| Похожие рефераты | Скачать .docx |
Курсовая работа: Определение оптимального режима работы машины и указание рекомендуемый диапазон технологических и конструктивных параметров многоковшового роторного траншейного экскаватора
Федеральное агентство по образованию РФ
Белгородский государственный технологический университет им. В.Г. Шухова
Кафедра механического оборудования
Курсовой проект
по дисциплине: "Основы оптимального проектирования"
Тема: " Определение оптимального режима работы машины и указание рекомендуемый диапазон технологических и конструктивных параметров многоковшового роторного траншейного экскаватора"
Выполнил:
студент группы МС-38
Ампилогов И.В.
Проверил:
Булгаков С.Б.
Белгород 2010
Содержание
Введение
1. Конструкция, принцип действия оборудования и его назначение
2. Расчет основных деталей и узлов
3. Расчёт основных технико-экономических показателей
4. Тестовый пример расчёта мощности и производительности
5. Методы, применяемые для определения оптимального режима работы
5.1 Определение максимума значения функции с помощью метода "золотого сечения"
5.2 Определение минимума значения функции с помощью метода Фибоначчи
6. Выводы и рекомендации
7. Список литературы
8. Приложение
Введение
Целью курсовой работы является определение оптимального режима работы машины или агрегата. В соответствии с поставленной целью нужно решить следующие задачи:
- Осуществить расчёт деталей, узлов и технико-экономических показателей оборудования (производительность и мощность).
- Выделить основные параметры, влияющие на работу данного оборудования .
- Определить максимальное значение производительности и минимальное значение потребляемой мощности.
- Указать рекомендуемые режимы работы описываемого оборудования.
1. Конструкция, принцип действия оборудования и его назначение
Многоковшовый экскаватор — землеройная машина с рабочим органом в виде ковшовой цепи или ковшового колеса, которому сообщаются движения и усилия, достаточные для отделения от массива, захвата и переноса грунта.
Главная особенность этих машин заключается в непрерывности рабочего процесса. Он осуществляется при совмещении двух или трех одновременных и непрерывных рабочих движений (вращательного или поступательного движения рабочего органа относительно машины и поступательного движения самой машины)
Основное назначение этих экскаваторов в строительстве — отрывка траншей и щелей под трубопроводы и линии связи, производство гидротехнических и мелиоративных земляных работ.
Преимущества многоковшовых экскаваторов по сравнению с одноковшовыми заключаются в их более высокой удельной производительности и меньшей стоимости производства работ. В нашей стране ими выполняют до 20% общего объема земляных работ. Однако многоковшовые уступают одноковшовым экскаваторам при работе в тяжелых грунтах, особенно при разработке грунтов с каменными включениями.
Роторный экскаватор — самоходная выемочно-погрузочная машина непрерывного действия на гусеничном или шагающе-рельсовом ходовом оборудовании с выдвижной или невыдвижной стрелой, выбирающая горную породу ковшами, укреплёнными на роторном колесе.
Характеристики роторных экскаваторов
- диаметр роторных колёс — до 18м
- вместимость ковша — до 12500л
- производительность — более 10000м3/ч
- высота разработки — до 50м
- глубина копания — до 25м
Применение роторных экскаваторов
- вскрышные и добычные работы верхним или нижним черпанием
- удаления породы в отвал
- селективная выемка маломощных пластов и разносортных пропластков полезного ископаемого
- рытьё каналов и траншей
- погрузка горной породы
- транспортировка вскрышных пород и полезных ископаемых
- складирование материалов
Рабочие инструменты роторных экскаваторов
- ротор с приводом
- стрела ротора с конвейером
- кабина управления
- надстройка
- отвальная стрела с конвейером
- поворотная платформа с приводом поворота экскаватора
- опорно-поворотное устройства
- ходового оборудования
Классификация роторных экскаваторов
- вскрышные роторные экскаваторы
- добычные роторные экскаваторы
Роторный траншейный экскаватор — землеройная машина с рабочим органом в виде ковшового колеса (ротора), вращающегося в плоскости, совпадающей с направлением рабочего перемещения всей машины или незначительно отклоняющейся от нее. Грунт, отделяемый от массива и захватываемый ковшами, поднимается в зону разгрузки, которая находится в верхней части ротора, перемещается в сторону от траншеи и укладывается в отвал ленточным конвейером или метателем.

