| Похожие рефераты | Скачать .docx |
Дипломная работа: Опис та удосконалення маршруту потрапляння зерна до Зерносушарки ДСП-32 на Заводі елеваторного обладнання для ВАТ "Відродженння"
Вступ
Моєю темою дипломного проекта є опис та удосконалення маршруту потрапляння зерна до Зерносушарки ДСП-32 на Заводі елеваторного обладнання для ВАТ «Відродженння». В моєму проекті буде описана характеристика об'єкту автоматизації, короткий опис технологічного процесу маршруту руху зерна, попадання його в зерносушарку ДСП-32, його сушка і охолоджування і подальший шлях на безтарне зберігання. Опис типу технологічного устаткування використовуваний в технологічному маршруті моєї теми, його основні характеристики, опис вимоги технологій до автоматизації об'єкту, а також охорона праці на підприємстві та в зерносушарках.
1. Характеристика об'єкту автоматизації
Сучасні елеваторні підприємства, як об'єкт автоматизації представляють собою складне підприємство з великим обсягом технологічного устаткування.
Технологічний процес на елеваторному підприємстві можна підрозділити на наступні основні операції:
· Прийом і зберігання зерна;
· Очищення його від домішок і так далі.
Рівень автоматизації будь-якої ділянки залежить від складності технологічного процесу.
Темою дипломного проекту є розробка і опис автоматизації надходження зерна з автомобільного транспорту в зерносушарку ДСП-32 і подальший його шлях до бункера підлогового зберігання зерна.
Машини, що діють, на зерносушарці ДСП-32 для транспортування зерна і продуктів його переробки від низу до верху застосовують ковшеві норії; для горизонтального і похилого переміщення – стрічкові конвеєри; як гравітаційний транспорт використовують перекидні клапани (для насипних грузів).
Головною метою дипломного проекту є опис автоматизації маршруту прийому зерна з автотранспорту з наступним очищенням і надходження його до зерносушарки ДСП-32.
1.1 Короткий опис технологічного процесу
Технологічний процес харчового виготовлення ділиться до головних фізичних, хімічних і фізико-хімічних законів.
Зерно поступає з автомобільного транспорту в бункер (Б-1) і через засувку потрапляє на стрічковий конвеєр (КС-1). З конвеєра, поступає на норію (Н1), піднявшись з норії поступає на перекидний клапан (ПК-1), де розділяється і висипається у верхній оперативний бункер (Б-2). З бункера через засувку зерно поступає на стрічковий конвеєр (КС-2), а далі поступає на норію (Н2). Зерно піднявшись по норії поступає в сушарку зерна (СЗ1), де відбувається сушка зерна топковими газами. У зерносушарці зерно проходить три зони в яких визначається температура і вологість зерна. Після просушування зерно вивантажується з двох патрубків на стрічковий конвеєр (КС-3), який доставляє зерно до перекидного клапана (ПК-2). Далі частина зерна вертається на норію (Н2), і піднімається досушиваться в зерносушарку. А інша частина поступає в норію (Н3), звідки висипається на перекидний клапан (ПК-3) – одна частина доставляється на автотранспорт, а інша частина в надвесовой бункер для підлогового зберігання зерна (Б-3).
1.2 Опис типа технологічного обладнання і його основних характеристик
В моєму технологічному маршруті дипломного проекту автоматизації зерносушарки ДСП-32 на Заводі елеваторного обладнання для ВАТ «Відродження», використовується таке технологічне устаткування як норії (Н1, Н2, Н3), стрічкові конвеєри (КС1, КС2, КС3), зерносушарка ДСП-32 (СЗ1), перекидні клапани (ПК1, ПК2, ПК3), топка. Опис та розгляд яких піде далі.
Норія
Стрічкові норії призначені для транспортування сипких вантажів по вертикалі від низу до верху. Тяговим органом норії служить гумовотканинна плоска стрічка (ремінь), а робочим – ковши.
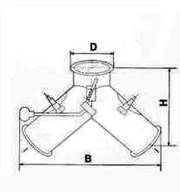
Схема пристрою норії:
1 – приводний барабан; 2 – розвантажувальний патрубок; 3 – стрічка; 4 – ківш; 5 – труби; 6 – натяжний барабан; 7, 8 – приємні патрубки.
Норія має два барабани: верхній приводний 1 і нижній натяжний 6. На барабани натягається нескінченна стрічка 3, на якій болтами закріплюють ковши 4. Цей барабан приводиться в рух електродвигуном, як правило через редуктор. Завдяки тертю між приводним барабаном і стрічкою вона приходить в рух, а з нею переміщуються ковши з продуктом. Нижній барабан також обертається із-за тертя між стрічкою і цим барабаном. Силу тертя регулюють шляхом натягнення стрічки спеціальним пристроєм (вантажним або гвинтовим).
У приймальні патрубки 7 або 8 завантажують продукт, що підлягає переміщенню, ковшами він піднімається вгору, де під дією сили тяжіння і відцентрової сили висипається через розвантажувальний патрубок 2 норії в самотечную трубу.
Безпосереднє транспортування проводиться норійнимі ковшами (корцамі), закріпленими на безперервній норійній стрічці, що проходить по норійним трубам.
Під час вступу продукту через приймальний патрубок 7 ковші тільки зачерпують його. Якщо продукт подається через приймальний патрубок 8, то окрім зачерпування, відбувається досипання ковшів продуктом, що збільшує коефіцієнт його заповнення. Тому патрубок 8 розміщений декілька вище за патрубок 7. При установці норії прагнуть подавати продукт через патрубок 8, а якщо це неможливо, продукт направляють на патрубок 7.
Верхню частину норії називають головкою, а нижню – черевиком. Головка і черевик сполучені вертикальними трубами 5, в яких рухається стрічка з ковшами.
Норійний ківш (4).
Характеристика норії
· За призначенням – зернові, мучні, кукурудзяні;
· По характеру завантаження ковшів – з відцентровим завантаженням типу Нц-i (v=2.2/3.6 м/сек) і типу Нц-ii (v=3/9/4 м/сек), і відцентрово-гравітаційні (НЦГ);
· За типом конструкції – одинарні і подвійні;
· За типом тягового органу – стрічкові, ланцюгові.
· Норія типу Нц-i застосовують для транспортування зерна вологістю понад 17%, Нц-ii для зерна вологістю до 17%.
При роботі на неодруженому ходу стежать за тим, щоб стрічка норії не збігала з барабанів і відвідного ролика, а також за нагрівом підшипників і редуктора (їх температура не повинна перевищувати 60 °С). Ущільнення підшипників гальма і – редуктора не повинні пропускати мастило. Після обкатки перевіряють кріплення ковшів на стрічці і підтягають ті, що ослабіли.
Норію стрічкову під навантаження включають на 4 ч, перевіряючи відповідність фактичній продуктивності проектною, роботу редуктора, дію гальма, чи не збігає стрічка з барабанів. Перед пуском відкривають засувку приймального патрубка і обережно, поступово збільшуючи висип зерна, завантажують норію. Це дозволить запобігти завалу черевика норії. Щоб не допустити перевантаження, встановлюють обмежувач, вище за яке засувка не піднімається. Крім того, на засувку наносять відмітки, вказуючі величину продуктивності норії.
Під час роботи стежать, щоб: зерно поступало в черевик рівномірно, в достатній кількості і не перенавантажувало його; ковші не зачіпали за стінки головки, черевика і труб норії; не перегрівалися підшипники; справно працювала аспірація.
Датчик контролю швидкості серії ДКС призначений в першу чергу для контролю зупинки або зниження швидкості обертання (рухи) різних пристроїв, таких, як конвеєри, норії, барабани, і застосовується на всіх норія і конвеєрах технологічного процесу. Може застосовуватися для виявлення аварійного прослизання стрічки на транспортері.
Датчиком контролю швидкості є індуктивний датчик з схемою контролю частоти імпульсів дії і бінарним виходом. Контрольований об'єкт, що обертається, безпосередньо або за допомогою сполученого з ним металевого об'єкту впливає на чутливий елемент датчика з частотою пропорційній частоті обертання. При нормальній частоті обертання на виході датчика швидкості і на навантаженні є напруга. Необхідне значення контрольованої мінімальної частоти встановлюється за допомогою потенціометра.
Зручніше проводити настройку і перевірку працездатності датчика контролю швидкості з використанням тест-блока ПВ-ПС-100 або ПВ-ПС-200.
Для контролю верхнього рівня сипких матеріалів в бункерах і силосах поставляється модифікація датчика Tse-04du з можливістю дистанційного регулювання зони спрацьовування. Датчики Tse-04du поміщені в захисний сталевий стакан, укріплений на штанзі завдовжки до 2 м. Штанга з датчиком кріпиться до верхньої поверхні бункера або силосу за допомогою монтажного куточка. Датчик Tse-04du комплектується вторинним приладом, за допомогою якого можна контролювати і регулювати момент спрацьовування чутливого елементу і затримку спрацьовування вихідного реле.
Датчик підпору.
Сигналізатор доплеровський ДС-2–2 призначений для контролю збігання стрічки з приводного або натяжного барабанів одиночної або здвоєної норії, встановлений на норіях Н1, Н2, Н3 в дипломному проекті. На норіях з металевими ковшами сигналізатор також виконує функцію датчика підпору вихідної гілки. ДС-2–2 (далі іменований «датчик») може використовуватися для контролю відстані до інших рухомих промислових установок.
Широко використовуються для переміщення зерна і продуктів його переробки в горизонтальному і похилому напрямах. Залежно від призначення і місця установки застосовують різноманітні схеми стрічкових ланцюгових конвеєрів. Вони відрізняються тим, що продукція завантажується зерном в будь-якому місці конвеєра, а відвантажується тільки в одному місці.
