| Похожие рефераты | Скачать .docx |
Реферат: Основы проектирования и эксплуатации технологического оборудования транспортных предприятий
Министерство образования и науки Украины
Кременчугский университет экономики информационных
технологий и управления
Кафедра «Автомобили и автомобильное хозяйство»
Контрольная работа
По дисциплине
Основы проектирования и эксплуатации технологического оборудования транспортных предприятий
Кременчуг 2010г
Завдання
Гідравлічний розрахунок установок для миття автомобілів
Пояснити призначення всіх елементів пересувної платформи
Навести механічну характеристику асинхронного електричного двигуна трифазного струму
Пояснити принцип роботи стенда для випробувань коробок передач з електромагнітним навантажувачем
Будова пристроїв для перевірки інжекторів бензинових двигунів
Будова та принцип обладнання для визначення гальмівних якостей автомобілів
Будова знімачів для розбирання вузла з`єднань із гарантованим натягом
Навести методику аналізу оснащеності підприємства технологічним обладнанням
Гидравлический расчет установок для мойки автомобилей
Мойка автомобилей - механический, физико-химический и биологический метод удаления загрязнений путем приложения к ним сил воздействия, преобразование загрязнений за счет молекулярных превращений, растворения, создания эмульсий и других физико-химических процессов, разрушение загрязнений микроорганизмами.
Последовательность расчета моечной установки
1. Задавшись крупностью смываемых частиц (толщиной пограничного слоя) рассчитать давление воды в насадке.
2. Рассчитать силу гидродинамического давления струи и проверить выполнение условия удаления загрязнений.
3. Определить размер зоны действия касательных сил и число распылителей.
4. Рассчитать расход воды через установку. Если есть рамки предварительного смачивания и ополаскивания, рассчитывается дополнительных расход воды через эти рамки.
5. Выбрать гидравлическую схему установки и рассчитать потери напора.
6. Определить мощность электродвигателя привода насоса для подачи воды в установку.
7. При необходимости выполнить расчет привода щеток установки.
8. Произвести расчет основных параметров очистных сооружений.
Гидравлический расчет насосной установки
Основная расчетная схема изображена на рис.1.17.
Исходя из уравнения Бернулли, потери давления на преодоление гидравличе-
ских сопротивлений при наличии одного транзитного расхода

где ![]() - сумма коэффициентов местных сопротивлений по длине трубопровода на участке длиной l с диаметром трубы d ; λm - коэффициент потерь на трение.
- сумма коэффициентов местных сопротивлений по длине трубопровода на участке длиной l с диаметром трубы d ; λm - коэффициент потерь на трение.
С достаточной для практических расчетов точностью можно считать, что для сетки (см.рис.1.7) ξ = 9,7, для всасывающего клапана - 7,0, для задвижки - 5,5.
Коэффициент сопротивления отверстия и насадка
Для водопроводных стальных труб
![]()
При наличии путевого расхода (рис.1.18)

В соответствии с рис.1.17 участки I, II, III, IV - пропускают транзитный расход, а на участках V и VI имеется только путевой расход.
Суммарные потери давления получаются сложением потерь на отдельных участках, если они работают последовательно (рис.1.19,а).
Если участки работают параллельно (рис.1.19,б), то определяют расход в каждом из участков и на основании этого рассчитывают потери давления.

При параллельном соединении одинаковых трубопроводов

где Qi - расход через один из параллельных трубопроводов, м3/с; i – количество параллельных участков; Δ PΣ - суммарные потери давления в разветвленном трубопроводе, МПа; Δ Pi - потери давления в одном из параллельных трубопроводов, МПа.
Выбор насоса производится с учетом его совместной работы с трубопроводом.
Давление насоса проектируемой насосной установки
![]()
где ![]() - суммарные потери давления в трубопроводах установки, МПа;
- суммарные потери давления в трубопроводах установки, МПа;
![]() - геометрическое давление, МПа.
- геометрическое давление, МПа.
Здесь ![]() - геометрический напор, м.
- геометрический напор, м.
Далее, руководствуясь давлением Р и производительностью Q, по каталогу выбирают марку насоса.
Мощность на привод насоса

где ![]() - К.П.Д. насоса;
- К.П.Д. насоса; ![]() - К.П.Д. электродвигателя.
- К.П.Д. электродвигателя.
Насос, во избежание появления кавитации, лучше устанавливать как можно ниже по отношению к уровню воды в заборном колодце. Если высота насоса над уровнем воды более 3 м, необходимо производить дополнительный расчет на возможность кавитации.
Объяснить назначение всех элементов передвижной эстакады
Мобильная рампа (передвижная погрузочная эстакада) предназначена для погрузки - разгрузки вагонов, машин на тех складах, площадках где нет стационарных мест для погрузки-загрузки и работы производятся с "земли".
Позволяет позволяет проводить работу различной техникой - погрузчиками,мини-погрузчиками штабелерами, гидравлическими тележками и другой техники.
Конструктивные элементы
К числу основных конструктивных элементов передвижной мобильной рампы относятся:
· каркас из несущих балок, расположенных по бокам;
· въезд, изготовленный из стальных листов с «чечевичным» рифлением и оснащенный ребрами жесткости;
· аппарель – наклонная платформа, которая также производится с применением рифленого металлопроката (что обеспечивает оптимальное сцепление колес транспорта с поверхностью эстакады);
· телескопические опоры и шарнирное соединение с эстакадой позволяют настраивать необходимую высоту эстакады.
· Для удобства перемещения эстакада сделана на съемных шарнирах и оборудованы транспортировочными устройствами.
Погрузчик на жесткой сцепке транспортирует мобильную рампу к автомобилю. Оператор настраивает необходимую высоту устройства, чтобы наклонная поверхность образовывала мост между землей и кузовом грузовика.
Регулировка такой системы может производиться посредством электрогидравлического или ручного привода. После установки необходимой высоты автопогрузчик начинает работу, перемещаясь по поверхности мобильной эстакады в кузов автомобиля.

Механическая характеристика асинхронного электродвигателя трехфазного напряжения
Асинхронный двигатель - представляет собой машину переменного тока, состоящую из статора с тремя обмотками, магнитные поля которых сдвинуты в пространстве на 120° и при подаче трехфазного напряжения образуют вращающееся магнитное поле в магнитной цепи машины, и из ротора с короткозамкнутой обмоткой, чаще называемой «беличье колесо».
Механическая характеристика асинхронного двигателя - зависимость частоты вращения от вращающего момента. При расчетах под механической характеристикой понимается функция M(S), где
![]() -
-
скольжение ротора, а M-вращающий момент.
Формула Клосса
При аналитическом описании механической характеристики используется формула Клосса:
 (1)
(1)
Она учитывает, что

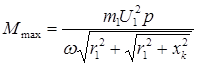
Сопротивление обмотки ротора современных АД, имеющие колбообразную форму или выполненные в виде двойной беличьей клетки имеют сопротивления (r2 ′и xк ), зависящие от скольжения. Если пренебречь r1 , малым по сравнению с xк , то можно записать:
 ,
,
где Mmax
-максимальный вращающий момент на всей механической характеристике (табличное значение), а ![]() и
и ![]() - некоторые функции скольжения, пропорциональные сопротивлениям ротора. Была поставлена задача определить форму
- некоторые функции скольжения, пропорциональные сопротивлениям ротора. Была поставлена задача определить форму ![]() и
и ![]() .
