| Скачать .docx |
Реферат: Научная работа: Приемно адаптерный прибор пожарной сигнализации
Девиз “Не отступать и не сдаваться! ”
Приемно-адаптерный прибор пожарной сигнализации
МИНСК 2000
ОГЛАВЛЕНИЕ
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ…………………………..2
ВВЕДЕНИЕ………………………………………………………………….3
1. ОБОСНОВАНИЕ И ЦЕЛЬ РАБОТЫ…………………………………...5
2. ПЕРСПЕКТИВЫ РАЗВИТИЯ РАННЕГО ОБНАРУЖЕНИЯ ПОЖАРА…………………………………………………………………. 12
3. ПРИБОР ПРИЕМНО-АДАПТЕРНЫЙ ПОЖАРНОЙ СИГНАЛИЗАЦИИ………………………………………………………. 16
3.1. Описание адаптера. Принцип работы. ……………………………..16
3.2 Работа с драйвером, передача информации по сети………………22
ЗАКЛЮЧЕНИЕ………………………………………………………. ……..30
ЛИТЕРАТУРА ……………………………………………………………….32
ПРИЛОЖЕНИЯ………………………………………………..…………….34
ПЕРЕЧЕНЬ УСЛОВНЫХ ОБОЗНАЧЕНИЙ
АСП – автоматическая система пожаротушения
АСУ – автоматизированная система управления
АУП – автоматическая установка пожаротушения
ВУОС - выносное устройство оптической сигнализации
ГОСТ – государственный стандарт
ГПН – государственный пожарный надзор
ИМС – интегральная микросхема
КЗ – короткое замыкание
МЧС – министерство по чрезвычайным ситуациям
ПАСО – пожарный аварийно-спасательный отряд
ПКП - приемно-контрольный прибор
ППКУ - прибор приемно-контрольный управляющий
ПС – пожарная сигнализация
ПЦН - пункт централизованного наблюдения
УМЧС – управление министерства по чрезвычайным ситуациям
ФБ – формирователь байта
ШЛЧС – штаб ликвидации чрезвычайных ситуаций
ЭВМ – электронно-вычислительная машина
ВВЕДЕНИЕ
Рост количества пожаров, тяжести и ущерба последствий от них требует разработки новых подходов к обеспечению пожарной безопасности. Существующая система обеспечения пожарной безопасности предполагала совершенствование организационно-технических мероприятий и систем пожарной безопасности объекта, которые, однако, не рассматривались в единой взаимосвязи регионов. Сложившаяся пирамидальная структура подразделений МЧС, осуществляющих защиту от аварий, пожаров, стихийных бедствий и государственный пожарный надзор в регионе для успешного выполнения поставленных задач требует кардинальных мер по обеспечению пожарной безопасности.
С каждым годом вычислительная техника оказывает все большее влияние на нашу жизнь. Такая тенденция не обошла и Министерство по чрезвычайным ситуациям Республики Беларусь. Теперь вычислительная техника – незаменимый помощник в повседневной служебной деятельности.
Персональные компьютеры используются для накопления, систематизации и анализа информации. Апробирована и используется локальная сеть в центральном аппарате МЧС (объединение 17 компьютеров в сеть), организована связь по модему («электронная почта») между министерством и управлениями, а также управлениями и некоторыми районными подразделениями. Будущее – это глобальная сеть постоянного функционирования между подразделениями МЧС всех уровней, когда данные по Республике Беларусь стекаются в центральный компьютер. Это могут быть результаты спутникового наблюдения за лесами и торфомассивами, отчеты систем раннего обнаружения пожара на всех объектах республики, данные о перемещениях пожарной техники, а также о нарушениях норм и правил, выявленных в ходе пожарно-технических обследований органов ГПН. Возможно реализовать передачу и отображение информации с объектов на компьютере (электронной карте).
АСУ будет обнаруживать, идентифицировать и точно указывать положение любых потенциальных очагов возгорания, определять маршруты эвакуации людей, а также обеспечивать скоординированное выполнение мер пожарной безопасности и защиты, предоставляя оператору ясную и точную информацию и позволяя, таким образом, своевременно принять верное решение. Возможно создание баз данных по охраняемым объектам (адрес, пароли, карты подъезда к объекту), принятым сигналам, выданным указаниям группам реагирования, времени установления нарушения. Вычислительная техника проанализирует оперативную обстановку с пожарной безопасностью, скоординирует действия подразделений МЧС, поставит задачи, определит их приоритет и выработает стратегию решения, поэтому наблюдается стремление к созданию более интеллектуальных приборов с использованием современных возможностей микроэлектроники. Главным звеном остается задача обеспечения высокого порога технологической надежности и многофункциональной работоспособности комплектов систем пожарной сигнализации. В свою очередь это определяется составляющими: типом и видом детекторов (принципом действия); качеством и типом каналов телеметрии (шлейфы); техническим решением исполнительных устройств.
Поэтому необходимо находить новые интересные пути технических решений для создания отечественных высокотехнологичных систем, которые займут достойное место, как на отечественном, так и на мировом рынке продукции.
1. ОБОСНОВАНИЕ И ЦЕЛЬ РАБОТЫ
Главная задача систем пожарной сигнализации – это сохранение жизни и здоровья людей, а также имущества. Рациональный выбор оборудования пожарной сигнализации и пожарной автоматики позволяет правильно использовать средства заказчика и обеспечивать пожарную безопасность объекта на высоком уровне.
Пожарная безопасность объекта должна обеспечиваться системой предотвращения пожара и противопожарной защитой, которые составляют единую систему его пожарной безопасности. Автоматические системы пожарной сигнализации и автоматические системы пожаротушения являются составной частью системы противопожарной защиты. И от того, насколько правильно будет выбрана та или иная система или их комбинация, зависит пожарная безопасность объекта в целом.
В соответствии с ГОСТ 12.1.004-91 «Пожарная безопасность. Общие требования» система противопожарной защиты, в том числе автоматические системы пожарной сигнализации и пожаротушения, должны обеспечивать требуемый уровень пожарной безопасности людей и материальных ценностей, а также характеризоваться экономическими критериями эффективности этих систем при защите материальных ценностей.
При этом автоматические системы пожарной сигнализации и автоматические системы пожаротушения должны выполнять одну из следующих задач:
-обеспечение пожарной безопасности людей;
-обеспечение пожарной безопасности материальных ценностей;
-обеспечение пожарной безопасности людей и материальных ценностей;
Система противопожарной защиты может быть условно разбита на ряд уровней, каждый из которых занимает определенной место в построении системы. Первый уровень – технические средства, предназначенные для обнаружения загораний (пожарные извещатели) - реагируя на первичный фактор, вызывающий возникновение загорания, осуществляют передачу сообщения на второй уровень. Второй уровень – приемно-контрольные приборы и приборы приемно-контрольные управляющие (ПКП и ППКУ) – обеспечивают сигнализацию о возникшем пожаре, передают информацию на пункт централизованного наблюдения (ПЦН) системы безопасности, обеспечивают управление автоматическими системами пожаротушения и дымоудаления, средствами звукового, речевого и светового оповещения людей, находящихся в зоне пожара (рис.1). Третий уровень – пункты централизованного наблюдения призваны решать задачу принятия решения по действию служб безопасности объекта.
