| Скачать .docx | Скачать .pdf |
Реферат: Изучение конструкций, кинематики и настройки сверлильных станков
ИЗУЧЕНИЕ КОНСТРУКЦИЙ, КИНЕМАТИКИ И НАСТРОЙКИ СВЕРЛИЛЬНЫХ СТАНКОВ
Методические указания к лабораторным занятиям по дисциплине "Металлорежущие станки"
СВЕРЛИЛЬНЫЕ СТАНКИ
Сверлильные станки предназначены для сверления сквозных и глухих отверстий в сплошном материале, рассверливания имеющихся отверстий на больший диаметр, зенкерования, цекования, зенкования, нарезания внутренней и наружной резьбы и др. Сверлильные станки бывают:
1) настольные, для обработки отверстий малого диаметра до -3, 6, 12 мм. Такие станки размещаются на столах, верстаках, они имеют высокие частоты вращения (до 16000 об/мин). Это станки модели 2Д103П, 2Г106П, 2Д112П, 2М112 и др.;
2) вертикально-сверлильные, одно- и многошпиндельные с постоянным расположением шпинделей (рядные) и с переставными шпинделями;
3) радиально-сверлильные;
4) горизонтально-сверлильные для сверления глубоких отверстий (глубина сверления 10…12 диаметров);
5) сверлильно-центровальные для получения центровых отверстий на заготовках.
Станки разновидностей 2 и 3 применяются для сверления отверстий диаметром до 18, 25, 35, 50 и 75 мм.
ВЕРТИКАЛЬНО-СВЕРЛИЛЬНЫЕ СТАНКИ
Наибольшее распространение они получили в промышленности. На рис. 1 показан внешний вид станка мод. 2Н135-1, который выпускается взамен станка мод. 2Н135 и отличается от него наличием "плавающего" поворотно-передвижного стола, позволяющего вести обработку нескольких отверстий без перезакрепления обрабатываемой детали.
Продольное перемещение стола и поперечное перемещение салазок происходят по направляющим качения. Зажим стола осуществляется посредством рукоятки. На продольном столе смонтирован поворотный стол. На станках, у которых нет "плавающего" стола для совмещения центров инструмента и обрабатываемого отверстия, перемещают заготовку вручную. После этого ее закрепляют. Для обработки следующих отверстий заготовку освобождают, снова совмещают центры, закрепляют и т.д.

Наличие на станке 2Н135-1 "плавающего" стола позволяет вести многокоординатную обработку деталей по кондуктору, по разметке или по предварительно настроенным кулачкам без ее перезакрепления. При обработке по кулачкам поиск координат обрабатываемых отверстий осуществляется по схеме расположения отверстий (по чертежу в масштабе 1:1) с помощью механизма поиска координат. Кулачки настраиваются по шаблону или по разметочной детали. На станке можно сверлить наибольший диаметр 35 мм, вылет шпинделя станка (расстояние от оси шпинделя до колонны) 300 мм, угол поворота стола 360°. Кинематическая схема станка приведена на рис. 2.
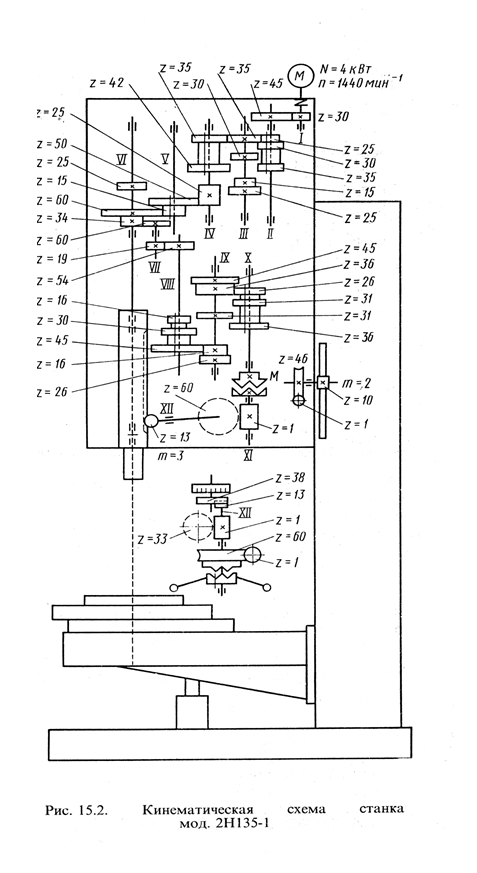
Главное движение
Шпиндель VIполучает вращение от электродвигателя N=4 кВт,
n=1440 1/мин. через постоянную зубчатую пару ![]() . С вала IIна вал IIIc помощью тройного 25-30-35 передаётся три варианта передаточных отношений. С вала III на вал IVcпомощью двойного блока 35-42. Между валами IVи Vпостоянная передача
. С вала IIна вал IIIc помощью тройного 25-30-35 передаётся три варианта передаточных отношений. С вала III на вал IVcпомощью двойного блока 35-42. Между валами IVи Vпостоянная передача ![]() . С вала Vна шпиндель VIсообщается два варианта передаточных отношений.