Стрічковий конвеєр. Призначений для переміщення в горизонтальній площині або з нахилом штучних вантажів. Розрізняють транспортер загального призначення і спеціальний. До останніх відносяться транспортери з просторовою трасою, розливні машини для металу, пасажирські ескалатори, лінії розливу і упаковки, транспортери і конвеєри для суші барів.
Транспортер складається із стрічки 4, на якій поміщається продукт, з приводного 9 і натяжного барабана 1. Стрічкові конвеєри бувають: надсилоснимі і підсилосними.
Засувки служать для подачі і припинення надходження продукту на механізми з силосу (бункеру). На автоматичній ділянці застосовують електрифіковані засувки з виконавчими механізмами. У шиберной засувці відсутня зубчата передача, а впливає на шибер робочий орган приводу. Засувка з приводом дозволяє дистанційно встановлювати будь-який ступінь відкриття або закриття шибера. Це забезпечується введенням реостати зворотного зв'язку, встановлюваного в самому Ім . Відкривають і закривають засувки за допомогою штурвалу, поставленого комплексно з електроприводом.
У стрічкових конвеєрах продукт безперервно падає на стрічку 4 через завантажувальний пристрій 2. Стрічка отримує рух від приводного барабана 9. Продукт, що знаходиться на стрічці, скидається в будь-якому місці конвеєра за допомогою розвантажувального пристрою 6. Для натягнення стрічки використовують барабан 1. Неробоча гілка стрічки рухається по прямих роликових опарах 7. Щоб збільшити кут обхвату стрічки приводного барабана, на конвеєрі встановлюють відвідний барабан 8. Всі вузли конвеєра вмонтовуються на залізобетонній або металевій станині 3.
Кінцевий вимикач ВП-16 призначений для реєстрації електропровідних і не електропровідних матеріалів, що знаходяться в твердому, порошкоподібному або рідкому стані.
Принцип роботи заснований на зміні ємкості коливального контура генератора при наближенні об'єкту до активної поверхні вимикача. Ця зміна перетвориться спеціальною схемою, в сигнал, що управляє, на комутацію навантаження.
Вимикачі розраховані на тривалу безперервну роботу. Вимикачі мають захист від короткого замикання в навантаженні, від подачі напруги живлення зворотної полярності, від ЕДС самоіндукції індуктивного навантаження.
Вимикачі мають світлодіодні індикатори для оперативного контролю комутаційного стану і працездатності, а також регулятор для корекції чутливості.
Стаціонарна зерносушарка ДСП-32 відкритого типу з продуктивністю 32 т/г призначена для зниження вологості зерна до величини, що забезпечує тривале зберігання зерна. Застосовують на підприємствах зерноочищення і встановлюють на потокових лініях прийому, очищення і відвантаження зерна, а також біля елеваторів і складів. Відноситься до зерносушарок шахтного типу, тобто сушка зерна, що розсипається через секції, відбувається завдяки подачі потоків гарячого повітря через короби секцій. Зерносушарка найбільш поширена в Україні завдяки компактності, надійності, низькій вартості, можливості сушки всіх зернових культур.
Зерносушарка є установкою відкритого типу з двухступенчатим режимом сушки і складається з двох паралельно працюючих сушильних шахт із збірних металевих конструкцій. Кожна шахта має 7 секцій, і по висоті розділяється на 3 зони. Перша зона (сушки) розташована у верхній частині шахти, друга зона – в середній, а третя (охолоджування) – в нижній частині шахти. Агент сушки в камеру нагріву нагнітається двома вентиляторами (В4, В5), для 1 зони і для другої зони. Для захисту шахт від попадання атмосферних опадів над відкритими торцями відвідних коробів встановлюються запобіжні козирки, виготовлені з оцинкованої сталі. Під охолоджувальними камерами встановлені затвори періодичної дії і підсушильний бункер, з якого зерно попадає на конвеєр (Н3), і далі на перекидний клапан (ПК2), норію (Н3). Піднявшись висипається в перекидний клапан (ПК3), а звідти одна частина зерна на автотранспорт безтарного перевезення, а інша в бункер безтарного зберігання зерна (Б3).
Зерносушарка ДСП-32 встановлюється в окремо розміщених будовах, яке пов'язане з баштами елеваторів.
Короби, що підводять і відвідні, розташовані горизонтальними рядами через один в шаховому порядку. Напівкороби розміщені в рядах коробів, подводящих агент сушки в шахту. Тому зерно, рухоме біля залізобетонних стінок шахти сповільнено, може перегріватися, знаходячись під гарячими напівкоробами.
У шахтах зерносушарки встановлені затвори під сушильною і охолоджувальними камерами. Затвор, що знаходиться під сушильною камерою, відкривається і закривається штурвалом вручну. Цей затвор закривають перед заповненням сушарки сирим зерном щоб уникнути попадання його в охолоджувальну камеру. Після просушування зерна затвор відкривають і зерно пересипається в охолоджувальну камеру. В процесі сушки цей затвор залишається весь час відкритим для проходу зерна з сушильної камери в охолоджувальну.
Нижній затвор служить для періодичного випуску просушеного і охолодженого зерна. Цей затвор періодично відкривається тягою від редуктора. Над затворами влаштовані люки для ремонту і очищення затворів після звільнення шахти від зерна.
У розподільних камерах зерносушарки встановлені горизонтальні залізобетонні перегородки, одна з яких розташована на висоті між першою і другою зоною сушки, а друга – на висоті охолоджувальної камери.
Призначення верхньої перегородки – не допустити змішування між собою двох потоків агента сушки, що подається в першу і другу зони сушки з різними температурами. Нижня перегородка перешкоджає змішуванню агента сушки з атмосферним повітрям. У першу зону агент сушки подає вентилятор (В4) середнього тиску через отвір, другу – вентилятор (В5) через отвір. Атмосферне повітря для охолоджування зерна нагнітають в розподільну камеру вентилятором (В3) через отвір.
Відпрацьований агент сушки і повітря при виході з відвідних коробів поступають в загальну камеру з дверима, що щільно закриваються, звідки через жалюзійні отвори в стінці виходять назовні. У передньої стінки камери під дифузорами розташовані люки з кришками для доступу всередину камери.
В удосконалення входитиме ТРМ-138 к якому приэднуватимуться вісім датчиків вимірювання температури типу ТСП-100, многокональний блок живлення БЖ14, перетворювач интерфейсу БПІ-52 та ПК за допомогою якого можна будеуправляти регулятором ТРП-138 в робочому приміщенні яке знаходиться в топці.
Вимірник-регулятор ОВЕН ТРМ-138 призначений для вимірювання, реєстрації і регулювання температури, тиску або іншого фізичного параметра, одночасного управління декількома (до 8-ми) виконавчими механізмами, а також для реєстрації зміряних параметрів на ЕОМ. Прилад випускається в щитовому корпусі типу Щ4.
Функціональні можливості регулятора ОВЕН ТРМ-138:
1. Вісім універсальних входів для підключення від 1 до 8 датчиків різного типу в будь-яких комбінаціях, що дозволяє одночасно вимірювати і контролювати декілька різних фізичних величин (температуру, вологість, тиск і ін.)
2. Обчислення додаткових величин:
– середніх значень від 2 до 8 зміряних величин;
– різниць зміряних величин;
– швидкості зміни вимірюваної величини
3. До восьми каналів регулювання або реєстрації температури, тиску або інших зміряних або обчислених величин:
– регулювання по двохпозиційному закону;
– реєстрація на аналоговому виході (струм 4…20 ма)
4. Від 1 до 8 вбудованих вихідних пристроїв різних типів у вибраній користувачем комбінації
5. Режим ручного управління вихідними пристроями
6. Конфігурація функціональної схеми і установка параметрів:
– кнопками на лицьовій панелі приладу;
– на ПК за допомогою програми-конфігурувати
7. Стандартна конфігурація – зручний вибір з чотирьох можливих
8. Вбудований інтерфейс Rs-485
ТРМ-138 включає наступні основні функціональні елементи:
· 8 універсальних входів;
· блоки цифрової фільтрації, корекції і масштабування для кожного вхідного сигналу;
· 8 логічних пристроїв (ЛУ);
· 8 вихідних пристроїв (ВУ);
· модуль інтерфейсу Rs-485.
Універсальні входи приладу ОВЕН ТРМ-138
До восьми універсальних входів ТРМ-138 можуть бути підключені датчики різного типу в будь-якій комбінації, що дозволяє одночасно вимірювати і контролювати декілька різних фізичних величин.
Логічні пристрої (ЛП)
Зміряні значення подаються на логічні пристрої (ЛП). ЛП можуть обробляти вхідні величини, обчислюючи різницю, середнє арифметичне значення або швидкість зміни вимірюваної величини.
На сьогоднішній день користувач може задати наступні режими роботи логічних пристроїв:
· двохпозиційний регулятор – ЛП порівнює зміряне значення і видає релейний сигнал, що управляє, відповідно до заданої логіки;
· реєстратор – ЛП видає аналоговий сигнал в діапазоні 4…20 мА, пропорційний значенню вимірюваного параметра.
Для роботи в режимі реєстратора для відповідного ЛП програмним шляхом повинен бути заданий цей режим і на виході встановлений ЦАП «параметр-струм 4…20 мА».
До кожного ЛУ може бути підключено один з восьми вихідних пристроїв, порядковий номер якого задається при програмуванні.
