| Скачать .docx |
Реферат: Подъемно-транспортные машины 2
Грузоподъемные машины и механизмы предназначены для перемещения грузов и людей по вертикали и передачи их из одной точки площади, обслуживаемой машиной, в другую. Конструкции таких машин чрезвычайно разнообразны. Их можно классифицировать по конструктивным признакам, по назначению, по характеру выполняемой ими работы. Для подъема груза на небольшую высоту (до 0,8—1 м) служат простейшие грузоподъемные механизмы — домкраты, обычно применяемые при ремонтных и монтажных работах. Привод домкратов может быть ручным и механическим. Различают винтовые, рычажно-реечные, зубчато-реечные и гидравлические домкраты. На рис. 4, а в качестве примера показано устройство ручного винтового домкрата на салазках, облегчающих его точную установку под грузом. Использование винтовой пары с самотормозящей резьбой, обеспечивающей удержание поднятого груза, является причиной низкого коэффициента полезного действия (кпд), равного 0,3— 0,4. Подъемный стальной винт 3 домкрата ввернут в гайку 4, укрепленную в корпусе 7. На верхней части винта установлена рифленая головка 5, которая может поворачиваться относительно винта. Вращение винта 3 производится рукояткой 6 с двусторонней трещоткой W. В зависимости от положения трещотки, фиксируемой кулачком 9, осуществляют вращение винта в одну или в другую сторону. Корпус домкрата в нижней части имеет опорную плиту— гайку, перемещающуюся по направляющим при вращении винта горизонтального перемещения. Вращение этого винта производится рукояткой 2, снабженной трещоткой 8. Грузоподъемность винтовых домкратов колеблется от 2 до 20 т. Сила, необходимая для привода домкрата, определяется из условия равенства момента, создаваемого рабочим на приводной рукоятке, и момента от сил трения в резьбе и между головкой 5 и верхней частью винта. Широко распространены также гидравлические домкраты (рис. 4, б). Они имеют высокий кпд 0,75—0,8), малые габариты и массу, обеспечивают плавный подъем и спуск груза при весьма точной его фиксации в необходимом положении. Грузоподъемность гидравлических домкратов достигает 200 т. Недостатками их являются ограниченная высота подъема груза и малые скорости. Гидравлический домкрат с ручным приводом состоит из скалки 6, снабженной в верхней части упорной головкой 1. Скалка входит в цилиндрическую часть корпуса 5, в нижнюю часть которого плунжерным насосом 4 через систему отверстий и клапанов подается рабочая жидкость (обычно масло). Насос работает от рукоятки 2, при качании которой перемещается плунжер 3 насоса, и жидкость через нагнетательный клапан поступает в пространство между скалкой и дном корпуса. Для опускания скалки необходимо рукоятку 2 отклонить за пределы рабочего положения. При этом открывается выпускной клапан и жидкость под воздействием силы тяжести груза перетекает из-под скалки в запасной резервуар. Изменяя отклонение рукоятки, изменяют степень открытия отверстия выпускного клапана и таким образом регулируют скорость опускания груза. Числовое значение скорости подъема груза определяется количеством рабочей жидкости, подаваемой под скалку 6 в единицу времени. Так как скорость подъема груза при ручном приводе весьма невелика, то при больших высотах подъема и больших грузоподъемностях гидравлические домкраты имеют механизированный привод.