По сравнению с цепными роторные траншейные экскаваторы отличаются более высоким КПД (нет цепей, работающих в абразивной среде) и, следовательно, меньшей энергоемкостью разработки грунта. При равной с цепным экскаватором массе роторный экскаватор производительнее, поскольку допускает более высокую скорость резания, обусловленную равномерностью вращения ротора, жестким креплением ковшей и лучшими условиями их опорожнения. Однако роторным рабочим органом можно отрывать траншеи не уже 0,15...0,2 м, тогда как цепным ширина траншеи (щели) может быть доведена до 0,05 м. Пределы глубины отрываемых траншей роторными экскаваторами несколько меньше, чем цепными.
Глубина отрываемых траншей определяется диаметром ротора. Увеличение глубины копания связано со значительным возрастанием диаметра и массы ротора и поэтому рациональный предел глубины копания для ЭТР не превышает 3 м. Передача энергии от дизеля тягача к основным исполнительным механизмам (роторному колесу, отвальному конвейеру, гусеничному движителю) и вспомогательному оборудованию (механизмам подъема рабочего органа и конвейера) осуществляется с помощью механической, гидравлической или электромеханической трансмиссии.

В трансмиссию тягача включен гидромеханический ходоуменьшитель для бесступенчатого регулирования рабочих скоростей движения машины при копании траншей. На тягаче установлена дополнительная рама 2 с размещенными на ней механизмами привода 7и подъема-опускания рабочего органа. Рама имеет две наклонные направляющие 14, по которым с помощью пары гидроцилиндров 3 и двух пластинчатых цепей 4 гидравлического подъемного механизма перемещаются ползуны 15 переднего конца рамы 8 рабочего органа при переводе его из транспортного положения в рабочее и наоборот. Подъем-опускание задней части рабочего органа (рис. 1, б) осуществляются парой гидроцилиндров 5, штоки которых шарнирно прикреплены к верхней части стоек 16, связанных с задним концом рамы 8 цепями 6. При копании траншеи задняя часть рабочего органа находится в подвешенном состоянии Установка откидной части ленточного конвейера в наклонное рабочее положение и опускание ее при транспортировке машины производятся гидроцилиндром 19 через полиспаст 17 с траверсой 18. Изменением угла наклона откидной части конвейера достигается различная дальность отброса грунта в сторону от траншеи.
Привод ходового устройства экскаватора при движении на рабочих скоростях осуществляется от гидромеханического ходоуменьшителя, включающего насос 8 переменной производительности, гидромотор 12 и понижающий редуктор. Гидрообъемный привод ходоуменьшителя выполнен по схеме гидронасос - гидромотор. Вращение от гидромотора через понижающие передачи раздаточного редуктора 7 передается сначала на средний, а затем на нижний валы, коробки передач 2 тягача, далее через коническую передачу 20, бортовые фрикционы 3 и бортовые редукторы 4 на ведущие звездочки 21 гусеничного движителя.

Скорость рабочего хода в диапазоне 10...300 м/ч регулируется изменением производительности насоса 8. При передвижении машины на транспортных скоростях (1,5...6,2 км/ч) крутящий момент от дизеля 1 передается ведущим звездочкам 21 гусениц 5 через главную муфту сцепления, тракторную коробку передач 2, коническую пару 20, бортовые редукторы 4 и фрикционы 3. Привод ротора 74осуществляется от вала отбора мощности тягача через раздаточный редуктор 7, конический редуктор 10 с дифференциальным механизмом, цепные шарнирные передачи 11 и консольные одноступенчатые редукторы 12. От редуктора 12 движение передается полувалам привода ротора, на которых закреплены приводные шестерни 18, зацепляющиеся с зубчатым венцом 15 ротора.
В трансмиссию привода ротора включена предохранительная муфта 9 предельного момента.
Роторное колесо может вращаться с двумя скоростями (0,13 и 0,16 с-1) вперед и с одной скоростью назад. Пониженная частота вращения ротора необходима при разработке талых грунтов с крупными каменистыми включениями и мерзлых грунтов. Привод верхнего и нижнего барабанов отвального конвейера 13 обеспечивается индивидуальными гидромоторами 16, питающимися через гидрораспределитель от насоса 6. Для натяжения ленты конвейера барабаны снабжены винтовыми натяжными устройствами 17.
По ходовому оборудованию роторные траншейные экскаваторы делятся на пневмоколесные, гусеничные и колесно-гусеничные. Более распространены гусеничные машины, обладающие лучшей проходимостью.

