| Скачать .docx |
Курсовая работа: Курсовая работа: Механические вибраторы строительных и дорожных машин
Федеральное агентство по образованию
Пермский государственный технический университет
Курсовая работа
Механические вибраторы строительных и дорожных машин
1 Задание на проектирование
Спроектировать виброблок с дискретно-регулируемой (от minдо max) возбуждающей (возмущающей) силой, имеющей следующие параметры:
1.1 Максимальная возбуждающая сила Pmax =4000 H =4 kH
1.2 Конструктивная схема виброблока № Г
1.3 Тип корпуса подшипника виброблока Ц
1.4 Форма дебалансного элемента № 6
1.5 Привод виброблока – асинхронный электродвигатель. Синхронная
частота вращения ротора электродвигателя 3000 об/мин
1.6 Частота вращения дебалансного вала виброблока n=2000об/мин
1.7 Глубина регулирования возмущающей силы виброблока Грег =80%
Грег
=![]() Pmin
=Pmax
(1-Грег
)=4(1-0.80)=0.8 kH
Pmin
=Pmax
(1-Грег
)=4(1-0.80)=0.8 kH
1.8 Время необходимое для изменения (регулирования)возмущающей силы виброблока не менее 5 минут
1.9 Дебалансный вал виброблока должен быть закрыт быстросъемным защитным кожухом
1.10 Опоры дебалансного вала расположить на общей соединительной пластине, предназначенной для крепления виброблока на объекте использования
2 Принципиальная схема и расчет элемента виброблока
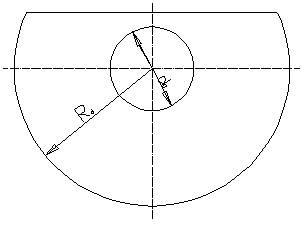
Форма дебалансного виброблока
Принципиальная схема элемента виброблока
2 Расчеты
2.1 Выбор материала деталей. Вал виброблока и дебалансный элемент выполняем из стали 45.
2.2 Определить размеры поперечного сечения вала виброблока
Fвал =πd2 /4=Рmax nE /[Tср ] – площадь сечения вала
nE
–суммарный коэффициент запаса прочности (nE![]() 2.5)
2.5)
[Tср ]–допускаемые напряжения при срезе [Tср ] <65МПа=650 ктс/см2
Fвал =4000·2.5/65·106 =0.0001538 м2 =1.538 см2
Диаметр расчетного сечения d=![]()
![]() = 1,4см = 14 мм
= 1,4см = 14 мм
2.3 Выбрать подшипники качения опор виброблока из расчета³3000часов непрерывной работы.
Ln -долговечность работы подшипника Ln =106 /60n(c/Rэ ) γ
n-число оборотов вала виброблока (n=2000об/мин)
Rэ - эквивалентная динамическая нагрузка на подшипник, которая в первом приближении Rэ =(1…1,5)Рmax =1.2·4000=4800 Н
γ-показатель степени (γ=3 для шариковых подшипников)
с- табличная грузоподъемность подшипника.
В результате подбора удовлетворяющим условию оказывается подшипник 1311, средняя серия:
| Шарики | nпред ,об/мин, при смазке |
Масса,кг типов |
d2 , наим. |
D2 , наиб. |
|||||||||
| dк | D | B | r | α0 | Dw | z | C | Co | плас-тичной | жид-кой | 1000 или 111000 | ||
| 55 | 120 | 29 | 3,0 | 9 | 15,08 | 15 | 40600 | 22900 | 4000 | 5000 | 1,58 | 64,4 | 111 |
2.4 Определить мощность приводного электрического двигателя
N= kн.п *fРmax πdк n/η , [Вт]
kн.п = (1÷1,5) – коэффициент неучтенных потерь, f = 0,01 – коэф. трения качения, dк –диаметр отверстия внутреннего кольца (d=0.055 м; η=0.94; π=3.14; Pmax =4000 H; n=2000об/мин=50об/с)
N=0.01*4000*3.14*0.055*50/0.94=294 Вт=0.294 кВт
Возьмем электродвигатель асинхронный трехфазной серии 4А с синхронной частотой вращения 3000 об/мин
4А63А2У N=0.37 кВт n=2770 об/мин
2.5 Спроектировать дебалансный элемент, имеющий, при данной форме и размерах, максимальную величину радиальной координаты центра масс. При проектировании считаем Rd
/d0![]() 3,
3,
где d0 - диаметр вала в месте установки дебаланса
d0 =65 мм Rd =75 мм
Координату центра масс определяем с помощью подвеса натуральной модели дебаланса на оси, не совпадающей с центром масс: Rц =12мм
2.6 Спроектируем опоры качения виброблока, состоящие из корпуса подшипника и уплотнительных устройств. Корпус подшипника цельный, имеет лапы для крепления.