Вихідні пристрої (ВП)
У приладі залежно від замовлення можуть бути встановлені в різних комбінаціях наступні вихідні пристрої:
· реле 4 А 220 В;
· транзисторні оптопари n-p-n типу 200 мА 40 В;
· симісторні оптопари 50 мА 300 В (0,5 А в імпульсному режимі);
· логічний вихід 4…6 В 100 мА для управління твердотільним реле;
· ЦАП «параметр-струм 4…20 мА».
Інтерфейс зв'язку з ЕОМ
Прилад має вбудований двонаправлений інтерфейс Rs-485 для передачі даних і прийому інформації від комп'ютера і інших приладів, оснащених таким же інтерфейсним зв'язком.
Через цей інтерфейс прилад може передавати поточне значення зміряних величин і приймати команди на зміну уставок. Крім того, за допомогою спеціального програмного забезпечення ОВЕН може бути змінена конфігурація приладу.
В даний час створені і випускаються конфігурації приладу, аналогічні по своїх функціях приладам ОВЕН Укт38, Трм34 і Трм38. Крім того, створена нова конфігурація, що забезпечує контроль одного датчика і підтримку по двохпозиційному (вкл./выкл.) закону восьми незалежних уставок. Гнучка змінна структура приладу дозволяє в найкоротші терміни створювати будь-які конфігурації для вирішення широкого спектру завдань автоматизації.
Блок живлення БЖ-14
Багатоканальний блок живлення БЖ-14 призначений для живлення стабілізованою напругою 24 В або 36 В датчиків з уніфікованим вихідним струмовим сигналом.
Блок живлення БЖ-14 випускається в корпусі з кріпленням на DIN-рейку типу Д4.
Схема підключення

Основні функції
1) ПЕРЕТВОРЕННЯ ЗМІННОЇ (ПОСТІЙНОГО) НАПРУГИ в постійне стабілізоване в двох або чотирьох незалежних каналах;
2) ОБМЕЖЕННЯ ПУСКОВОГО СТРУМУ;
3) ЗАХИСТ ВІД ПЕРЕНАПРУЖЕННЯ І ІМПУЛЬСНИХ ПЕРЕШКОД на вході;
4) ЗАХИСТ ВІД ПЕРЕВАНТАЖЕННЯ, короткого замикання і перегріву;
5) ІНДИКАЦІЯ про наявність напруги на виході кожного каналу.
При вимірюванні температури об'єктів широко використовуються датчики температури – термометри опору і термоелектричні перетворювачі температури (термопари).
Ці типи датчиків самостійно не можуть вимірювати температуру об'єктів, а працюють для цих цілей тільки із спеціальною групою вимірювальних приладів.
Термометри опору типу ТСП-100– датчик для вимірювання температури конструктивно виконується намотуванням мідного або платинового дроту на ізоляційний каркас. Для захисту від механічних пошкоджень і зручності монтажу термометри опору укладають в захисну арматуру різних модифікацій.
Принцип дії таких датчиків заснований на зміні їх електричного опору від температури об'єкту. У загальному вигляді залежність має вид
Rt = R0 (1+at),
де Rt – опір датчика при його нагріванні на t°c; R0 – опір датчика при 0°с; а – температурний коефіцієнт.
Зміна електричного опору термометра опору – датчика із зміною теплового коливання кристалічної решітки металу: чим вище температура датчика, тим вище за коливання грат і ступінь рухливості вільних електронів, а отже, більше електричний опір.
Ремонт термометрів опору. До основних несправностей таких датчиків відносяться: замикання обмотки датчика на корпус, межвітковє замикання обмотки термометра опору, знижений опір ізоляції, обрив обмотки, пошкодження захисної гільзи.
Цілісність опору обмотки термометрів опору перевіряється за допомогою моста типу МО-62. Для перевірки градуювання датчика необхідно його помістити в термостат і при декількох температурах заміряти мостом МО-62 або МВУ-49 значення опору. Несправні датчики підлягають розбиранню і ремонту. Якщо датчик відвологий при використанні в сирих і вологих приміщеннях або низькій температурі вимірюваного середовища, необхідно його висушити в потоці сухого повітря в муфельній печі при температурі 50–70 °С або під напругою постійного струму 4 В, імітуючи режим вимірювання.
Нові типи датчиків системи ДСП (Державної системи приладів) практично не розбираються: дві або чотири послідовні спіралі з міді або платини поміщають в канальний керамічний каркас з подальшим набиванням вільного простору керамічним порошком тонкого помелу з сіллю баратов лужних металів.
Старі типи датчиків ремонтують при виникненні провисання і часткового замикання обмотки. Після вилучення обмотки датчика звільняють бандаж, розбирають пакет і за допомогою збільшувальної годинної лупи і пінцета волоски обмотки укладають на відповідні насічки, нанесені на каркасі.
Намотування мідних чутливих елементів виконують мідним дротом мазкі ПЕШО, ПЕС діаметром 0,1 мм відповідно до градуїровочних характеристик. Після виконання намотування електричний опір датчика при температурі 20°С повинно відповідати градуюванню «50 М» або «100 М».
Безпосередньо намотування проводиться на старий або знов виготовлений каркас рівномірним кроком по всій довжині; після кожного шару обмотки поверхня покривається бакелітовим або гліфталієвим лаком. Після завершення намотування заздалегідь проводиться вимір електричного опору обмотки при температурі 20°с за допомогою зразкового або лабораторного моста МО-62, МВУ-49.
Беcпроводниковий перетворювач інтерфейсів БПІ-52 призначений для організації обміну інформацією між видаленими пристроями (ПК, приладами і їх поєднаннями). Пристрій дозволяє передавати і приймати дані в напівдуплексному режимі. Оптимально підходить для роботи по протоколу ModbusRTU.
Доступні наступні інтерфейси електричних сигналів: USB (сумісність з USB 1.1 і USB 2.0), Rs-485/v. 11 (Eia-485) або Rs-232c (Eia-232c/v. 28, /v. 24).
Основні характеристики БПІ-52:
– Частотний діапазон 433 МГц.
– Кількість доступних каналів до 90.
– Потужність передавача до 10 мВт (дозвіл «Укрчастотнадзор» не потрібний).
– Дальність зв'язку до 200 м (пряма видимість) і до 50 м в закритому приміщенні.
– При підключенні до USB-интерфейсу, БПІ не вимагають додаткового зовнішнього джерела живлення.
Принцип роботи і пристрій блоку
Принцип роботи блоку полягає в гальванічному розділенні і перетворення сигналів інтерфейсу USB 2.0 в сигнали інтерфейсу Rs-485.
Блок складається з наступних основних частин:
· Пріємопередаючого вузла вхідного інтерфейсу;
· Пріємопередаючого вузла вихідного інтерфейсу;
· Вузла індикації напряму передачі даних;
· Вузла гальванічної розв'язки вхідних і вихідних інтерфейсів;
· Вузла живлення, забезпечуючого гальванічне розділення вихідних інтерфейсів.
Технічні характеристики інтерфейсу USB 2.0 для БПІ-52.
· Підтримка Plug and play;
· Підтримка гарячого підключення і відключення пристроїв до включеному комп'ютера;
· Світлодіодні індикатори: живлення, прийому і передачі даних;
· Швидкість каналу USB – до 12 М біт/с;
· Приймальний буфер 384 байт. Передаючий буфер 128 байт.
Режими управління інтерфейсом Rs-485
· Режим роботи – синхронний або з самосинхронізацією;
· Метод доступу – з передачею прав доступу;
· Режим управління прийомом-передачею:
1) З автоматичним дозволом по початку передачі і з цифровим фільтром на вході передавача, а також з автоматичним визначенням напряму передачі.
2) З дозволом по модемному сигналу RTS (по окремому замовленню).
За допомогою удосконалення зерносушарки ДСП-32 цією конструкцією в яку входить РС сумісний регулятор ОВЕН ТРП-138, підключення до нього вісім датчиків вимірювання температури типу ТСП-100, блоку живлення БП-14 підвищилася точність вимірювання температури в першій і другій зоні сушки зерна в зерносушарці ДСП-32.
Топка
Топка зерносушарки ДСП-32 працює на рідкому паливі. Подача палива здійснюється через форсунку з автоматичним регулюванням. Автоматика контролює процес горіння палива в топці, що забезпечують стабільний і економічний режим сушки зерна. Напорно-роздільне і облогові камери шахти поділені перегородками по висоті відповідно до розмірів сушильних і охолоджувальних зон.
Для сушки зерна використовують суміш топкових газів з повітрям такими, що утворюються при спалюванні в топці зерносушарці ДСП-32 того або іншого виду палива. В основному використовують дизельне паливо, солярне масло, тракторний гас і природний горючий газ. Вентилятори (В4, В5) направляють агента сушки в напорно-роздільні камери. Далі він через підводні короби підходить в сушильну шахту, пронизує зернову масу і через відвідні короби викидається в осадковій камері, а потім через жалюзійні вікна – в атмосферу.
Охолоджування зерна здійснюється аналогічно сушці, тільки місце агента сушки подається атмосферне повітря. Зерно подається в сушильну камеру зверху, і проходячи між коробами в зонах нагрівання, сушиться і нагрівається агентом сушки, а потім в зоні охолоджування продувається атмосферним повітрям. Механізм періодичної дії регулює випуск зерна з зерносушарки ДСП-32.
Клапан перекидний подвійний КДР

Основні характеристики клапанів:
Клапани перекидні КДР призначені для зміни напряму руху продукту по одному з двох можливих маршрутів. Дільник потоку призначений для розділення продукту, що поступає, на два потоки шляхом проміжної установки і фіксації люка дільника в корпусі гвинтовим стопорним пристроєм.