. С вала Vна шпиндель VIсообщается два варианта передаточных отношений.
Таким образом, коробка скоростей с помощью одного тройного и двух двойных подвижных блоков обеспечивает получение шпинделем 12 частот вращения в пределах 31,5…1400 мин -1.
Минимальную частоту щпиндель получает по следующей кинематической цепи:
![]()
При выполнении лабораторной работы необходимо написать уравнение кинематического баланса для цепи главного движения и рассчитать значения его 12-ти частот.
Движение подачи.
Осевое перемещение гильзе шпинделя сообщается от шпинделя VIчерез постоянные передачи 34-60 и 19-54 и трёхваловую коробку подач. Тройной блок на валу VIIIи тройной блок на валу Х обеспечивает получение девяти различных величин подач в пределах 0,1…1,6 мм/об. Минимальную подачу шпиндель получает по следующей кинематической цепи:
![]()
В лабораторной работе необходимо записать уравнение кинематического баланса для цепи подач и рассчитать значения 9-ти подач станка.
Механизм подачи обеспечивает ручное перемещение шпинделя, включение и выключение механической подачи. Нарезание резьбы осуществляется при ручной подаче шпинделя и реверсированием двигателя главного движения.
Вертикальное перемещение сверлильной головки (установочное перемещение) осуществляется вручную через червячную передачу
z=1-46. Требуемую глубину сверления устанавливают посредством кулачков на лимбе отсчета глубины сверления. Шпиндель имеет пружинный противовес.
Взамен станка мод. 2Н135 выпускаются модели: 2Н135Ц- с автоматическим циклом обработки; рядные со столом-плитой 2-, 3- и 4-шпиндельные.
|
РАДИАЛЬНО-СВЕРЛИЛЬНЫЕ СТАНКИ
Предназначены для выполнения тех же операций, что и вертикально-сверлильные станки, но для изготовления деталей больших размеров, как, например, корпусные детали.
На рис.3 приведен внешний вид радиально-сверлильного станка мод. 2554. На фундаментной плите 1 установлена неподвижная колонна 2, на которую надета поворотная гильза 4. Последняя после поворота зажимается гидрозажимом 3 на колонне 2. На гильзе 3 имеются вертикальные направляющие, по которым перемещается траверса (рукав) 5.
На траверсе смонтирована сверлильная головка 6, которая может перемещаться вдоль траверсы и поворачиваться вместе с ней и поворотной гильзой 3 на 360°. Обрабатываемая деталь устанавливается на подставке (столе) или непосредственно на фундаментной плите или на полу. Наибольший диаметр сверления 50 мм, вылет шпинделя 350…1600 мм, наибольшее вертикальное перемещение траверсы 1000 мм.

Сверлильная головка конструктивно выполнена, как и на вертикально-сверлильном станке, но имеет больше частот вращения и число подач, что позволяет применять наиболее рациональные режимы резания. Сосредоточение органов управления на сверлильной головке, наличие гидрозажима колонны, сблокированного с зажимом сверлильной головки, автоматизация зажима траверсы на колонне, наличие системы предохранительных устройств, исключающих поломку станка при перегрузке, позволяют максимально сократить вспомогательное время и обеспечить высокую производительность.
Совмещение центров инструмента и обрабатываемого отверстия осуществляется поворотом траверсы и продольным перемещением сверлильной головки вдоль траверсы. После установки требуемой координаты сверлильная головка и колонна с траверсой закрепляются.
