| Похожие рефераты | Скачать .docx |
Реферат: Розрахунок рами методом переміщень
Міністерство освіти і науки України
Полтавський національний технічний університет імені Юрія Кондратюка
Факультет будівельний
Кафедра будівельної механіки
КОНТРОЛЬНА РОБОТА
Розрахунок рамиметодом переміщень
Виконав студент Швець О.В.
КерівникШкурупій О.А.
Полтава 2004
Вибір шифру та розрахункової схеми за номером залікової книжки 01058
Перша цифра шифру – це цифра 4 – остання із суми усіх цифр залікової книжки: 0+1+0+5+8=14.
Друга цифра шифру – це цифра 4 – остання із суми усіх цифр залікової книжки без урахування першої: 1+0+5+8=14.
Третя цифра шифру – це цифра 8 – визначається як остання з усіх цифр номера залікової книжки.
Остаточно шифр варіанта – 448.
Номер розрахункової схеми визначається двома останніми цифрами номера залікової книжки, від яких треба відняти 48: 58-48=10. Отже, номер розрахункової схеми – 10.
Вихідні дані:
l
= 12 м;h
= 10 м; ![]() = 1,6;
= 1,6;
q2 = 12 кН/м; F2 = 60 кН; F4 = 20 кН.
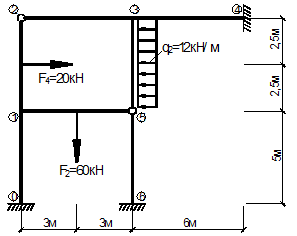
Мал. 1 - Розрахункова схема
Введемо позначення ![]() – погонна жорсткість стержня:
– погонна жорсткість стержня:
![]() ;
; ![]() .
.
1. Кінематичний аналіз заданої системи та визначення кількості невідомих методу переміщень
Визначимо ступінь свободи системи
![]() ,
,
де Д – кількість дисків;
Ш – кількість простих шарнірів;
В0 – кількість опорних в’язей.
Ступінь статичної невизначеності системи ![]() .
.
Отже, дана рама є 6 раз статично невизначною і може бути геометрично незмінна.
Аналіз геометричної структури заданої рами
Рама складається із трьох дисків, кожен із яких опираються на нерухому основу за допомогою затиснення, тому система є геометрично незмінною.
Визначення ступеня кінематичної невизначеності
Ступінь кінематичної невизначності системи визначається кутовими (n в ) та лінійними незалежними переміщеннями вузлів системи (n л ). Кількість кутів повороту дорівнює кількості жорстких вузлів системи, а кількість лінійних незалежних переміщень – кількості ступенів свободи умовної шарнірно-стрижньової системи, яка утворюється шляхом розташування шарнірів у всіх жорстких вузлах заданої системи, включаючи й опорні затиснення. Таким чином, ступінь кінематичної невизначеності системи (n ) дорівнює
п = пв + пл =2+1 = 3.
Система тричі кінематично невизначна.
За основні невідомі методу переміщень приймаємо кутові переміщення жорстких вузлів і лінійні переміщення вузлів заданої системи, які позначимо Z1 , Z2 iZ3 – кількість невідомих дорівнює ступеню її кінематичної невизначеності:

2. Вибір основної системи методу переміщень
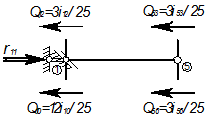
Основну систему методу переміщень вибираємо шляхом накладання у вузли системи в’язей, які заперечують кутові та лінійні переміщення цих вузлів. Для того, щоб відрізнити накладені в’язі від в’язей розрахункової схеми рами, будемо позначати їх подвійними лініями.
В жорстких вузлах заданої розрахункової схеми накладають в’язь, яка заперечує кутове переміщення вузла, але не заперечує лінійному переміщенню вузлів системи. В напрямку лінійних переміщень у вузлах накладаються в’язі, які заперечують лінійні переміщення, але не заперечують кутові переміщення жорстких вузлів системи (мал. 2).