К простейшим грузоподъемным механизмам относятся также и лебедки, предназначающиеся для подъема, опускания или подтягивания грузов, а также для обслуживания различных погру- зочно-разгрузочных и монтажных работ. Лебедки могут использоваться как самостоятельные механизмы при погрузочно-разгру-
зочных, ремонтных и строительно-монтажных работах, так и в качестве силового оборудования для комплектации различных подъемных устройств (кранов, подъемников и т. п.). В зависимости от исполнения лебедки можно подразделить: по типу привода — на лебедки с ручным и машинным приводом; по типу тягового
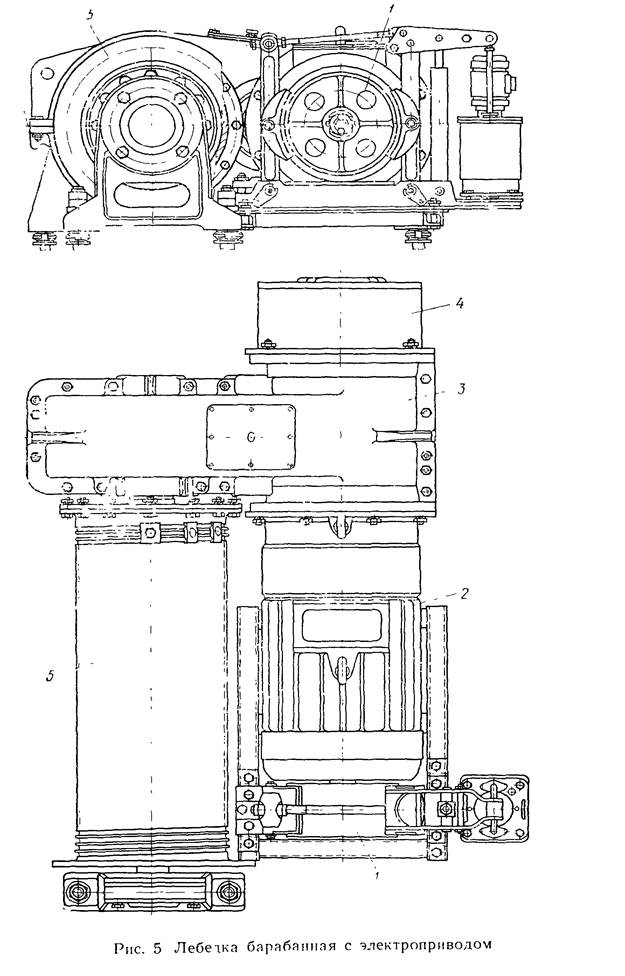
элемента— на канатные и цепные; по типу установки — на неподвижные (закрепленные на полу, стене, потолке) и передвижные (на тележках, передвигающихся по полу или по подвесным путям); по числу барабанов — на одно-, двух- и многобарабанные лебедки; по типу барабана — на нарезные, гладкие и фрикционные. На рис. 5 изображена лебедка с приводом от фланцевого
электродвигателя 2, укрепленного на корпусе редуктора 3. Соединение быстроходного вала редуктора с валом двигателя осуществлено с помощью зубчатой муфты, расположенной внутри корпуса редуктора. На свободном конце вала двигателя установлен шкив / колодочного тормоза, приводимого в действие электрогидравлическим толкателем. На выходном валу редуктора установлен барабан 5 с закрепленным на нем концом каната. При включении двигателя приводится во вращение барабан 5 лебедки; при этом канат, к которому прикрепляется груз, наматывается на барабан или сматывается с него, производя подъем или спуск груза. Направление вращения барабана изменяют реверсированием электродвигателя. На втором конце быстроходного вала редуктора установлен электроиндукционный (вихревой) тормоз 4, например типа ТМ.-4, предназначенный для плавного регулирования скорости опускания груза. Такие лебедки широко используются при монтажных, ремонтных и строительных работах. В пассажирских подъемниках находят применение лебедки с канатоведущим шкивом (рис. 6), в ручьи которого ложатся ветви грузового каната, и передача тяговой силы осуществляется посредством силы трения, возникающей .между канатом и поверхностью ручья. При малых грузоподъемности и скорости подъема груза применяют лебедки с ручным приводом, в которых вращение барабана осуществляется с помощью приводных рукояток с тормозом, автоматически останавливающим барабан при прекращении вращения рукоятки. При производстве маневровых работ на железнодорожных путях, в портах и доках, для подъема якорей на судах, при подтаскивании различных грузов и т. п. большое
применение находят шпили (рис. 7) — лебедки с фрикционным бара6аном, имеющим горизонтальную или вертикальную ось вращения. Канат, на конце которого приложена рабочая нагрузка, не закреплен на барабане, как в обычных лебедках, а сцепляется с ним силой трения, возникающей между поверхностью барабана и несколькими витками каната, намотанными на него. Это позволяет
работать с канатом большой длины при малых размерах барабана.