.
Аппроксимирующая функция
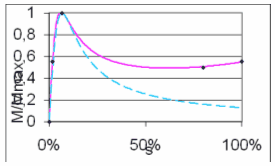
Достаточно точного математического описания зависимости сопротивлений ротора от скольжения на сегодняшний момент не существует. Поэтому вид ![]() и
и ![]() выбирался экспериментальным путем, а коэффициенты рассчитывались численно. Были выбраны следующие функции
выбирался экспериментальным путем, а коэффициенты рассчитывались численно. Были выбраны следующие функции
 (
при этом
(
при этом  ),
),
Согласно принципу обратимости электрических машин, асинхронный двигатель может работать как в двигательном, так и в генераторном режимах.
Трёхфазный двигатель — электродвигатель, который конструктивно предназначен для питания от трехфазной сети переменного тока.
Принцип работы трёхфазного двигателя был разработан Доливо-Добровольским.
В двигательном режиме при подключении двигателя к трехфазной сети переменного тока в обмотке статора образуется вращающееся магнитное поле, под действием которого в короткозамкнутой обмотке ротора наводятся токи, образующие электромагнитный момент вращения, стремящийся провернуть ротор вокруг его оси.
Ротор преодолевает момент нагрузки на валу и начинает вращаться, достигая подсинхронной скорости (она же и будет номинальной с учетом момента нагрузки на валу двигателя).
В генераторном режиме происходят обратные явления, приводной двигатель раскручивает ротор до подсинхронной скорости, при этом остаточное магнитное поле ротора, пронизывая обмотки статора, наводит в них ЭДС индукции, под действием которой на выводах обмотки появится напряжение.
Для смены направления вращения трехфазного асинхронного двигателя необходимо поменять местами две фазы из трех в месте подключения питания к двигателю.
Механическая характеристика асинхронного двигателя является "жёсткой", то есть при незначительном уменьшении оборотов крутящий момент двигателя возрастает очень сильно - "стремится поддерживать номинальные обороты". Это хорошее свойство для приводов, требующих поддержания заданной скорости независимо от нагрузки (транспортёры, погрузчики, подъёмники, вентиляторы).
Электроэнергия, подводимая к электродвигателю в двигательном режиме, потребляется (частью, обозначаемой "косинус фи") на совершение полезной работы и нагрев двигателя, остальная часть возвращается в сеть как индуктивная нагрузка. "Косинус фи" зависит от нагрузки на двигатель, на холостом ходу он близок к нулю. В характеристике двигателя указывается "косинус фи" для номинальной нагрузки.
Генераторный режим возникает при принудительном увеличении оборотов выше "идеального холостого хода". При этом магнитное поле ротора наводит ЭДС в обмотках статора и фазное напряжение на обмотках статора не падает, а увеличивается.
Принцип работы стенда для испытаний коробок передач с электромагнитной нагрузкой
Стенд для испытаний – необходим для приработки и испытания отремонтированного агрегата, подготовка его к восприятию эксплуатационных нагрузок, выявление дефектов, связанных с качеством ремонта деталей и сборки агрегатов, а также проверка соответствия характеристик агрегатов требованиям нормативно-технической документации.
Контрольные испытания проходят все отремонтированные коробки передач после приработки. В ходе контрольных испытаний (они, как правило, совмещены с приработкой) проверяется, нет ли резких стуков и шумов, выбрасывания или течи масла. Приемо-сдаточные испытания проходят все отремонтированные коробки передач после приработки. Целью приемо-сдаточных испытаний является оценка качества сборки. Если в процессе приработки и испытания обнаруживают неполадки, то двигатель отправляют на устранение дефектов, а затем повторно испытывают.
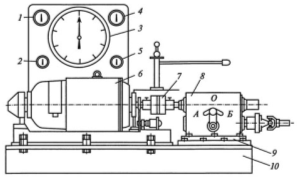
Электротормозной стенд: 1— указатель электротахометра; 2 — термометр для воды; 3 — циферблат весового механизма; 4 — манометр; 5 — термометр для масла; 6 — электрическая балансирная машина АКБ; 7 — муфта; 8 — редуктор; 9 — плита; 10 — рама.
Целью испытаний коробок передач является проверка качества восстановления отдельных деталей и в целом качества сборки. Испытания проводят как под нагрузкой, так и без нагрузки.
Сначала испытывают без нагрузки на всех передачах при частоте вращения первичного вала 900... 1000 мин-1, затем при 1400... 1500 мин-1. Продолжительность испытания определяется временем, необходимым для прослушивания работы коробки передач и выявления дефектов. При тех же частотах испытывают на каждой передаче по 2...3 мин и под нагрузкой 100... 150 Нм на первичном валу. В ходе испытаний проверяют, нет ли подтеканий масла, самопроизвольного выключения передач, повышенного шума, ударов, стуков. Для испытания коробок передач применяют стенды различной конструкции: электромагнитные, с асинхронным электродвигателем, с нагрузкой внутренними силами и с гидравлическим тормозом.
Устройство приспособлений для проверки инжекторов бензиновых двигателей
Инжекторная система подачи топлива — система подачи топлива, устанавливаемая на современных бензиновых двигателях. Эта система подачи топлива постепенно вытесняет карбюраторную систему подачи топлива. Двигатели, имеющие такую систему, называют инжекторными двигателями .
Устройство
В инжекторной системе впрыск топлива в воздушный поток осуществляется специальными форсунками — инжекторами. Инжекторные системы классифицируются следующим образом.
Положение и количество
· Моновпрыск или центральный впрыск — одна форсунка на все цилиндры, расположенная на месте карбюратора (во впускном коллекторе). В современных двигателях не встречается.
· Распределённый впрыск — каждый цилиндр обслуживается отдельной изолированной форсункой во впускном коллекторе. Различают несколько типов распределённого впрыска:
oОдновременный — все форсунки открываются одновременно.
oПопарно-параллельный — форсунки открываются парами, причём одна форсунка открывается непосредственно перед циклом впуска, а вторая перед тактом выпуска. В связи с тем, что за попадание топливо-воздушной смеси в цилиндры отвечают клапаны, это не оказывает сильного влияния. В современных моторах используется фазированный впрыск, попарно-параллельный используется только в момент запуска двигателя и в аварийном режиме при поломке Датчика Положения Распределительного Вала ДПРВ (Фазы).
oФазированный впрыск — каждая форсунка управляется отдельно, и открывается непосредственно перед тактом впуска.
oПрямой впрыск — форсунки расположены непосредственно возле цилиндров и впрыск топлива происходит непосредственно в него.
Метод управления
· Механический;
· Электронный — решение о времени и длительности открытия форсунок принимает микроконтроллер, основываясь на данных, поступающих от датчиков.
Пример работы
В контроллер (ВАЗ-2111) поступает следующая информация.