1.3 Вимога технології до автоматизації об'єкту
Автоматизація – найважливіший засіб підвищення продуктивності праці, скорочення витрат матеріалу і енергії, поліпшення якості продукції, впровадження прогресивних методів управлінням виробництвом.
На промислових підприємствах в процесі виробництва доводиться переміщати масу вантажів – сировину, напівфабрикати, готову продукцію, матеріали.
Вимоги технології до автоматизації.
Основні вимоги до автоматизації переробки і сушки зерна в дипломному проекті автоматизації зерносушарки ДСП-32 на Заводі елеваторного обладнання для ВАТ «Відродження».
· Забезпечити захист електропроводів від коротких замикань і від перевантажень;
· Дійсний пуск електроприводів тільки після подачі попереджувальної звукової сигналізації в перебігу заданого проміжку часу;
· Дистанційний пуск електроприводів тільки за наявності необхідного тиску 6 кг/см3 стислого повітря для пристроїв;
· Виконання блокованих зв'язків між електроприводами в напрямі зворотному руху продукту;
· Можливість роботи в дистанційному і місцевому режимах;
· Відключення пристроїв (УРЗ), що подають зерно, при заповненні бункерів (Б1, Б2, Б3) і при зупинці стрічкових конвеєрів (КС1, КС2, КС3), встановлених після УРЗ;
· Контроль верхньою рівня в бункерах (Б1, Б2, Б3). Забезпечення захисту від переповнення бункерів;
· Контроль нижнього рівня в бункерах (Б2, Б3);
· Виконання звукової преривистої сигналізації при аварійних ситуаціях;
· Виконання світлової сигналізації про роботу електроприводів, перевантаження (електротепловий (Б1, Б2, Б3).
2. Основні рішення по автоматизації технологічних процесів
2.1 Розробка і опис функціональної схеми автоматизації
Функціональна схема автоматизації дипломного проекту є основним технологічним документом, що визначає функціонально-блокувальну структуру окремих вузлів автоматичного контролю, управління і регулювання технологічного процесу.
Прилади і засоби автоматизації на ФСА позначаються по Госту: ГОСТ-21.404. – 86 «Автоматизація технологічних процесів».
Мій варіант автоматизації розроблений на підставі існуючих рішень і забезпечує виконання всіх необхідних функцій по управлінню технологічним процесом маршруту потрапляння зерна в зерносушарку ДСП-32. Засоби автоматизації, що встановлюються, по місцю на устаткуванні зображені по місцю установки. Внизу в спеціальній таблиці зображені засоби, що встановлюються на пульті управління і в розподільному приміщенні.
2.2 Розробка і опис скелетної схеми блокувань
Розроблена схема блокування маршруту автоматизації зерносушарки ДСП-32 на Заводі елеваторного обладнання для ВАТ «Відродження» забезпечує:
· Контроль і сигналізацію рівнів в бункерах (Б1, Б2, Б3);
· Контроль підпорів головок і черевиків норій (Н1, Н2, Н3);
· Контроль і сигналізацію положення перекидних клапанів (ПК1, ПК2, ПК3) і засувок (ЗЕ1, ЗЕ2, ЗЕ3, ЗЕ4);
· Контроль швидкості стрічок норії (Н1, Н2, Н3) і стрічкових транспортерів (КЛ1, КЛ2, КЛ3);
· Дистанційне, за допомогою щита управління шкафного типу, включення і зміна стану механізмів – засувок (ЗЕ1, ЗЕ2, ЗЕ3, ЗЕ4), перекидних клапанів (ПК1, ПК2, ПК3);
· Дистанційний автоматизований запуск устаткування маршруту, контроль їх стану, аварійне відключення при виході машин з ладу;
· Сигналізацію стану машин при нормальній роботі і у разі аварії.
2.3 Розробка і опис принципової електричної схеми ділянки СДАУ
Будь-яка принципово-електрична схема є поєднанням окремих, достатньо простих електричних ланцюгів, які в заданій послідовності виконують ряд типових операцій: передачу командних сигналів від органів управління вимірювання до виконавських органів, посилення або розмноження командних сигналів або порівняння, блокування сигналів.
Умовно-графічне позначення базується з простих геометричних фігур (квадратів, прямокутників, кіл), а також з суцільних і пунктирних ліній і крапок.
При використанні позначень слід пам'ятати: положення контактів і реле пускачів, кнопок, рубильників і інших комутаційних елементів, зображають на схемах при знеструмленій ділянці ланцюга або за відсутності дії зовнішніх сил. У ПЕС дипломного проекту важливе значення має правильне позиційне позначення елементів і маркувальних ланцюгів і їх ділянок.
Схема пуску технологічного маршруту в дипломному проекті працює таким чином:
Натискаємо кнопку SB (пуску), спрацьовує реле Кс1 і Кт1, включається ланцюг звукової сигналізації по всіх поверхах елеватора, вона триває 10 сек. Потім слідує пауза 5 сек. Після якої контакт Кт1 дає дозвіл на включення маршруту.
Натискаючи Sb3 включаємо реле Кс3 і Кс2 проводячи управління і вибір маршруту. Положення клапанів (ПК1, ПК2, ПК3) встановлюється автоматично.
Пуск устаткування починається з включення аспірації (АС1, АС2). З початку відкриваються засувки прийому зерна з бункерів, а потім сама вентиляція. Після чого включається надсилосний перекидний клапан (ПК3), що дає дозвіл на включення норії (Н3). Після норії по черзі включаються всі машини маршруту. Останнім механізмом є випускна засувка (ЗЕ1) бункера (Б1), яку відкриває оператор, дистанційно з щита шкафного типу. Якщо маршрут не запустився, процедуру пуску повторюють.
3. Специфікація на матеріально-технічні прилади і засоби автоматизації
| Найменування і технічна характеристика | Тип, марка, позначення документа, опросного листа. | Завод-виготовлювач | Од. вим. | Кіл. | Ціна | Вартість |
| 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Автоматичний вимикач | ВА66–29 | ИЕК | шт. | 5 | ||
| Автоматичний вимикач | АП-50 | ИЕК | шт. | 1 | ||
| Автоматичний вимикач | АЗ-124 | ИЕК | шт. | 3 | ||
| Магнітний пускач | ПМЕ | ИЕК | шт. |
3 | ||
| Теплове реле | ТРП | ИЕК | шт. | 3 | ||
| Шафа керування STL 2000х800х600 | STL200606 | м. Одеса, «Юмис-Н» | шт. | 1 | ||
| Кнопка щитова зелена | КЕА-2000 | ИЕК | шт. | 8 | ||
| Кнопка щитова червона | КЕА-2000 | ИЕК | шт. | 3 | ||
| Перемикач на три положення | КЕА-5000 | ИЕК | шт. | 2 | ||
| Перемикач на три положення | ПП-61 | ИЕК | шт. | 2 | ||
| Дзвоник | СС-1 | ИЕК | шт. | 3 | ||
| Блок живлення | БЖ-14 | ИЕК | шт. | 1 | ||
| Світлові індикатори | ИЕК | шт. | 33 | |||
| Датчики руху зерна | МДУ-3 | Завод шахтной автоматики м. Днепро-петровск | шт. | 6 | ||
| Датчики рівня зерна | СУС-11 | Завод шахтной автоматики м. Днепро-петровск | шт. | 7 | ||
| Кінцевий вимикач | ВК-200 | ИЕК | шт. | 6 | ||
| Термометр опору | ТОП-100 | ИЕК | шт. | 4 | ||
| Вологомір | ИЕК | шт. | 3 | |||
| Датчик підпору норії | Завод шахтной автоматики м. Днепро-петровск | шт. | 3 | |||
| Датчик підпору скребкового конв. | шт. | 3 | ||||
| Датчик обрыва цепи | шт. | 6 | ||||
| Датчик контроля швидкості | шт. | 6 | ||||
| Клемна коробка | У-614 | «Електроград» м. Одеса | шт. | 5 |
4. Розрахункова частина
4.1 Розрахунок потужності електроприводів і вибір електродвигунів
Правильний вибір електродвигунів має не мале значення. На підприємствах зберігання і переробки зерна може викликати ряд небажаних чинників. Так наприклад, при виборі менш потужного двигуна може бути порушений технологічний процес, може викликати прискорений вихід з ладу двигунів і установки в цілому. Тому одним з основних завдань для обслуговуючого персоналу є правильний розрахунок і вибір електродвигунів.
1. Розраховуємо необхідну потужність електродвигуна для приводу норії:
Дано: Q=50 (т/час); H=22 (м).
Знайдемо формулу:
Nдв=0,0034* Q*н/н
Проаналізуємо дані:
Де, Q – продуктивність (т/час);
Н – висота підйому продукту (м);
н – ККД передачі, приймаємо по таблиці н=0.94.
Підставимо дані у формулу Nдв і обчислимо:
Nдв=0,0034*50*22/0,94=3,97 (кВт).
Відповідь: По довіднику вибираємо найближчу велику потужність електродвигуна 4 (кВт), серії 4А100L4, з частотою обертання ротора п=1430 (об/мін).
2. Розраховуємо потужність електродвигуна для приводу норії:
Дано: Q=125 (т/час); Н=25 (м).
Знайдемо формулу:
Nдв=0,0034* Q*н/н
Проаналізуємо дані:
Де, Q – продуктивність (т/час);
Н – висота підйому продукту (м);
н – ККД передачі, приймаємо по таблиці н=9. Отримані дані підставляємо у формулу і обчислимо.
Nдв=0,0034*125*25/0,94=11,3 (кВт).