Дальнейшие, более высокие уровни системы безопасности, могут охватывать не только конкретные объекты, но и некоторый комплекс объектов, город, район, область и т.д. основными техническими средствами, обеспечивающими работу этого уровня системы, являются устройства передачи и обработки информации. Здесь концентрируется информация от всех подсистем системы безопасности, и обеспечиваются координированные действия служб, призванных обезопасить защищаемый объект (производство).
Более подробно необходимо рассмотреть функции приемно-контрольных приборов:
· прием и обработка сигналов от извещателей;
· электропитание извещателей по проводному шлейфу пожарной сигнализации или отдельной линии;
· формирование извещаний «Пожар» и «Неисправность»;
· передача сигнала на пункт централизованного наблюдения;
· формирование сигнала включения систем пожаротушения и дымоудаления;
· управление звуковыми и световыми сигналами оповещателей.
Основные характеристики приемно-контрольных приборов – информационная емкость и информативность. ПКП большой информационной емкости могут использоваться для объединения сигнализации большого количества помещений одного объекта, а также в качестве пультов для автономных систем защиты объектов.
Для реализации в полном объеме требований нормативных документов при создании автоматических установок пожаротушения приборы приемно-контрольные управляющие кроме функций, приведенных выше, должны в значительной степени выполнять следующие задачи:
- формировать сигнал «Внимание» по каждому контролируемому направлению при сработке одного извещателя в шлейфе пожарной сигнализации защищаемого направления с адресным включением световой индикации и звуковой сигнализации на приемно-контрольной аппаратуре и выдачей соответствующего сигнала во внешние цепи;
- формировать сигнал «Пожар» по каждому контролируемому направлению при сработке двух извещателей в шлейфе пожарной сигнализации защищаемого направления с адресным включением световой индикации и звуковой сигнализации на приемно-контрольной аппаратуре и выдачей соответствующего сигнала во внешние цепи;
- обеспечивать регулировку временной задержки команды «Пуск» на исполнительные устройства автоматической установки пожаротушения;
- формировать сигнал «Неисправность» при обрыве или коротком замыкании пожарных шлейфов, линий связи АУП;
- обеспечивать возможность переключения режима «Автоматический пуск» – «Ручной пуск» с клавиатуры на приемно-контрольной аппаратуре управления, по команде из диспетчерской, и осуществлять отключение автоматического пуска при открывании дверей в защищаемое помещение с адресным включением световой индикации и звуковой сигнализации на приемно-контрольной аппаратуре и выдачей соответствующего сигнала во внешние цепи;
- обеспечивать возможность дистанционного пуска АУП по каждому защищаемому направлению с клавиатуры на приемно-контрольной аппаратуре, по команде из диспетчерской или дистанционных постов управления у эвакуационных выходов из защищаемого помещения.
- формировать сигнал «Тушение включено» при подаче огнетушащего вещества на каждом защищаемом направлении с адресным включением световой индикации и звуковой сигнализации на приемно-контрольной аппаратуре и выдачей соответствующего сигнала во внешние цепи;
- формировать сигнал «Дверь открыта» по каждому защищаемому направлению с адресным включением световой индикации и звуковой сигнализации на приемно-контрольной аппаратуре и выдачей соответствующего сигнала во внешние цепи;
- формировать команду «Пуск» на исполнительное устройство второй очереди АУП через определенный расчетом интервал времени после команды «Пуск» на исполнительное устройство первой очереди АУП и отсутствии сигнала о подаче огнетушащего вещества;
- обеспечивать связь с автоматизированной системой управления верхнего уровня в части выдачи информации о состоянии и режимах функционирования АУП и приема управляющей команды.
Для расширения функциональных возможностей ППК и ППКУ необходимо, чтобы эти приборы обеспечивали включение исполнительных устройств АУП различных типов (водяного тушения, газового, порошкового и др.)
Кроме того, следует обеспечить возможность включения световых и звуковых оповещателей, установленных как в административных, так и в производственных помещениях, в том числе и взрывоопасных.
Серийно выпускаемые приемно-контрольные приборы, как правило, имеют жесткую структуру, работают лишь с радиальными шлейфами и с не адресуемыми пожарными извещателями, не обеспечивают документирование информации о загорании и техническом состоянии системы пожарной сигнализации. Практически отсутствуют устройства, в полной мере реализующие весь комплекс функций по управлению АУП.
В этих условиях создание пожарных приемно-контрольных приборов и на их основе систем пожарной сигнализации с высокими эксплуатационными характеристиками является одной из важнейших задач разработчиков.
Современный ПКП должен иметь ярко выраженное интеллектуальное аналитическое ядро системы, обеспечивающее оценку состояния и корректировку аналоговых параметров всех компонентов системы, для повышения надежности систем такого класса, что и определило цель моей работы: повышение надежности и эффективности пожарной защиты объекта, сокращение времени идентификации места возгорания, определения к нему путей подъезда и подхода, автоматизация контроля за состоянием установок автоматического пожаротушения, улучшение социальных условий труда оперативного персонала.
|


 |
|
 |
|
![]()
Рис.1. Обобщенная блок-схема приемно-контрольного прибора с подключенными к нему цепями
1- шлейф сигнализации;
2- выносной элемент;
3- извещатель;
4- приемно-контрольный прибор;
5- узел переключения;
6- узел контроля состояния шлейфа сигнализации;
7- узел памяти;
8- узел обработки сигнала;
9- узел сигнального (пультового реле);
10- узел управления звуковым оповещателем;
11- узел управления световым оповещателем;
12- устройство объектовое системы передачи извещения или другого ПКП;
13- звуковой оповещатель;
14- световой оповещатель;
15- источник резервного питания;
16- блок питания;
17- узел индикации;
18- выносное индикационное табло;
19- узел питания извещателя.
Серийно выпускаемые приемно-контрольные приборы, как правило, имеют жесткую структуру, работают лишь с радиальными шлейфами и с не адресуемыми пожарными извещателями, не обеспечивают документирование информации о загораниях и техническом состоянии системы пожарной сигнализации. Практически отсутствуют устройства, в полной мере реализующие весь комплекс функций по управлению АУП.
В этих условиях создание пожарных приемно-контрольных приборов и на их основе систем пожарной сигнализации с высокими эксплуатационными характеристиками является одной из важнейших задач разработчиков.
Современный ПКП должен иметь ярко выраженное интеллектуальное аналитическое ядро системы, обеспечивающее оценку состояния и корректировку аналоговых параметров всех компонентов системы для повышения надежности систем такого класса, что и определило цель моей работы: повышение надежности и эффективности пожарной защиты объекта, сокращение времени идентификации места возгорания, определения к нему путей подъезда и подхода, автоматизация процессов контроля состояния установок автоматического пожаротушения, улучшение социальных условий труда оперативного персонала.