· о положении и частоте вращения коленчатого вала,
· о массовом расходе воздуха двигателем,
· о температуре охлаждающей жидкости,
· о положении дроссельной заслонки,
· о содержании кислорода в отработавших газах (в системе с обратной связью),
· о наличии детонации в двигателе,
· о напряжении в бортовой сети автомобиля,
· о скорости автомобиля,
· о положении распределительного вала (в системе с последовательным распределенным впрыском топлива),
· о запросе на включение кондиционера (если он установлен на автомобиле)
На основе полученной информации контроллер управляет следующими системами и приборами:
· топливоподачей (форсунками и электробензонасосом),
· системой зажигания,
· регулятором холостого хода,
· адсорбером системы улавливания паров бензина (если эта система есть на автомобиле),
· вентилятором системы охлаждения двигателя,
· муфтой компрессора кондиционера (если он есть на автомобиле),
· системой диагностики.
Изменение параметров электронного впрыска может происходить буквально «на лету», так как управление осуществляется программно, и может учитывать большое число программных функций и данных с датчиков. Также современные системы электронного впрыска способны адаптировать программу работы под конкретный экземпляр мотора, под стиль вождения и т. п.
Достоинства
Преимущества двухтактного инжекторного двигателя по сравнению с карбюраторным двухтактным двигателем:
· Уменьшение на 75% выбросов несгоревших углеводородов
· Уменьшение на 40% расхода топлива
· Лёгкий запуск
· Быстрый набор оборотов
· Более линейная характеристика крутящего момента
Одной из первых такие разработки внедрила в свои моторы корпорация OMC в 1997 году, выпустив двигатель, построенный с использованием технологии FICHT. В этой технологии ключевым фактором было использование специальных инжекторов, которые позволяли впрыскивать топливо непосредственно в камеру сгорания. Это революционное решение наряду с использованием современного бортового компьютера позволило точно дозировать топливо в тот момент, когда поршень при обратном движении перекроет все окна. В полость коленвала распыляется чистое масло, которое не смывается топливом – теперь его там нет! Топливо не смывает масло, что позволяет уменьшить его расход. Благодаря этому решению разработчики получили двухтактный двигатель с его совершенной динамикой разгона, великолепной кривой мощности и малым весом, но при этом имеющий уровни выброса и экономичности, как у карбюраторного четырёхтактного двигателя.
Инжекторная система позволяет улучшить эксплуатационные и мощностные показатели двигателя (такие как динамика разгона, расход топлива, экологические характеристики и т. д.). Основным преимуществом по сравнению с карбюраторной системой является самонастройка по датчику кислорода. Это позволяет длительное время соблюдать высокие экологические стандарты без ручных регулировок. Недостатки
Основные недостатки инжекторных двигателей по сравнению с карбюраторными:
· Высокая стоимость ремонта,
· Высокая стоимость узлов,
· Неремонтопригодность элементов,
· Высокие требования к качеству топлива,
· Необходимость в специализированном оборудовании для диагностики, обслуживания и ремонта.
Оборудованиедлядиагностикииремонта:инжектора,форсунок,топливнойсистемы
Основными признаками загрязнения топливной системы являются:
· Затрудненный запуск двигателя;
· Неустойчивая работа двигателя на холостом ходу и переходных режимах;
· Провалы при резком нажатии на педаль газа;
· Ухудшение динамики разгона двигателя и потеря мощности;
· Увеличение расхода топлива;
· Повышение токсичности отработавших газов;
· Появление детонации при разгоне вследствие обеднения смеси и повышения температуры в камере сгорания;
· Пропуски воспламенения;
· Хлопки в выпускной системе;
· Быстрый выход из строя кислородного датчика (лямбда-зонда) и каталитического нейтрализатора.
Загрязнение форсунок становится особенно заметным с наступлением холодов, когда испаряемость топлива ухудшается: появляются проблемы с пуском холодного двигателя.
На сегодняшний день существует два способа очистки топливной системы:
· чистка форсунок ультразвуком с их демонтажем;
· химическая очистка топливной системы без демонтажа форсунок.
Возникает вопрос – какому способу промывки инжектора автомобиля отдать предпочтение?
Сразу необходимо пояснить: эти два способа ни в коей мере не исключают друг друга. Каждый из способов несет свою функциональную исключительность, а вместе они являются комплексным обслуживанием автомобильной топливной системы. Промывка автомобильных форсунок в ультразвуковой установке предназначена для удаления тяжелых коксовых отложений с наружной стороны распылителя. Образование плотных отложений препятствует формированию правильного факела распыла, тем самым нарушая качество и количество подачи топлива в камеру сгорания. Сам процесс загрязнения форсунки необратим, поскольку причина кроется непосредственно в самом топливе, имеющем в своем составе большое количество присадок, выполняющих различные функциональные нагрузки. И в данное время не существует никакой другой технологи для восстановления исходных параметров форсунки, кроме как демонтаж ее с двигателя автомобиля и очистка в ультразвуковой ванне.
Отдельным пунктом в списке автосервисного оборудования для СТО стоит отметить оборудование для промывки, ремонта и очистки форсунок. Рабочим элементом современных систем впрыска топлива являются форсунки. При работе двигателя на топливе даже хорошего качества система впрыска (в том числе и форсунки) постепенно загрязняется, использование некачественного бензина ускоряет процесс засорения инжекторов.
У засоренной форсунки уменьшается производительность, изменяются направление и форма факела распыла, возможно даже полное прекращение топливоподачи, появляются проблемы с пуском непрогретого двигателя, провалы в его работе и т. д. Чистка любых форсунок ультразвуком позволяет удалить загрязнения из этих важнейших деталей системы впрыска топлива на специальных стендах.
Оборудование диагностики форсунок от Фарлам включает в себя стенды проверки форсунок серии Плазма 600 и Плазма Эконом.
Сначала проводится диагностика форсунок в тестовом блоке и затем чистка демонтированного инжектора в ультразвуковой ванне. Стенд для форсунок позволяет определить изменение электрических и механических параметров, на основании чего принимается решение о целесообразности чистки и последующего использования или замены форсунки.
Эффективная ультразвуковая промывка форсунок полностью восстанавливает первоначальную производительность и качество распыления топлива, стабилизирует работу двигателя.
Проверка форсунок: на производительность, герметичность, форму факела и качество распыла каждой форсунки до и после промывки форсунок
Для тестирования форсунок в тестовом блоке установки используется специальная жидкость Экотест. В ультразвуковой ванне в процессе промывки форсунок используется жидкость Экосоник ADS. Все виды работ по очистке, диагностике форсунок и промывке инжектора без демонтажа, можно осуществить на стенде проверки форсунок ПЛАЗМА.
На них проводится диагностика и ремонт форсунок непосредственного впрыска (GDI, FSI, NEODI, DISI, D4 и др.), (форсунок высокооборотистых мотоциклетных двигателей) помимо обычных форсунок (BOSCH, SIEMENS, NIPON DENSO, WEBER, DELPHI и др.). Для этого в электронную схему приборов были внесены изменения, позволяющие корректно управлять частотой открытия форсунок высокого давления.
Устройство и принцип работы оборудования для определения тормозных качеств автомобилей
Стенди визначення гальмівних якостей автомобілів
Всі стенди технічного діагностування гальм автомобілів підрозділяють на дві великі групи. Перша група таких стендів використовує сили зчеплення колеса з опорною поверхнею. У даних стендах реалізований гальмовий момент обмежений силою зчеплення колеса з опорною поверхнею стенда, тому в більшості з них неможливо реалізувати повний гальмовий момент автомобіля. Друга група стендів, що працюють без використання сил зчеплення колеса з опорною поверхнею, конструктивно відрізняється тим, що гальмовий момент передається безпосередньо через колесо або через маточину.