Відповідь: Вибираємо двигун серії 4А160S4, потужністю 15 (кВт) з частотою обертанні ротора п=1465 (об/мін).
3. Розраховуємо потужність електродвигуна для приводу стрічкового конвеєра:
Дано: Q=100 (т/час); L=30 (м);
Знайдемо формулу:
Nдв=q*k (K*l+h) 367*к
Проаналізуємо дані:
Де, Q – продуктивність норії (т/час);
н – ККД передачі, приймаємо по таблиці =0.94;
К – коефіцієнт, що враховує збільшення опір при зерні (К=1.1…1.5), приймаємо 1.2;
Кс – коефіцієнт опору матеріалу, Кс=2;
L – довжина переміщення вантажу (м);
Отримані дані підставляємо у формулу і обчислимо.
Nдв =100*1,2*(2*30)/367*0,94=18,4 (кВт).
Відповідь: Вибираємо двигун серії 4А160М4, потужністю 18.5 (кВт), з частотою обертання п=1465 (об/мін).
Після вибору електродвигуна для їх надійної роботи ібезпеки необхідно зробити правильний вибір пускозахисной апаратури.
Знайдені розрахункові данні занесемо до таблиці.
| № п/п | Серія марки двигуна | Потужність, кВт | Частота обертання, об/хв. | Струм, А | |
| 1 | 4А100L4 | 4 | 1430 | 8,6 | |
| 2 | 4A160S4 | 15 | 1465 | 29,3 | |
| 3 | 4A160M4 | 18,5 | 1465 | 38,5 | |
4.2 Розрахунок і вибір пускозахисної апаратури
Вибір плавких запобіжників.
Плавкі запобіжники призначені для захисту мереж від струмів коротких замикань. Оскільки вони порівняно дешеві, їх застосовують для захисту невідповідних споживачів і групових ліній РП спільно з рубильниками. Запобіжники вибирають за двома умовами:
1) Iн.встiн.дв;
2) Iн.всткн Iн.дв/к
1. Вибираємо плавкий запобіжник для електродвигуна норії серії 4А100L4:
Дано: Iн=8.60 (А); Кп=6; К=3
Знайдемо формулу:
Iн.вст= Кп*iн.дв/к
Проаналізуємо дані:
де, Iн – номінальний струм електродвигуна;
Кп – стислість пускового струму електродвигуна;
До – коефіцієнт, залежний від умов пуску електродвигуна, К=2.3, вибираємо К=3.
Підставимо значення у формулу і розрахуємо:
Iн.вст=6*8.60/3=17.2 (А).
Номінальний струм двигуна, за довідковими даними вибираємо Iн.вст=17.2 (А).
2. Вибираємо плавкий запобіжник для електродвигуна норії серії 4А160S4:
Дано: Iн=29.3 (А); Кп=6; К=3.
Iн.всткн* Iн.дв/к
Знайдемо формулу:
Iн.вст=кп*iн.дв/к
Проаналізуємо дані:
Де, Iн – номінальний струм електродвигуна;
Кп – стислість пускового струму електродвигуна;
До – коефіцієнт, залежний від умов пуску електродвигуна, К=2.3, вибираємо К=3.
Підставимо значення у формулу і розрахуємо:
Iн.вст=6*29.3/3=58.6 (А).
3. Вибираємо плавкий запобіжник для двигуна конвеєра серії 4А160М4:
Дано: Iн=35.8 (А); Кп=6; К=3.
Знайдемо формулу:
Iн.вст=кн*iн.дв/к
Проаналізуємо дані:
Де, Iн – номінальний струм електродвигуна;
Кп – стислість пускового струму електродвигуна;
До – коефіцієнт, залежний від умов пуску електродвигуна, К=2.3, вибираємо К=3.
Підставимо значення у формулу і розрахуємо:
Iн.вст=6*35.8/3=71.6 (А).
Вибір автоматичних вимикачів.
1. Вибираємо автоматичний вимикач для двигуна норії серії 4А100L4:
Дано: Iп /iн=6.5 (А); Рн=4 (квт); Iн=8.6 (А).
За довідковими даними вибираємо автомат типу А3124 з комбінованим расщеплювачем на струм Iн.р=25 (А), що більше Iн=8.6 (А). Установка струму спрацьовування електромагнітного расцеплювачаем =430 (А): пусковий струм електродвигуна:
Iп=6.5* Iн=6.5*8.6=55.9 (А).
2. Вибираємо автоматичний вимикач для двигуна норії серії 4А160S4:
Дано: Рн=15 (квт); Iп /iн=7 (А); Iн=29.3 (А).
За довідковими даними вибираємо вибираємо автомат типу А3124 з комбінованим расцеплювачем на струм Iн.р=30 (А), що більше Iн=29.3 (А). Установка струму спрацьовування електромагнітного расцеплювачаем =430 (А): пусковий струм електродвигуна: Iп=7* Iн=7*29.3=205а.
3. Вибираємо автоматичний вимикач для двигуна конвеєра серії 4А160М4:
Дано: Рн=18.5 (квт); Iн=35.8 (А); Iп /iн=7 (А).
За довідковими даними вибираємо вибираємо автомат типу А3124 з комбінованим расцеплювачем на струм Iн.р=40 (А), що більше Iн=35.8 (А). Установка струму спрацьовування електромагнітного расцеплювачаем =600 (А): пусковий струм електродвигуна: Iп=7* Iн=7*35.8=250.6 (А).
Вибір магнітних пускачів.
Магнітні пускачі вибирають по виконанню і номінальному струму або граничної потужності електродвигуна, що відключається.
При цьому повинна дотримуватися умова:
Iн.м.п.iн.д або Рн.м.п Рн.д.
Iн.м.п і Iн.м.п – номінальний струм і потужність магнітного пускача; Рн.д – номінальний струм і потужність електродвігателя.
1. Вибираємо магнітний пускач для двигуна норії серії 4А100L4.
Дано: Рн=4 (квт); Iн=8.6 (А);
За довідковими даними вибираємо пускач ПМЕ-200 з тепловим реле ТРН-25. Гранична потужність керованого електродвигуна при напрузі 380 (В) рівна 4 (кВт). Номінальний струм нагревателя теплового реле Iн.е=10 (А), максимальний струм Iм.тр=11 (А) за довідковими даними.
2. Вибираємо магнітний пускач для двигуна норії 4А160S4.
Дано: Рн=15 (квт), Iн=29.3 (А).
За довідковими даними вибираємо пускач ПАЇ-300 з тепловим реле ТРН-40. Гранична потужність керованого електродвигуна при напрузі 380 В рівна 15 кВт. Номінальний струм нагревателя теплового реле Iн.е=32 (А), максимальний струм Iм.тр=35.20 (А).
3. Вибираємо магнітний пускач для двигуна конвеєра серії 4А160М4.
Дано: Рн=18.5 (квт); Iн=35.8 (А).
За довідковими даними вибираємо пускач ПАЇ-400 з тепловим реле ТРП-60. Гранична потужність керованого електродвигуна при напрузі 380 В рівна 18.5 (кВт). Номінальний струм нагревателя теплового реле Iн.е=40 (А), максимальний струм Iм.тр=45 (А).
Знайдене комплектне обладнання до двигунів занесемо до таблиці
| № п/п | Серія марки двигуна | Автоматичний вимикач | Магнітний пускач | Теплове реле |
| 1 | 4А100L4 | АЗ124 | ПМЕ-200 | ТРН-25 |
| 2 | 4A160S4 | АЗ124 | ПАЇ-300 | ТРН-40 |
| 3 | 4A160M4 | АЗ124 | ПАЇ-400 | ТРП-60 |
4.3 Розрахунок електропроводів і кабелів
Силові ланцюги виконують в основному кабелями АПВГ, АВВГ, АВРГ, ВРГ, АНРГ, ВРБ, АВРБ, Апсвг або проводами АПВ, АПВР, АПРТО.
Мережі управління виконують контрольними кабелями АКНРГ, АКСРГ, Акпсвг, проводами АПВ, АПРВ, АПРТО. Для ланцюгів вимірювання використовують кабелі і дроти аналогічних марок, але з мідними жилами.