2. ПЕРСПЕКТИВЫ РАЗВИТИЯ РАННЕГО
ОБНАРУЖЕНИЯ ПОЖАРА
В настоящее время наиболее перспективна адресно-аналоговая система пожарной сигнализации. Пожарный извещатель анализирует состояние контролируемой зоны, передает параметры своего состояния в момент опроса от прибора (активная телеметрия), поддерживая непрерывную связь с приемно-контрольным прибором. Анализируя процессы, приемно-контрольный прибор, как интеллектуальное ядро системы, принимает необходимые решения и реализует запрограммированный алгоритм по взаимодействию с другими компонентами системы (датчиками, модулями, установками пожаротушения) с использованием адресной идентификации. В адресных системах используются специальные типы датчиков, либо блоки адресных шлейфов. Противопожарная система с адресуемыми устройствами контролирует адресуемые входные (датчики пламени, дыма, газа) и управляет выходными (система пожаротушения, сигнализаторы тревоги, системы отключения вентиляции) компонентами. Наличие адреса у каждого устройства позволяет практически мгновенно получать точную информацию о пожарной сигнализации, неисправности датчика и эффективно осуществлять управлением процессом пожаротушения.
Имеющиеся в составе системы контрольные платы, входные и выходные адресующие устройства позволяют создавать практически любую структуру связи (кольцевую, линейную, древовидную с любым количеством разветвлений), т.е. приспосабливать к системам связи, существующим на предприятии. Использование в системе связи малого количества проводов повышает устойчивость работы системы, этому же служит наличие программного контроля правильности функционирования всех блоков и устройств, включая извещатели. Перспективны также технические средства, выполняющие функции приемно-контрольных приборов и приемно-передающих устройств с возможностью «гибкого» управления алгоритмом работы и изменяемых (настраиваемых) электрических характеристик устройства. Разработанная базовая программа информационного обмена представлена в приложении 1.
Промышленностью Республики Беларусь адресно-аналоговые извещатели в данный момент не выпускаются, что является существенным барьером в области развития концепции отечественной адресно-аналоговой системы пожарной сигнализации. Хорошей альтернативой им являются блоки адресных шлейфов.
Основными тенденциями развития данных систем являются:
-применение иерархических структур с развитыми устройствами межуровневой связи;
-создание программируемых устройств, адаптируемых к конкретным условиям применения;
-использование кольцевых и комбинированных шлейфов пожарной сигнализации;
-создание адресных извещательных систем, позволяющих однозначно определить место возникновения загорания;
-подключение систем пожарной сигнализации к информационно-измерительной и управляющей системе объекта защиты;
-повышение контролепригодности технических систем пожарной сигнализации;
-применение принципов дистанционного контроля и управления;
-обеспечение возможности документирования информации;
Большие возможности в решении указанных вопросов дает применение микропроцессорной и вычислительной техники. Ее использование позволяет создавать автоматизированные системы пожарной безопасности, строящиеся по иерархическому принципу. На верхнем уровне этой системы решаются задачи распознавания и предотвращения пожарных ситуаций, а на нижней – задачи обнаружения загораний, управления АУП, контроля их работоспособности и предотвращение ложных срабатываний. Примером такой системы является одна из последних разработок - панель охранно-пожарной сигнализации американской фирмы ControlEquipment (см. Приложение 2).
Назрела необходимость, в поиске путей для объединения усилий отечественных производителей в области производства систем пожарной сигнализации и автоматики с целью создания надежной (работа даже в случае возникновения неисправностей) высококачественной продукции, которая должна быть доступной для широкого круга отечественных потребителей. Система должна обеспечивать комплексное управление, обеспечивать простоту и экономичность монтажа, точность срабатывания (снижение вероятности ложной тревоги, предоставление достоверной информации, точное указание источника потенциальной опасности), легкость управления, универсальность использования (наличие конфигураций для объектов любой величины и любого назначения). Сегодня обязательно необходимо учитывать при разработке и производстве техники пожарной сигнализации такие важные параметры, как:
- наличие в приборах пожарной сигнализации аналитического ядра «мозга» приемно-контрольного прибора;
- использование в шлейфах пожарной сигнализации и установках пожаротушения специальных технических решений для защиты от ложных срабатываний;
- возможность настройки шлейфов на работу с различными типами пожарных извещателей;
- возможность универсального использования приемно-контрольного прибора с блокировкой управления технологическим оборудованием, системой аварийного оповещения и др.;
- наличие функций для передачи информации на компьютер, удаленные пульты управления модулями автоматики пожаротушения, релейные блоки, устройства концентрации в интегральные системы безопасности, пульты централизованного наблюдения и др.;
- использование режимов постоянного контроля неисправности (обрыв, короткое замыкание, блокировка и др.);
- использование совместных протоколов обмена в коммуникационные соединения;
- простота и удобство обслуживания и эксплуатации;
- высокая эксплуатационная надежность;
- возможность применения специального программного обеспечения для повышения информативности в системе МЧС;
Отечественный и зарубежный опыт эксплуатации автоматических систем пожарной сигнализации показывает, что проблема раннего обнаружения пожара в настоящее время не может быть успешно решена с помощью только одного или нескольких типов пожарных извещателей. Для этого требуется создание комплекса средств обнаружения загораний по всем информационным факторам и признакам пожара и поиск новых технических решений в области пожарной сигнализации.
3. ПРИБОР ПРИЕМНО-АДАПТЕРНЫЙ
ПОЖАРНОЙ СИГНАЛИЗАЦИИ
3.1. Описание адаптера. Принцип работы.
Для передачи состояния пожарного извещателя на расстояние с выводом информации на компьютер необходимо задействовать часть функций приемно-контрольного прибора, при этом появляются новые функции (формирование байтов кодовой посылки и передача сигналов с компьютера на ПКП), т.е. непосредственно с пожарного извещателя через адаптерный прибор осуществить передачу информационного байта нецелесообразно.
Первичное звено обработки сигнала с пожарного извещателя и опроса состояния шлейфов – это приемно-контрольный прибор; в моей работе – это ППК-2.
Прибор приемно-контрольный ППК-2 предназначен для приема сигналов тревожных извещаний от автоматических и ручных пожарных извещателей с нормально-замкнутыми и нормально-разомкнутыми контактами, а также от активных пожарных извещателей с бесконтактным выходом (см. рис.2), формирующих сигнал о пожаре в виде дискретного уменьшения электрического сопротивления выходной цепи извещателя до величины, не превышающей 450 Ом при токе 20 мА (например, РИД-6М, ДИП-2, ИПР, ДИП-3).
Пульт обеспечивает отображение поступающей с охраняемых объектов информации (сигналы ПОЖАР, НЕИСПРАВНОСТЬ) с помощью оптических индикаторов и звукового сигнализатора, трансляцию поступивших сигналов с помощью контактов реле, а также формирование адресных сигналов пуска АСП.

Рис. 2. Схема подключения пожарных извещателей
к сигнальной линии прибора ППК-2.