При діагностуванні автомобілів застосовуються стенди, що працюють з використанням сил зчеплення колеса з опорною поверхнею. У цих стендах реалізований гальмовий момент обмежений силою зчеплення колеса з опорною поверхнею стенда, тому в більшості з них неможливо реалізувати повний гальмовий момент автомобіля.
По конструкції опорних пристроїв стенди підрозділяються на:
площадкові, роликові й стрічкові (перша група); з вивішуванням осей коліс і без вивішування осей коліс (друга група).
В умовах автотранспортних підприємств і станцій технічного обслуговування технічний стан гальм перевіряють на барабанних стендах. Стендові випробування мають ряд переваг у порівнянні з дорожніми: завдяки застосуванню стаціонарних вимірювальних 307 приладів підвищується точність результатів випробувань; можлива роздільна перевірка кожного гальмового механізму; випробування безпечні на будь-якій швидкості; стандартні умови випробувань забезпечують повторюваність результатів і порівнянність даних, отриманих у різний час; малі витрати праці й засобів сприяють швидкій окупності стенда.
Гальмові системи на роликових стендах перевіряють силовим або інерційним методом. У першому випадку привод стенда обертає колеса й ролики з невеликою швидкістю (2 … 6 км/год). Оператор натискає на гальмову педаль, контролюючи зусилля натискання за допомогою спеціального приладу – педометра. Гальмові механізми створюють гальмові моменти, привод стенда переборює їх. У привод убудовані вимірювальна система, прилади показують значення моменту або гальмової сили на кожному колесі. На інерційних стендах колеса й барабани розганяють за допомогою привода або двигуна автомобіля до високої швидкості (30 … 160 км/год), після чого провадять гальмування. Привод відключається, гальмові механізми поглинають кінетичну енергію обертових коліс і барабанів, а вимірювальні системи реєструють параметри процесу гальмування.
У силових платформних стендах колеса автомобіля нерухливі, тому при натисканні на гальмову педаль змінюється лише зусилля зсуву (зриву) заблокованих коліс із місця, тобто сила тертя між гальмовими накладками й барабаном (диском). Існують стенди з одною загальною площадкою під всі колеса й із площадками під кожне колесо автомобіля.
Силові платформні стенди мають цілий ряд істотних недоліків, що виключають їхнє широке застосування. Наприклад, при випробуванні не враховуються вплив швидкості руху на коефіцієнт тертя ковзання й динамічних впливів у гальмовій системі. Результати вимірів багато в чому залежать від положення коліс на площадці стенда, від стану опорної поверхні й протекторів коліс. Виміряється лише зусилля зриву з місця загальмованих коліс.
Платформні інерційні стенди, що мають рухомі (одну загальну на кожну сторону або під кожне колесо) площадки, у порівнянні із силовими платформними стендами більш досконалі, тому що більш повно враховують динаміку дії гальмових сил у реальних умовах. Однак ці стенди мають ряд істотних недоліків: потреба в території для розгону автомобіля, зниження рівня безпеки робіт при 308 діагностуванні, не достатні точність і вірогідність діагностичної інформації.
Інерційні навантажувальні стрічкові стенди відтворюють дорожні умови взаємодії шини з опорними поверхнями.
Однак вони мають значні габарити й не забезпечують достатню стійкість автомобіля при діагностуванні, а такі конструктивні недоліки, як проковзування стрічки й більші механічні втрати в парах терть.
Найбільш достовірним є інерційний метод діагностування на роликових інерційних стендах. На них вимірюють гальмовий шлях по кожному окремому колесу, час спрацьовування гальмового привода й уповільнення (максимальне й по кожному колесу окремо), але через складність, високу вартість й більш низьку технологічність в експлуатації ці стенди застосовують украй обмежено.
Для діагностування гальм у стиснутих умовах, а також з метою локалізації несправностей і поглибленого діагностування найбільш ефективні переносні СТДГ. Суть методу роботи цих пристроїв полягає в тому, що колесо автомобіля примусово розкручують, і коли швидкість обертання досягає заданого значення, спрацьовує пристрій натискання на гальмову педаль, відбувається гальмування колеса, у процесі якого реєструється час спрацьовування гальмового привода, час наростання уповільнення у заданому інтервалі частот обертання колеса й гальмовий шлях при сталому значенні гальмової сили.
У зв'язку з малою інерційною масою вивішених коліс процесс гальмування істотно відрізняється від реального. Приведення результатів діагностування гальм до реальних умов здійснюють через перевідні коефіцієнти для гальмового шляху й уповільнення.
На СТО найбільш поширені силові роликові стенди, усе більше застосування дістають інерційні роликові стенди, перспективними є переносні прилади, у тому числі засновані на принципі виміру діагностичних параметрів на вивішеному колесі, що загальмовується.
Устройство съемников для разборки соединений с гарантированным натягом
Гарантированный натяг определяется как положительная разность между наименьшим средним диаметром вала шпильки и наибольшим средним диаметром отверстия
Для разборки соединений с гарантированным натягом следует применять съемники и прессы, а не выколотки и молотки. Прессы и механизированные съемники обеспечивают повышение производительности в 3...5 раз по сравнению с ручными. Различают универсальные и специальные съемники. Среди механизированных приводов наибольшее распространение получили гидравлический и пневматический. Наиболее производительными являются многопостовые гидравлические установки со сменными захватами и съемниками. Универсальный съемник может быть использован для снятия деталей различных диаметров путем регулировки тяг. Для удаления подшипников качения из гнезд применяют цанговый съемник гнезд применяют цанговый съемник.


Методика анализа оснащенности предприятия технологическим оборудованием
Задача Зд - 1.7
Гидравлический расчет автомобильных моечных установок и определение их продуктивности
Мойка предназначена для тщательного удаления загрязнений с наружных частей шасси и кузова автомобиля.
Для заданного автомобиля:
1) выбрать тип моечной установки;
2) выбрать прототип освоенных современных моечных установок;
3) изобразить конструктивную схему моечной установки;
4) изобразить схему системы оборотного водообеспечения моечной установки в автотранспортном предприятии;
5) рассчитать основные параметры моечной установки.
Автомобиль, для которого необходимо разработать моечную установку
ГАЗ-3307.
1. Выбирается струйно-щеточная установка для мойки автомобилей. Установка для мойки легковых а/м (моноволокно, 4 щетки, автомат) М130 - обмыв передних, боковых, задних плоскостей автомобилей, крыши. Давление воды в моющих рамках – 1,6 мПа, в рамках смачивания, ополаскивания и в консолях для подвода жидкости к щеткам – 0,1мПа. Угол между струей и омываемой поверхностью 900. Все насадки распылителей конической формы диаметром 0,004м. Наибольший диаметр трубопроводов 0,12м, наименьший – 0,06м.
1.1 Из табл. 1.1 для насадков конической формы коэффициент расхода μ=0,94, а коэффициент скорости φ=0,963.
1.2 По формуле (1.5) начальная скорость потока на выходе из насадков моющих рамок
![]() =
= ![]()
![]() ,
,
а на выходе из насадков рамок смачивания и ополаскивания
![]() .
.