По способу соединения рабочего органа с тягачом эти машины подразделяют на навесные и полуприцепные. Последние имеют дополнительную пневмоколесную тележку, позволяющую снизить нагрузку на тягач от рабочего органа.
Для отрывки узких траншей и прорезания щелей в мерзлых грунтах вместо ковшового ротора применяют фрезерный. Для рытья траншей и каналов с откосами экскаватор оснащают дополнительными шнеками-фрезами и профилирующими ножами. Для этих же целей применяют экскаваторы с двумя наклонными роторами преимущественно фрезерного типа.
Конструктивной разновидностью роторных траншейных экскаваторов являются машины с переставным ротором. Возможность перестановок ротора позволяет отрывать траншеи у стен зданий, заборов, столбов и в других стесненных условиях.
Конструкции
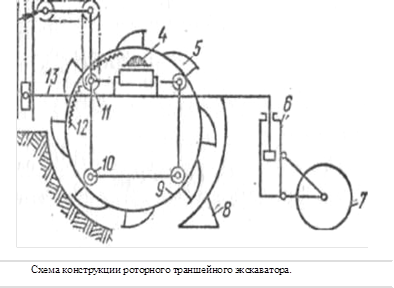
Роторный траншейный экскаватор состоит из рабочего органа, тележки, отвального конвейера, или метателя, двигателя, механизмов управления, передаточных и подъемных механизмов, платформы и поддерживающих металлоконструкций.
Ковши 5 рабочего органа присоединены к колесу 9, расположенному внутри рамы 13. Вращательное движение колесу сообщается при помощи внутреннего зубчатого венца 12 и шестерни 11. Для фиксации вертикального положения ковшового колеса служат ролики 10. Внутри ковшового колеса, под прямым углом к плоскости его вращения, находится отвальный конвейер, или метатель, 4, опирающийся на раму. На отвальный конвейер грунт попадает под действием силы тяжести.
Рама ковшового колеса задним по ходу экскаватора концом с помощью колес 7 и подъемного гидроцилиндра 6 опирается о дно траншеи. Передний конец рамы соединен с гидроцилиндром 2 подъемного механизма. К раме ковшового колеса прикреплен зачистной башмак 8. На тележке экскаватора 15 находится платформа 14, на которой уставлены двигатель Д, механизмы системы управления У, гидропривод /. передаточные механизмы /, //, /// и рама 3, поддерживающая механизмы и конструкции экскаватора.
Ковши применяют, как правило, саморазгружающиеся, отрытые спереди и сверху. Болтами через проушины в боковых стенках они жестко прикрепляются к колесу.
Конструкции корпуса и козырька ковша роторного экскаватора аналогичны конструкциям цепного многоковшового траншеекопателя. Выпуклое очертание корпуса способствует лучшему заполнению и опорожнению ковша и, кроме того, повышает устойчивость ротора в забое.
Замена большого числа зубьев на роторе после их износа требует значительных затрат времени. Поэтому конструкцией зубьев должна предусматриваться возможно малая трудоемкость их установки или снятия. Для сокращения затрат времени на эти операции целесообразно применять двухсторонние зубья. Для отрывки узких щелей зубья крепятся непосредственно к дисковому ротору — фрезе.