1 - извещатель с нормально замкнутыми контактами (типа ИП 104-1, ИП 105-2/1 и т.п.);
2 - извещатель ИП 212-2 (ДИП-2);
3 - извещатель ИП 101-2, ИП 212-5 (ДИП-3);
4 - извещатель с нормально разомкнутыми контактами (ПИО-017);
5 - извещатель РИД-6М;
6 - извещатель ИП 329-2 "Аметист";
7 - выносное устройство оптической сигнализации ВУОС (ТеУ5.142.004); Р1 - резистор МЛТ-0,25-11 кОм ±5%: Р2 - резистор МЛТ-0.25-4.3 кОм ±5 %; УД1-УД2 - диоды полупроводниковые КД521А.
Основные технические данные ППК-2
1. Максимальное количество шлейфов сигнализации, подключаемых
к пульту, шт. 60
2. Максимальное количество активных пожарных извещателей, включаемых
в один шлейф, шт. 20
3. Максимальное количество пожарных извещателей, включаемых
в один шлейф, с нормально-замкнутыми и с нормально-разомкнутыми контактами, шт. 40
4. Максимальное сопротивление шлейфа, Ом 500
5. Амплитуда переменного напряжения прямоугольной формы в
шлейфе, В 20+4
6. Длительность длинного полутакта напряжения в шлейфе, с 0,7+0,15
7. Длительность короткого полутакта напряжения в шлейфе, с 0,05+0,01
8. Максимально-допустимая величина тока в шлейфе в дежурном режиме
при длинном полутакте напряжения, мА 10
9. Напряжение в линии АСП при включении сигнала пуска АСП, В 24+2
10. Величина тока ограничения в линии АСП, А 0,3+0,05
11. Величина времени задержки включения реле ОПОВЕЩЕНИЕ с
момента поступления сигнала ПОЖАР, с 35
12. Максимальный ток, коммутируемый контактами реле ОПОВЕЩЕНИЕ, при напряжении до 250 В, А 2
13. Максимальная мощность, коммутируемая контактами реле ПОЖАР, НЕИСПРАВНОСТЬ при напряжении до 80 В, Вт 10
14. Напряжение источников питания:
основного – сети переменного тока частотой 50Гц, В 220+22
резервного – источника постоянного тока, В 24+2,4
15. Максимальная потребляемая мощность пульта в дежурном режиме от источника питания:
основного, В А 40
резервного, Вт 40
16. Минимальное сопротивление изоляции между сетевыми цепями пульта и другими токопроводящими элементами, МОм 20
17. Диапазон эксплуатационных температур окружающей среды
пульта, 0 С 0 +40
18. Максимальная относительная влажность окружающей среды пульта при
температуре 350 С, % 80
19. Максимальная масса пульта на 60 сигнальных линий, кг 25
20. Наработка на отказ пульта (в пересчете на 1 сигнальную линию) должна
быть ,ч 50
21. Срок службы пульта, лет 10
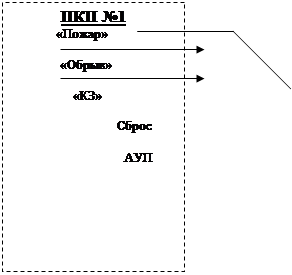
Основной узел взаимодействия ППК-2 и адаптерного прибора – Блок приема и регистрации, включающий в себя два независимых канала обработки сигналов, поступающих с сигнальных линий. С соответствующих контуров: «Пожар», «КЗ», «Обрыв», «АУП» (прямая и обратная связь) логический уровень поступает на регистры приема адаптера, что обеспечивает селективность адаптера по виду сигнала (см. Приложение 3).
Информация с блока приема и регистрации с разъема ПКП поступает на входные регистры формирователя информационного байта связанного с этим ПКП, затем – на приемо-передающий контроллер, где с учетом сработавшего направления, формируется и отправляется на компьютер через последовательный порт СОМ2 байт посылки. Компьютер принимает байт (для приема и обработки информации, поступающей на порт СОМ2, в памяти резидентно находится драйвер адаптера), выдает соответствующее сообщение на экран монитора (принтер). Связь с компьютером ПАСО, охраняющего объект осуществляется по индивидуальной кабельной линии, а дальнейшее прохождение информации – по телефонной линии при помощи модема.
Специально разработанное программное обеспечение позволит оператору управлять пуском АУП и состоянием приемно-контрольного прибора того или иного объекта через адаптер от компьютера после набора пароля, при этом предполагается наличие у оператора элементарных навыков работы на компьютере. В процессе функционирования прибора по каждому событию на объекте формируется запись в банк-протокол текущих событий, где информация о событии сформирована по признаку даты (места) и содержит:
а) время возникновения события;
б) наименование сигнала;
в) установившееся состояние сигнала.
Банк протоколов текущих событий можно просмотреть на экране монитора или распечатать в виде суточной сводки.
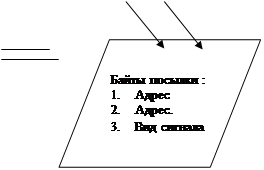
Структурно адаптер состоит (рис.3) из формирователей байтов, имеющих непосредственную связь с определенным ПКП при помощи кабеля (провода) и разъемов; приемо-передающего контроллера сбора и обработки информации, передающего сообщение по интерфейсу последовательного типа на IBM-совместимый компьютер для последующей обработки и хранения информации о событиях на контролируемом объекте, а также для адресного восстановления состояния ПКП и запуска АУП по команде оператора ЭВМ.
Электрическую схему приемно-адаптерного прибора можно реализовать на дискретных элементах и ИМС, что позволит выполнить его с небольшими габаритными размерами и высокой безотказностью в работе.
Таким образом, при работе с адаптерным прибором имеется возможность «гибкого» управления алгоритмом работы и изменения некоторых его характеристик как за счет регулировки параметров элементной базы, так и с компьютера (программно).
 |
Приемно-адаптерный прибор
 |
|
|
![]()
![]()
![]()
|
|
|

 |
|
![]()
![]()
![]()
![]()
![]() Шл.№n
Шл.№n
 |
||
 |
||
 ПАСО
ПАСО
![]()
![]()

|
![]()
![]()
![]() 10000011 – ПКП №1
10000011 – ПКП №1
![]()
![]()
![]() 10001001 - «КЗ»
10001001 - «КЗ»
![]()
![]()
![]()
![]() стартовые биты стоповые биты
стартовые биты стоповые биты

Рис. 3. Схема информационного обмена.
3.2 Работа с драйвером, передача информации по сети.
Драйвер обеспечивает расшифровку байта данных поступающего с формирователя байта адаптера, обработку информации и выдаст сообщение на экран (принтер). Алгоритм программы может быть успешно реализован на языках высокого уровня Turbo Pascal 7.0 или С++ с применением ассемблерных вставок, при этом обеспечится удобный графический интерфейс программы управления, четкость работы, рациональность алгоритма программы, автозапуск и резидентность.