1.3 В соответствии с рис. 1.14 среднее расстояние от насадков до омываемой поверхности
![]()
1.4 Площадь сечения струи в момент ее соприкосновения с омываемой поверхностью (1.9)
![]()
1.5 Площадь отверстия насадка (1.9)
![]()
1.6 Коэффициент аэрации струи
![]()
1.7 Средняя плотность жидкости на расстоянии X от насадка (1.8)
![]()
1.8 Гидродинамическое давление (1.3)
![]()
1.9 Максимальная сила сцепления между частицами загрязнений (1.2) со средним диаметром D = 50 · 10-6 м.
![]()
1.10 Условие удаления загрязнений (1.1)
![]()
В данном случае это условие не выполняется, так как по расчетам:
![]() a
a ![]()
При заданных условиях задачи для удаления загрязнений можно предусмотреть следующие мероприятия:
1. Уменьшить расстояние X от насадков до омываемой поверхности с тем, чтобы увеличить плотность аэрированной жидкости а, следовательно, и гидродинамическое давление;
2. Увеличить средний диаметр частиц загрязнений, допустим, до ![]() , ухудшив тем самым в допустимых пределах качество мойки;
, ухудшив тем самым в допустимых пределах качество мойки;
3. Уменьшить поверхностное натяжение моющей жидкости за счет ее подогрева и применения моющих средств.
В рассмотренном примере используем мероприятия 1 и 2,приняв![]() а
а ![]() Тогда, после повторных вычислений по п.п. 2.1.3 – 2.1.9
Тогда, после повторных вычислений по п.п. 2.1.3 – 2.1.9
![]() а
а ![]() т.е. условие
т.е. условие ![]() выполняется.
выполняется.
1.11 Толщина пограничного слоя (1.10) (рис.1.16)

1.12 Размер зоны действия касательных сил (1.11) (рис.1)

1.13 Диаметр моющей зоны (рис.1).
![]() где
где ![]()
![]()
Так как перекрытие площадей соседних зон должно быть в пределах (0,25 – 0,30)![]() , окончательно
, окончательно
![]()
1.14 Схема моющего узла установки составляется в соответствии с условием задачи (рис. 2).
Автомобиль моется струями сверху и снизу. Следовательно, длина ![]() каждой моющей рамки равна ширине автомобиля:
каждой моющей рамки равна ширине автомобиля:
Высота консолей ![]() для подачи воды к ротационным щеткам равна высоте автомобиля:
для подачи воды к ротационным щеткам равна высоте автомобиля:![]() .
.
Рамки смачивания и ополаскивания состоит из двух симметричных половин. Периметр смачиваемой поверхности ![]() равен периметру поперечного сечения автомобиля.
равен периметру поперечного сечения автомобиля.
![]()
1.15 Число распылителей в моющей рамке
![]() - округляем 6 шт.
- округляем 6 шт.
1.16 Число распылителей в консолях
![]() - округляем 7 шт.
- округляем 7 шт.
1.17 Число распылителей в каждой рамке смачивания (ополаскивания)
![]()
1.18 Расход воды через моющую рамку (1.6)
![]()
1.19 Расход воды через консоль
![]()
1.20 Расход воды через рамки смачивания (ополаскивания)
![]()
1.21 Общий расход воды
![]()
1.22 Гидравлическая схема установки выбирается студентом самостоятельно. Для упрощения расчетов желательно, чтобы моющий узел был гидравлически симметричен. Пример гидравлической схемы показан на рис. 3.
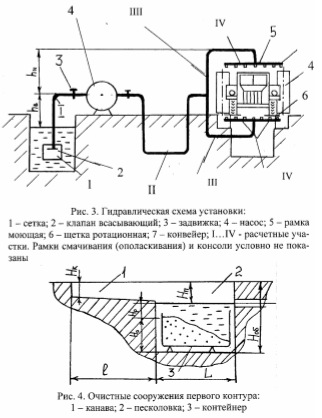
В схеме принято:
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Здесь ![]() – диаметр трубопровода на
– диаметр трубопровода на ![]() -м участке;
-м участке; ![]() - длина трубопровода на
- длина трубопровода на ![]() -м участке.
-м участке.
1.23 Потери давления на преодоление гидравлических сопротивлений (1.14) на участке ![]()
![]() , имеющем местные сопротивления в виде сетки
, имеющем местные сопротивления в виде сетки ![]() ; всасывающего клапана
; всасывающего клапана ![]() ; задвижки
; задвижки ![]() ; одного колена
; одного колена ![]()
![]()
1.24. Потери давления на участке ![]()
![]() , имеющем местные сопротивления в виде задвижки и четырех колен
, имеющем местные сопротивления в виде задвижки и четырех колен
![]()
1.25 На участке ![]()
![]() поток раздваивается. Поэтому расход воды через каждую ветвь моющего узла
поток раздваивается. Поэтому расход воды через каждую ветвь моющего узла
![]()
1.26 Потери давления в каждой ветви, имеющей по три колена
![]()
1.27 В конце участка ![]()
![]() часть воды уходит через ответвления на другие рамки. Поэтому расход через каждую моющую рамку, как уже было рассчитано в п. 1.1.18 составляет
часть воды уходит через ответвления на другие рамки. Поэтому расход через каждую моющую рамку, как уже было рассчитано в п. 1.1.18 составляет ![]() . В рамке поток раздваивается. Расход через половину рамки
. В рамке поток раздваивается. Расход через половину рамки
![]()
Этот расход путевой (рис. 1.18), причем в каждой половине рамки вода истекает через ![]() распылителя. Коэффициент сопротивления насадка с коническим распылителем (1.14)
распылителя. Коэффициент сопротивления насадка с коническим распылителем (1.14)
![]()
Местное сопротивление представлено одним коленом, имеющим ![]() . С учетом изложенного, потери давления на участке
. С учетом изложенного, потери давления на участке ![]()
![]() (1.16)
(1.16)
![]()
Такими потерями можно пренебречь, как и потерями в рамках смачивания (ополаскивания) и щеточных консолях.
1.28 Общие потери напора равны сумме потерь на отдельных участках
![]()
1.29 Преодолеваемое насосом установки геометрическое давление
![]()
1.30 Давление насоса проектируемой установки (1.18)
![]()
1.31 Мощность на привод насоса (1.19)
![]()
1.32. Для расчета привода щеток примем радиус вращающейся щетки ![]() ; высоту щетки
; высоту щетки ![]() частота вращения щеток
частота вращения щеток ![]() 1/мин; угол деформации (рис. 1.20)
1/мин; угол деформации (рис. 1.20) ![]() .
.
Линейная скорость на поверхности щеток (1.21)
![]()
1.33 Площадь сегмента деформируемой части щетки (1.24)
![]()
1.34 Масса нитей, подверженных деформации (1.23)
![]()
1.35 Центробежная сила (1.22)
![]()
1.36 Мощность на привод одной щетки (1.20)
![]()
1.37 Общая мощность привода щеток (1.25)
![]()
1.38 Скорость конвейера моечной установки (1.26)
![]()
1.39 Время мойки одного автомобиля (1.27)
![]()
1.40 Средний расход воды на мойку одного автомобиля
![]() .
.
1.41 Число автомобилей, проходящих через мойку в течение часa
![]()
где ![]() – коэффициент неравномерности поступления автомобилей.
– коэффициент неравномерности поступления автомобилей.