Ковш роторного траншейного экскаватора:
а - крепление ковша на обечайке; б — режущая часть; 1 — зуб; 2 — козырек; 3 - обечайка; 4 — цепное днище; 5 — карман крепления зуба; 6 — зуб-уширитель.
Ширину траншеи можно изменять при смене ротора или установке зубьев-уширителей.
Колесо ротора состоит из двух колец, соединенных ковшами и образующих с ними жесткую конструкцию. На торцах колец укреплен зубчатый венец для сообщения ротору вращения. При двухрядном расположении ковшей посредине между двумя кольцами, несущими зубчатые венцы, устанавливается третье кольцо. Внутренняя поверхность зубчатого венца обычно является также беговой дорожкой для поддерживающих и направляющих роликов.
Ротор для отрывки узких траншей или прорезания щелей представляет собой сварной диск коробчатого сечения с зубодержателями. Благодаря последовательному боковому смещению зубодержателя и зубьев обеспечивается отрывка траншеи расчетной ширины. Зубчатые венцы ротора помещаются на обоих его торцах. Для очистки ротора от грунта и перемещения грунта на бермы траншеи служат специальные очистители и отвалообразователи.
Рама ротора — пространственная металлическая конструкция для удержания ротора в необходимом рабочем или транспортном положении. Она служит также опорой для отвального конвейера, механизма привода ротора и электродвигателя этого механизма у многодвигательных машин.
Передним по ходу экскаватора концом рама ротора соединяется с подъемным механизмом. Задний конец рамы поддерживается колесной опорой 7 (рис. 124), перекатывающейся по дну траншеи, или подвеской (в экскаваторах с навесным ротором).
Механизмы подъема имеют в большинстве случаев гидравлический привод. По конструктивному исполнению различают гидравлические, гидроканатные и гидроцепные разновидности механизмов. В гидроканатных и гидроцепных механизмах ротор опускается и поднимается гидравлическими цилиндрами, включенными в систему полиспастов.
Грунт может перемещаться по обе стороны от экскаватора, если предусмотрена возможность перестановки конвейера и перемены направления движения его ленты. Конвейер переставляется обычно вручную с помощью реек или цевочного зацепления, в крупных экскаваторах — гидроцилиндром или специальным механическим приводом, управляемым с пульта машиниста.

Схемы механизма подъема ротора:
а — с подвеской заднего конца рамы; б — с раздельным подъемом переднего и заднего концов рамы ротора; 1 — рама ротора; 2, 4 — звездочки; 3 — цепь; 5 — гидроцилиндр.
Некоторые модели экскаватора оборудованы складными конвейерами, а самые крупные — двумя конвейерами, что позволяет выдавать грунт одновременно по обе стороны от траншеи.
В экскаваторах с механической трансмиссией конвейеры имеют обычно привод на оба концевых барабана с натяжным устройством.
Ленты конвейеров снабжены бортами. Для предотвращения сбега с барабана ленты применяются с направляющим ребром.
Продольный профиль конвейеров может быть прямолинейным, дугообразным и ломаным (V-образным). Наиболее распространены дугообразные конвейеры в которых благодаря действию центробежных сил грунт прижимается к ленте и быстро приобретает ее скорость.
Для придания криволинейного профиля в направлении продольной оси конвейера ленту прижимают сверху к концевым барабанам и промежуточным роликовым опорам резинотканевыми ремнями, которые одновременно служат элементами направляющих бортов для грунта.

Ходовое оборудование большинства моделей роторных траншейных экскаваторов гусеничное. Более рационален передний привод гусениц: двигатель и трансмиссия тележки располагаются впереди, а свободное место сзади тягача позволяет приблизить рабочий орган к центру тяжести всей машины. Рама экскаватора опирается на гусеничную тележку в трех точках: на две точки сзади и одну (балансир) — спереди.
Зачистной башмак служит для выравнивания дна траншеи. Он помещается на конце наклонной или криволинейной балки, находящейся в вертикальной осевой плоскости перемещения экскаватора и прикрепленной к задней по ходу экскаватора части рамы ротора и задней опоре. Грунт, перенесенный ротором через его верхнюю часть, подгребается зачистным башмаком под ротор.
2. Расчет основных деталей и узлов
Для предварительного определения массы машин служит ГОСТ 19618-74 и типаж на эти машины. Ориентировочные массы отдельных узлов экскаватора определяются по соответствующим показателям машин-аналогов с учетом правил масштабности конструкций, установленных по теории подобия.
Для определения общих размеров машины и ориентировочных размеров ее узлов служат эмпирические формулы.