Мал. 2 - Основна система методу переміщень
3. Рівняння методу переміщень
Для основної системи методу переміщень запишемо канонічні рівняння у вигляді системи лінійних алгебраїчних неоднорідних рівнянь:
 (1)
(1)
де ![]() – реактивне зусилля, яке виникає в і
-тій накладеній в’язі від зміщення j
-тої в’язі на величину Zj
= 1;
– реактивне зусилля, яке виникає в і
-тій накладеній в’язі від зміщення j
-тої в’язі на величину Zj
= 1;
![]() –реактивне зусилля в і
-тій накладеній в’язі, від зовнішнього навантаження.
–реактивне зусилля в і
-тій накладеній в’язі, від зовнішнього навантаження.
Зміст канонічних рівнянь:
– першого – реактивне зусилля в 1 в’язі від лінійного зміщення Z 1 , кутових переміщеньZ 2 іZ 3 та зовнішнього навантаження дорівнює нулю;
– другого – реактивний момент в 2 в’язі від лінійного зміщення Z 1 , кутових переміщеньZ 2 іZ 3 та зовнішнього навантаження дорівнює нулю;
– третього – аналогічно другому рівнянню.
У матричній формі система (1) має вид
![]() ,
,
 ;
; ;
; ;
;
де ![]() - матриця жорсткості;
- матриця жорсткості;
![]() - вектор основних невідомих;
- вектор основних невідомих;
![]() - вектор реактивних зусиль накладених в’язей в основній системі.
- вектор реактивних зусиль накладених в’язей в основній системі.
4. Визначення елементів матриці коефіцієнтів і вектора вільних членів канонічних рівнянь методу переміщень та їх перевірка
Побудова епюр згинаючих моментів в основній системі методу переміщень від одиничних значень основних невідомих (мал. 3)

Мал. 3
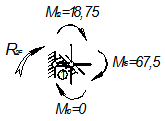
Визначення коефіцієнтів матриці жорсткості (мал. 4, 5, 6, 7, 8, 9, 10, 11, 12).
Мал. 4
![]() :
:
![]() .
.

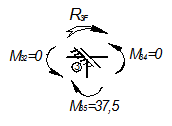
Мал. 5
![]() :
:
![]() .
.

Мал. 6
![]() :
:
![]() .
.

Мал. 7
![]() :
:
![]() .
.

Мал. 8
![]() :
:
![]() .
.

Мал. 9
![]() :
:
![]() .
.

Мал. 10
![]() :
:
![]() .
.

Мал 11
![]() :
:
![]() .
.

Мал. 12
![]() :
:
![]() .
.
Перевірка коефіцієнтів матриці жорсткості
 .
.
 ;
;
![]()
![]() ;
;
![]()
![]() .
.
Отже, коефіцієнти матриці жорсткості визначено вірно.
Визначення елементів вектора вільних членів
Для цього в основній системі будуємо епюру згинальних моментів від заданого зовнішнього навантаження (мал. 13, 14, 15).


Мал. 13
![]() :
:
![]() .
.
Мал. 14
![]() :
:
![]() .
.
Мал. 15
![]() :
:
![]() .
.
Перевірка вектора вільних членів (мал. 16)
 .
.

Мал. 16
![]()
![]() ;
;
![]()
![]()
![]() ;
;
![]()
![]() .
.
Отже, вектор вільних членів визначено вірно.
Маємо 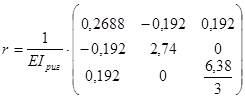 ;
; .
.
5. Розв’язання канонічних рівнянь методу переміщень та перевірка рішення
 (2)
(2)
Після рішення системи (2) одержимо:
 Або
Або  .
.
Перевірка:
![]() ;
;
![]() .
.
![]() ;
;
![]() .
.
![]() ;
;
![]() .
.
6 . Побудова епюр внутрішніх зусиль для заданої системи та їх кінематична і статична перевірка
Згідно принципу суперпозиції, епюру згинаючих моментів для заданої системи будуємо таким чином (мал. 17, 18, 19, 20)
![]() .
.