1.42 Часовой расход воды
![]()
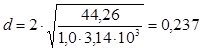
1.43 При расчете очистных сооружений первого контура (рис.4) сначала определяется площадь сечения потока воды через песколовку (1.28)
![]()
1.44 Расчетная глубина проточного слоя песколовки
![]()
где ![]() – принимаемая ширина песколовки.
– принимаемая ширина песколовки.
1.45 Длина песколовки (1.29)
![]()
1.46 Глубина от пола до уровня воды в песколовке (1.31)
![]()
где ![]() – глубина канавы на посту мойки;
– глубина канавы на посту мойки; ![]() - длина канавы.
- длина канавы.
1.47 Общая глубина песколовки (1.30)
![]()
1.48 Объем приемного резервуара (1.32)
![]()
1.49 Площадь водного зеркала гидроциклонов (1.33)
![]()

1.50 При диаметре одного гидроциклона ![]() площадь водного зеркала одного гидроциклона (1.34)
площадь водного зеркала одного гидроциклона (1.34)
![]()
1.51 Количество гидроциклонов (1.35)
![]()
Округленно NГ = 6 шт.
1.52 Требуемая площадь фильтров (1.36)
![]()
1.53 Объем резервуара очищенной воды
![]()
1.54 Объем камеры бензомаслоуловителя
![]()
1.55 Объем бака для сбора нефтепродуктов в сточных водах: 900мг/л. – после мойки грузовых автомобилей; 850мг/л. – после мойки автобусов; 75мг/л. – после мойки легковых автомобилей.
В данном случае
![]()
где ![]() – содержание нефтепродуктов определяется исходя из их содержания в сточных водах;
– содержание нефтепродуктов определяется исходя из их содержания в сточных водах; ![]() – количество рабочих смен в сутках;
– количество рабочих смен в сутках; ![]() – продолжительность рабочей смены;
– продолжительность рабочей смены; ![]() – плотность нефтепродуктов.
– плотность нефтепродуктов.
Задача 2
Вибір і розрахунок підйомно-транспортного обладнання поста ремонту автомобілів
Підйомно-транспортне обладнання використовуються при технічному обслуговуванні та ремонті автомобілів і забезпечує зручний доступ до агрегатів а також їх транспортування на пости ремонту.
Вихідні данні для задачі 2 студент обирає згідно варіанту з табл. 2
Таблиця 2
Завдання до розрахункової задачі 2
| Номер варіанта | Зд-2.4 |
| Автомобіль, який піднімає підйомник | ПАЗ-3205 |
| Висота підйому, м | 1,75 |
| Час підйому, с | 60 |
2.1 Призначення гідравлічного підйомника
Гідравлічні підйомники належать до розряду підйомно-оглядового обладнання. Вони використовуються при технічному обслуговуванні та ремонті автомобілів і забезпечують зручний доступ до їх агрегатів та вузлів.
2.2 Будова та робота гідравлічного підйомника
Будова гідравлічного підйомника пояснюються схемою, зображеною на рис.1. Робоча рідина (масло) з баку 3 подається насосом 4, через триходовий кран 5 до підплунжерного простору. Внаслідок цього плунжер переміщується до гори та підіймає автомобіль , що встановлюється на рамі 2. Тиск, який створюється насосом, контролюється манометром 6. Якщо він перевищує нормативний, ТО спрацьовує перепускний клапан 7, через який надмір масла повертається до баку. Така ситуація виникає при максимальному підйомі плунжера або при перевантажені підйомника. При підйомі триходовий кран встановлюється в положення 1; при опусканні – в положення 2. Опускання автомобіля відбувається під дією його ваги, але воно не здійснюється доти, поки не відкрити зворотний клапан 8. Цей самий клапан регулює швидкість опускання автомобіля. Якщо підйомник має декілька плунжерів (стояків), ТО його конструкція доповнюється механізмом, що забезпечує їх синхронне переміщення. Для забезпечення безпеки в піднятому стані підйомник має відкритий жорсткий стояк, що звичайно кріпиться до його рами.
Далі буде розглянуто методику розрахунку окремих елементів гідравлічного підйомника, яка може також використовуватися при розрахунку гідравлічних виконавчих елементів різноманітного обладнання, що використовується при обслуговуванні і ремонті автомобілів.
Перш ніж почати розрахунок гідравлічного підйомника, потрібно вибрати деякі вихідні його параметри.
2.3 Маса вантажу, що піднімає підйомник
Звичайно маса вантажу Ма визначається масою автомобіля, що обслуговується на цьому підйомнику. Наприклад, вважатимемо, що на підйомнику обслуговується автомобіль КамАЗ-5320, маса якого у спорядженому стані становить 7080 кг. Одночасно визначаємо, що на передню вісь автомобіля припадає 3320 кг, а на задні осі 3760 кг.
2.4 Кількість стояків підйомника
Залежно від кількості стояків m при незмінній вантажопідйомності зміняються розміри плунжера, а головне, стійкість автомобіля на підйомнику. Якщо автомобіль має невелику масу (близько 2 т) на розміри, ТО може використовуватися підйомник з одним стояком. Для нашого прикладу доцільно число стояків взяти 2.
2.5 Тиск робочої рідини, що діє на плунжер підйомника
Із зростанням тиску Р масла, що діє на плунжер, при незмінній вантажопідйомності можна зменшувати його розміри. З іншого боку, зростання тиску потребує більш досконалих матеріалів, а також підвищує вимоги до конструкції та якості виготовлення з’єднань. Звичайно в підйомниках такого типу використовується тиск близько 1,0 МПа.
2.6 Висота підйому плунжера
Висота підйому плунжера h визначається зручністю доступу до агрегатів та вузлів автомобіля під час його обслуговування та ремонту.
Для сучасних підйомників ця висота становить 1,7…1,8 м.
2.7 Час підйому автомобіля на максимальну висоту
Чим менший час підйому, тим вища продуктивність праці, але одночасно збільшується потрібна потужність приводного двигуна. Час підйому автомобіля на максимальну висоту для підйомників становить 30…120 с. Для нашого прикладу беремо підйому 60 с.
2.8 Коефіцієнт запасу вантажопідйомності
Необхідність прийняття деякого запасу на вантажопідйомність підйомника зумовлена тим, що можливе збільшення маси моделі автомобіля, який обслуговується, заводом-виготовлювачем, а також внаслідок установлення на нього додаткового обладнання. Крім того, перехід підприємства на обслуговування більш потужних автомобілів. Коефіцієнт запасу вантажопідйомності КЗ беруть 1,1…1,3; для нашого прикладу – 1,2.
2.9 Номінальна вантажопідйомність одного стояка підйомника
Згідно з прийнятим рішенням в прикладі, що розглядається, підйомник має два стояки. Навантаження від ваги автомобіля, яке припадає на один стояк, розподіляється близько від того, як розподіляється вага автомобіля по його осях. У автомобіля КамАЗ-5320 більша частина маси припадає на задні осі і становить 3760 кг. Доцільно конструкцію і розміри обох стояків приймати однаковими, що значно здешевить підйомник. Вантажопідйомність одного стояка в цьому випадку буде визначатися масою автомобіля, що припадає на задні осі. Розрахункова формула вантажопідйомності одного стояка має такий вигляд, кН:
![]()
![]()
![]() (1)
(1)
де К3
– коефіцієнт запасу вантажопідйомності; ![]() - маса автомобіля, що припадає на задні осі, кг; g – прискорення вільного падіння, g = 9,81 м/с2
.