Dp = 1,75 * 1.8 = 3.15
bk = 0.9 * 0.7 = 0.63
hk = 0.5 * 0.7 = 0.35
Tk = 3.14 * 3.15 / 0.35 = 28.26
lk = 0.4 * 28.26 = 11.3
3. Расчет технико-экономических показателей машины
Производительность:
Эксплуатационная производительность роторных траншейных экскаваторов по выносной способности, м3 /ч,
Q= 3600 nmqkн kв /kр ,
где n - частота вращения ротора, с-1 ; m - число ковшей; q - вместимость ковша, м3 ; kв - коэффициент использования машины по времени (0,7...0,85); kн - коэффициент наполнения (0,9... 1,1); kр - коэффициент разрыхления грунта (1,1…1,4).
Мощность:
Мощность, расходуемая на копание грунта, кВт,
Р= RК *Q/3600,
где Rк - удельное сопротивление копанию (кПа), зависящее от категории разрабатываемого грунта; для грунтов I категории Rк ~ 100 кПА, II категории Rк ~ 200 кПА, III - Rк ~ 300 кПА, IV - Rк ~ 400 кПа.
Глубина отрываемой траншеи :
![]()
Rp – радиус ротора до режущих кромок;
Ho.p – разница уровней платформы экскаватора и оси вращения ротора;
4. Тестовый расчет
Производительность:
Q = (3600* n * m * qz * kv * kn )/ kp = (3600*0.13*14*0.16*0.7*0.9)/1.1 = 600 m 3/ч
Мощность необходимая для рытья траншеи:
P = ( Rk * Q )/3600 = (100*600)/3600 = 16.6 кВ m
5. Методы, применяемые для определения оптимального режима работы
5.1 Нахождение max значения производительности с помощью метода Фибоначчи
Предположим, что нужно определить минимум как можно точнее, т. е. с наименьшим возможным интервалом неопределенности, но при этом можно выполнить только n вычислений функции. Как следует выбрать n точек, в которых вычисляется функция? С первого взгляда кажется ясным, что не следует искать решение для всех точек, получаемых в результате эксперимента. Напротив, надо попытаться сделать так, чтобы значения функции, полученные в предыдущих экспериментах, определяли положение последующих точек. Действительно, зная значения функции, мы тем самым имеем информацию о самой функции и положении ее минимума и используем эту информацию в дальнейшем поиске.
Предположим, что имеется интервал неопределенности ( x 1 , x 3 ) и известно значение функции f (х2 ) внутри этого интервала (см. рис. 5.1). Если можно вычислить функцию всего один раз в точке х*, то где следует поместить точку х4 , для того чтобы получить наименьший возможный интервал неопределенности?
Положим x 2 -x 1 = L и х3 - x 2 = R , причем L > R , и эти значения будут фиксированы, если известны x 1 , x 2 , x 3 . Если x 4 находится в интервале (x 1 ; x 2 ) , то:
1) если f (х4 ) < f ( x 2 ) , то новым интервалом неопределенности будет (x 1 ; x 2 ) длинойx 2 -x 1 = L ;
2) если f (х4 ) > f (х2 ) , то новым интервалом неопределенности будет (x 4 ; x 3 ) длиной х3 - x 4 .