Мал. 17
1. Кінематична перевірка згинаючих моментів для заданої системи
Для виконання кінематичної перевірки, побудуємо епюру внутрішніх зусиль, від одиничного значення невідомого – Х1 , в обраній основній системі методу сил.

Мал. 18
![]()
![]() .
.
Відносна похибка:
![]() .
.
Висновок: епюру M побудовано вірно.
2. Статична перевірка епюри М
Мал. 19
![]() :
:
![]() .
.

Мал. 20
![]() :
:
![]() .
.
Висновок: епюру M побудовано вірно.
Епюру поперечних зусиль (Q ) будуємо з використанням епюри згинаючих моментів для заданої системи

Мал. 21
Епюру поздовжніх зусиль N будуємо шляхом використання умов рівноваги окремих вузлів системи (мал. 21, 22, 23).
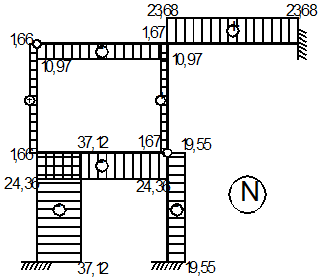
Мал. 22
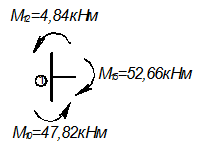
Статична перевірка поперечних та поздовжніх зусиль для заданої системи

Мал. 23
![]() :
:
![]() ;
;
![]() :
:
![]() .
.
7 . Побудова деформованої схеми рами
Згідноепюри M , значень Z1 , Z2 , Z3 будуємодеформовану схему рами (мал. 24)

Мал. 24
Література
1. Смирнов А.Ф., Александров А.В., Лащеников Б.Я., Шапошников Н.Н. Строительнаямеханикастержневых систем. – М.: Стройиздат, 1981.
2. Дарков А.В., Шапошников Н.Н. Строительнаямеханика. – 8-е изд., перераб. и доп. – М.: Высшая школа, 1986.
3. Киселев В.А. Строительнаямеханика, общий курс – 4-е изд., исправленное и доп. – М.: Стройиздат, 1986.
4. Бутенко Ю.И., Канн С.Н., Пустовойтов В.П. и др. Строительнаямеханикастержневых систем и оболочек. – К.: Вища школа, 1980.
5. Строительнаямеханика. Руководство к практическимзанятиям / Подред. Ю.И. Бутенко. – К.: Вища школа, 1989.
6. Руководство к практическимзанятиям по курсу строительноймеханики (статическиопределимые и неопределимыесистемы) / Подред. Г.К. Клейна. – 3-е изд., перераб. и доп. – М.: Высшая школа, 1973.
7. Методичні вказівки та контрольні завдання з дисципліни „Будівельна механіка (спецкурс)” для студентів денної форми навчання. Частина 2 (статично невизначні системи) / Полтава: ПНТУ, 2003. Укладачі: О.А. Шкурупій, Б.П. Митрофанов, А.М. Пащенко.
Додаток

Мал. 25 - Розрахункова схема, епюри внутрішніх зусиль для заданої рами

Мал. 26 - Основна система методу переміщень та епюри згинаючих моментів від одиничних переміщень та заданого навантаження в основній системі
Похожие рефераты:
Облік та аудиту комерційних банках
Исторические основы криптологии
Оборудование летательных аппаратов
Створення вагонів нового покоління. Візок для високошвидкісного руху
Застосування принципу можливих переміщень та принципу Даламбера до розв'язування задач
Основы проектирования и конструирования
Проектування монолітного п’ятнадцятиповерхового будинку
Організація виробництва в підприємствах агропромислового комплексу
Діагностика системи запалення ДВЗ
Дисертація: вимоги до написання та захист
Сучасні напрямки і методи відновлення здоров'я жінок у післяпологовому періоді