Драйвер резидентно располагается в памяти компьютера, постоянно опрашивает состояние порта, осуществляет обработку информации, поступающей от адаптера и отображение ее на экране монитора. Неотъемлемым звеном работы этой системы является интерфейс RS-232-C и, в частности, порт последовательной передачи данных СОМ2 для соединения с ком.Последовательная передача данных означает, что данные передаются по единственной линии. При этом биты байта данных передаются по очереди с использованием одного провода. Для синхронизации группе битов данных обычно предшествует специальный стартовый бит, после группы битов следуют бит проверки на четность и один или два стоповых бита. Иногда бит проверки на четность может отсутствовать.
Существует три основных способа соединения с компьютером для обмена информацией:
- непосредственная связь через асинхронный порт;
- связь с использованием модема;
- связь через локальные сети.
Далее рассматриваются первые два типа соединений непосредственное и соединение через модем.
Практически каждый компьютер оборудован хотя бы одним последовательным асинхронным адаптером. Обычно он представляет собой отдельную плату или же расположен прямо на материнской плате компьютера. Его полное название - RS-232-C. Каждый асинхронный адаптер обычно содержит несколько портов, через которые к компьютеру можно подключать внешние устройства. Каждому такому порту соответствует несколько регистров, через которые программа получает к нему доступ, и определенная линия IRQ (линия запроса прерывания) для сигнализации компьютеру об изменении состояния порта. Каждому порту присваивается логическое имя (COM1,COM2,и т.д.).
Компьютер IBM PC поддерживает интерфейс RS-232-C не в полной мере; скорее разъем, обозначенный на корпусе компьютера как порт последовательной передачи данных, содержит некоторые из сигналов, входящих в интерфейс RS-232-C и имеющих соответствующие этому стандарту уровни напряжения.
В настоящее время порт последовательной передачи данных используется очень широко. Вот далеко не полный список применений:
- подключение мыши;
- подключение графопостроителей, сканеров, принтеров, дигитайзеров;
- связь двух компьютеров через порты последовательной передачи данных с использованием специального кабеля и таких программ, как FastWire II или Norton Commander;
- подключение модемов для передачи данных по телефонным линиям;
- подключение к сети персональных компьютеров;
Последовательная передача данных означает, что данные передаются по единственной линии. При этом биты байта данных передаются по очереди с использованием одного провода. Для синхронизации группе битов данных обычно предшествует специальный стартовый бит, после группы битов следуют бит проверки на четность и один или два стоповых бита. Иногда бит проверки на четность может отсутствовать.
Компьютер может быть оснащен одним или двумя портами последовательной передачи данных. Эти порты расположены либо на материнской плате, либо на отдельной плате, вставляемой в слоты расширения материнской платы.
Бывают также платы, содержащие четыре или восемь портов последовательной передачи данных. Их часто используют для подключения нескольких компьютеров или терминалов к одному, центральному компьютеру. Эти платы имеют название "мультипорт".
В основе последовательного порта передачи данных лежит микросхема INTEL 8250 или ее современные аналоги - INTEL 16450,16550,16550A. Эта микросхема является универсальным асинхронным приемопередатчиком (UART - Universal Asynchronous Receiver Transmitter). Микросхема содержит несколько внутренних регистров, доступных через команды ввода/вывода.
Микросхема 8250 содержит регистры передатчика и приемника данных. При передаче байта он записывается в буферный регистр передатчика, откуда затем переписывается в сдвиговый регистр передатчика. Байт "выдвигается" из сдвигового регистра по битам.
Программа имеет доступ только к буферным регистрам, копирование информации в сдвиговые регистры и процесс сдвига выполняется микросхемой UART автоматически.
К внешним устройствам последовательный асинхронный порт подключается через специальный разъем. Существует два стандарта на разъемы интерфейса RS-232-C, это DB-25 и DB-9. Первый имеет 25, а второй 9 выводов. Для работы приемно-адаптерного прибора используется 25-штырьковый разъем.
ТАБЛИЦА 1.
Разводка разъема DB25
Номер Назначение контакта Вход или
контакта (со стороны компьютера) выход
1 Защитное заземление (Frame Ground,FG) -
2 Передаваемые данные (Transmitted Data,TD) Выход
3 Принимаемые данные (Received Data,RD) Вход
4 Запрос для передачи (Request to send,RTS) Выход
5 Сброс для передачи (Clear to Send,CTS) Вход
6 Готовность данных (Data Set Ready,DSR) Вход
7 Сигнальное заземление (Signal Ground,SG) -
8 Детектор принимаемого с линии сигнала
(DataCarrierDetect,DCD) Вход
9-19 Не используются
20 Готовность выходных данных
(DataTerminalReady,DTR) Выход
21 Не используется
22 Индикатор вызова (Ring Indicator,RI) Вход
23-25 Не используются
ТАБЛИЦА 2 .
Разводка разъема DB9
![]()
![]()
![]()
![]()
![]() Номер Назначение контакта Вход или
Номер Назначение контакта Вход или
контакта (со стороны компьютера) выход
1 Детектор принимаемого с линии сигнала
(Data Carrier Detect, DCD) Вход
2 Принимаемыеданные (Received Data, RD) Вход
3 Передаваемые данные (Transmitted Data, TD) Выход
4 Готовность выходных данных
(Data Terminal Ready, DTR) Выход
5 Сигнальное заземление (Signal Ground, SG) -
6 Готовность данных (Data Set Ready, DSR) Вход
7 Запрос для передачи (Request to send, RTS) Выход
8 Сброс для передачи (Clear to Send, CTS) Вход
9 Индикатор вызова (Ring Indicator,RI) Вход
Компьютер является терминальным устройством. Модем (адаптер ПС) является устройством связи.
Стандарт RS-232-C определяет возможность управления потоком только для полудуплексного соединения, при котором в каждый момент времени данные могут передаваться только в одну сторону.
Технические параметры интерфейса RS-232-C
При передаче данных на большие расстояния без использования специальной аппаратуры из-за помех, наводимых электромагнитными полями, возможно возникновение ошибок. Вследствие этого накладываются ограничения на длину соединительного кабеля между устройствами DTR-DTR и DTR-DCE.
Официальное ограничение по длине для соединительного кабеля по стандарту RS-232-C составляет 15,24 метра. Однако на практике это расстояние может быть значительно больше. Оно непосредственно зависит от скорости передачи данных.
110бод - 1524м / 914,4м
300бод - 1524м / 914,4м 1200бод - 914,4м / 914,4м 2400бод - 304,8м / 152,4м 4800бод - 304,8м / 76,2м 9600бод - 76,2м / 76,2м
Уровни напряжения на линиях разъема составляют для логического нуля -15..-3 вольта, для логической единицы +3..+15 вольт. Промежуток от -3 до +3 вольт соответствует неопределенному значению.
Порты асинхронного адаптера
На этапе инициализации системы, модуль POST BIOS тестирует имеющиеся асинхронные порты RS-232-C и инициализирует их. В зависимости от версии BIOS инициализируются первые два или четыре порта. Их базовые адреса располагаются в области данных BIOS, начиная с адреса 0000:0400h.
Первый адаптер COM1 имеет базовый адрес 3F8h и занимает диапазон адресов от 3F8h до 3FFh. Второй адаптер COM2 имеет базовый адрес 2F8h и занимает адреса 2F8h..2FFh.