Поскольку не известно, какая из этих ситуаций будет иметь место, выберем x 4 таким образом, чтобы минимизировать наибольшую из длин х3 - х4 и х2 - x 1 . Достигнуть этого можно, сделав длины х3 - x4 и х2 - x 1 равными, т. е. поместив х4 внутри интервала симметрично относительно точки х2 , уже лежащей внутри интервала. Любое другое положение точки x 4 может привести к тому, что полученный интервал будет больше L . Помещая х4 симметрично относительно х2 , мы ничем не рискуем в любом случае.
Если окажется, что можно выполнить еще одно вычисление функции, то следует применить описанную процедуру к интервалу (х1, х2 ), в котором есть значение функции, вычисленное в точке x 4 , или к интервалу (x 4 ; x 3 ) , в котором уже есть значение функции, вычисленное в точке х2 . Следовательно, стратегия ясна с самого начала. Нужно поместить следующую точку внутри интервала неопределенности симметрично относительно уже находящейся там точке. Парадоксально, но, чтобы понять, как следует начинать вычисления, необходимо разобраться в том, как его следует кончать.
На n-м вычислении (рис. 5.2) n-ю точку следует поместить симметрично по отношению к (n-1)-й точке. Положение этой последней точки в принципе зависит от нас. Для того чтобы получить наибольшее уменьшение интервала на данном этапе, следует разделить пополам предыдущий интервал. Тогда точка х n , будет совпадать с точкой хп-1 . Однако при этом мы не получаем никакой новой информации. Обычно точки хп-1 и хп отстоят друг от друга на достаточном расстоянии, чтобы определить, в какой половине, левой или правой, находится интервал неопределенности. Они помещаются на расстоянии є /2 по обе стороны от середины отрезка L п-1 ; можно самим задать величину є или выбрать эту величину равной минимально возможному расстоянию между двумя точками. (Предположим, что в нашем примере инженер может регулировать температуру с интервалом в 1°С, поэтому є = 1.)
Интервал неопределенности будет иметь длину Ln , следовательно, L п-1 = 2 Ln – є (рис. 11, нижняя часть).
На предыдущем этапе точки хп-1 и хп-2 должны быть помещены симметрично внутри интервала L п-2 на расстоянии L п-1 от концов этого интервала. Следовательно,
L п-2 = L п-1 + L п (рис. 5.2, средняя часть).
Из рисунка ясно, что на предпоследнем этапе хп-2 остается в качестве внутренней точки.
Аналогично L п-3 = L п-2 + L п-1 (рис. 5.2, верхняя часть)
В общем случае
Lj -1 = Lj + Lj +1 при 1 < j < n.
Таким образом,
L п-1 =2 L п – ε ,
L п-2 = L п-1+ L п =3 L п – ε ,
L п-3 =L п-2+ L п-1 =5 L п – ε ,
L п-4 = L п-3+ L п-2 =8 L п – ε и т. д.
Если определить последовательность чисел Фибоначчи следующим образом:
F 0 = 1, F 1 = 1 и Fk =Fk -1 + Fk -2 для k = 2,3, … , то
Ln - j =Fj +1 . Ln – Fj -1 . ε, j = 1,2, … , n -1
Если начальный интервал (а, b ) имеет длину L 1 (= b - а), то
L 1 = Fn . Ln – ε . Fn -2 ,
т.е. ![]()
Следовательно, произведя n вычислений функции, мы уменьшим начальный интервал неопределенности в 1/Fn раз по сравнению с его начальной длиной (пренебрегая ε) , и это — наилучший результат.
Если поиск начат, то его несложно продолжить, используя описанное выше правило симметрии. Следовательно, необходимо найти положение первой точки, которая помещается на расстоянии L 2 от одного из концов начального интервала, причем не важно, от какого конца, поскольку вторая точка помещается согласно правилу симметрии на расстоянии L 2 от второго конца интервала:
![]()
После того как найдено положение первой точки, числа Фибоначчи больше не нужны. Используемое значение е может определяться из практических соображений. Оно должно быть меньше L 1 / Fn +1 , в противном случае мы будем напрасно тратить время на вычисление функции. Таким образом, поиск методом Фибоначчи, названный так ввиду появления при поиске чисел Фибоначчи, является итерационной процедурой. В провесе поиска интервала (х1 , х2 ) с точкой х2 , уже лежащей в этом интервале, следующая точка x 4 всегда выбирается такой, что х3 - x 4 = x 2 - x 1 или х4 - х1 =х3 - х2 , т. е. х4 =x 1 - х2 + х3 .
Если f(х2 ) > f(х4 ) и f(х4 ) < f(х2 ), то можно рассмотреть четыре случая, нахождения max функции методом Фибоначчи.