Имеются элекгрошпили со встроенным вспомогательным барабаном для навивки каната (рис. 7,6). В этих конструкциях три-четыре витка тягового каната обвивают фрикционный барабан 2, и через отклоняющий блок 4 канат подается к вспомогательному барабану 6, который приводится в движение вспомогательным двигателем 7 небольшой мощности, снабженным электромагнитным тормозным ycтpoйcтвoм. 

Фрикционный барабан 2 приводится во вращение основным двигателем 8 через зубчатый редуктор 9. Управление обоими двигателями осуществляется с помощью рукоятки управления 3 контроллера 5. При подтягивании груза (режим
«навивки») оба двигателя (основной и вспомогательный) вращаются одновременно. Частота вращения вспомогательного двигателя устанавливается автоматически и соответствует частоте вращения фрикционного барабана. При режиме «сматывания каната» основной двигатель вращается в обратном направлении, а вспомогательный двигатель продолжает развивать вращающий момент в прежнем направлении и поддерживает канат в натянутом
состоянии.
 Для внутрицехового и межцехового транспортирования грузов, обслуживания поточных и автоматических линий, станков и т. п. применяются компактные подъемные лебедки — тали, имеющие ручной, электрический или пневматический приводы. Тали устанавливают стационарно или на передвигающихся тележках. На рис. 8 показана таль с ручным приводом. Ее подвешивают к опоре за крюк 3. Привод тали осуществчяют с помощью бесконечной цепи 7, находящейся в зацеплении с приводным колесом 4. В качестве грузового элемента в таких талях используют пластинчатую цепь или сварную калиброванную цепь. Поднятый груз удерживают в неподвижном состоянии дисковым тормозом 5, который замыкается весом транспортируемого груза. В этом случае ступицу цепного колеса 4 выполняют в виде гайки, зажимающей храповое колесо 6 тормоза. Собачку 2 тормоза
Для внутрицехового и межцехового транспортирования грузов, обслуживания поточных и автоматических линий, станков и т. п. применяются компактные подъемные лебедки — тали, имеющие ручной, электрический или пневматический приводы. Тали устанавливают стационарно или на передвигающихся тележках. На рис. 8 показана таль с ручным приводом. Ее подвешивают к опоре за крюк 3. Привод тали осуществчяют с помощью бесконечной цепи 7, находящейся в зацеплении с приводным колесом 4. В качестве грузового элемента в таких талях используют пластинчатую цепь или сварную калиброванную цепь. Поднятый груз удерживают в неподвижном состоянии дисковым тормозом 5, который замыкается весом транспортируемого груза. В этом случае ступицу цепного колеса 4 выполняют в виде гайки, зажимающей храповое колесо 6 тормоза. Собачку 2 тормоза
укрепляют на корпусе тали.
 Для перемещения груза по горизонтали тали подвешивают к тележкам, перемещающимся по подвесным однорельсовым путям, выполненным из проката двутаврового сечения. Тележки выполняют без привода (при грузоподъемности до 1 т их передвигают, а также с ручным или механическим приводом.
Для перемещения груза по горизонтали тали подвешивают к тележкам, перемещающимся по подвесным однорельсовым путям, выполненным из проката двутаврового сечения. Тележки выполняют без привода (при грузоподъемности до 1 т их передвигают, а также с ручным или механическим приводом.
Грузоподъемность электроталей составляет 0,25—15 т, скорость подъема 5—25 м/мин. Скорость горизонтального передвижения талей устанавливают в зависимости от длины пути и назначения тали. На рис. 9 представлен общий вид электротали ТЭ грузоподъемностью до 5 т, обеспечивающей подъем груза на высоту 3—18 м
со скоростью 8 м/.мин; скорость передвижения (при управлении с пола) равна 20 м/мин. Механизм подъема этой электротали (рис.