Уплотнительные устройства - резиновые армированные манжеты ГОСТ 8752-85 (без пыльника).
dВ = dк + 5=60 мм
| диаметр вала, dВ мм | наружный диаметр, мм | ширина, В мм |
| 60 | 85 | 12 |
Смазку для подшипников возьмем солидол жировой (ГОСТ 1033- 79).
2.7 Составим расчетную схему.
Определим расстояние между опорами L![]() (20
(20![]() 30)
30)![]() .
.
L![]() (20
(20![]() 30)
30)![]() = (20
= (20![]() 30)
30)![]() =383,2 мм.
=383,2 мм.
Расстояние м/у опорами L=220мм.
Определить реакции опор :
![]() МВ
=0 : Р1
*l1
- RВ
*(l1
+l2
) + Р2
*(l1
+l2
+ l3
) =0
МВ
=0 : Р1
*l1
- RВ
*(l1
+l2
) + Р2
*(l1
+l2
+ l3
) =0
RВ = (Р2 *(l1 +l2 + l3 ) +Р1 *l1 )/ (l1 +l2 ) =(3,2*(l1 +l2 + l3 ) +Р1 *l1 )/ (l1 +l2 )=
=(3,2*0,3+0,8*)/0,22=4,76кН
![]() МА
=0: RА
*(l1
+l2
)- Р1
*l2
+ Р2
* l3
=0
МА
=0: RА
*(l1
+l2
)- Р1
*l2
+ Р2
* l3
=0
RА =( Р1 *l2 -Р2 * l3 )/ (l1 +l2 ) =(0.8*0.11-3.2*0.08)/0,22=-0,76 кН
Проверка: Рmax + RА +RB =0
-4000+4760-760=0
0=0 , то есть реакции определены верно.
Выполняем проверку долговечности подшипников Rэ =V*R*kб *kt
V=1- коэф. вращения, kб =(1÷1,2) – коэф. безопасности, kt – температурный коэф.
Rэ =1*4760*(1÷1,2)*1 ≈4800
Повторим расчет подшипников на долговечность:
Ln =106 /60·2000(40600/4800)3 =5042.8 часов
Подобранный подшипник подходит, так как полученная долговечность больше требуемой (![]() 3000 часов).
3000 часов).
2.8 Спроектируем фрагмент клиноременной передачи.
Подбираем ведомый шкив, зная диаметр ведущего шкива и число оборотов в минуту электродвигателя и виброблока, т.к. линейная скорость ремня приводного и ведущего шкива одинаковы, =>
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
;
![]() мм,
мм,
![]() мм, => диаметр ведомого шкива равен 140 мм.
мм, => диаметр ведомого шкива равен 140 мм.
2.9 Рассчитаем, подберем и установим крепежные болты (4шт.)
Рассчитаем наиболее нагруженный болт из условия, что нагрузка на него не будет превышать Pmax =4000 H
σ=P/F![]() [σ], где[σ]=160мПа
[σ], где[σ]=160мПа
F=4000/160·106 =25·10-6 м2 = 25 мм2
d=![]() =5,7 мм , тогда принимаем болты М10
=5,7 мм , тогда принимаем болты М10
2.10 Рассчитываем массу дебалансного элемента.
Pmax =mω2 R=> m= Pmax /ω2 R- масса дебаланса.
Угловая скорость вращения дебаланса
ω=πn/30=3.14·2000/30≤209,34 рад/мин
Rц - расстояние от оси вращения дебалансного вала до центра масс дебаланса (R=12мм).
![]() кг,
кг,![]() кг.
кг.
Площадь дебаланса F=117 см2 , плотность материала дебаланса ρ=7800кг/м3 . Зная площадь дебалансного элемента, его массу и плотность стали, определим толщину диска:
![]() ,
,
![]() ,
,
![]() ,
,![]() .