Асинхронные адаптеры могут вырабатывать прерывания:
COM1, COM3 - IRQ4
COM2, COM4 - IRQ3
Имеется 7 основных регистров для управления портами:
а) Регистр данных
Регистр данных расположен непосредственно по базовому адресу порта RS-232-C и используется для обмена данными и для задания скорости обмена.
Для передачи данных в этот регистр необходимо записать передаваемый байт данных. После приема данных от внешнего устройства принятый байт можно прочитать из этого же регистра (см. Приложение 1).
В зависимости от состояния старшего бита управляющего регистра (расположенного по адресу base_adr+3, где base_adr соответствует базовому адресу порта RS-232-C),назначение этого регистра может изменяться. Если старший бит равен нулю, регистр
используется для записи передаваемых данных. Если же старший бит равен единице, регистр используется для ввода значения младшего байта делителя частоты тактового генератора. Изменяя содержимое делителя, можно изменять скорость передачи данных. Старший байт делителя записывается в регистр управления прерываниями по адресу base_adr+1.
Максимальная скорость обмена информацией, которую можно достичь при использовании асинхронного адаптера, достигает 115200 бод, что примерно соответствует 14 Кбайт в секунду.
б) Регистр управления прерываниями
Этот регистр используется либо для управления прерываниями от асинхронного адаптера, либо (после вывода в управляющий регистр байта с установленным в 1 старшим битом) для вывода значения старшего байта делителя частоты тактового генератора.
в) Регистр идентификации прерывания
Считывая его содержимое, программа может определить причину прерывания
г) Управляющий регистр
Управляющий регистр доступен по записи и чтению. Этот регистр управляет различными характеристиками UART: скоростью передачи данных, контролем четности, передачей сигнала BREAK, длиной передаваемых слов (символов).
д) Регистр управления модемом
Регистр управления модемом управляет состоянием выходных линий DTR, RTS и линий, специфических для модемов - OUT1 и OUT2, а также запуском диагностики при соединенных вместе входе и выходе асинхронного адаптера.
е) Регистр состояния линии
Регистр состояния линии определяет причину ошибок, которые могут возникнуть при передаче данных между компьютером и микросхемой UART.
ж) Регистр состояния модема
Регистр состояния модема определяет состояние управляющих сигналов, передаваемых модемом асинхронному порту компьютера.
Инициализация асинхронного адаптера
Первое, что должна сделать программа, работающая с асинхронным адаптером - установить формат и скорость передачи данных. После загрузки операционной системы для асинхронных адаптеров устанавливается скорость 2400 бод, не выполняется проверка на четность, используются один стоповый и восьмибитовая длина передаваемого символа. Можно изменить этот режим командой MS-DOS MODE.
Выполнив ввод из управляющего регистра, программа может получить текущий режим адаптера. Для установки нового режима измените нужные вам поля и запишите новый байт режима обратно в управляющий регистр.
Если вам надо задать новое значение скорости обмена данными, перед записью байта режима установите старший бит этого байта в 1, при этом регистр данных и управляющий регистр используются для задания скорости обмена. Затем последовательно двумя командами ввода загрузите делитель частоты тактового генератора. Младший байт запишите в регистр данных, а старший - в регистр управления прерываниями.
Перед началом работы необходимо также проинициализировать регистр управления прерываниями, даже если в вашей программе не используются прерывания от асинхронного адаптера (см. Приложение 1). Для этого сначала надо перевести регистр данных и регистр управления прерываниями в обычный режим, записав ноль в старший бит управляющего регистра. Затем можно устанавливать регистр управления прерываниями. Если прерывания вам не нужны, запишите в этот порт нулевое значение.
Электронная почта
Большой интерес представляет использование приемно-адаптерного прибора в локальной сети АСУ МЧС как средства обработки и дальнейшего анализа информации. Одной из возможностей сети является организация электронной почты. Если компьютер подключен к сети, и вы имеете специальное программное обеспечение для обмена почтой, имеется возможность отправлять через сеть письма (сообщения) другим пользователям сети (рис. 3).
Само письмо представляет собой обычный файл, содержащий текст письма и специальный заголовок, в котором указано, от кого письмо направлено, кому предназначено, какая тема письма и дата отправления. Автоматизировать данный процесс несложно при наличии программного обеспечения обмена данными по сети на компьютерах.
ЗАКЛЮЧЕНИЕ
В результате разработки приемно-адаптерного прибора пожарной мною проанализирован отечественный и зарубежный опыт раннего обнаружения пожара при помощи автоматических систем пожарной сигнализации, основные технические решения в этой области, перспективы развития, пути оптимизации и повышения надежности работы систем пожарной сигнализации. В данной работе в качестве одного из вариантов решения проблемы раннего обнаружения пожара в рамках концепции создания АСУ МЧС Беларуси предложен проект приемно-адаптерного прибора пожарной сигнализации.
При его использовании достигается:
1). Повышение эффективности использования установок автоматического пожаротушения и сигнализации;
2). Сокращение времени реагирования оперативного персонала на экстремальную информацию;
3). Ведение бланка протоколов событий;
4). Улучшение социальных условий труда.
На программном уровне обеспечивается документирование информации о загораниях и техническом состоянии системы пожарной сигнализации, ведется банк протоколов текущих событий, осуществляется дистанционное управление приемно-контрольным прибором, и пуском АУП. Возможна автоматизация контроля состояния установок автоматического пожаротушения. Адаптер прост и удобен в эксплуатации, в определенной степени сможет составить конкуренцию зарубежным приборам. Необходимо глубже проработать вопрос об универсальности подключения прибора к различным типам ПКП.
Несомненно, его применение на объектах хозяйствования даст положительный эффект в улучшении информативности в системе МЧС, а следовательно и повышении пожарной безопасности. Массовое внедрение системы в жилых домах, квартирах, дачах, общежитиях, гостиницах, промышленных предприятиях и других помещениях с постоянным проживанием людей и пребыванием персонала позволит существенно сократить число погибающих (уменьшение времени обнаружения, прибытия), а в сочетании с комплексом других профилактических мер либо исключить их, либо свести к минимуму.
ЛИТЕРАТУРА
1. ГОСТ 12.1.004-91. Пожарная безопасность. Общие требования.
2. ГОСТ 12.3.046 Установки пожаротушения автоматические. Общие требования.
3. Касаткин А.И. Профессиональное программирование на языке СИ. Управление ресурсами: Справочное пособие. – Мн.: Выш. Шк., 1992.
4. Малешин В.Г. Аппаратно-программные комплексы систем автоматического контроля и управления процессами пожаротушения, пожарной сигнализации//Пожарная безопасность. Материалы первой республиканской научно-практической конференции, -Мн.; 1994г.
5. Нилов В.А. Технические средства охранно-пожарной сигнализации.; НОУ «Такир», -М., 1998г.
6. Панель охранно-пожарная «ControlEquipment». Техническое описание.
7. Пожарная безопасность. Специализированный каталог. – М.: «Гротек», 2000г.
8. Пожарная сигнализация. Современные устройства пожарной сигнализации. Проектирование систем безопасности на основе компьютерных технологий.; «Гротеск», -М, 1998г.