- маса автомобіля, що припадає на задні осі, кг; g – прискорення вільного падіння, g = 9,81 м/с2
.
![]()
2.10 Діаметр плунжера
Якщо відома вантажопідйомність та тиск робочої рідини, ТО можна визначити необхідну площу плунжера, а через неї – його діаметр. Вантажопідйомність плунжера
![]() (2)
(2)
де р – тиск робочої рідини; S – площа поперечного перерізу плунжера (рис. 2).
Якщо в залежності (2) площу плунжера визначити через його діаметр ![]()
![]() та вирішити її відносно діаметра, тоді одержимо, м:
та вирішити її відносно діаметра, тоді одержимо, м:
 . (3)
. (3)
Коефіцієнт 103 , необхідний для переведення тиску, вираженого через МПа, в кПа. Для нашого прикладу
 м.
м.
Діаметр округляють до найближчого нормалізованого лінійного розміру; d » 0,24 м.
2.11 Продуктивність насосу, що обслуговує гідропідйомник
Продуктивність насосу визначається об’ємом, який звільняють плунжери підйомника при їх переміщеннях з крайнього нижнього положення до крайнього верхнього, та часом, за який це переміщення здійснюється, л/хв:
![]() , (4)
, (4)
де m – кількість стояків підйомника; h – висота підйому, м; t - час підйому, с.
За коефіцієнтом 6·104 переводять м3 /с у л/хв.
Після підстановки дістаємо
![]() л/хв.
л/хв.
За відомою продуктивністю можна вибрати конкретну модель насосу. Найчастіше використовують шестеренні насоси. Якщо існуючи насоси не відповідають потрібному, ТО розраховують його геометричні розміри, а на їх основі розробляють конструкцію насоса.
2.12 Розрахунок геометричних розмірів шестеренного насоса
Схема шестеренного насоса показана на рис 3. За вказаним напрямом обертання шестерень з нижньої порожнини насоса масло витісняється, а в верхню засмоктується. Реальна продуктивність насоса відрізняється від геометричної завдяки перетіканню масла з областей підвищеного тиску до областей зниженого:
![]() ,
,
де ηV – об’ємний коефіцієнт подачі, ηV = 0,7…0,82.
Таким чином, геометрична продуктивність насоса
![]() .
.
Легко показати, що геометрична продуктивність насосів зв’язана з його геометричними розмірами залежністю, л/хв:
![]() (6)
(6)
де mz – модуль зуба шестерні, мм; z - число зубів шестерні; n - частота обертання шестерень, хв-1 ; b - ширина шестерні або довжини зуба, м.
Задавшись частотою обертання шестерні (наприклад, n = 2500 хв-1 , можна визначити діаметр початкового кола шестерні за умовою, що лінійна швидкість не перевищує V £ 8 м/с. Це гарантує відсутність кавітації при роботі насоса, мм:
![]() (7)
(7)
Для нашого прикладу
![]()
Після округлення do ,беремо 60 мм.
Діаметр шестерні зв’язує між собою число зубів і модуль:
![]() (8)
(8)
В шестеренних насосах використовуються шестерні з числом зубів 8…15 та модулем 2…4. Для нашого випадку шестерня з числом зубів 25 і модулем 4 матиме діаметр початкового кола 60 мм, що відповідає умові V £ 8 м/с.
Таким чином, з формули (6) невідомим залишається ширина шестерні b, яку можна розрахувати, вирішивши рівняння (6) відносно b:
![]() , мм (9)
, мм (9)
![]() .
.
Після округлення b » 57 мм.
Вибір модуля, числа зубів та окружної швидкості можна вважати вдалими, якщо b/do знаходиться в межах 0,8…1,5.
Для нашого випадку b/do = 57:60 = 0,95. В іншому разі перераховані параметри коригують.
2.13 Розрахунок потужності приводного двигуна
Потужність двигуна для приводу насоса можна вирахувати через роботу, що виконує підйомник, та час, за який він цю роботу виконує:
 , (10)
, (10)
де hм – механічний коефіцієнт корисної дії всієї системи (hм =0,75…0,85).
Результат буде в кіловатах (кВт), якщо вантажопідйомність в кілоньютонах (кН):
![]() .
.
Таким чином, для підйому гідропідйомником автомобіля КамАЗ-5320 на висоту 1,8 м за 60 с потрібен двигун потужністю 3,32 кВт.
При виконанні курсового або дипломного проекту наведений обсяг розрахунків доповняють розрахунками міцності елементів підйомника.
Задача 3.1
Расчет комбинированного роликового стенда для определения тяговых и тормозных качеств автомобиля
Автомобиль ЗАЗ - 1102. Сила веса, приходящаяся на задние колеса –1360 Н. Максимальная мощность, развиваемая двигателем автомобиля, 65(2) кВт при 3200 об/мин. Крутящий момент –92,2 Н м
Радиус качения колеса 0,13 м, передаточное число главной передачи
3,875. Наружная и внутренняя колеи, соответственно 2,320 и 1,52 м.
При расчете использовать схему стенда по рис.3.1. с исключенным нагружателем.

Рис.3.1 Стенд проверки мощности:
1 и – беговой ролик; 2 –нагружатель; 3 – датчик крутящего момента; 4 – инерционная масса; 5 – тахогенератор; 6 – выталкиватель колес; 7 – колёсоотбойник.
Длина ролика стенда
lр = (2,34 – 1,24)/2 + 0,1 = 0,13 м.
Расстояние между роликами
b = 1,24 – 0,1 = 1,14 м.
Для обеспечения устойчивого положения автомобиля на стенде угол α = 30° (рис.6.4). Радиус ролика стенда принят 0,159 м.
Тогда расстояние между осями роликов (3.2.)
L = 2⋅(0,49 + 0,159) ⋅sin30° = 0,65 м.
1.Основные геометрические размеры стенда, lp = 0,65 м; Rp = 0,159 м;
L = 0,65 м; b = 1,14 м.

Рис.3.2 Схема взаимодействия колеса и роликов стенда проверки мощности.
2. Для расчета инерционной массы стенда необходимо задать дополнительные исходные данные – радиус инерционной массы Rм, момент инерции одного колеса автомобиля Jk1, передаточное отношение между роликами и массой iрм, массу автомобиля m. Если ролики стенда пустотелые – задают внутренний радиус ролика Rвн. В настоящем решении Rм=0,3 м; Jk1= 12,5 кг⋅м2; Rвн = 0,109 м; m = 4300 кг.
Параметры массы определены для двух случаев : iрм = 1 (масса закреплена на одном валу с роликом); iрм = 0,3 (ролики соединены с массой ускоряющей цепной передачей).
3. Момент инерции ролика, изготовленного из трубы
Jр1 = 3,14⋅(0,0252 – 0,0122 )2 ⋅0,65⋅7,8⋅103 /2 = 1,34 кг⋅м2.
4. Требуемый момент инерции инерционной массы определен. Если масса закреплена на одном валу с роликом
Jм = 12 ⋅(0,025⋅4300 – 1,34⋅4) + (0,025/0,24) ⋅12 ⋅(6 – 4) ⋅12,6 = 104,3 кг⋅м2.
Если ролики соединены с массой ускоряющей передачей
Jм= 0,32⋅104,3 = 9,4 кг⋅м2.