Кабельний журнал до схеми зовнішніх підключень
| Кабель дроту | Траса | Призначення ланцюгів | |||||
| Початок | Кінець | По проекту | |||||
| Обозначення, dу | Діаметр по стандарту, мм | Довжина, м | Марка | Кіл-ть, число і перетин жил | |||
| SL1 | Клемна коробка КК1/1 | Датчик рівня Sl1 | L2 | 21.3х2.8 | КВВГ | ||
| SL1 | Клемна коробка КК1/2 | Датчик рівня Sl1 | N | 21.3х2.9 | КВВГ | ||
| SL1 | Клемна коробка КК1/3 | Датчик рівня Sl1 | 20 | 21.3х2.10 | КВВГ | ||
| SL2 | Клемна коробка КК1/4 | Датчик рівня Sl2 | L2 | 21.3х2.11 | КВВГ | ||
| SL2 | Клемна коробка КК1/5 | Датчик рівня Sl2 | N | 21.3х2.12 | КВВГ | ||
| SL2 | Клемна коробка КК1/6 | Датчик рівня Sl2 | 21 | 21.3х2.13 | КВВГ | ||
| SL3 | Клемна коробка КК1/7 | Датчик рівня Sl3 | L2 | 21.3х2.14 | КВВГ | ||
| SL3 | Клемна коробка КК1/8 | Датчик рівня Sl3 | N | 21.3х2.15 | КВВГ | ||
| SL3 | Клемна коробка КК1/9 | Датчик рівня Sl3 | 22 | 21.3х2.16 | КВВГ | ||
| SL4 | Клемна коробка КК1/10 | Датчик рівня Sl4 | L2 | 21.3х2.17 | КВВГ | ||
| SL4 | Клемна коробка КК1/11 | Датчик рівня Sl4 | N | 21.3х2.18 | КВВГ | ||
| SL4 | Клемна коробка КК1/12 | Датчик рівня Sl4 | 23 | 21.3х2.19 | КВВГ | ||
| SL5 | Клемна коробка КК1/13 | Датчик рівня Sl5 | L2 | 21.3х2.20 | КВВГ | ||
| SL5 | Клемна коробка КК1/14 | Датчик рівня Sl5 | N | 21.3х2.21 | КВВГ | ||
| SL5 | Клемна коробка КК1/15 | Датчик рівня Sl5 | 24 | 21.3х2.22 | КВВГ | ||
| SL6 | Клемна коробка КК1/16 | Датчик рівня Sl6 | L2 | 21.3х2.23 | КВВГ | ||
| SL6 | Клемна коробка КК1/17 | Датчик рівня Sl6 | N | 21.3х2.24 | КВВГ | ||
| SL6 | Клемна коробка КК1/18 | Датчик рівня Sl6 | 25 | 21.3х2.25 | КВВГ | ||
| SL7 | Клемна коробка КК1/19 | Датчик рівня Sl7 | L2 | 21.3х2.26 | КВВГ | ||
| SL7 | Клемна коробка КК1/20 | Датчик рівня Sl7 | N | 21.3х2.27 | КВВГ | ||
| SL7 | Клемна коробка КК1/21 | Датчик рівня Sl7 | 26 | 21.3х2.28 | КВВГ | ||
| SQ1 | Клемна коробка КК2/1 | Датчик руху зерна SQ1 | L2 | 21.3х2.9 | КВВГ | ||
| SQ1 | Клемна коробка КК2/2 | Датчик руху зерна SQ1 | N | 21.3х2.10 | КВВГ | ||
| SQ1 | Клемна коробка КК2/3 | Датчик руху зерна SQ1 | 27 | 21.3х2.11 | КВВГ | ||
| SQ2 | Клемна коробка КК2/4 | Датчик руху зерна SQ2 | L2 | 21.3х2.11 | КВВГ | ||
| SQ2 | Клемна коробка КК2/5 | Датчик руху зерна SQ2 | N | 21.3х2.13 | КВВГ | ||
| SQ2 | Клемна коробка КК2/6 | Датчик руху зерна SQ2 | 28 | 21.3х2.14 | КВВГ | ||
| SQ3 | Клемна коробка КК2/7 | Датчик руху зерна SQ3 | L2 | 21.3х2.15 | КВВГ | ||
| SQ3 | Клемна коробка КК2/8 | Датчик руху зерна SQ3 | N | 21.3х2.16 | КВВГ | ||
| SQ3 | Клемна коробка КК2/9 | Датчик руху зерна SQ3 | 29 | 21.3х2.17 | КВВГ | ||
| SQ4 | Клемна коробка КК2/10 | Датчик руху зерна SQ4 | L2 | 21.3х2.18 | КВВГ | ||
| SQ4 | Клемна коробка КК2/11 | Датчик руху зерна SQ4 | N | 21.3х2.19 | КВВГ | ||
| SQ4 | Клемна коробка КК2/12 | Датчик руху зерна SQ4 | 30 | 21.3х2.20 | КВВГ | ||
| SQ5 | Клемна коробка КК2/13 | Датчик руху зерна SQ5 | L2 | 21.3х2.21 | КВВГ | ||
| SQ5 | Клемна коробка КК2/14 | Датчик руху зерна SQ5 | N | 21.3х2.22 | КВВГ | ||
| SQ5 | Клемна коробка КК2/15 | Датчик руху зерна SQ5 | 31 | 21.3х2.23 | КВВГ | ||
| SQ6 | Клемна коробка КК2/16 | Датчик руху зерна SQ6 | L2 | 21.3х2.24 | КВВГ | ||
| SQ6 | Клемна коробка КК2/17 | Датчик руху зерна SQ6 | N | 21.3х2.25 | КВВГ | ||
| SQ6 | Клемна коробка КК2/18 | Датчик руху зерна SQ6 | 32 | 21.3х2.28 | КВВГ | ||
У мережах напругою до 1000 В перетини провідників вибирають:
a) По нагріванню розрахунковим струмом, що допускається, користуючись рівнянням
k1ktiд-iр
де: к1 – поправочний коефіцієнт на число кабелів, лежачих поряд, к1=1.0;
kt – поправочний коефіцієнт на фактичну температуру середовища, kt = 1.0;
Iд – струм, що тривало допускається, на провідник;
Р – розрахунковий струм в провіднику (Iр = 1.25н при прокладці у вибухонебезпечних приміщеннях класу В – Iiа, в решті випадків Iр = Iн).
b) За умовами захисту перетину апаратом захисту, користуючись рівнянням:
k1ktiд-kзiз
де: kз – коефіцієнт захисту (kз = 1.0 при захисті
автоматами з тепловим або комбінованим расцепітелем; kз = 1.25 при захисті автоматами з електромагнітним расцепітелем);
Iз – номінальний струм або струм захисного апарату. Для автоматів з тепловим або комбінованим расцеплювачем за величину Iз слід приймати номінальний струм расцеплювача; за наявності тільки електромагнітного расцеплювача струм Iз рівний струму спрацьовування електромагнітного расцеплювача.
По втраті напруги. Для мережі, що живить одиночний двигун втрату напруги (В) знаходять по формулі:
– Uотв = (Рн*r0*1*1000)/(Uн*знн)
Де: Рн – номінальна потужність електродвигуна, квт;
R0 – опір одного кілометра лінії, Ом/км.;
1 – довжина лінії від РП до електродвигуна, км.; визначаємо за планом приміщення з обліком висотою поверхів;
Uн = 380 В;
зн – ККД електродвигуна.
1. Відповідно до приведеного вище розрахунку розрахуємо лінію від РП до електродвигуна норії серії 4А100L4 з номінальною потужністю 3.97 кВт, з номінальним струмом – 8.60 А, кратністю пускового струму -6.
Ip = 1,0*1,0*8,60 = 8,60
Слід вибрати кабель із струмом, що тривало допускається, на провідник Iд-а.
По таблиці вибираємо кабель марки АПВГ з перетином струмопровідної алюмінієвої жили 1,5 мм2 і струмом Iд =19 А в повітрі.
Відповідно до першого розрахунку, розрахуємо другі два двигуна, данні занесемо в таблицю.
| № п/п | Марка двигуна | Потужність, кВт | Струм, А | Кабель марки | Перетин жил, мм | Прохід через | |
| 1 | 4A100L4 | 3,97 | 8,60 | АПВГ | 1,5 | Повітря | |
| 2 | 4A160S4 | 15 | 29,3 | АПВГ | 2,5 | Повітря | |
| 3 | 4A160M4 | 18,5 | 35,8 | АПВГ | 4 | Повітря | |
4.4 Розрахунок блоку живлення
Визначимо струм вторинної обмотки. Для цього обчислюємо сумарний струм споживачів всіма елементами ланцюгів сигналізації в дипломному проекті розробки зерносушарки ДСП-32 на Одеському Заводі Елеваторного Обладнання для ООО «Відродження».
I=п1 *iн1 +п2 *iн2
Де: п1 – кількість ламп сигналізації; п2 – кількість реле; Iн1 – 0.015 (А);
Iн2 – 0.40 (А);
I=33*0.015+33*0.40=0,495+13,2=13,6 (А).
Враховуючи наявність необхідного резерву потужності в межах 20%, приймаємо як початкове значення струм рівний:
I=2.18*кз;
I=13,6*1.2=16,32=16 (А).
Згідно початковій умові визначуваний струм первинної обмотки:
I=u/u*i
Де: U – напруга вторинної обмотки;
U – напруга первинної обмотки.
I=48/220*16=3,4 (А).
Вибираємо розрахункову потужність трансформатора:
Sтр=u*i
Sтр=48*16=768.
5. Розробка монтажної схеми
5.1 Розробка загального виду щита управління шкафного типу
Щитом управління є площина з листового метала в якій прорізаються отвори для установки кнопок і перемикачів управління. Кількість і призначення елементів управління визначена по принциповій електричній схемі ділянки. Послідовність органів управління звітує логіці управляючих дій оператора: вибір маршруту, пуск і стоп сигналізації, пуск і стоп маршруту, вибір і управління засувкою, перевірка ламп сигналізації і так далі.
За моїм завданням розробки Зерносушарки ДСП-32, панель управління має шафовий тип який розроблений в одному документі – загальному виді щита.
Перелік застосованих на панелі управління елементів в специфікації. Поряд з кожним елементом розташована пояснювальна таблична.
5.2 Розробка монтажної схеми щита управління
Монтажна схема щита управління складена керуючись принциповій електричній схемі ділянки і загальним видом панелі управління дипломного проекту розробки зерносушарки ДСП-32 на Одеському Заводі Елеваторного Обладнання для ООО «Відродження».
Кожен елемент схеми, зображений з його схемою підключення, враховуючи кількість використовуваних контактів і указаних номерів клем. Далі зображені ті, що підключаються до клемам дроти. Напроти дроту вказана адреса – буква і цифра яка позначає клемник, на який дріт приходить, номер після розділового знаку – номер клеми указаного клемника (аналогічно панелі сигналізації).
Дроти від клемника об'єднуються в загальний кабель і направляються в робоче приміщення (РП).