9. Пожарно-охранный извещатель «ApolloXP95». Техническое описание.
10. Пульт приемно-контрольный ППК-2. Паспорт еу2.407.003 ПС.
11. Руководство по архитектуре IBMPC/AT. под ред. М.Л.Махрхасина.; ООО «Консул», -Мн., 1993г.
12. СНиП 2.04.09-84 Пожарная автоматика.
13. Собурь В.А. Установки автоматической пожарной сигнализации: Справочник. Вып. 1-й – М.: Спецтехника, 1999.
14. Современные средства пожарной и пожарно-охранной сигнализации.; -М, 1990г.
15. СТБ 11.16.01-98 Системы пожарной сигнализации.
16. Юлин В.А., Булатова И.Р. Приглашение к СИ. – Мн.: Выш. Шк.,
1990.
ПРИЛОЖЕНИЕ 1
// ======================================================================
// = Базовая программа работы с последовательным портом COMi.
// = Обмен с использованием прерываний
// ======================================================================
#include <conio.h>
#include <iostream.h>
#include <stdio.h>
#include <dos.h>
#include <stdlib.h>
#include <math.h>
#include <string.h>
#include <process.h>
#define COM 2 // задается номер порта 1-COMi; 2-COM2
// дальнейший код справедлив для машин класса AT
#define INTRS 13-COM
#define m_speed 2 // множитель задает скорость передачи
// 1-9600
// 2-19200 и т.д.
// 6-57600
// 12-115200
#define cbuf 2000 // размер буфера данных
#ifdef __cplusplus
#define __CPPARGS ...
#else
#define __CPPARGS
#endif
#define rgmask 16/COM //маска в регистре маски прерываний
#define byte_sync 33
#define byte_pream 85
int IMR=0x21; // регистр маски прерываний
int base,IER,IIR,LCR,LSR,MSR,MCR,LSB,MSB; // регистры контроллера
// последовательного интерфейса
char fl_d=0; // флаг устанавливается если принят байт
// если=0 то буфер пуст
char overb=0; // флаг устанавливается если буфер переполнен
chararea[cbuf]; // буфер данных
int head=0,teil=0; // указатели головы и хвоста
char count0=0; // help count
char exiterr=0; //номер ошибки при приеме
// exiterr=0 - ошибок нет
// exiterr=1 - ошибка приема
// exiterr=2 - ошибка по тайм-ауту
// exiterr=3 - cбой в приеме: передано неверное
//число байт
// exiterr=4 - сбой при приeмe или переполнение
//буфера
char errcode=0; // код ошибки
void interrupt obrcom(__CPPARGS); /* interrupt prototype */
void interrupt (*oldfunc)(__CPPARGS); /* interrupt function pointer */
void nevid(void); //делает курсор невидимым
void initrs(void); //инициализация COM порта
void init(void); //инициализация переменных
void exitp(void); //!!! необходимо вызывать перед выходом из программы
int trans(char); //передача байта через СОМ порт
void deside(void); //обработка данных
voidsignal(void); //звуковой сигнал
void outinfo(void); //вывод информации на экран
void reseterr(void); //сброс ошибок RS232
void instvect(void); //Замена вектора прерываний COMi
void restorevect(void); //Восстановление старого обработчика C
void incteil(void); //Увеличение указателя хвоста
void err(char *); //Выход по ошибке
void Transb(char); // посылка байта с сервисом
int Transb_hiden(char); // Не выдает сообщения об ошибках
void clearbof(void); // очистка буфера данных
void definit(void); // определяет работоспособность с той стороны
void clearbofkey(void); // очистка буфера клавиатуры
void pusk(void);
struct k_win // координаты окна
{ int x0,y0,x1,y1,lastx,lasty; } wmain,wmes;
//=======================
void nevid(void) //невидимый курсор
{ asm{ push cx
push ax
mov ah,01
mov ch,20H
mov cl,0
int 10H
pop ax
popcx
}
}
// =========== инициализация переменных ====================
void init(void)
{ int i;
wmain.x0=1; wmain.y0=1; wmain.x1=80; wmain.y1=16;
wmes.x0=1; wmes.y0=wmain.y1+2; wmes.x1=80; wmes.y1=25;
wmain.lastx=wmain.lasty=wmes.lastx=wmes.lasty=1;
exiterr=0;
}
//============ инициализация последовательного порта ===========
voidinitrs(void)
{
asm { push es
push bx
mov bx,COM
dec bx
shl bx,1
mov ax,40H //вычислить базовый адрес
mov es,ax
mov dx,es:[bx]
mov base,dx
pop bx
pop es
}
IER=base+1; IIR=base+2; LCR=base+3; MCR=base+4; LSR=base+5;
MSR=base+6; LSB=base; MSB=base+1;
disable();
instvect(); // установить обработчик
outportb(IMR,(inportb(IMR)&(255-rgmask))); // разрешить прерывание
outportb(IER,5); //разрешить прерывания по доступности данных и по ошибке
outportb(LCR,(inportb(LCR)|0x80)); // доступ к делителю частоты
outportb(LSB,12/m_speed); // 1843200/(x*16)=y бит/c
outportb(MSB,0);
outportb(LCR,27); // установить параметры :
// длина слова обмена 8 бит + контроль четности + DLAB=0
outportb(MCR,(8)); // ;rts=0 ;dtr=0
// сбросить условия возникновения прерываний
//outportb(base,0);
inportb(base);
inportb(MSR);
inportb(LSR);
enable();
}
//=========== звуковой сигнал ==================
void signal(void)
{ sound(700); delay(200); nosound();
}
// чтение LSR - сброс ошибок
void reseterr(void)
{
inportb(LSR);
}
char foi=0;
// ================= передача байта 'dm' в канал связи ==========
int trans(char dm)
{
inlsr:
asm {
mov dx,base
add dx,5
in al,dx //прочитать LSR
test al,00011110B // ошибка ?
jnz toer
test al,1
jnz indata
test al,32 // Передатчик освобожден ?
jzinlsr
sub dx,5
mov al,dm
out dx,al
}
return 0;
toer: reseterr(); return -1;
indata: return 1;
}
voidinstvect(void) // замена вектора прерывания
{
oldfunc = _dos_getvect(INTRS);
_dos_setvect(INTRS,obrcom);
}
// восстановление старого вектора
void restorevect(void)
{ /* restore to original interrupt routine */
_dos_setvect(INTRS,oldfunc);
}
char d;
//=========== прием данных не используя прерываний =============
int priem(void)
{ char clt; int i=0;
do { clt=inportb(LSR);
if ((clt&30)!=0) { errcode=clt; reseterr(); return -1; }
// байт принят ?