.
2.11 Составим график величины и направления возмущающей силы виброблока в зависимости от углового положения сменных дебалансных элементов.
| Q1 =Pmin | Q2 | Q3 | Q4 | Q5 = Pmax |
| 800 | 1600 | 2400 | 3200 | 4000 |
Q= F1
+F2
*cosα; ![]() , где F1
=F2
=2400 Н
, где F1
=F2
=2400 Н
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
3 Схемно–конструктивный анализ вибровозбудителей бегункового (поводкового) одночастотного и поличастотного вибратора
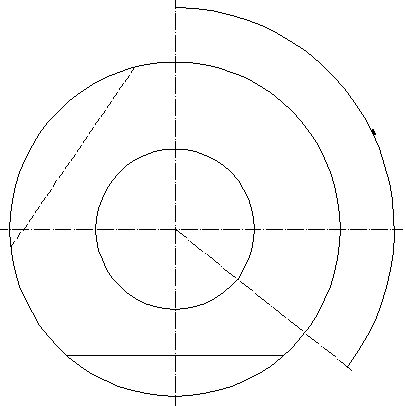
В дебалансных вибраторах центробежная сила дебалансов полностью передается на подшипники вала вибратора. С целью разгрузки подшипников предложена, конструкция бегункового вибратора (рис. 3). Здесь дебаланс 1, выполненный в виде цилиндрического ролика радиусом r, катится по внутренней поверхности беговой дорожки 2. Движение к ролику от водила 3 передается через специальный поводок 4. Центробежная сила P1 , возникающая при вращении водила, передается непосредственно на корпус виброэлемента. Подшипники ролика нагружены только тем усилием, которое необходимо для преодоления сопротивления перекатыванию его по беговой дорожке.
 |
В случае применения дебалансных роликов (рис. 3, б) возникают две центробежные силы различной частоты. Одна возбуждающая сила развивается вследствие вращения ц. т. ролика относительно оси О , а вторая - ввиду вращения ролика относительно своей оси О1 . Движение, ролика в этом случае можно представить состоящим из поступательного вместе с центром ролика и вращательного относительно этого центра.
При поступательном движении центробежная сила изменяется с частотой вращения водила w0 , (рис. 3, б). Ее амплитудное значение определяется из выражения
P1 =P1 ¢ +P1 ¢¢ =(M+m)Rw0 2
где P¢ 1 - составляющая центробежной силы от массы М, сосредоточенной в точке O1 , Н ; р¢¢ 1 - составляющая центробежной силы от массы m приложенной в ц.т. дебаланса (в точке А), Н; М - масса уравновешенной части ролика, кг; m масса дебаланса ролика, кг; R - радиус вращения центра ролика, м.
Вторая сила, изменяющаяся с частотой wр , возникает вследствие вращения неуравновешенного ролика вокруг своей оси:
P2 =m∙e∙wp 2
где е - эксцентриситет дебалансной части ролика, м; wр - угловая скорость вращения ролика, c-1 :
wр =R / r ∙w0
При установке нескольких дебалансных роликов различного диаметра результативная возмущающая сила равна геометрической сумме составляющих возмущающих сил. Большое значение при этом имеют начальные углы установки дебалансных роликов.
В существующих конструкциях поличастотных бегунковых (поводковых) вибраторов дебалансные ролики свободно перекатываются по беговой дорожке только за счет сил трения. Уменьшение сил трения при вибрации, чему способствует наличие масла в корпусе вибратора, силы инерции при пуске, а также противодействующий момент дебалансной части создают условия для проскальзывания ролика относительно беговой дорожки. Это вызывает уменьшение частоты вращения ролика и в некоторых случаях его остановку. Наличие скольжения изменяет характер результативной возмущающей силы, делает ее переменной и не позволяет иметь стабильный режим вибрации. Параметры бегунковых поличастотных вибраторов необходимо выбирать, с учетом отсутствия отрыва и скольжения ролика. При заданных параметрах необходимо создавать условия, при которых коэффициент трения ролика по беговой дорожке корпуса вибратора будет больше минимального.
Литература
1. Механические вибраторы строительных и дорожных машин.Под редакцией В.П. Шардина.
2. Курсовое проектирование деталей машин.Под редакцией А.Е. Шейнблита.