Рисунок 5.3. Четыре варианта расположения точек в интервале поиска max функции методом Фибоначчи
5.2 Определение min значения мощности методом золотого сечения
Не всегда можно заранее определить, сколько раз придется вычислять функцию. В методе Фибоначчи это нужно знать для определения L 2 , т. е.положения начальной точки.
Метод "золотого сечения" почти столь же эффективен, как и метод Фибоначчи, однако при этом не требуется знать п — количество вычислений функции, определяемое вначале. После того как выполнено j вычислений, исходя из тех же соображений, что и ранее, записываем
Lj -1 = Lj + Lj +1 .
Однако если п не известно, то мы не можем использовать условие Ln -1 = = 2 Ln - ε. Если отношение последующих интервалов будет постоянным, т.е.

![]()
т. е. т = 1 + 1/τ.
Таким образом, τ 2
- τ -1 = 0, откуда ![]() . Тогда
. Тогда
![]() и т. д.
и т. д.
Следовательно,
![]() т.е
т.е![]()

Рисунок 5.4 Поиск экстремума функции методом золотого сечения
В результате анализа двух рассмотренных значений функции будет определен тот интервал, который должен исследоваться в дальнейшем. Этот интервал будет содержать одну из предыдущих точек и следующую точку, помещаемую симметрично ей. Первая точка находится на расстоянии L
1
/τ
от одного конца интервала, вторая — на таком же расстоянии от другого. Поскольку ![]() , то видно, чтопоиск методом "золотого сечения" является предельной формой поиска методом Фибоначчи. Название "золотое сечение" произошло от названия отношения в уравнении. Видно, что Lj
-1
делится на две части так, что отношение целого к большей части равно отношению большей части к меньшей, т. е. равно так называемому "золотому отношению".
, то видно, чтопоиск методом "золотого сечения" является предельной формой поиска методом Фибоначчи. Название "золотое сечение" произошло от названия отношения в уравнении. Видно, что Lj
-1
делится на две части так, что отношение целого к большей части равно отношению большей части к меньшей, т. е. равно так называемому "золотому отношению".

Рисунок 5.5. Четыре варианта расположения точек в интервале поиска min функции методом золотого сечения
6. Выводы и рекомендации
В процессе расчета оптимальных технико-экономических показателей работы многоковшового роторного траншейного экскаватора был проанализирован характер изменения его от частоты вращения вала n. По мнению наблюдателя определились следующие оптимальные значения технико-экономических показателей при n=0.145:
Qопт=780 м3/ч;
Pопт=21.22 кВт.

Зависимость графика Q ( n ) строго линейная, что позволяет увеличивать частоту вращения вплоть до значения, при котором производительность максимальна (указана в технической характеристике). Производительность может быть ограничена только потребляемой машиной мощностью изменяющейся в зависимости от частоты вращения и категории грунта.
График зависимости производительности Q и мощности Р от частоты вращения n.
7. Список литературы
1. конспект лекций
2. http://www.baurum.ru/_library/?cat=power_shovels&id=1209
3.Машины для земляных работ. Под общ. ред. чл.-кор. АН УССР проф. Ю. А. В е т р о в а. — 2-е изд., дораб. и доп. — Киев: Вища школа. Головное изд-во, 1981.— 384 с.
4.http://ru.wikipedia.org/wiki/Роторный_экскаватор
5.http://ru.wikipedia.org/wiki/Метод_золотого_сечения
Похожие рефераты:
Основные технологические процессы на разрезе "Томусинский"
Проект вскрытия и разработки Кадали-Макитской террасы
Земляные работы в строительстве
Технология строительного производства
Одноковшовые экскаваторы. Башенные краны. Погрузочно-разгрузочные машины
Проектирование рабочего оборудования одноковшового экскаватора
Восстановление гидросистемы "Польского сада" усадьбы Г.Р. Державина