15900H; Co = 8500H.
Литература
1.Элементы приборных устройств (курсовое проектирование) в 2-х частях под ред. О.Ф. Тащенко. М. «Высшая школа» 1978.
2.Дунаев П.Ф. Конструирование узлов и деталей машин. – М.: «Высшая школа» 1978.
3.«Справочник конструктора точных приборов» под. Ред. Н.Я. Левина. М.: «Машиностроение» 1964.
4.Курсовое проектирование механизмов РЭС: Учебное пособие для вузов по спец. «Конструирование и технолог. радиоэлектр. средств»/ В.В. Джамай, И.П. Плево, Г.И. Рощин и др.; Под ред. Г.И. Рощина. – М.: «Высшая школа», 1991.