10) состоит из электродвигателя 2, статор которого запрессован в нарезной барабан 1, вследствие чего уменьшается длина тали и ее масса. Через двухпарный соосный редуктор 3 крутящий момент ротора двигателя передается на барабан. Таль оборудована двумя тормозами: стопорным колодочным электромагнитным тормозом 4 и автоматическим спускным дисковым тормозом 7, замыкаемым весом транспортируемого груза. Тормозной шкив 5 стопорного тормоза 4, снабженный лопастями 6, укреплен на консоли быстроходного вала редуктора и выполняет роль
вентилятора, охлаждающего обмотки двигателя. Для улучшения охлаждения корпус редуктора 3 дополнительно снабжен охлаждающими ребрами. Соединение барабана с выходным валом редуктора осуществлено с помощью зубчатой муфты 8, компенсирующей неточности монтажа. Со стороны, противоположной редуктору, расположен шкаф электроаппаратуры 14, в котором располагаются
пускатели механизма передвижения 10 и механизма подъема 11, кольцевой токоподвод 12 и конечные выключатели 13 подъема и опускания, ограничивающие крайние верхнее и нижнее положения крюка. Кабель управления вводится в шкаф электроаппаратуры
через отверстие 9. Крепление 15 каната на барабане осуществлено с помощью коуша с заливкой. Редуктор 3 и шкаф электроаппаратуры соединены между собой сварным корпусом 16. Правилами Госгортехнадзора установлено, что все вновь
изготовляемые грузоподъемные машины, предназначенные для выполнения работ, требующих точности и осторожности при посадке грузов, должны иметь соответствующие малые скорости механизмов подъема и передвижения. В этом случае электротали оборудуют так называемым микроприводом, обеспечивающим при наличии нормальной :скорости подъема и опускания также возможность
работы с весьма малыми скоростями, необходимыми для точной установки деталей на станках или приспособлениях для сборочных и монтажных работ. Изменение (.-корости подьема и опускания обеспечивается применением многополюсного двигателя или вспомогательного двигателя малой мощности, приводящего в движение барабан через дополнительные передачи, а также с помощью
механического устройства — включением дополнительной передачи
через фрикционную муфту. Новая конструкция электротали ВНИИПТМЛШ ТЭ-500
грузоподъемностью 5 т изображена на рис. 11, а. Барабан 2 расположен
между фланцевым одно- или двухскоростным электродвигателем 1
серии 4А с пристроенным конусным тормозом и планетарным редуктором 3. Основная скорость подъема груза равна 12 м/мин. Для получения малой скорости подъема A,2 м/мин при двухскоростном .1вигателе или 7,5 м/мин при односкоростном двигателе) таль снабжена дополнительным электродвигателем 4 с
редуктором, устанавливаемым на торце основного редуктора 3. При работе
на малой скорости редуктор малой скорости работает как двухступенчатый редуктор с передачей вращения на редуктор основного подъема. При работе на основной скорости подъема включаются одновременно оба двигателя. В двухскоростных талях между редуктором основного подъема и редуктором малой скорости устанавливается грузоупорный тормоз, включаемый в работу только
при спуске груза на малой скорости. Таль выпускается для высот подъема от 6,3 до 32 .м, что осуществляется за счет изменения длины барабана и размеров корпуса тали. С целью повышения безопасности работы таль снабжена ограничителем грузоподъемности пружинно-рычажного типа с установкой уравнительного блока на эксцентриковой втулке.В большинстве случаев электротали подвешивают к тележкам с ручным или электрическим приводом и управляют или снизу
 (рис. 11, а) при скорости передвижения до 32 м/мин, или при
(рис. 11, а) при скорости передвижения до 32 м/мин, или при
большей скорости — из кабины управления, перемещающейся вместе с
талью по подвесному пути (рис. 11,6). Однорельсовые тележки с талями находят широкое применение для передачи грузов между цехами, для подачи грузов на склад или со склада в цех, для загрузки вагранок, подачи земли и т. п.