До монтажної схеми щита шкафного типу (панелі сигналізації і панелі управління) додається таблиця з'єднання проводок і таблиця підключення проводок. У таблиці з'єднання проводок відображені з'єднання між елементами пульта управління, а в таблиці підключення проводок відображено підключення проводів до клемам кожного з елементів пульта.
5.3 Розробка схеми зовнішніх з'єднань ділянки СДАУ
Схема зовнішніх підключень відображає електричні з'єднання між пультом і засобами автоматизації, встановленими по місцю (на об'єкті).
На схемі зовнішніх підключень (зовнішніх проводок) згідно з темою дипломного проекту розробки зерносушарки ДСП-32 на Одеському Заводі Елеваторного Обладнання для ООО «Відродження», в узагальненому вигляді зображені окремі ділянки електричних схем.
Схема зовнішніх проводок містить: щити (Щ) і пульти управління (ПУ), місцеві пункти контролю і встановлені в них щитові прилади і засоби автоматизації, приєднання проводок до щитів, пультів, приладів і т.д., а також технічні вказівки і умовні графічні зображення (УГО).
Схема зовнішніх проводок узгоджуються з кресленнями монтажних схем щитів, пультів, а також з планами розташування устаткування і засобів автоматизації.
Схема виконана без дотримання масштабу. На схемі над або під УГО датчиків, приладів, виконавчих механізмів і так далі розміщені написи пояснень.
Для кожної електричної проводки приводиться її технічна характеристика, куди входить: тип (марка) проводки або кабелю, число жив, їх перетин, для кабелю вказано число використовуваних жил (у прямокутнику).
Для трубних проводок вказані тип, довжина і діаметр труби. За наявності в схемі кабелів або труб однієї марки, їх параметри допускається указувати на одній виносній лінії.
Всі кабелі мають послідовну нумерацію, відповідно до якої, за наявності великої кількості кабелів, складаний кабельний журнал.
Внещитові вторинні прилади і сполучні коробки розміщують на кресленні між таблицею і зображенням щитів. Для клемних кородок указують їх порядковий номер. Для приладів вказаних в схемі внутрішніх з'єднань за винятком дзвінків, сигнальних ламп і інших засобів, що мають однозначне підключення.
Для зменшення кількості проводів і економії кабельної продукції групи датчиків розташовані в безпосередній близькості підключаються роздільними кабелями до виділеного клемного ящика, а потім одним кабелем прямують в робоче приміщення.
Для ув'язки схеми зовнішніх підключень з монтажними схемами релейного приміщення на кінці кабелю відповідному РП вказаний номер до якої він підключається.
6. Рекомендації по монтажу і наладці
Монтаж систем автоматизації є складний комплекс робот, що виконується спеціалізованими монтажними організаціями в зв’язку з проектом і технічними умовами, що діють.
Для настройки і перевірки вимикачів застосовується об'єкт дії у вигляді заземленої пластини, виготовленої із сталі Ст. 40, завтовшки 1 мм, із стороною квадрата 60 мм.
Монтаж і демонтаж вимикачів повинен проводиться за допомогою інструменту, що виключає деформацію корпусу. Момент, що крутить, при затягуванні гайок не більше 5.0.
Виробництво монтажних робіт можна розділити на наступні групи: монтаж первинних вимірювальних перетворювачів; монтаж приладів, регуляторів; монтаж пультів і щитів; монтаж трубних проводок; монтаж електропроводок.
У тих випадках, коли об'єм монтажних робіт невеликий, їх можуть виконувати монтажні підрозділи підприємств. Виконанню монтажних робіт повинна передувати спеціальна підготовка, під час якої готується документація на виконання монтажних робіт, забезпечення необхідними матеріалами, конструкціями, устаткуванням.
Безпосередньо монтаж виконується в два етапи відповідно до проекту ТУ і інструкціями заводів – виготовників. На першому етапі виконують заготовку монтажних конструкцій, вузлів і блоків, елементів електропроводок і їх укрупнену збірку поза зоною монтажу; перевіряють наявність закладених конструкцій, отворів, кріплень, добірних пристроїв, наявність заземлюючої мережі; закладають короби, розмічають траси для електричних і трубних дротів.
На другому етапі прокладають проводки, розміщують щити, прилади і засоби автоматизації, підключають до них трубні і електричні проводки.
Монтажні роботи на об'єкті виконують монтажні бригади. Приймання змонтованих систем автоматизації здійснюється спеціально створюваною комісією, про результати приймання створюється відповідний акт, після чого об'єкт передається під пусконалагоджувальні роботи.
Необхідно відзначити, що монтаж засобів автоматики проводиться на підставі схем розташування устаткування на поверхах, монтажних таблиць, електромонтажних схем, монтажно-настановних креслень, кабельного журналу.
Кнопки місцевого управління, пульти місцевого управління, клемні ящики і сполучні короба кріпляться на колонах або стінах відповідно до типових монтажних креслень. Їх підключення проводиться з використанням кабелів і трубних проводок згідно з схемою зовнішніх з'єднань і розташування елементів на поверхах. Засоби автоматизації розташовані на технологічному устаткуванні, машинах або механізмах кріпляться відповідно до монтажних креслень даного устаткування або відповідно до типових монтажних креслень.
Для забезпечення безпеки виробництва монтажних праць до початку монтажу в проектах виробництва робіт розробляють заходи щодо техніки безпеки. Будівельно-монтажні роботи на елеваторах потрібно виконувати за проектом і з дотриманням технічних умов. Відступ від проекту і встановлених технічних умов, як, наприклад, зменшення розмірів шахти, неправильне виготовлення або установка коробів і інше, може надалі при експлуатації сушарки привести до зменшення її продуктивності і погіршення якості просушуваного зерна.
Перед початком монтажу устаткування перевіряють правильність виконання будівельних робіт.
Панелі сполучають між собою електрозварюванням. Місця нещільного прилягання панелей заливають бетоном.
Установку і одночасно закладення в підлозі коробів в стінці шахти починають з верхнього ряду, щоб цементний розчин не міг потрапити на короби, що знаходяться нижче. Короби потрібно встановлювати в п'ятигранні отвори шахти без перекосу. Короби і напівкороби встановлюють так, щоб їх денця знаходилися в одній площині з внутрішньою стінкою шахти, інакше пил і сміття будуть накопичуваться в западині гнізда. Після установки кожного ряду коробів стінки шахти гладко затирають цементним розчином, не залишаючи щілин. Гнізда зовні денець закладають глиняними або слабким цементним розчином, що дозволяє у разі заміни короба легко вийняти його з шахти після видалення закладення.
Електродвигуни, електроапаратура, світильники, електромережі, укладені в трубах, повинні бути ретельно заземлені. В цілях протипожежної безпеки зерносушарки виготовляють із залізобетону і сталі, а приміщення їх з цеглини і бетону.
При сильному перегріві зерна в сушильній камері, а також при попаданні в нього іскор з топки, можливо, гніздове загоряння зерна, яке потім може захопити решту зернового об'єму шахти.
Небезпека загоряння зерна в сушильній камері збільшується, коли в ній накопичується легко займисте сміття. Тому правилами протипожежної безпеки передбачається очищення зерна, що просушується в шахтних зерносушарках, дотримання встановлених температурних режимів і усунення затримки при русі зерна в шахті.
Необхідно також дотримувати правила обслуговування топки, підтримувати в справному стані всі іскроулавлівающие пристрої і періодично очищати їх від золи і сажі.
Причинами виникнення вогнища загоряння в приміщенні зерносушарки або біля неї можуть бути викидання іскор з вихлопної труби, загорання сажі в топковій трубі або в димарях, підшипників, коротке замикання електропроводів і ін., тому обслуговуючий персонал повинен ретельно стежити за станом газоходів і розпалювальних труб топки, вихлопних труб, перевіряти стан підшипників.
Електропроводка, пускові прилади і запобіжники, а також електродвигуни повинні знаходитися завжди в повній справності і не перегріватися. Для гасіння пожежі в приміщенні зерносушарки на всіх поверхах встановлюють на видних місцях вогнегасники і ящики з піском, весь протипожежний інвентар необхідно зберігати в призначеному для нього місці і в справному стані.
7. Техніко-економічне обґрунтування проекту і кошторисна вартість капітальних витрат
В результаті удосконалення схеми управління зерносушарки ДСП-32 на Одеському Заводі Елеваторного Обладнання для ТОВ «Відродження» були реалізовані наступні функції:
1) Виконується попереджувальна сигналізація про запуск технологічного устаткування;
2) Здійснення дистанційного пуску і зупинки технологічного устаткування з щита диспечерського управління;
3) В результаті удосконалення зерносушарки ДСП-32 термометрами опору типу ТСП-100 підвищилася точність вимірювання температури в першій і другій зоні сушки зерна.
Після реалізації і удосконалення маршруту дипломного проекту була виявлена економія витрат на електроенергію (![]() Ре =6841300 кВт*год). Потужність двигуна зерносушарки ДСП-32 за одну годину роботи рівна 18,5 квт.
Ре =6841300 кВт*год). Потужність двигуна зерносушарки ДСП-32 за одну годину роботи рівна 18,5 квт.
З’явилась економія заробітної плати (26954 грн.) обслуговуючого персоналу – на одного робочого четвертого розряду з оплатою 10,20 грн/година.