5. Ширина набора дисков инерционной массы
lм = 2⋅104,3/(3,14⋅0,34⋅7,8⋅103) = 1,04 м.
l м= 2⋅9,4/(3,14⋅0,34⋅7,8⋅103) = 0,093 м.
Очевидно, второй вариант конструкции стенда, когда ролик соединен с массой ускоряющей передачей, более предпочтителен.
6. Средняя мощность, подводимая к инерционной массе при разгоне автомобиля в интервале скоростей 50 – 60 км/ч определяется решением уравнения мощностного баланса в двух точках внешней скоростной характеристики – для скоростей 50 и 60 км/ч. В данном примере расчетные значения мощностей взяты из таблицы.
Nх = Ne − Nва − Nтр − N f − Nст,
Тогда
N = (50,0 + 57,4)/2 = 53,7 кВт.
7. Суммарный момент инерции вращающихся масс стенда, приведенный к оси роликов
JΣp=Jм′/i2рм+Jk1⋅Zk⋅R2p/R2k+Zp⋅Jp1 =
=9,4/0,32+12,6⋅4⋅0,025/0,24++4⋅1,34 = 114,9 кг⋅м2,
где Zk – число колес на роликах стенда при контроле автомобиля;
Zp – число вращающихся роликов стенда.
8. Время разгона автомобиля на стенде
t = 114,9⋅(602 – 502)/26⋅103⋅53,7⋅0,1592 = 3,66 c.
9. Максимально допустимое время разгона при снижении мощности двигателя на 15%
tм = 1,15⋅3,66 = 4,31 с.
Рассчитать основные параметры инерционного стенда проверки тормозов. При расчете использовать схему стенда по (рис.3.3.)

Рис.3.3. Инерционный стенд проверки тормозов:
1 – ролик; 2 – электродвигатель; 3 – инерционная масса; 4 – подъёмник; 5 – датчик пути и скорости; 6 – цепная передача; 7 – колёсоотбойный ролик.
1. Основные геометрические размеры стенда, lp = 0,65 м; Rp =0,159 м; l = 0,65 м; b = 1,14 м.
2. Дополнительные исходные данные, подбираемые с использованием справочных материалов : массы, приходящиеся на задние и передние колеса автомобиля соответственно, Мз =2180 кг, Мп= 2120 кг; коэффициенты сцепления шин с роликами и с дорогой, соответственно, φ = 0,56, φд = 0,6; радиус колеса автомобиля Rk = 0,49м; момент инерции колеса Jk1 = 12,6 кг⋅м2; максимальный момент, развиваемый двигателем автомобиля Мдв = 402 Н⋅м; передаточное число главной передачи автомобиля io = 6,32.
3.Моменты инерции вращающихся масс одного блока роликов стенда
Jп = 2120⋅0,56⋅0,025/2⋅0,6 – 12,6⋅0,025/0,24 = 23,39 кг⋅м2.
Jз = 2120⋅0,56⋅0,025/2⋅0,6 – 2⋅12,6⋅0,025/0,24 = 22,78 кг⋅м2.
Так как Jп > Jз, за основу для дальнейших расчетов принят Jп =23,39 кг⋅м2.
4.По результатам расчетов в предыдущем примере, момент инерции одного пустотелого ролика Jр1 = 1,34 кг⋅м2. Пусть ролики соединены с инерционной массой ускоряющей передачей iрм = 0,5. Тогда инерционная масса должна иметь момент инерции
Jм = (23,39 – 2⋅1,34) ⋅0,52 = 5,17 кг⋅м2.
5. Если масса изготовлена из стали в виде набора дисков радиусом Rм = 0,3 м, то ширина набора дисков
lм =2⋅5,17/3,14⋅0,34⋅7,8⋅103 = 0,052 м.
6. Передаточное число передачи, связывающей ролики и электродвигатель при максимальной линейной скорости автомобиля 45 км/ч
iрэ = 1500⋅0,159/2,65⋅45 = 2,0.
7. Сила веса, приходящаяся на одно колесо
Gk = Мп⋅g/2 = 2120⋅9,8/2 = 10388 Н.
8. Пусковой момент электродвигателя Мэп стенда определяется по формуле с использованием следующих исходных данных: α = 30° ; fp = 0,03; Zk =1; ηрэ =0,98; Zm = 1; iмэ = iрэ⋅iрм = 2,0⋅0,5 = 1;
Zp = 2; V = 45000/3600 = 12,5 м/с; tp = 1 c; ηтр = 0,88.
Мэп = (10388/cos 30°)⋅(0,03⋅1⋅0,159/2,0⋅0,98) + (5,17⋅1⋅12 +
1,34⋅2/22⋅0,98+12,6⋅1⋅0,025/22⋅0,24⋅0,98)⋅2⋅12,5/0,159⋅1+0,25⋅402·6,32·0,1
59/(0,88⋅0,49⋅2⋅0,98) = 388 Н⋅м.
2.13.9 Мощность электродвигателя (6.53)
N = 388⋅1500/9740⋅1,2 = 49,8 кВт.
По справочнику [2] - это двигатель 4А225МЧУ3 мощностью 55 кВт.
Задача Зд - 4.5
Выбор и расчет необходимого количества технологического оборудования для участков автопредприятия
Привыполнении этой задачи нужно для заданного участка по обслуживанию указанных автомобилей выбрать необходимое технологическое оборудование.
Назначение участка – ремонта мостов автомобиля;
Автомобиль – ЛиАЗ - 5256;
Количество – 35 шт.
1. Транспортное предприятие имеет 35 автомобилей ЛиАЗ-5256.
2. Продолжительность работы участка ремонта мостов – 8часов.
3. Коэффициент выпуска на линию – 0,6.
Продуктивность участка Пс – 1 авт/час.
Среднесуточный объем работ по сварке в зависимости от условий может меняться в широком диапазоне. Принимаем Nc -10 авт/сутки.
Необходимое количество сварочных участков определяем:
![]()
где Кн – коэффициент, который учитывает неравномерность с которой поступают автомобили в ремонт;
Kу – коэффициент использования рабочего времени стенда.
Таким образом, для выполнения рабочей программы необходим один участок ремонта мостов.
Литература
1. Кудрин А.И. Основы проектирования и эксплуатации технологического оборудования: Текст лекций.- Челябинск: Издательство ЮУрГУ, 2000. – 123 с.
2. http://paragraff.ru/platformy.html
2. http://paragraff.ru/platformy.html
Похожие рефераты:
Разработка технологии и процесса ремонта двигателей автомобиля КамАЗ 5320 на АТП
Ремонт муфты автоматического опережения впрыскивания топлива
Техническое обслуживание и ремонт автомобилей
Организация поста технического обслуживания и ремонта карбюраторов двигателей легковых автомобилей
Современные дизельные, судовые и тяжелые моторные топлива
Установки погружных центробежных насосов (УЭЦН)
Испытательная станция турбовинтовых двигателей ТВ3–117 ВМА–СБМ1 серийного производства
Модернизация двигателя мощностью 440 квт с целью повышения их технико-экономических показателей
Исследование особенностей технической эксплуатации ходовой части автомобилей "Toyota"
Оценка ассортимента и конкурентоспособности автомобилей
Двигатели стирлинга. Области применения
Исследование процесса технической эксплуатации топливных форсунок системы распределённого впрыска