В качестве грузозахватного приспособления электротали могут
иметь крюк, подъемный электромагнит или специальный захват для штучных или сыпучих грузов. Для снижения размеров зубчатых передач талей применяют высококачественные легированные стали (хромоникелевые, хромистые и т. п.). При скорости передвижения, превышающей 32 м/мин, механизм передвижения тележки снабжается стопорным тормозом. При меньших скоростях
механизм передвижения работает без тормоза.

Все большее применение в промышленности получают тали g пневмоприводом Имеются тали, в корпусе которых, представляющем собой полый цилиндр, размещен полиспаст, использующий в качестве тягового органа стальной канат. К одному концу каната подвешивают груз; второй конец закреплен неподвижно в корпусе тали. При подаче сжатого воздуха в цилиндр подвижные и непо-
23 движные блоки расходятся, в результате чего происходит подъем
груза. При выпускании воздуха блоки сближаются под действием веса груза и груз опускается. В других типах талей с пневмоприво- дом применяется воздушный двигатель со звездообразно расположенными цилиндрами. Тали с пневмоприводом позволяют производить плавное (бесступенчатое) регулирование скорости подъема и опускания груза в весьма широких пределах. Они незаменимы и при работе во взрывоопасной среде.
При необходимости подъема груза по определенной траектории применяют подъемники, в которых подъем груза производится в клетях (кабинах), на платформах или в бадьях, перемещающихся в жестких направляющих в вертикальном или близком к вертикальному направлении. Траектория движения груза в подъемниках определяется очертанием направляющих и в процессе
работы не изменяется. Подъемники, перемещающие груз по вертикали, называются лифтами. Их применение в различных отраслях народного хозяйства непрерывно расширяется. Лифты используют для погрузочно-разгрузочных работ в складских помещениях, в шахтах и рудниках для вспомогательного подъема и
опускания людей и грузов; при производстве строительных работ, эксплуатации
многоэтажных и высотных зданий, телевизионных башен, радиорелейных мачт,
метеорологических вышек. Пассажирский лифт (рис. 13) состоит из кабины 14, движущейся в жестких вертикальных направляющих 12, предохраняющих кабину от раскачивания кабину в сучас обрыва несущего каната 15 с помощью специальных ловителей 13. Срабатывание ловителей происходит при превышении кабиной расчетной скорости опускания, для чего лифт снабжается ограничителем скорости 3, работающим от специального каната, соединенного с кабиной и через блок ограничителя и блок 7, установленный в нижней части шахты. Привод 2 .лифта располагается в машинном отделении в верхней части шахты. Для уменьшения потребной мощности двигателя обычно применяют противовесы 10, масса которых равна массе кабины и половине массы полсшого груза. Противовесы движутся по своим направляющим 9. В нижней части шахты располагаются буферные устройства 8 — для кабины и 5 — для противовеса. Аппаратура управления (магнитная станция) 1 располагается в шкафу около привода. Крайнее верхнее и нижнее положения кабины ограничиваются установкой конечных выключателей 4 и 6. Для подачи электроэнергии к системе управления, расположенной в кабине, используется гибкий кабель 11. Номинальная грузоподъемность пассажирских лифтов устанавливается по принципу свободного заполнения полезной площади пола кабины. При этом масса человека принимается равной 80 кг, а грузоподъемность лифта для обычных жилых зданий составляет 350—500 кг. Номинальная скорость движения кабины регламентируется
государственными стандартами в зависимости от типа лифта. Для лифтов в
зданиях, имеющих 6—10 этажей, скорость составляет, как правило, 0,65 м/с при односкоростном приводе; лифты в 10—14-этажных зданиях имеют скорость 1 м/с и двухскоростной привод. В высотных зданиях скорость перемещения кабины находится в пределах
1,4—5,6 м/с в зависимости от этажности.