if (clt&1) { d=inportb(base); return 0; }
i++;
}
while (i!=0);
return 1;
}
// новый обработчик прерывания от COMi
void interrupt obrcom(__CPPARGS)
{ char p;
p=((inportb(IIR)>>1)&3);
switch (p) // определить тип прерывания
{ case 0: // изменение линии состояния устройства с той стороны
inportb(MSR); break;
case 1: // прерывание от передатчика
break;
case 3: // по ошибке
errcode=inportb(LSR); inportb(base); break;
case 2: // доступность данных
{ area[head++]=inportb(base); //записать байт в буфер
if (head==cbuf) head=0;
if (head==teil) overb=1; // отметить если голова догнала
// хвост
fl_d=1; // отметить заполнение буфера
break;
};
default: // неизвестное прерывание
errcode=128;
}
enfin: // завершить прерывание
asm { moval,20H
out 20H,al
}
}
// очищает буфер данных
void clearbof(void)
{ while (fl_d) incteil(); }
void clearbofkey(void)
{ while (kbhit()) getch(); }
// Выход по ошибке
void err(char *mes)
{
exitp(); clearbofkey();
printf("%s\n",mes); exit(0);
}
// Увеличение указателя хвоста
void incteil(void)
{ if (teil==(cbuf-1)) teil=0; else teil++;
asm cli;
if (head==teil) fl_d=0; // если буфер пуст
asm sti;
}
// посылка байта с ожиданием и с очищением буфера
// от байта который был послан
voidTransb(charCC)
{ int li,opf,hp;
li=1; opf=0;
do // цикл посылки и ожидания освобождения передатчика
{ hp=trans(CC);
switch (hp)
{ case 0: opf=1; break;
case 1: li++; hp=inportb(base); break;
case -1: { printf("Ошибка при передаче\n"); reseterr(); break;}
}
if (li==0) printf("Тайм-аут при передаче\n");
}
while (!opf);
}
// посылка байта с ожиданием и с очищением буфера
// от байта который был послан
// Не выдает сообщения об ошибках
int Transb_hiden(char CC)
{ int li,opf,hp;
li=0; opf=0;
do // цикл посылки и ожидания освобождения передатчика
{ hp=trans(CC);
switch (hp)
{ case 0: opf=1; break;
case 1: { //доступность данных
li++;
inportb(base);
reseterr;
break;
};
case -1: return -1; //err("Ошибка при передаче"); break;
}
if (li==100) return 1; //err("Тайм-аут при передаче");
}
while (opf==0);
// цикл ожидания приема байта - того что был послан
li=0;
while (fl_d==0)
{
if (++li==0) return 2; //err("Тайм-аут Не принято ни 1 символа");
}
if (area[teil]!=CC) return 3; //err("Не принято то что послано");
incteil();
return 0;
}
void priembig(void)
{ int a;
a=priem();
switch (a)
{ case 0: printf("Принято %d\n",d); break;
case 1: printf("Тайм-аут\n"); break;
case -1: printf("ErorCode=%d\n",errcode); inportb(base);
}
}
#define pi 3.1416
// Возвращает главное значение ARCTAN [0..2*pi]
double mARCTAN(double z_sin,double z_cos)
{ double ang;
if (z_sin==0)
{ if (z_cos<0) return (pi/2.0);
else return (1.5*pi);
}
ang=-atan(z_cos/z_sin);
if (z_sin<0) ang+=pi;
if (ang<0) ang+=2*pi;
return ang;
}
char getsym(void)
{ char a;
a=area[teil]; incteil();
return a;
}
//---------------------------------
void exitp(void) //!!! необходимо вызывать перед выходом из программы
{
disable();
reseterr();
outportb(MCR,8); //rts=0 out2=1
restorevect(); // восстановить обработчик
outportb(IMR,(inportb(IMR)|rgmask)); // запретить прерывание
enable();
}
int get_size(void) // возвращает число байт в буфере
{ int i;
if ( (i=(head-teil))<0 ) i+=cbuf;
return i;
}
//===== отобразить информацию ==================
void outinfo(void)
{ char a; char str1[40];
while ( (get_size()>=1) & (!kbhit()) )
{
printf(" %X",(int)getsym());
if (errcode!=0) { printf("ErrCode=%d\n",errcode);
errcode=0;
}
}
}
struct dostime_t w,w1;
doubleat,bt;
void fix_time(void) // фиксирует системное время во внутреней переменной
{
_dos_gettime(&w);
at=(double)(w.hour*360000+w.minute*6000+w.second*100+(double)w.hsecond);
}
double get_time(void) // возвращает время прошедшее с момента последнего
// фиксирования
{
_dos_gettime(&w1);
bt=(double)(w1.hour*360000+w1.minute*6000+w1.second*100+(double)w1.hsecond);
bt-=at;
return bt;}
int wait(int x)
{ fix_time();
while (get_size()<x)
{ if (get_time()>(double)(x*4)) return 0;
}
return 1;}
#define Esc 27
#define sym_S 83
#define sym_W 87
#define sym_Z 90
#define sym_A 65
//====================================
void main(void)
{ char hpl,hph,ch; char mas[100];
int j,i,jh;
long li;
int cos,sin,sh,am;
double sr;
// printf("my_dt=%7.4f \n",(mARCTAN(14927.0,-28113.0)/pi*2000));
// return ;
init(); initrs();
clrscr();
Transb(85);
Transb(6);
Transb(0);
while (!kbhit()) // { Transb(85); delay(100); }
outinfo();
me:
errcode=0;
clearbofkey();
exitp();
}
Аннотация научной работы
Девиз: "Не отступать и не сдаваться!"
1. Приемно-адаптерный прибор пожарной сигнализации.
2. УДК 614.842.4
3. КИИ МЧС Республики Беларусь.
4. 2000 год.
5. Объём работы: 44 с.
6. Количество приложений: 3
7. Количество иллюстраций: 3
8. Количество таблиц: 2
9. Источников литературы: 16.
Характеристика работы.
1. Цель: Обеспечение возможности автоматизированной компьютерной обработки информации систем пожарной сигнализации.
2. Методы: анализ технических решений, опытно-конструкторская проработка, программирование.
Основные результаты: разработан проект конструкции приемно-адаптерного прибора пожарной сигнализации и программа информационного обмена.
Наличие документа об использовании научных результатов: да.
подпись автора ______________
СВЕДЕНИЯ
об авторе и научном руководителе работы,
представленной под девизом: «Не отступать и не сдаваться!»
АВТОР НАУЧНЫЙ РУКОВОДИТЕЛЬ
1.Хегстрем 2.Сергей 3.Сергеевич 4. 4 5. 220118, Республика Беларусь, г. Минск, улица Машиностроителей, 25. |
1.Мисюкевич 2.Николай 3.Стефанович 4.Командно-инженерный институт Министерства по чрезвычайным ситуациям Республики Беларусь 5. 05 6. 1 7. 2 8. 220075, г. Минск, улица А. Бачило 5, кв. 68 |
Председатель конкурсной комиссии ______________
Научный руководитель ______________
Автор работы ______________
Сведения о научной работе
1. Приемно-адаптерный прибор пожарной сигнализации.
2. 45
3. УДК 614.842.
4. 2
5. нет.
6. да.
7. нет.
8. нет.
9. Пожарная автоматика. Пожарная сигнализация. Приемно-контрольное оборужование.
Автор _____________
Научный руководитель _____________