Кинематическая схема станка мод. 2554 приведена на рис. 4.
|
||

Главное движение
Вращение шпинделю сообщается от электродвигателя М1 через постоянную зубчатую передачу 26-38. С первого вала коробки скоростей на второй вал передаются две прямые передачи при помощи двойного блока ![]() или
или ![]() (при верхнем включении фрикционной муфты М1
) или обратное вращение по цепи
(при верхнем включении фрикционной муфты М1
) или обратное вращение по цепи ![]() (при нижнем включении муфты М1
).
(при нижнем включении муфты М1
).
Со второго вала на третий движение сообщается посредством двойного блока ![]() или
или ![]() , а с третьего вала на четвёртый вращение передаётся посредством двойного блока
, а с третьего вала на четвёртый вращение передаётся посредством двойного блока ![]() или
или ![]() .
.
Пятому валу сообщается с четвёртого вала два варианта передаточных отношений посредством двойного блока ![]() или
или ![]() .
.
С пятого вала на шпиндель движение передаётся по двум вариантам: передача 50-28 и 13-65 (при включении шестерни 28 вниз в колесо с внутренним зацеплением 28, сцепляющего колесо 65 со
шпинделем.
Таким образом, коробка скоростей станка обеспечивает получение 32 передаточных отношений, но часть из них повторяется, поэтому реально используется 25 частот вращения, в пределах 18…2000 мин -1 .
Уравнение кинематической цепи главного движения (вращения шпинделя) для максимальной частоты вращения будет:
![]() мин -1
мин -1
При выполнении лабораторной работы необходимо написать уравнение кинематического баланса цепи главного движения и рассчитать значения всех 25-ти частот шпинделя.![]()
Реверсирование вращения шпинделя осуществляется переключением двухсторонней фрикционной муфты М 1 .
Движение подачи.
Осевое перемещение гильза шпинделя получает от шпинделя станка через зубчатые колёса 36-44, коробку подач и постоянные передачи.
На первом валу коробки подач расположен тройной скользящий блок, сообщающий второму валу три варианта передаточных отношений: ![]() или
или ![]() или
или ![]() .
.
Тройной блок, расположенный на третьем валу, получает со второго вала три варианта передаточных отношений: ![]() или
или ![]() или
или ![]() . Далее движение может передаваться по трем направлениям:
. Далее движение может передаваться по трем направлениям:
1) через перебор ![]() ;
;
2) смещением третьего блока вниз, когда шестерня 18 этого блока соединяется напрямую с колесом внутреннего зацепления 18, сблокированного с шестерней 49;
3) при среднем положении третьего блока через зацепление ![]()
и далее ![]() .
.
Затем движение через червячную пару ![]() и реечную шестерню 13 передаётся рейке гильзы шпинделя.
и реечную шестерню 13 передаётся рейке гильзы шпинделя.
Таким образом, коробка подач позволяет получить 27 передаточных отношений, но часть из них повторяется, поэтому реально используется 21 число подач в пределах 0,05…5 мм/об. Муфта М 2 является предохранительной, она срабатывает при перегрузке, а также отключается при достижении заданной глубины сверления.
Запишем уравнение кинематического баланса для минимальной подачи:
![]() мм/об
мм/об
При выполнении лабораторной работы необходимо написать уравнение кинематического баланса цепи подач и рассчитать значения всех подач.
Гильза со шпинделем уравновешивается спиральными пружинами, которые регулируются вручную рукояткой 1 через червячную передачу z=1-80. Быстрое перемещение невращающегося шпинделя можно осуществлять маховичком 2. Штурвал 3 служит для быстрого ручного перемещения или грубой подачи шпинделя, а также для включения и выключения механической подачи. Перемещение сверлильной головки вдоль траверсы может осуществляться вручнуюмаховичком 4 или от гидромотора 5.
Вертикальное перемещение траверсы осуществляется от электромотора М3. Муфта М6 предохранительная. Зажим сверлильной головки на траверсе и траверсы на гильзе осуществляется гидроцилиндрами через рычажные механизмы. Зажим гильзы на колонне осуществляется плунжером-рейкой и передачей винт-гайка (на схеме не показаны).
На базе станка мод. 2554 выпускаются модернизированные станки мод. 2А554Е- передвижные на салазках; мод. 2554Р- передвижные по рельсам; мод. 2А557, 2А557Е, 2А557Р- с увеличенным вылетом шпинделя до 3150 мм; мод. 2А554Ф1- с автоматическим циклом и цифровой индикацией шпинделя и др.
На базе станка мод. 2554 выпускается также координатно-сверлильный станок с ЧПУ мод. 2554Ф2.