Коштовно-фінансовий розрахунок засобів автоматизації
| Назва засобів автоматизації | Кількість, шт. | Вартість одиниці | Вартість всього | Транспортні витрати | Складські витрати | Балансова вартість | ||||
| Пр | М | Н | Пр | М | Н | |||||
Пускачі: ПМЕ |
3 | 96 | 9,6 | 4,8 | 288 | 28,8 | 14,4 | 7,68 | 1,92 | 120 |
Автоматичні вимикачі: АЗ-124 |
3 | 111 | 11,1 | 5,6 | 333 | 33,3 | 16,7 | 8,88 | 2,22 | 139 |
ДУ: СУС-11 |
7 | 386 | 38,6 | 19,3 | 2702 | 270,2 | 135,1 | 30,88 | 7,72 | 483 |
| Всього: | 13 | - | 59,3 | 29,7 | 3323 | 332,3 | 166,2 | 47,44 | 11,86 | 742 |
Пр АЗ-124 всього = 3*111 = 333 грн.;
М АЗ-124 всього = 10*333/100 = 33,3 грн.;
Н АЗ-124 всього = 5*333/100 = 16,65 грн.;
Пр СУС-11 всього =7*386 = 2702 грн.;
М СУС-11 всього = 10*2702/100 =270,2 грн.;
Н СУС-11 всього = 5*2702/100 = 135,1 грн.;
Тр всього = 8*96/100 =7,68 грн.;
Ск всього = 2*96/100 =1,92 грн.;
Ба пме =96+7,68+1,92+9,6+4,8=120 грн.;
2. Робочий період
Робочий період – це час роботи технологічного обладнання.
Тривалість капітального ремонту залежить від:
· Добової продуктивності підприємства;
· Технічного стану обладнання;
· Якості виконання усіх видів ремонту;
· Фінансування ремонтних робіт.
Капітальний ремонт – діб за рік;
· Газація – діб за рік;
· Поточний ремонт – доби за місяць;
· Інші зупинки – доби за рік.
Робочий період складається:
Рп = Кфм – Пз
Де: Рп – робочий період (діб);
Кфм – календарний фонд часу (діб);
Пз – планові зупинки (діб).
Рп = 365 – 150 = 215 діб.
Коефіцієнт використання робочого часу:
Кв = Рп / Кфм
Де: Кв – коефіцієнт використання робочого часу.
Кв = 215/365 = 0.58.
Вихідні дні – два дня на тиждень:
I квартал – 26 діб;
II квартал – 26 діб;
III квартал – 26 діб;
IV квартал – 26 діб.
3. Вартість електроенергії
Для визначення вартості електроенергії треба знайти заявлену потужність:
N = Ре*1/100
Ce = Pe![]() a
a
Де: N – заявлена потужність, кВт;
Ре – витрати електроенергії на технологічні цілі кВт![]() год;
год;
Wyд – норматив витрат електроенергії на одну тону борошна, кВт![]() г;
г;
Се – вартість електроенергії, грн.;
а – тариф за 1 кВт![]() ч, грн.;
ч, грн.;
в-тариф за 1 кВт![]() ч, грн.
ч, грн.
Розрахункові дані до таблиці
N = 31820*1/100= 318кВт;
Ce = 31820*0,416=13237 грн.
Вартість електроенергії
| Показники | Позначення | Одиниці вимірювання | Величина |
| Витрати електроенергії на технічні цілі | Ре | кВт |
31820 |
| Тариф за 1 кВт |
а | грн. | 0,416 |
| Заявлена потужність | N | кВт | 318 |
| Загальна вартість електроенергії | Се | грн. | 13237 |
Визначаємо економію витрат електроенергії після автоматизації:
![]() Ре=Ре*Рп
Ре=Ре*Рп
Де: ![]() Ре – економія витрати електроенергії, кВт*год;
Ре – економія витрати електроенергії, кВт*год;
Ре – витрати електроенергії на технічні цілі, кВт*год;
Рп – робочий період підприємства, діб.
Розрахунок:
![]() Ре = 31820*215 = 6841300 кВт*год
Ре = 31820*215 = 6841300 кВт*год
Визначаємо економію вартості електроенергії після автоматизації:
Се2 = ![]() Ре * а
Ре * а
![]() Се = Се – Се2
Се = Се – Се2
Де: ![]() Се – економія вартості електроенергії, грн..;
Се – економія вартості електроенергії, грн..;
а – тариф за 1 кВт*г, грн., (а = 0,416);
Розрахунок:
Се2 =6841300 *0,416 = 2845981 грн.
![]() Се=13237–2845981= -2832744 грн.
Се=13237–2845981= -2832744 грн.
4. Фонд заробітної плати.
Чисельність персоналу підприємства
| Професія | Чисельність, чол. | Відсотки від загальної чисельності |
| Допоміжні робочі | 1 | 20 |
ФЗПо = ГТС![]() Т
Т![]() Кр
Кр
Де: ФЗПо – фонд заробітної плати, грн.;
ГТС – годинно-тарифна ставка, грн.;
Т – річний фонд робочого часу, год. Т = 2002;
Кр – кількість робочих даного розряду, чол.
Д =%д![]() ФЗП
ФЗП![]() 100
100
Пр =%пр![]() ФЗП
ФЗП![]() 100
100
Де: Д – доплата, грн.;
Пр – премія, грн.;
%д – відсотки доплати, %;
%пр – відсотки премії, %.
Доплата для допоміжних робітників % д = 12 грн.
Премія для допоміжних робітників% пр = 20 грн.
ФЗП заг = ФЗП о + Д + Пр
Де: ФЗП заг – загальний фонд заробітної плати, грн.
Розрахуємо заробітну плату:
ФЗП доп. роб =10,20*2002*1 =20420,4 грн.;
Д доп. роб =20420,4*12/100 = 2450 грн.;
Пр дп. роб =20420,4*20/100 = 4084 грн.;
ФЗП заг ап. роб =20420,4+2450+4084 =26954 грн.;
Фонд заробітної плати
| Назва професії | Кількість, чол. | Розряд | ГТС, ставка, грн. | Річний фонд, грн. | Доплата, грн. | Премія, грн. | Загальна, грн. |
| Допоміжні робітники | 1 | 4 | 10,20 | 20420 | 2450 | 4084 | 26954 |
Обчислимо економію заробітної плати:
ФЗП доп. роб =10,20*2002*1 =20420,4 грн.;
Д доп. роб =20420,4 *12/100 = 2450 грн.;
ФЗП заг ап. роб =20420,4 +2450+4084 =26954 грн.;
Визначимо показник економічної діяльності:
Т=Ба2 /Э
Де: Т – час окупності, рік;
Ба з.а. – балансова вартість засобів автоматизації, грн.;
Э – економія коштів у зв’язку з автоматизацією, грн.
Т =1335,6 /-2805790= -4,7 рік.
Ба2 = Ба*1.8
Ба2 = 742*1,8 = 1335,6 грн.
Э=![]() Се+
Се+![]() ФЗП
ФЗП
Э=-2832744+26954=-2805790
Переведемо роки у дні:
Т = -4,7*300/28 = -50,35 ≈ -50
Т = -50 днів.
Коефіцієнт економічної ефективності
Е = 1 / Т
Е = 1/-50 = -0,02.
Врисновок
Дипломна робота була розроблена для удосконалення процесу розробки Зерносушарки ДСП-32 на Одеському Заводі Елеваторного Обладнання для ТОВ «Відродження».
В ході роботи були виконані наступні дії:
· Виконана схема автоматизації функціональна;
· Виконана схема електрична принципіальна (управління, сигналізації, захисту і блокіровок);
· Креслення загального виду щита управління;
· Монтажна схема щита управління;
· Виконана схема зовнішніх електричних проводок.
Основна частина дипломного проекту необхідна була для короткої характеристики об'єкту, його основні рішення по автоматизації технологічних процесів, а також обґрунтування матеріально технічних засобів автоматизації.
Розрахункова частина необхідна була для вибору електродвигунів до даного устаткування, а також вибір електропроводів, кабелів і розрахунок блоку живлення.
Розділ розробки монтажних схем необхідний був для пояснення і розробки загального виду щита управління, монтажної схеми і схеми зовнішніх з'єднань.
Завершальна частина проекту необхідна була для рекомендації по монтажу і наладці, а також проведення правив по техніці безпеки.
Список літератури
1. О.А. Новицький «Курсове і дипломне проектування по автоматизації підприємства»: – М.: Колос, 1992.
2. В.Г. Ладанюк і ін. «Проектування, монтаж і експлуатація систем автоматизації в харчовій промисловості. – М.: Агропроміздат, 1991.
3. Сегеда Д.Р. і ін. «Довідник електрика підприємства по зберіганню і переробці зерна» – М.: Колос, 1978.
4. Сорочинський А.В. Войтов П.П. «Курсове і дипломне проектування електроустаткування підприємств по зберіганню і переробці зерна» – М.: Агропроміздат, 1986.
Похожие рефераты:
Електропоїзди постійного струму
Оптимізація параметрів динамічної системи підресорювання корпуса БТР
Економiчна ефективнiсть виробництва зерна
Формування економiчної ефективностi виробництва зерна в господарствi (ТОВ Великоглибочецьке)
Електропостачання металообробного цеху ВАТ "Завод ім. Фрунзе"
Проблеми ефективності виробництва та формування ринку зерна
Технологія виробництва медичного скла
Ділянка діагностики та ремонту ДВС у АТП на 350 автомобілів
Автоматизована система керування заводу по виготовленню цегли
ВАТ "Вібросепаратор" - лідер ринку сільськогосподарської техніки з обробки зернових
Автоматизація котельні на ТЗВ "Волинь-Шифер"
Автоматизация участка приема зерна с автотранспорта со следующей очисткой на элеваторе ЛВ 4*175
Автомобілі з гібридною трансміссією і комбінованою енергетичною установкою
Технологія та структура лінії пакування гипсокартоних аркушів